多尺度全局自适应注意力图神经网络
2023-12-08 11:49苟茹茹杨文柱罗梓菲原云峰
计算机与生活 2023年12期
苟茹茹,杨文柱,2+,罗梓菲,原云峰
1.河北大学 网络空间安全与计算机学院,河北 保定 071002
2.河北大学 河北省机器视觉工程研究中心,河北 保定 071002
人体运动预测已成为当今计算机视觉的研究热点之一。在众多领域都有广泛的应用,例如:自动驾驶、智能视频监控、智能医疗监护、人机交互和人体跟踪[1]等。以往的方法中大多使用隐马尔可夫链、受限玻尔兹曼机、随机森林和高斯过程动力学模型等,在简单的周期运动中取得了超出预想的效果,但是对于复杂动作的预测结果却不尽如人意。由于人体运动具有非周期性和随机性的特点,准确预测未来运动姿势仍是一项具有挑战性的任务。
随着深度学习方法的发展,循环神经网络[2]、卷积神经网络[3-4]和生成对抗神经网络[5-6]都在解决这一挑战上取得了重大的突破。但是这些方法的预测精确度都受卷积滤波器大小和逐帧预测稳定性的影响,且都忽略了运动中身体关节的时间相关性。基于关节点的图卷积神经网络[7]能够很好地捕捉运动中身体关节的时间相关性[8]。因此,基于骨架的图卷积神经网络已广泛应用于运动预测和其他各个领域,且取得了良好的效果。Mao 等人[9]设计了一个完全联通的图卷积,以自适应地学习运动预测所需要的连通信息,并应用离散余弦变换[10-13]构建了跨身体关节的图形处理时间信息,从而实现了对成对关系的建模。但是这样的图表仍然不足以反映身体关节组件之间的联系。Wang等人[14]设计了新型的深度学习网络来模拟时空方差,并通过预定义结构构建了身体关节特征,用于表示固定的身体部位,但是该模型没有利用运动的协同关系。例如,“招手”的动作往往是基于抽象的手臂和手的协同运动来预测的,而不是手臂和手指的详细位置。为解决这些问题,Li等人[15]通过人体姿势的自然层次结构,借助时空图卷积神经网络与多尺度[16]联合构建编码器提取丰富的运动特征,通过基于可训练图卷积神经网络的门控循环单元[17]构建解码器结构来生成运动的未来姿势。但是该模型存在以下三个问题:(1)编解码网络中的时空图卷积神经网络使用的分区策略不利于提取身体部位内部关节点之间的关联关系;(2)编码网络中使用的时空图卷积网络局限于每个节点的共享变换矩阵,不利于全局特征的学习,不利于网络排除不相关关节点,且动态地关注对动作贡献度高的关节点;(3)解码网络中的可训练图卷积神经网络存在同样的问题,导致网络的预测误差较大。
基于此,本文对动态多尺度图卷积模型(dynamic multiscale graph neural networks,DMGNN)进行了改进,主要贡献包括:(1)提出了多距离分区策略(multidistance partitioning strategy,MD),该分区策略加强了身体部位内部关节点的相对位置之间的联系,有利于提高身体关节点信息在空间和时间上的联系;(2)通过时空图卷积神经网络的时空块和非局部网络,组成全局自适应注意力时空图卷积神经网络(global adaptive attention spatial temporal graph convolutional network,GaST-GCN)模块,动态地捕捉骨架中高贡献关节点的时空的全局和远程关系,以解决接受域有限及无关关节干扰的问题;(3)在图卷积门控单元的图卷积中使用多距离分区策略以及全局自适应注意力,组成多距离全局自适应注意力图卷积门控循环单元(multi-distance partitioned global adaptive attention graph convolution gate recurrent unit,MGG-GRU),这样既可以保证关节点间的局部联系,又可以提高全局中高贡献关节点的关注度,从而增强解码网络的状态传播性能。
