基于AFS和DYC协调控制的智能车辆稳定性研究
2023-12-05 13:04刘畅
汽车文摘 2023年12期
刘畅
(重庆交通大学机电与车辆学院,重庆 400000)
0 引言
智能车辆稳定性控制是目前研究运动控制的核心内容,即在受到模型参数摄动和不确定外界干扰作用下,车辆横、纵向稳定性都受到影响,或将引起失稳。这要求汽车保证附加横摆力矩、横摆角速度和质心侧偏角得到相应控制,以提高鲁棒性[1]。因此,对稳定性控制的研究中,干扰因素的主动控制是技术难点之一。
近年来,国内外学者对轨迹跟踪主动控制进行了大量研究,并取得了丰硕的研究成果。主要的控制方法有模型预测控制、自抗扰控制、滑模控制、模糊控制、自适应控制、比例—积分—微分控制(Proportional-Integral-Differential,PID)。李一染等[2]考虑了车辆行驶过程中不确定扰动,基于自抗扰控制算法设计了主动前轮转向(Active Front Steering,AFS)控制器。结果显示,与PID 控制相比,自抗扰控制对干扰抑制效果更好。余卓平等[3]考虑路面行驶车速、附着条件变化和侧向风等干扰因素,基于鲁棒控制设计了AFS控制器,并在蛇形路况下进行了仿真验证。结果表明,H∞鲁棒控制器能提高车辆的抗干扰性和行驶稳定性。Diao 等[4]考虑到外部干扰,分别将PID 控制、终端滑模(Terminal Sliding Mode,TSM)控制与扰动观测器产生的前馈补偿项相结合,以提高AFS 系统性能,开发了复合控制方案。仿真结果表明,2种复合控制器的性能均优于单一控制器的性能。Farazandeh 等[5]为避免轮胎在主动转向时进入饱和区,设计了一种主动独立前轮转向控制器,通过内侧转向轮上不均匀分布的转向修正提高操纵稳定性,最大限度地利用内外轮可用附着力,同时消除轮胎饱和的可能性。
上述研究大多针对结构化道路下智能汽车的轨迹跟踪控制,较少考虑车辆模型参数的不确定性和随机干扰下的车辆稳定性,难以满足复杂路况下智能汽车轨迹跟踪的抗干扰性和鲁棒性要求。针对以上问题,提出AFS 和DYC 协调控制策略,增强车辆保持稳定行驶的能力;设计基于鲁棒自适应滑模控制的主动前轮转向控制器,实时修正控制器的输出,解决参数时变以及不确定性干扰影响的问题;基于模糊控制设计了附加横摆力矩控制器。协同控制仿真结果表明,该方法可以提高系统鲁棒性和车辆行驶稳定性。
1 非线性二自由度车辆模型建立
使用非线性二自由度模型描述车辆横向运动和横摆运动[6],假定车辆纵向速度恒定,并忽略轮胎纵向力和空气阻力的影响,如图1所示。通过车辆运动分析,横向和横摆运动如式(1):

图1 二自由度汽车动力学模型
式中,m为整车质量;vy为车辆横向速度;β为车辆质心侧偏角;β为质心角速度;ωr为车辆横摆角速度;Fyf、Fyr分别为前后轮的侧向力;δf为主动前轮转向控制器作用在前轮的转角;Iz为车辆绕z轴转动的转动惯量;a为车辆质心到前轴的距离;b为车辆质心到后轴的距离。
车辆有建模和参数不确定性误差,用Δ来代表总的不确定因素,将式(1)改写为:
式中,ωr' 为车辆的直接横摆力矩,在车辆不足转向和过度转向时进行相应的力矩补偿,保证车辆行驶稳定性。
考虑车辆在极限条件下,横摆角速度与质心侧偏角参考值应表示为:
式中,ωd为理想横摆角速度;βd为理想的质心侧偏角;vx为车辆的纵向速度;L为轴距;稳定因素),其中,Kf为前轮的稳定性因素,Kr为后轮的稳定性因素;μ为路面附着系数。
轮胎的横向力采用“魔术公式”轮胎非线性动力学模型,轮胎横向力与轮胎侧偏角及垂向载荷之间的对应关系,其表达式为:
式中,Y是纵向力或者侧向力;n是纵向滑移率;D是峰值系数;B为轮胎刚幅度因子;C是曲线形状因子;E为曲率因子。
前后轮的垂向载荷:
式中,Fzf为车轮前轮垂向载荷;Fzr为车辆后轮垂向载荷。
轮胎横向力的非线性特性曲线如图2所示。在相同垂向载荷下,轮胎线性区域的横向力特性不受附着系数影响。

