
基于电流模式控制的SEPIC的设计与仿真研究
2023-12-02 02:09王宾
太原学院学报(自然科学版) 2023年4期
王 宾
(安徽电子信息职业技术学院 电子工程学院,安徽 蚌埠 233000)
0 引言
单端初级电感变换器(single ended primary inductor converter,SEPIC)是一种具有既能升压又能降压、输入输出电流脉动较小、输入输出电压极性相同等诸多优点的高阶变换器,广泛应用于便携式电子设备、功率因数校正电路、分布电源系统和电池充电器[1]。相对于传统电压型控制,电流型控制具有逐周期限流的功能,易于实现多个并联开关变换器的均流,瞬态响应速度快[2]。近年来,国内外的专家学者对结构复杂且存在大量非线性现象的SEPIC开展了诸多研究工作。祝熙彤等[3]对电压模式控制SEPIC进行研究时,发现了该控制方式下的SEPIC存在的分岔行为与低频振荡现象,还对系统中的低频不稳定现象采用了数值模拟、理论分析和电路实验的研究方法进行研究。除此之外,刘芳等[4]通过理论分析和仿真结果验证了在电压模式控制SEPIC功率因数预调节器(PFP)中存在的边界碰撞分岔,并且为选取此类系统参数提供了预测稳定边界的方法。在电流模式控制SEPIC的研究方面,王浩宇等[5]为改善间歇性分岔及间歇性混沌等现象导致的不稳定状态,同时又从电路仿真和理论分析这两方面提出延迟微分反馈控制策略。除此之外,龚仁喜等[6]通过运用参数微扰理论和滑模控制理论实现了对SEPIC中混沌现象的控制。
本文以电流模式控制SEPIC为例,设计了其电路参数,并仿真分析了关键电路参数对变换器稳定性的影响。根据SEPIC的工作原理,定量分析了各状态变量间的数学关系,设计并确定了SEPIC电感L1、电感L2、输出电容C2、耦合电容C1等主要电路参数,搭建PSIM(power simulation)仿真电路模型,并仿真分析关键电路参数对SEPIC的稳定性影响,为电源管理技术的研究提供理论支撑。
1 相关理论概述
1.1 工作原理
SEPIC既能实现升压功能又能实现降压功能,而且与Buck/Boost变换器相似,属于正输出变换器,即输出电压极性和输入电压极性不反相。除此之外,SEPIC还有以下两个优点[7]:
1)SEPIC的输入和输出均采用电容隔离,从而可以保护开关电路的电源和负载;2)可以从电源获取连续、平滑的输入电流。SEPIC的原理图如图1所示,从图中可以看出其电路是由输入电压Vin、开关管S、二极管D、电容C1和C2、电感L1和L2组成。

图1 SEPIC原理图
1.2 模态分析
当SEPIC工作在CCM模式时,其在一个工作周期内存在两种开关模态,分为开关模态1和开关模态2[8],这是由加在开关管S上的驱动信号所决定的。当加在开关管S上的驱动信号为高电平时,开关管S导通;当加在开关管S上的驱动信号为低电平时,开关管S关断[9]。上述两种工作模态下的等效电路分别对应图2(a)和图2(b)所示。

图2 SEPIC在一个周期内的两种开关模态
1)开关模态1:当加在开关管S上的驱动信号为高电平时,开关管S导通、二极管D截止。此时,变换器有3个回路,第一个是由输入电压Vin、L1和S构成的回路,在Vin作用下,电感电流iL1线性增长;第二个是由C2、S和L2构成的回路,C1通过S和L2放电,iL2增长;第三个回路是由C2和负载R构成的供电回路,C2电压下降,因C2较大,故VC2=Vo。开关管S导通时两电感电流上升斜率仅由Vin决定,iL1和iL2的下降斜率分别为:
(1)
当开关管S导通时,流过它的电流为:
iS=iL1+iL2
(2)