1 相关工作
1.1 ST-GCN算法
ST-GCN(spatial temporal graph convolution networks)[18]算法不同于使用递归神经网络和临时卷积神经网络构建的端到端的动作识别模型[19-21],是一种基于关节点的动作识别算法。ST-GCN 首次将图卷积神经网络应用于基于骨架的人体动作识别中。在此基础上通过人体自然连接和相同关节的跨连续时间连接构建了骨架序列的时空图,从而加入了对识别人体行为非常重要的关节点之间的时空关系这一因素,使得信息可以沿着图和时间维度进行整合。
ST-GCN 通过三种分区策略设计空间卷积核。如图1 所示,其中(a)为输入骨架。(b)为单标签分区,将整个邻域分为一个子集。(c)为距离分区,通过节点之间的距离设置分区。选取K=1,将邻域分为两个子集,分别是距离为0 的子集和距离为1 的子集。得到两个不同的权重向量,能够对关节点的局部差异性进行建模。(d)为空间结构分区,通过人体运动特性确定人体关节点中的重心节点(一个框架中所有关节点的平均坐标被视为其重心,以红色点表示重心为参考),根据从重心到关节点的平均距离将邻域划分为三个子集,分别为:根节点自身子集、距离重心节点较根节点近的子集、距离重心节点较根节点远的子集。
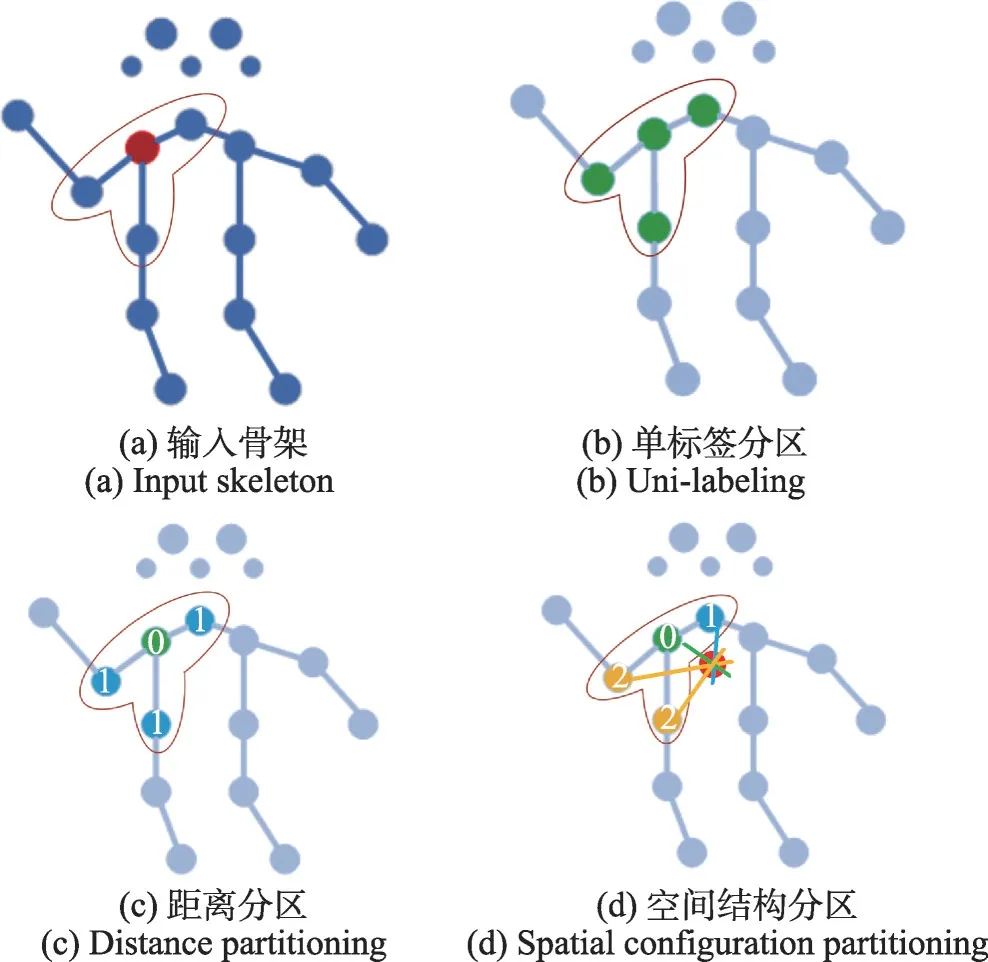
图1 分区策略Fig.1 Partitioning strategy
由于人运动时,关节点是以局部小组为单位移动的,本文中根据节点到根节点间的距离来划分邻域集。通过扩大整个邻域子集,进而关联根节点与更远节点之间的局部关系来加强身体各部分内部关节信息的关联,使模型能更敏感地感知身体局部信息,从而提升动态多尺度编码器提取特征的准确度。
1.2 NLNet
在深度神经网络中为了捕获长距离依赖,通常通过堆叠卷积层实现,这种方法虽然能够增大感受野,但计算效率低、建模困难、优化困难。而用于图像分类和语义分割的NLNet(non-local neural network)[22-23]不局限于相邻点,通过计算任意两个位置之间的交互直接捕捉远程依赖关系,摒弃了距离概念。NLNet 的基本原理是先计算某点(点为向量,维度是通道数)与其余所有点的相似度,相似度越大,对最终的结果贡献就越大。对相似度进行归一化,得到各个点的权重。权重与对应点的特征映射值相乘,再与先前输入的点的特征相加就得到了包含全局信息的特征。
当人体在散步时,胳膊和腿上的关节点做出的贡献远大于其他关节点,于是文中利用非局部神经网络的优势,首次将非局部网络用于运动预测中计算关节点间的相互关系,使得网络在一个时空域中能更好地关注有贡献的关节点,并解决时空图卷积神经网络的接受域有限的问题。通过计算关节点之间的相似度得到时空中全部关节点在一项运动中对于某一关节点的作用,从而降低运动预测的误差。
1.3 GRU模型
GRU(gated recurrent unit)能够解决RNN(recurrent neural network)易出现的长期记忆依赖和反向传播中的梯度消失等问题,较LSTM(long short-term memory)有更少的输入和更简单的网络结构,能够大幅提高训练效率而不降低训练精度[24]。
GRU[25]更适合对长时动作的建模是因为它在RNN 的内部设置了用于信息处理的两个门,分别是重置门(rt)和更新门(zt)。其中重置门(rt)控制候选状态()从上一时刻的状态(ht-1)中得到的信息度;更新门(zt)使用1-zt和zt分别控制当前状态ht从上一时刻状态(ht-1)中需要保留信息的力度和从候选状态()中需要更新信息的度。计算过程如式(1)~式(4)所示:
其中,σ表示sigmoid 激活函数;ht-1表示上一时刻状态;xt表示当前时刻的输入;表示控制候选状态,以建立当前输入xt和上一时刻状态ht-1之间的联系;ht表示隐藏状态。GRU模型的整体结构如图2所示。

图2 GRU模型Fig.2 Model of GRU
2 本文方法
2.1 编-解码网络
提出的人体运动预测多尺度全局自适应注意力图卷积算法(multiscale global adaptive attention graph neural network,MG-GNN)如图3所示,由编码网络和解码网络两部分组成。输入的骨架序列经过编码器准确地提取丰富的运动特征后送入解码器精确地预测骨架未来运动姿势。编码器具体结构如图4所示,由级联的多尺度全局自适应单元块(multiscale global adaptive unit,MGaU)组成。MGaU 由多距离全局自适应注意力时空图卷积特征提取块(multi-distance global adaptive attention spatial temporal graph convolutional feature extraction block,MGST-FEB)和跨尺度融合块(cross-scale fusion block,CS-FB)组成。其中MGST-FEB 采用了本文提出的多距离分区策略和全局自适应注意力时空卷积网络,能够提取更丰富的单一尺度的运动信息,CS-FB将粗细尺度信息进行融合,利用粗尺度对细尺度的指导以及细尺度对粗尺度的补充获得更加精细的运动特征。解码器具体结构如图5所示,采用基于多距离全局自适应注意力图卷积的门控循环单元(MGG-GRU),既利用可训练图增强状态传播,又利用门控循环单元结构使用残差连接增强预测结果。
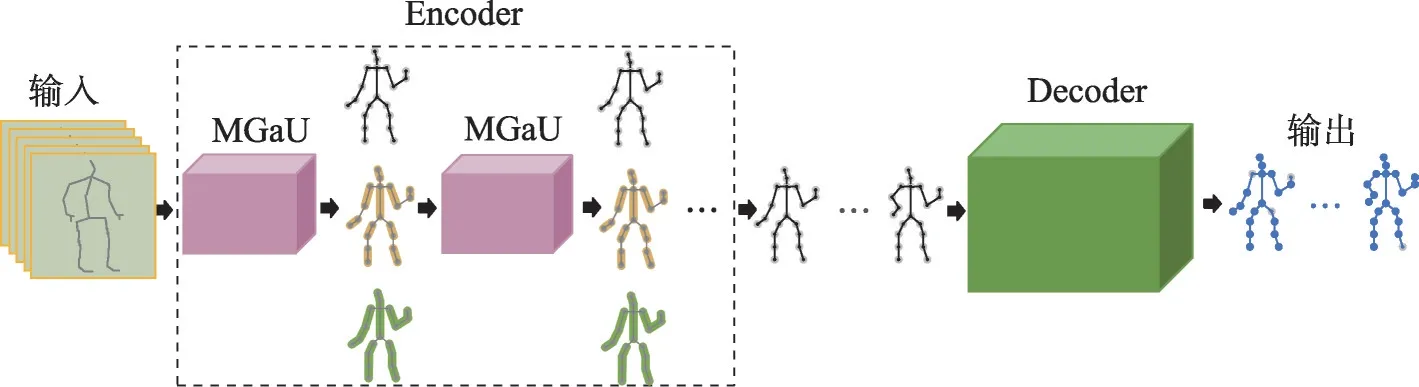
图3 MG-GNN网络的总体框架Fig.3 General framework of MG-GNN
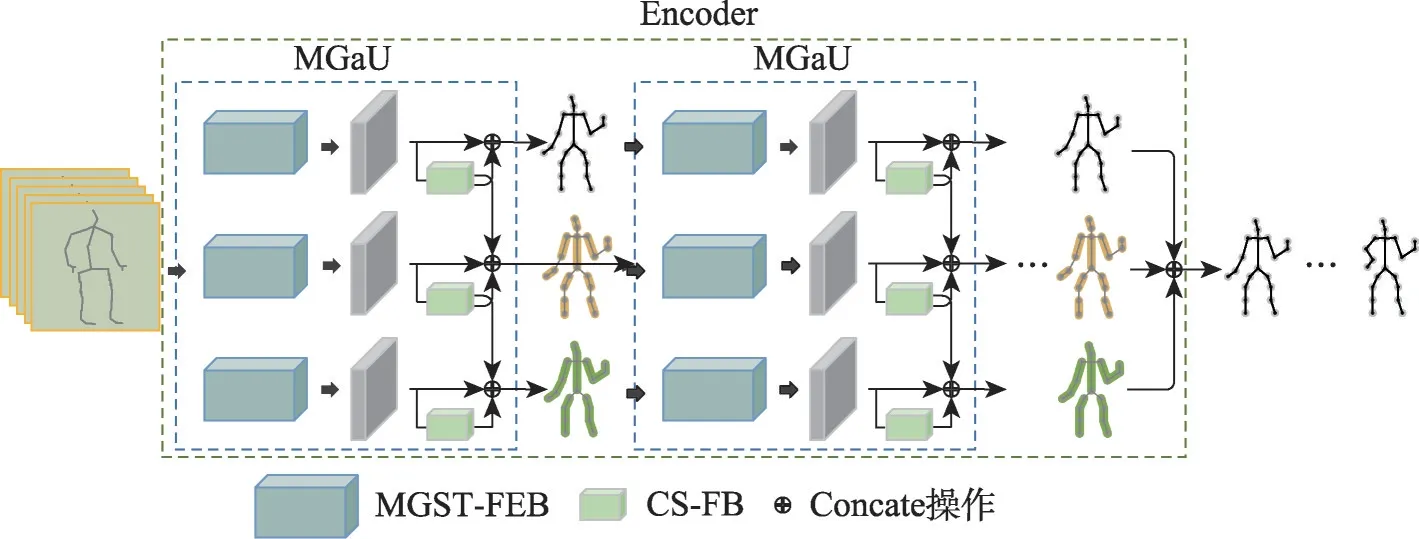
图4 编码器模型Fig.4 Encoder model

图5 解码器模型Fig.5 Decoder model
2.2 多距离全局自适应注意力时空图卷积特征提取块(MGST-FEB)
编码网络由级联的MGaU 块组成,而MGaU 块中包含MGST-FEB 和CS-FB 两个模块,本文提出的MGST-FEB进行了两处改进:多距离分区策略和全局自适应注意力时空卷积图网络。解码网络由MGGGRU 组成,通过G-GRU 采用基于多距离全局自适应注意力图卷积的门控循环单元改进得到MGG-GRU。
2.2.1 多距离分区策略(MD)
原始ST-GCN 网络模型中的图卷积仅仅通过聚合相邻节点间的信息提取骨架关节点信息,且主要使用三种分区策略:单标签、距离分区和空间结构分区提取相邻节点之间的关系。但此三种分区策略仅仅考虑到了相邻关节点之间的关系,每个节点只将自己的信息传播给邻居节点,这会导致节点感受野较小,不利于获取长距离的连接信息。且人体活动时以局部小组为单位移动,故未能考虑到人身体部位内部关节点之间的联系对运动预测的重要性。
ST-GCN 模型在二维卷积的基础上,通过重新定义的采样函数和权重函数即可构造空间上的图卷积公式为:
其中,归一化项Zti(vtj)=|{vtk|lti(vtk)=lti(vtj)}|为相应子集的基数,可平衡不同子集对输出的贡献;vtj是采样函数P;ω′(lti(vtj))是权重函数W。