图2 轮胎横向力非线性特性
2 AFS和DYC协同控制研究
2.1 协同控制策略
AFS 是通过施加前轮转角改善车辆操纵稳定性,但在低附着路面上车辆容易失稳[7]。直接横摆力矩能产生附加横摆力矩,提升车辆在低附着路面上的行驶稳定性,但该控制方法对纵向车速影响大,因此采用AFS和DYC协同控制的策略[8]。
车辆状态未出现失稳时,采用主动前轮转向控制,车辆处于或即将处于失稳状态时,采用主动前轮转向和直接横摆力矩控制。引入稳定性判断S来分析,S的定义如下:
式中,S=0 时车辆稳定;S=1 时车辆超出稳定边界,出现失稳现象;d1,d2,d3,d4为车辆状态点到菱形稳定域4 边的距离;DAB,DBC为菱形2 条平行线间的距离。当车辆未失稳时,采用AFS 控制,当车辆处于或即将处于失稳状态时(S>0),采用AFS 和DYC 协同控制。AFS和DYC协调控制策略如图3所示。

图3 AFS和DYC协调控制策略
2.2 基于自适应滑模控制的AFS控制器设计
车辆运动过程中,外界的随机干扰和模型参数的不确定性都会影响被控对象,侧偏刚度受到垂直载荷、路面条件、轮胎气压影响[9]。设计抗干扰的控制器,可以提高系统鲁棒性。
传统的滑模控制器设计是将车辆行驶过程中各种不确定性的干扰因素(设为Δ)引入横摆角速度的状态空间表达式[10],但由于不确定项Δ不能精确量化,在控制时会产生较大抖振。为了合理控制模型摄动,考虑车辆质心位置变化、质量和轮胎侧偏刚度变化等因素设计基于鲁棒自适应滑模控制主动前轮转向控制器,将自适应控制与滑模控制相结合,实时修正输出结果[11],抵消多源扰动影响,可以提升非线性系统的鲁棒性。控制流程如图4所示。

图4 自适应滑模控制流程
图4中,q-是干扰估计值;e是误差;C是外界扰动;s是滑模面;q是干扰观测值。
鲁棒自适应滑模控制器可随着车辆变化实时修正控制器的输出,解决参数时变和随机干扰的问题[12]。横摆角速度的状态空间方程如下:
式中,δs为转向盘作用在滑模前轮的转角;Iz为车辆绕z轴转动的转动惯量。
滑模面s是车辆横摆角速度的实际值与理想值偏差[13],即s=ωr-ωd,将作差后的式子进行求导变化后,等式两边同时乘以c1,计算公式如下。
式中,对滑模面s求导得出s为滑模趋近率;c1,c2,c3为扰动的实际值。
滑模趋近率选择等速趋近率:
式中,ε和k为指数趋近律参数,ε>0,k>0。k值决定趋近速度,ε表示滑模控制的抖振程度,因此在设计时适当增大k值并减小ε值有利于改善滑模控制的品质,模型中参数k=30,ε=0.000 1,在加快趋近速度的同时减小抖振。设计的控制律如下:
式中,Δ1,Δ2,Δ3为模型误差包含未建模误差,这里c1,c2,c3为干扰估计值,包含了模型的不确定因素;c1,c2,c3是干扰实际值。
设计李雅普诺夫(Lyapunov)函数:
式中,V为正定标量函数,作为广义能量函数,判断系统的稳定性;k1,k2,k3为控制增益。
为保证系统的渐近稳定性(V<0),即下式:
可以得到自适应率c1c2c3如式(13)所示:
式中,取k1=k2=k3=50。
可以得到Lyapunov函数的导数为:
由V<0 可知车辆渐近稳定,滑动变量将在有限时间收敛到0。
2.3 基于遗传优化模糊控制的直接横摆力矩设计
前轮转角控制主要用于调整车辆的方向,但在高速行驶或紧急避险的情况下,不能保持车辆的行驶稳定性,因此需要增加直接横摆力矩控制,改变车辆横向动力学特性和车辆悬挂特性,提供更好的操作性和稳定性,以应对特殊道路条件或恶劣天气情况的影响。设计基于模糊控制的直接横摆力矩控制器,将其与遗传优化算法相结合。
遗传算法是将生物进化论中“适者生存,劣者淘汰”原则[14]应用到控制系统中,步骤是进行初始化群体,随机生产初始控制器,对个体进行适应度评估,选择优秀的个体进行信息的组合,再形成新一代个体,反复迭代的过程不断优化输出结果。遗传算法流程如图5。