2)开关模态2:当加在开关管S上的驱动信号为低电平时,开关管S关断,二极管D导通。此时,变换器具有两个回路。第一个是由输入电压Vin、L1、C1、D和负载R构成的回路,电源和电感L1储能,同时向C1和负载馈送,C1储能增加,C2充电,而iL1减小;第二个回路是由L2、D和负载R构成的续流回路,L2将开关管导通时间内的通过转化电感电流iL得到的磁能作为能量提供给负载,所以电感电流iL2会减小。故二极管的电流iD也是电感电流iL1和电感电流iL2之和,即iD=iL1+iL2。这时iL1和iL2的下降斜率分别为:
(3)
当开关管S截止时流过电感L1、L2的电流下降率分别为:
(4)
二极管D导通时,流过二极管D的电流为:
iD=iL1+iL2
(5)
开关管S和二极管D承受的电压为:
(6)
电源的输入电流Iin与SEPIC的次侧级电感L1中的电流的平均值IL1相等,即:
Iin=IL1
(7)
1.3 PSIM电路建模
利用PSIM软件,搭建峰值电流模式控制SEPIC仿真电路,实际上就是完成构成该仿真电路的主电路、驱动电路、控制电路和采样电路这4部分电路的搭建工作,其建模步骤如下[10]。
1)创建PSIM仿真文件。打开PSIM应用程序,新建PSIM文件,保存在指定的位置并命名为“PCM-SEPIC.psimsch”。
2)搭建主电路。依照SEPIC电路原理图,在菜单的元件库“Elements”栏或者快捷键中找到电源E、电感L、二极管D、开关管S、电容C和负载电阻R等电路元件,放置好元件后,再把每个元件根据对应的关系依次画线连接起来构成主电路。
3)搭建采样电路和驱动电路。在元件库“Elements”中找到电流传感器Current Sensor和开关管S,主电路与控制电路之间的连接就是通过这两个元器件来实现的。
4)搭建控制电路。首先在菜单“Elements”栏或快捷键中找到所需的元器件:比较器、两个或非门、参考电压Vref、时钟信号Clock ,再按照电路的工作原理把各个元器件连接起来构成控制电路。
5)设置仿真步长和仿真时间。在“Simulate”(仿真)栏中,点击按钮“Simulation Control”,设定仿真步长为1E-007(即10的负七次方)s,仿真时间为50 ms。
6)电路参数选择。峰值电流模式控制SEPIC应用过程中,电路中的时钟信号频率f(50 kHz)、占空比D(0.01)、耦合电容C1(20 μF)和输出电容C2(200 μF)的电容值等参数在设定好后,就固定好不能再改动;而输入电压E、电感L1(其中电感L2与电感L1保持一致变化且相等)、参考电流Iref、负载电阻R等参数在进行仿真分析时会进行改动。
7)在已经搭建好的峰值电流模式控制SEPIC PSIM仿真电路中,可以在相应元件处并联电压表或者串联电流表,分别测量出相应元件的电压或电流。
2 结果分析
2.1 输入电压对稳定边界的影响
2.1.1E-L1平面的稳定边界
设定电感L1的值范围为50~110 μH,输入电压E的值范围为5.8~7.0 V,同时确定负载电阻R为4 Ω、参考电流Iref为1.8 V,并保持不变。图3(a)所示的就是峰值电流模式控制SEPIC的E-L1稳定边界。从图中可以看出:当电感L1和输入电压E不断增加时,峰值电流模式控制SEPIC的不稳定区域也随之在不断增大。故当电感L1和输入电压E均较小时,峰值电流模式控制SEPIC能够工作得更稳定。
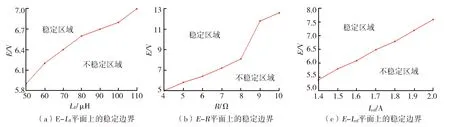
图3 输入电压与各参数的稳定边界
2.1.2E-R平面的稳定边界
设定负载电阻R的值范围为4~10 Ω,输入电压E的值范围为5~13 V ,同时设定好电感L1的值为100 μH,参考电流Iref的值为1.8 A。图3(b)所示的就是峰值电流模式控制SEPIC的E-R稳定边界。从图中可以看出,在E-R稳定边界中:当负载电阻R较小,输入电压E较小时,峰值电流模式控制SEPIC的稳定区域较大。而随着负载电阻R增大,输入电压E增大,峰值电流模式控制SEPIC的稳定区域也在不断减小。因此,在负载电阻R较小和输入电压E较小时,变换器工作更稳定。
2.1.3E-Iref平面的稳定边界