图的时间信息是采用连续帧之间连接相同的关节点构建的,因此将空间的邻域概念扩展到包含时间连接的关节点的时间域。故采样函数可以定义为:
其中,T为时间邻域的范围,即时间内核的大小。
因为时间轴的有序性,直接修改vti单帧关节点的映射lti(vtj),即可根据vti得出一个时空邻域。故权重函数定义为:
由于观察人体运动例如“踢腿”“打电话”等动作是以人体部件为小组运动的,而ST-GCN 算法中的三种策略的邻域均不能将人体部件关节点包含在里面,故为了充分发挥ST-GCN 网络在时空域上对提取骨架关节点集成信息的重要性,本文提出了多距离分区策略。该策略的邻域能够涵盖人体运动的部件,并且能在单个帧中使用再扩展至空间-时间域,更加完整地提取运动特征,从而提高了每一个节点的感受野,更加差异化地学习不同节点的特征。故文中选取使用D=2的相邻区域B(vti)设置采样函数P,当D大于2 时,节点邻域会超越身体部件,这导致网络提取特征时加入噪声,使得网络性能下降。多距离分区策略将根节点的邻域分成3 个子集(如图6 所示):(1)距离根节点为0的子集(绿色);(2)距离根节点子集为1 的子集(蓝色);(3)距离根节点为2 的子集(黄色)。对每个子集的关节点赋予一种权重。则权重函数可以通过关节点之间的距离定义,每个子集的权重为:

图6 多距离分区策略Fig.6 Multi-distance partition strategy
其中,d为节点到根节点的距离(跨越关节点的个数)。
采用类似于图卷积的表达形式[18],单帧内关节的自连接由单位矩阵I和表示体内连接的相邻矩阵A表示,在单帧情况下可以使用以下公式实现:
对于具有多个子集的分区策略,其中邻接矩阵被拆分成几个矩阵Aj,即在该策略分区中,A0=I和A1+A2+A3=A。
多距离分区策略考虑到人体运动是以局部小组为单位移动,故采样函数P使用D=2 的邻域B(vti),扩大了整个邻域集,通过提取根节点与更远关节点之间的信息,加强身体各部分内部关节点之间的联系,从而提高模型对身体局部的敏感性,进一步降低预测误差。并且本文将多距离分区策略与原STGCN 中的三种分区策略进行了对比,实验结果在3.3.1 小节中,通过实验验证的方法再次证明本文提出的多距离分区策略的优越性。
2.2.2 全局自适应注意力时空图卷积网络(GaSTGCN)
由于ST-GCN 中卷积核感受野的限制,导致模型不能捕获某一关节点和全部关节点之间的时空信息,且不能区分对某一运动有突出贡献的其他关节点,不利于运动特征的提取。由于NLNet[22,26]的全局自适应注意力可以通过计算任意两个关节点之间的交互直接捕捉远程依赖,不局限于邻域,可捕获更多关节点的时空全局信息,并且网络通过相似度的大小给予不同关节点不同的关注度,减少不相关关节点对于网络的干扰。与NLNet 网络不同之处在于(如图7 所示)本文提出的GaST-GCN 在NLNet 网络中采用时空卷积块对网络得到的相关关系进行操作,并且将残差运用到时空卷积操作之后,这样使得编码网络能够提取到时空卷积网络邻域之外的信息,同时不用再增加额外的计算量。自适应是通过每一批次中关节点之间的相对位置的不同而体现。
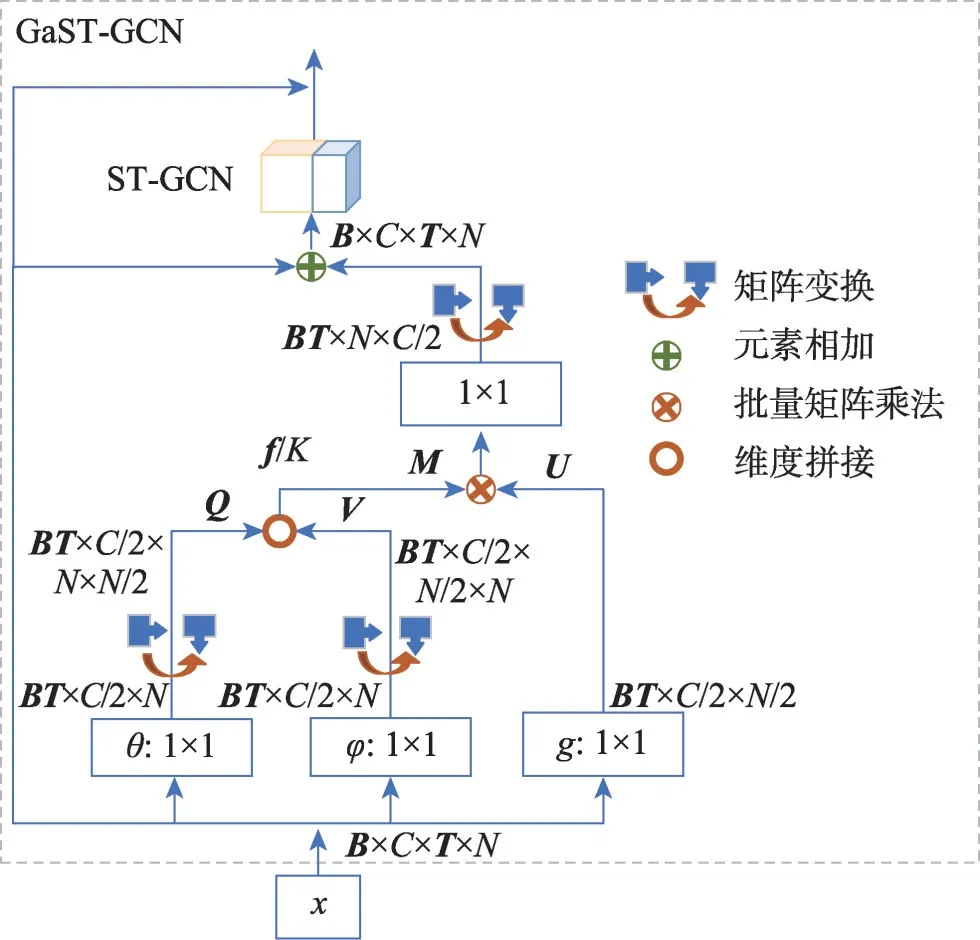
图7 GaST-GCN模型Fig.7 Model of GaST-GCN
GaST-GCN中的非局部关节点注意力可定义为:
2.3 基于多距离全局自适应注意力图卷积的门控循环单元(MGG-GRU)