图5 遗传算法流程
通过全局最优搜索,找到模糊控制系统的最优变量。对种群规模N、交叉概率Px、变异概率Pe参数进行初始化。取N=40,Px=0.8,Pe=0.005,遗传算法的迭代终止数为100。
模糊控制器的输入和输出语言变量选用trimf 隶属度函数(Triangular membership function,trimf),三角形成员函数[15]。eω为车辆的横摆角速度与理论值的偏差,一般为[-0.12 rad,0.12 rad];eβ为质心侧偏角与理论值的偏差,一般为[-0.105 rad,0.105 rad];Ke1,Ke2为量化因子;Ku为比例因子;模糊逻辑规则中表示隶属度关系,NB表示负大、NM是负中、NS是负小、PB是正大、PM 是正中、PS 是正小。横摆角速度误差E(ωr)隶属度函数如图6所示。
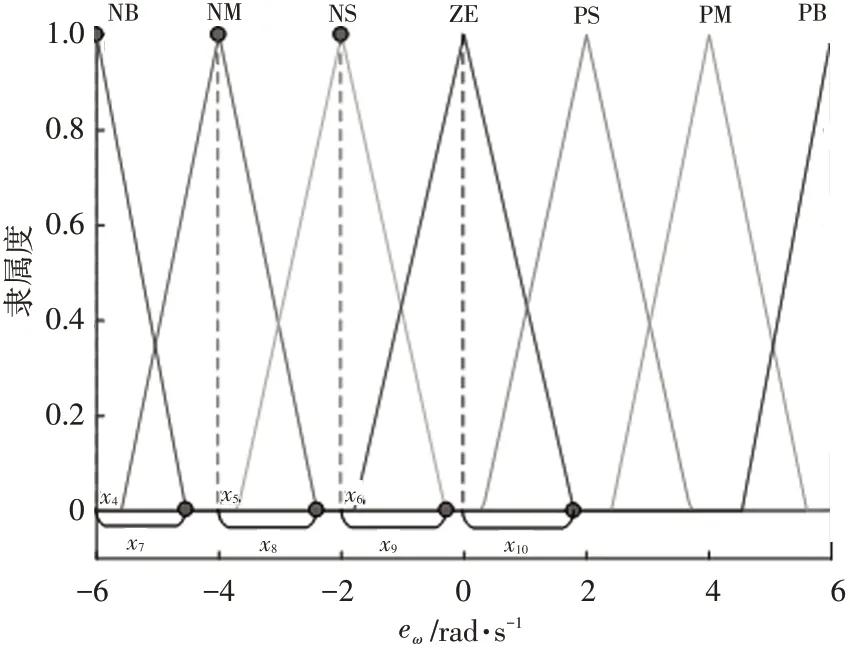
图6 横摆角速度误差偏差eω 隶属度函数
取三角隶属函数顶点横坐标x4,x5,x6,与斜边和横坐标交点到中心点的距离x7,x8,x9,x10,通过这7个点来表示模糊控制的输入或输出域。考虑量化因子和比例因子、输入输出论域变量以及对应的模糊规则,确定待优化求解的自变量为73个。
设计适应度函数J,在优化求解中要使得其最小:
进行遗传操作时,交叉将精英数(Elite count)取5,后代比例为0.8,产生的个体数为0.8×(N-Elite count),“交叉”函数选用轮盘赌函数(Roulette),“变异”函数选用高斯函数(Gaussian)。
对遗传控制进行参数设置,种群规模N,代表进入遗传算法个体的数量,取N=40、交叉概论Px,指在被选中进入下一代个体基因交换产生新的个体的概率,取Px=0.8、变异概率Pe,指在进入下一代种群中的个体发生较小的随机变化,取Pe=0.005,决定遗传算法运行终止的迭代终止数为100。遗传算法迭代次数增加,适应度函数值逐渐减小。优化后的量化因子Ke1=-127.64,Ke2=-107.68,比例因子Ku=-5 625.41。经过遗传算法优化后得到的模糊控制器隶属度函数曲线如图7和图8。

图7 质心侧偏角误差变化率隶属度函数

图8 直接横摆力矩隶属度函数
通过遗传算法优化后,适应度函数值J 由54.049 1 变化到5.812 7,减小了89.25%,模糊控制器大幅度提高了控制精度以及车辆在随机干扰下的行驶稳定性。
2.4 附加横摆力矩分配策略
通过直接横摆力矩控制器,可以求解出保证车辆稳定性的附加横摆力矩[16],考虑路面轮胎的附着极限和期望的附加横摆力矩,利用二次规划算法实现4个车轮最优转矩分配。
设计目标函数时,考虑到电机只能输出轮胎纵向力,将其转换为纵向力矩,路面提供最大路面附着力矩,再引入车轮滚动半径,得到附加横摆力矩的目标函数如下:
式中,Txij为地面提供的最大附着力矩;R为车轮滚动半径;Tzij为轮胎受到的纵向力矩。
设计多个约束条件,包括驱动力约束、轮胎力矩约束、轮胎横摆力矩约束、路面的最大附着力约束以及电机约束条件。为解决多个约束条件下的优化问题,提出用二次规划的算法,进行最优化求解,完成每个车轮转矩的最优分配,采用形式如下:
式中,H,A,Aeq代表矩阵,为f,b,beq,lb,ub,x 向量。
在MATLAB中编写Quadprog函数的Options参数,利用有效集算法,可以实时优化结果输出给4个车轮,通过不同车轮间力矩差实现车辆的附加横摆力矩。
3 稳定性控制仿真分析
车辆行驶中会受到外界干扰(如侧向风、路面附着系数变化)和由模型参数变化引起的内部扰动,影响车辆的跟踪精度和行驶稳定性[17]。车辆实际行驶中,扰动通常是混合出现的,因此在阶跃扰动、正弦扰动及混合扰动3种不同工况下对混合扰动继续进行仿真分析,根据协调控制策略的稳定性判据S对不同工况进行分析。
采用双移线仿真工况,其参数如表1所示,标准车道如图9所示。

表1 双移线车道参数m

图9 双移线工况车道示意
3.1 阶跃扰动仿真试验
利用阶跃扰动模拟车辆行驶中受到的纵向力或者横向力影响,使得车辆受到绕z轴转动的扰动力矩,在仿真时间t=3 s 时加入1 000 N·m 的阶跃扰动下横摆力矩Δω'r,车速设为90 km/h,在双移线工况下得到仿真结果如图10、图11、图12 所示。加入阶跃扰动后,由图10 可以看出车辆在第3 s,车辆横摆力矩增加了1 000 N·m,通过计算稳定性判据S,得知需要将附加横摆力矩和主动转向控制相结合,提高车辆稳定性。图中协同控制后,附加横摆力矩峰值下降66.87%。由图11 可知,采用AFS 和DYC 协调控制后,跟踪精度提高,更接近车辆的理想横摆角速度[13]。如图12 所示,协同控制的质心侧偏角控制范围更小,说明相比于横摆角速度单独控制,车辆控制在行驶稳定域内,设计的控制器抗干扰能力更强。