结合全局自适应注意力的优势并在图卷积中使用多距离分区策略,设一个基于多距离全局自适应注意力图卷积的门控循环单元模型(MGG-GRU)。其结构如图8所示,GRU的隐藏状态是在MGG-GRU指导下学习和更新的。MGG-GRU有两个输入状态,分别是上一时刻的状态ht-1∈RM×d(使用M个关节点和d=3表示时间t的3D 姿势)和基于三位骨架的信息状态SIt∈RM×d,计算过程如式(11)~式(14)。
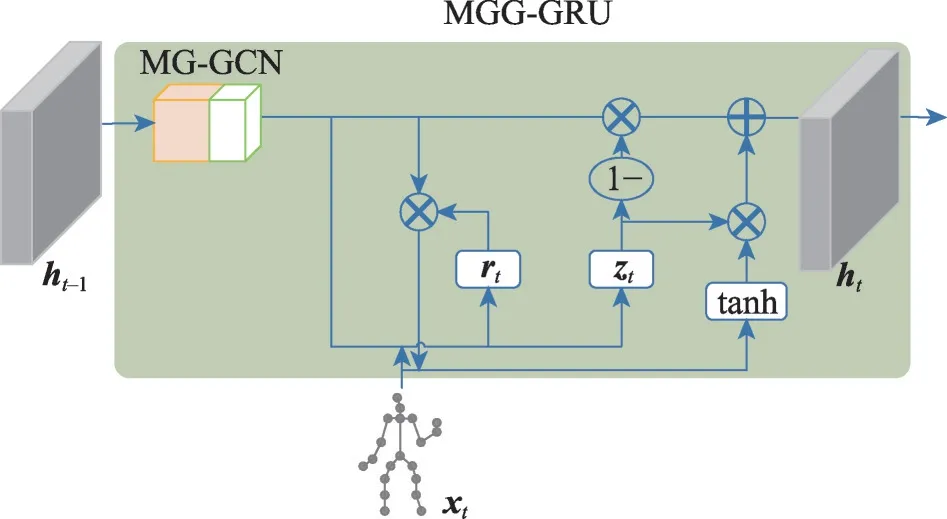
图8 MGG-GRU模型Fig.8 Model of MGG-GRU
其中,AH∈RM×d用骨架图初始化,是内置图的邻接矩阵;rin(·)、rhid(·)、zin(·)、zhid(·)、hin(·)、hhid(·)是可训练线性映射;WH是可训练权重。
3 实验结果与讨论
采用PyTorch-1.8.0 深度学习框架,编程语言为Python_3.8,在Windows 操作系统下实现,GPU 为ATX-4000,CUDA版本为11.2。
3.1 实验数据集和评价指标
Human 3.6M(H3.6M)数据集包含7名受试者,每个受试者执行15 种不同的动作。每个人有32 个关节点,将关节点位置通过指数图转换为坐标图,只使用非零关节点,并沿时间轴对所有序列进行两次下采样。选取S1、S6、S7、S8、S9、S11共6名受试者为训练集,选取S5为测试集。
CMU Mocap(CMU)数据集是由情景&场景、人类互动、运动、与环境的互动、体育活动&运动5 个主要动作类别构成的常用的人体姿势预测数据集。通过非零指数图给每个受试者保留26个关节点。由于所提算法没有使用“人机交互”类别的数据,并且需要为每个行为提供足够的数据来训练模型,排除了包含少于6个试验的行为类别。故从“通信手势和信号”类别中选择交通方向和篮球信号,从“运动”类别中选择跑步、步行和跳跃,从“常见行为和表达”类别中选择清洗窗户,从“体育活动&运动”类别中选择篮球和足球,共8个动作类别。对数据集的处理方式和评估方法都和H3.6M相同。
3DPW 数据集[27]由超过510 000 帧的三维姿势组成的大型数据集,用于挑战性的室内和室外活动。本文采用官方设置的训练集和测试集。
评价指标采用与基线算法相同的角空间中产生的运动和地面真实值之间的平均角误差(mean angular error,MAE)定量评估各种方法之间的性能。通过本文算法与当前流行的算法进行比较,展示本文算法的性能,同时通过组合各个模块比较,以展示所提算法的有效性。
Kinetics-skeleton 数据集是建立在大规模动作识别数据集Kinetics(Kinetics 人类动作数据集)上的。Kinetics是最大的无约束动作识别数据集,包含约30万个从YouTube 检索的视频片段。这些视频涵盖了多达400个人类动作,从日常活动和体育场景到复杂的互动动作,视频中的每个片段都持续了大约10 s。Yan 等人通过在Kinetics 数据集上使用OpenPose 获得每帧上18 个骨骼点的二维坐标(X,Y)和置信度分数C,并保留每帧内平均置信度最高的2个人的关节,并为每个动作选择300帧作为动作骨骼序列,从而建立了Kinetics 骨骼数据集。该数据集提供了一个由24 万个片段组成的训练集和一个由2 万个片段组成的验证集。为了便于比较,本文在训练集上训练了模型,并在验证集上验证了模型的性能。文中使用Top-1和Top-5的准确度指标进行验证。
3.2 实验结果分析
为了验证MG-GNN 模型的性能,在H3.6M 数据集、3DPW 数据集和CMU 数据集上进行模型的训练和测试,采用与早期研究[6]相同的子序列进行评估,并采用与DMGNN 算法相同的优化器和损失函数。总迭代次数为4万次,学习率为0.000 05,批次大小设置为32。
3.2.1 在H3.6M数据集上的实验结果
短期运动预测(预测500 ms 以内的未来姿势):将本文算法MG-GNN与其他算法在H3.6M数据集上预测400 ms运动的结果进行比较。结果如表1和表2所示。首先可以看出在H3.6M 数据集上的所有动作的短期运动预测误差均值在160 ms、320 ms、400 ms均好于其他算法,且在H3.6M 数据集的4类代表性动作“散步”“进食”“吸烟”“讨论”上的运动误差均值如图9 所示,这4 类代表性动作的预测结果可视化如图10 所示;其次从表1 中可以看出:MG-GNN 与基线DMGNN相比,由于使用的多距离分区策略丰富了网络对于身体各部分关节点之间的信息的提取,使得MG-GNN 除了与基线相同的在局部周期性行为“进食”“吸烟”方面的预测良好之外,在“散步”上也获得了很低的MAE;最后由于加入全局自适应注意力,有效提取了对某一项运动有贡献的时空中的其他关节点信息,使得MG-GNN 在非周期性的行为“讨论”上取得了较原算法更精确的预测。
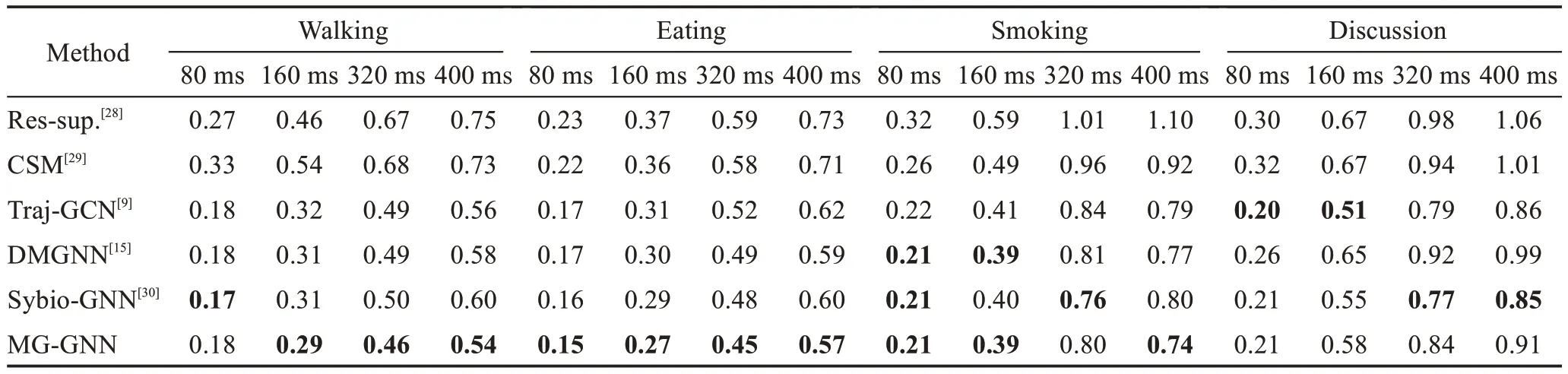
表1 不同方法在H3.6M数据集上短期运动预测的MAE比较Table 1 MAE comparison of short-term motion prediction on H3.6M dataset by different methods
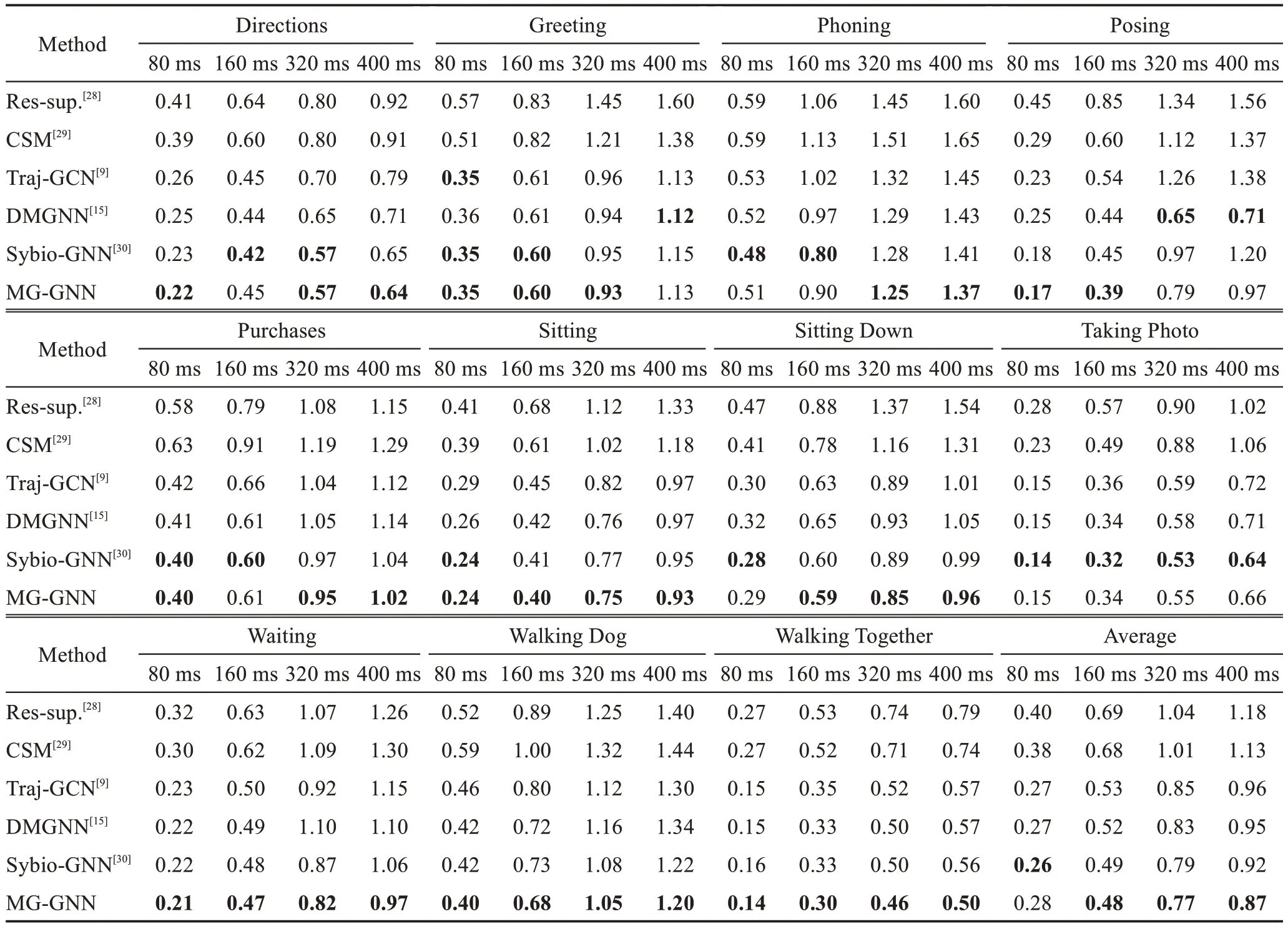
表2 不同方法在H3.6M数据集的其他11个动作类上的短期运动预测的MAE比较Table 2 MAE comparison of short-term motion prediction on other 11 action classes of H3.6M dataset by different methods
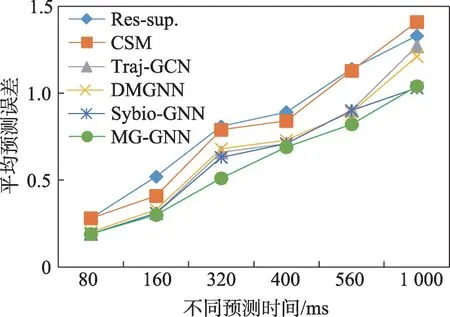
图9 H3.6M数据集上不同模型的平均角度误差Fig.9 Mean angular error of different models on H3.6M dataset
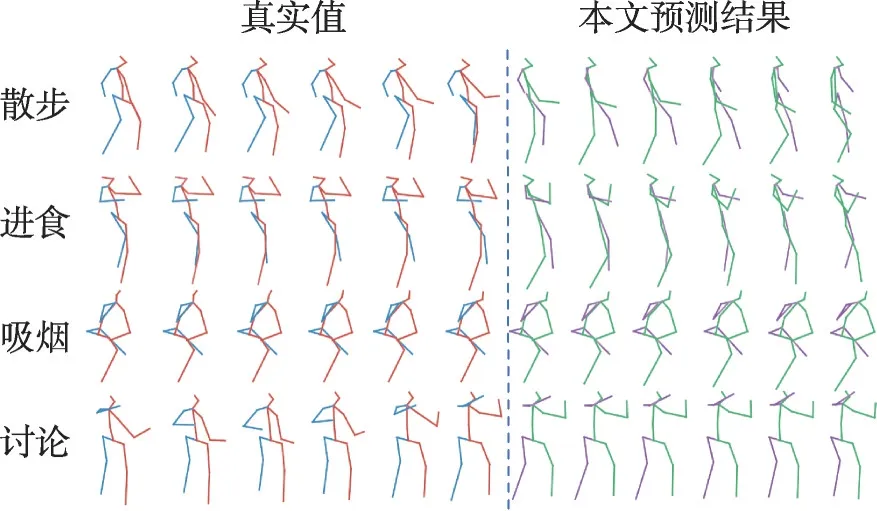
图10 H3.6M数据集的4类代表性动作的短期预测可视化结果Fig.10 Short-term prediction qualitative results of 4 representative actions on H3.6M dataset
但是结果与其他算法相比仍不够精确,由于此模型对于非周期性运动的预测需要在更长时间序列上得出较为精确的预测,表3 证实了这一想法。表2给出了MG-GNN与一些具有代表性的方法和最新的方法在H3.6M 数据集中剩余的11 类动作的比较,结果表明MG-GNN在大多数动作类中能够达到较精确的预测,而在“讨论”“购买”“拍照”短期动作上表现不尽如人意。原因在于这些非周期动作,在时间轴上的变化大,基线网络和本文新提出的网络中都没有在时序方面的增强机制,导致在这些动作上表现较差。
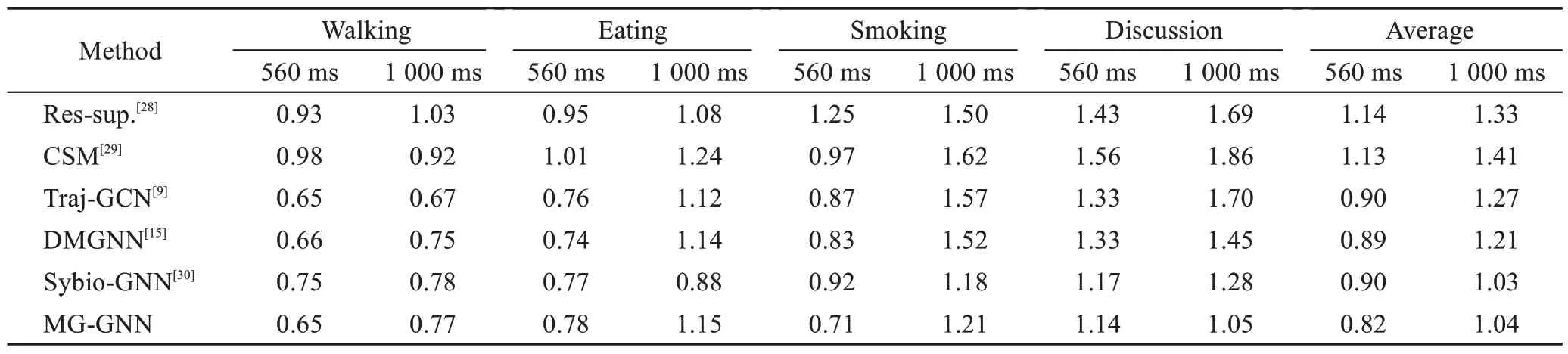
表3 不同方法在H3.6M数据集上长期运动预测的MAE比较Table 3 MAE comparison of long-term motion prediction of H3.6M dataset by different methods