图10 阶跃扰动下的直接横摆力矩

图11 阶跃扰动下的横摆角速度
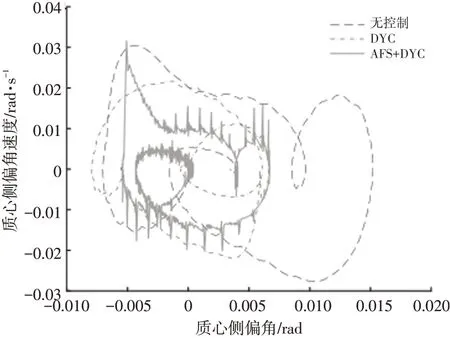
图12 阶跃扰动下的质心侧偏角速度
3.2 正弦扰动仿真试验
利用正弦扰动模拟车辆行驶中受到交变力矩,在仿真中加入正弦扰动下横摆力矩Δω'r=1 000 sin 0.5πt,车速设为90 km/h,在双移线工况下得到仿真结果如图13、图14、图15所示。

图13 正弦扰动下直接横摆力矩

图14 正弦扰动下的横摆角速度

图15 正弦扰动下的质心侧偏角速度
如图13 可知,加入正弦扰动后,随着正弦力矩增大,车辆稳定性降低,车辆需要的附加横摆力矩增大,因此需要引入AFS 控制。由图14 可知,相较于DYC单独控制,AFS和DYC协同控制策略可以更好地跟踪车辆理想值,同时控制效果更好。
如图15所示,协同控制下质心侧偏角的变化域相对更小,表明所设计的控制器有较好的干扰抑制能力,可以提升车辆的稳定性。
3.3 混合扰动仿真试验
车辆行驶的环境复杂,过程中任意状态量改变都将影响其控制性能。现实生活车辆会同时受到多种干扰因素的影响,包括噪声、延时、未建模误差以及随机未知干扰的作用。利用混合扰动来模拟车辆所受到的干扰,通过添加随机因子即Gaussian分布的随机信号,仿真时将其上下界均设置为1 000 N·m,采样频率设为0.01 s。
如图16 可知,混合扰动下协同控制减小控制器输出的附加横摆力矩,利于降低驱动电机的输出扭矩。由图17 可以看出AFS 和DYC 协同控制下车辆横摆角速度得到明显改善。如图18 所示,只在DYC控制下质心侧偏角最大值为-0.008 1 rad,但协同控制下质心侧偏角最大值是-0.005 6 rad,提升了系统的稳定性。

图16 混合扰动下的附加横摆力矩变化

图17 混合扰动下的横摆角速度

图18 混合扰动下的质心侧偏角速度
4 结论
针对分布式驱动电动汽车容易受到模型参数的摄动和外界干扰且在随机干扰下行驶稳定性差的问题,设计抗干扰的控制器,分析干扰因素对车辆稳定性的影响,将干扰作为扰动加入到动力学模型中,排除干扰的影响,实现干扰抑制的作用。
设计AFS 和DYC 的协调控制,一方面基于自适应滑模的主动前轮转向控制器,将自适应率和滑模控制相结合,通过自适应律可以调整滑模面的参数,以适应系统模型的不确定性和外部扰动的影响。另一方面基于模糊控制的附加横摆力矩控制器,以横摆角速度偏差和质心侧偏角偏差作为控制器输入,计算附加横摆力矩,协调控制不需要建立系统状态的模型并对系统的非线性和不确定扰动都能有较好的控制效果。仿真结果表明,在3种扰动下即阶跃扰动下直接横摆力矩峰值下降66.87%,正弦扰动下质心侧偏角的变化域相对更小,混合扰动下协调控制的质心侧偏角最大值为-0.005 6 rad。通过稳定判断得到协同控制策略可以很好地抑制干扰,保证车辆的稳定性。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
北京航空航天大学学报(2021年4期)2021-11-24
民用飞机设计与研究(2020年4期)2021-01-21
新课程·中学(2019年7期)2019-09-17
物理教学探讨(2018年1期)2018-02-13
中学生数理化·高一版(2017年3期)2017-07-08
火控雷达技术(2016年1期)2016-02-06
中国铁道科学(2015年4期)2015-06-21
航天器工程(2014年5期)2014-03-11
铁道建筑(2010年11期)2010-07-30