长期运动预测(超过500 ms 的未来姿势):由于动作变化和非线性,长期运动预测具有很大的挑战性。表3 显示了本文算法与其他算法在H3.6M 数据集中具有代表性的4 类动作上560 ms 和1 000 ms 的预测结果。从结果首先可以看出长期运动预测在560 ms的误差均值比其他方法都好,在1 000 ms的误差均值也好于原始算法,但是在短期运动预测的好的结果并没有在长期运动预测中延续,MG-GNN 和DMGNN 在1 000 ms时的“散步”表现均不理想,这是由于在跨尺度融合块中并未使用有利于长时依赖的时间注意力机制而导致的。其次在“讨论”上的长期运动预测表现比短期运动预测的结果好,这一结果说明对于非周期性运动的预测在较长时间中会获得更好的结果。
3.2.2 在CMU数据集上的实验结果
在CMU 数据集中挑选的8类动作上进行了短期和长期运动预测,并与其他算法进行了比较,结果如表4 所示。与不同运动预测模型在不同预测时间的所有运动的平均预测误差趋势如图11 所示。从结果首先可以看到,MG-GNN 的长短期运动预测误差均值在160 ms、320 ms、400 ms、1 000 ms 均好于其他算法;其次可以看出MG-GNN 在除了“跳跃”以外的动作类上都取得了良好的结果;最后可以看出在“跳跃”上MG-GNN 算法与原始算法相比预测误差都有所下降,但是两者均差于Traj-GCN[9]方法。是由于人体在跳跃的时候,在时空中的变化幅度较大,关节点重叠率较高,此时对于模型提取关节点的长时动作依赖要求更高。MG-GNN 算法只在提取运动特征的模块中嵌入了全局自适应注意力,较难胜任在时空中变化幅度较大的动作预测。
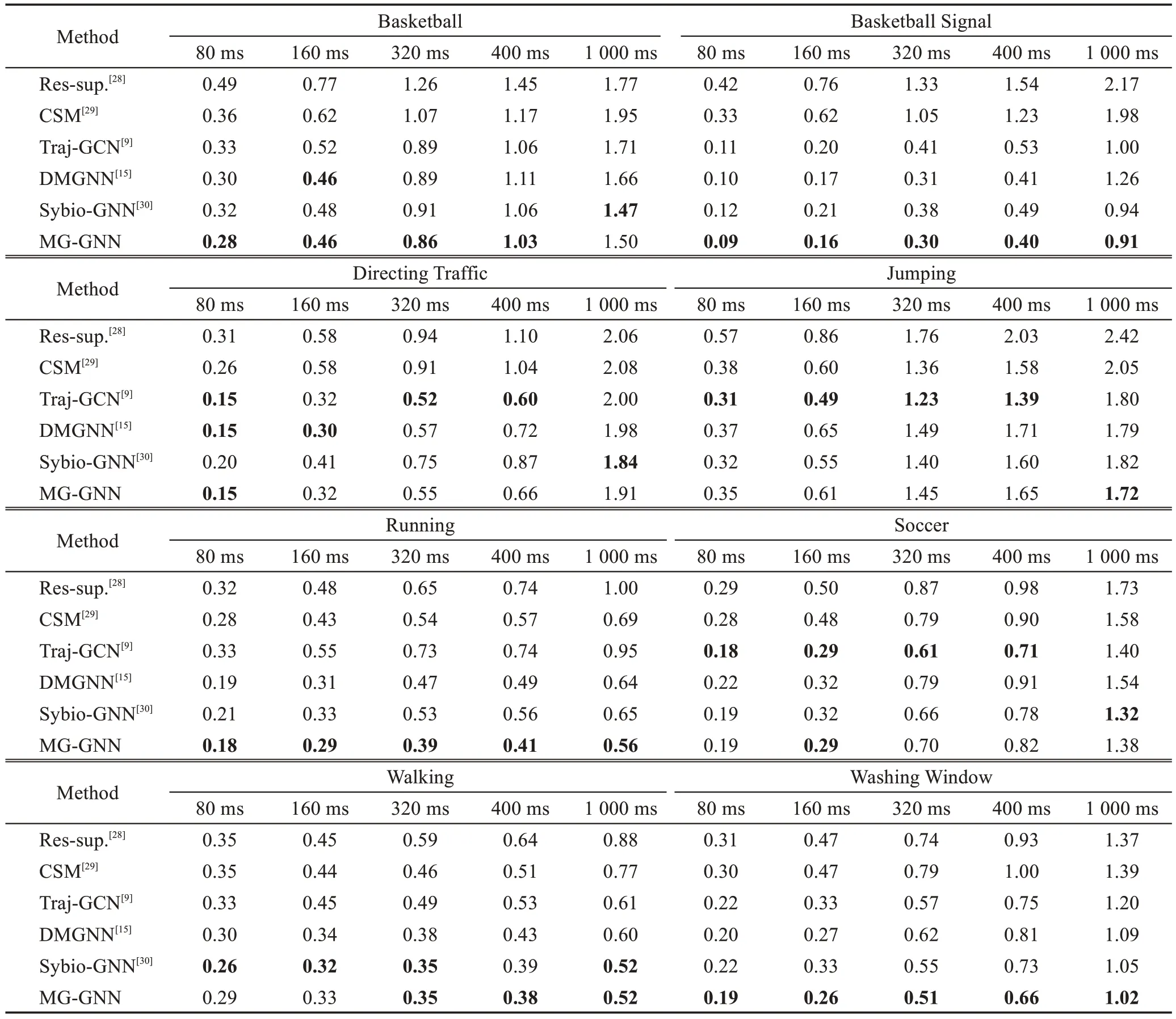
表4 不同方法在CMU数据集上的短期和长期运动预测的MAE比较Table 4 MAE comparison of short-term and long-term motion prediction of CMU dataset by different methods
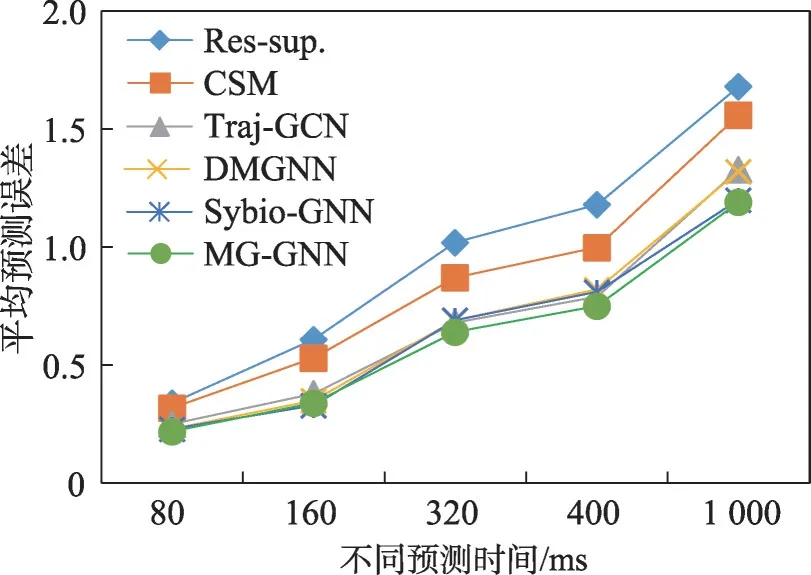
图11 CMU数据集上的不同模型的平均预测误差Fig.11 Average prediction errors of different models on CMU dataset
3.2.3 在3DPW数据集上的实验结果
为了验证本文方法,在3DPW数据集上对于短期和长期运动预测的平均MAE 如表5 所示,本文所提模型在短期和长期运动预测的平均MAE均好于其他模型再次证明模型的鲁棒性。
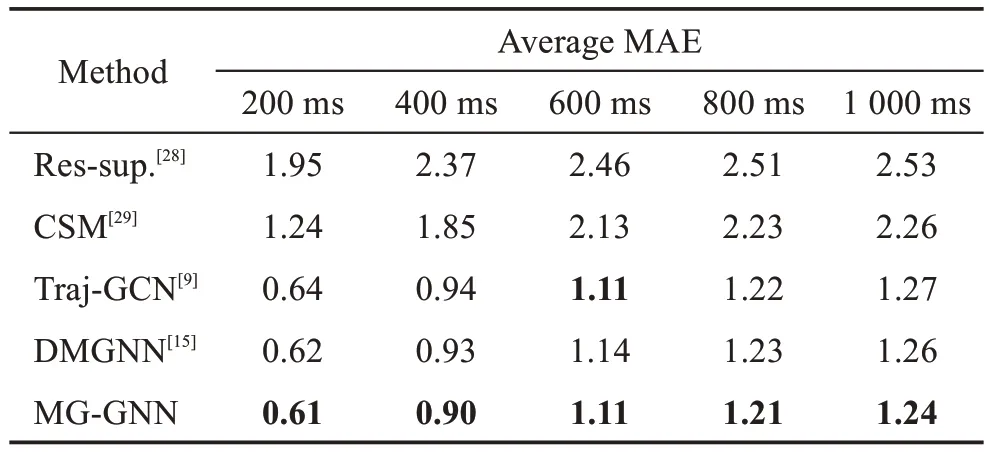
表5 不同方法在3DPW数据集上的短期和长期运动预测的平均MAE比较Table 5 Average MAE comparison of short-term and long-term motion prediction of 3DPW dataset by different methods
3.3 消融实验
3.3.1 在Kinetics-skeleton数据集上的消融实验
由于本文中的MD 策略和GaST-GCN 模块是对动作识别网络ST-GCN 的改进部分,为了验证改进的效果,本文在Kinetics-skeleton 这个动作识别的常用数据集上进行了实验。多距离分区策略模型与其他模型在Kinetics-skeleton数据集上的性能比较见表6。从表中的数据来看,与ST-GCN[18]相比,MD 的Top-1和Top-5 分别提高了1.47 个百分点和2.01 个百分点。与原算法中使用的距离分区策略相比,Top-1 和Top-5分别提高了3.07个百分点和3.51个百分点。

表6 不同分区策略与ST-GCN模型的准确性比较Table 6 Accuracy comparison of different partition strategies with ST-GCN model 单位:%
在动作识别数据集Kinetics-skeleton 上将全局自适应注意力运用到ST-GCN 模型的时空块的结果如图12所示。当采用1到2个全局自适应注意力层时,Top-1 和Top-5 上升;当采用3 到9 个全局自适应注意力层时,Top-1 和Top-5 下降。故采用0 或1 个全局自适应注意力时融合不充分,而更多的全局自适应注意力层往往会融合多余的信息,使模型混乱。因此,在运动预测模型中,本文也使用了两层的全局自适应注意力。
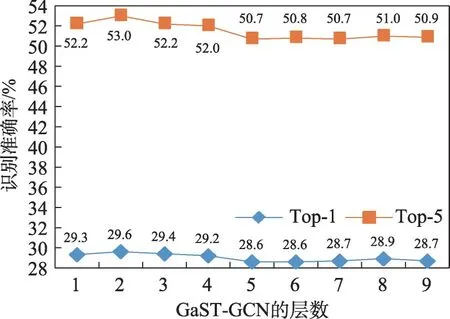
图12 不同GaST-GCN层数在Kinetics-skeleton数据集上的精度比较Fig.12 Accuracy comparison of different layers of GaST-GCN on Kinetics-skeleton dataset
3.3.2 在H3.6M数据集上的消融实验
为了验证本文设计的多距离分区策略和全局自适应注意力在DMGNN 算法上的有效性,在H3.6M数据集的4类代表性动作上进行短期预测和长期预测。
实验结果如表7所示,在仅使用多距离分区策略后,DMGNN提取人体关节点特征时考虑身体部位中的关节点之间的联系,从结果来看,在H3.6M 数据集的4 类代表性动作上的长短期预测结果略好于原算法;在仅使用全局自适应注意力后,DMGNN 在提取人体关节点时考虑了全部有关的时空中的关节点信息,在H3.6M 数据集的4类代表性动作上的长短期预测结果略好于原算法;仅使用改进的解码网络后,由于加强了动作状态的传播性能,改进后的解码器对于运动预测的结果略好于原算法;从表7中的模块组合实验结果可以看出当3个模块同时添加时,增强了身体部位内部关节点间的信息以及与动作有关的全部时空中的关节点某信息,证实了所提算法的有效性。

表7 加入不同模块网络的效果Table 7 Effect of network when adding different modules
4 结束语
为实现准确、鲁棒的人体运动预测,提出了一种多尺度全局自适应图神经网络的人体运动预测算法。设计了一种多距离分区策略,可帮助网络更好地提取身体关节点各部分关节点之间的联系信息,以增强特征中的运动信息。在ST-GCN 的时空块中嵌入全局自适应注意力,提取对某一运动贡献度高的全局关节点信息,突破ST-GCN 算法感受野的局限性。实验表明,所提的网络模型优于当前运动预测性能较好的算法模型。本文算法的预测速度和预测精度在短期预测“讨论”“跳跃”和长期预测“散步”上仍有待提高,拟在多尺度融合块中加入时间自适应模块,高效灵活地捕捉非周期性运动和长期预测的时间关联性;拟在解码网络的GRU 中加入软注意力机制,通过选择性地忽略部分信息来对其余信息进行重加权聚合计算,提高网络对非周期性运动和长期运动的预测能力。同时收集更多运动预测的数据集,以便进行更全面的训练和预测,进一步提高算法的预测效果。
猜你喜欢
数学物理学报(2022年4期)2022-08-22
数学物理学报(2022年2期)2022-04-26
科学技术创新(2021年19期)2021-07-16
沈阳航空航天大学学报(2020年6期)2021-01-27
数学年刊A辑(中文版)(2020年2期)2020-07-25
数学物理学报(2019年6期)2020-01-13
金桥(2018年4期)2018-09-26
数学物理学报(2017年5期)2017-11-23
军营文化天地(2017年6期)2017-06-28
智能系统学报(2017年1期)2017-06-01