设定参考电流Iref的值范围为1.4~2.0 A,输入电压E的值范围为5.0~8.0 V ,同时设定好负载电阻R为4 Ω,电感L1为110 μH,并保持不变。图3(c)所示的就是峰值电流模式控制SEPIC的E-Iref稳定边界。从图中可以看出:随着参考电流Iref增加,输入电压E增加,峰值电流模式控制SEPIC的稳定区域也在不断减小。因此,在参考电流Iref和输入电压E较小时,峰值电流模式控制SEPIC工作更稳定。
2.2 参考电流对稳定边界的影响
设定负载电阻R的值范围为4.000~4.030 Ω,参考电流Iref的值范围为:1.680~1.698 A ,同时设定好输入电压E为5 V,电感L1为100 μH,并保持不变。
图4所示的就是峰值电流模式控制SEPIC的Iref-R稳定边界。从图中可以看出:当负载电阻R较小,参考电流Iref较小时,峰值电流模式控制SEPIC的稳定区域较大;随着负载电阻R增大,参考电流Iref增大,峰值电流模式控制SEPIC的稳定区域也在不断减小。故当负载电阻R和参考电流Iref均较小时,峰值电流模式控制SEPIC工作更稳定。
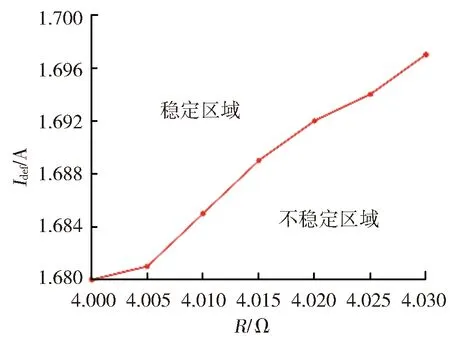
图4 Iref -R平面上的稳定边界
2.3 电感对稳定边界的影响
2.3.1L1-R平面的稳定边界
设定负载电阻R的值范围为:4.0~4.6 Ω,电感L1的值范围为60~80 μH,同时设定好输入电压E为5 V,参考电流Iref为1.8 A,并保持不变。图5所示的就是峰值电流模式控制SEPIC的L1-R稳定边界。从图中可以看出:当负载电阻R较小,电感L1较大时,峰值电流模式控制SEPIC的不稳定区域较大;随着负载电阻R增大,电感L1减小,峰值电流模式控制SEPIC的稳定区域也在不断增大。故当负载电阻R较大和电感L1较小时,峰值电流模式控制SEPIC工作更稳定。
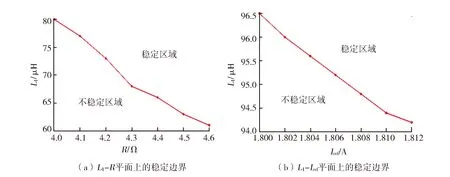
图5 电感与各参数的稳定边界
2.3.2L1-Iref平面的稳定边界
设定参考电流Iref的值范围为1.800~1.812 A,电感L1的值范围为94.0~96.5 μH ,同时设定好输入电压E为5 V,负载电阻R为4 Ω,并保持不变。图5(b)所示的就是峰值电流模式控制SEPIC的L1-Iref稳定边界。从图中可以看出:当参考电流Iref较小和电感L1较大时,峰值电流模式控制SEPIC的不稳定区域较大;而随着参考电流Iref增大,电感L1减小时,峰值电流模式控制SEPIC的稳定区域也在不断增大。故当参考电流Iref较大和电感L1较小时,峰值电流模式控制SEPIC能够工作得更稳定。
综上所述,4个电路参数为变量的E-L1稳定边界、E-R稳定边界、E-Iref稳定边界、Iref-R稳定边界、L1-R稳定边界和L1-Iref稳定边界。在进行峰值电流模式控制SEPIC的设计工作时,这6个稳定边界对电路参数的选取有所帮助,即电路参数可选取在稳定区域所对应的坐标轴数值,这样可使峰值电流模式控制SEPIC工作在稳定状态,尽可能地避免工作在不稳定状态的情况出现。
3 结束语
近年来,随着电子技术的快速发展,各类便携式电子设备、可穿戴设备在人们的生活中得到了广泛的使用。SEPIC因具有升降压功能、输入输出电流脉动小、输入输出电压极性相同等特点,因而被广泛地应用于电池供电的便携式电子设备中。通过PSIM软件来搭建峰值电流模式控制SEPIC电路仿真模型,仿真分析了输入电压E、电感L1、参考电流Iref、负载电阻R等4个关键电路参数对峰值电流模式控制SEPIC变换器工作稳定性的影响,并且给出了变换器电路工作在不稳定和稳定状态时的仿真时域波形图和相轨图,同时说明峰值电流模式控制SEPIC的稳定性会随着输入电压E、电感L1、参考电流Iref的增大而提升,以及稳定性会随着负载电阻的减小而提升。绘制出以上述4个电路参数为变量的E-L1稳定边界、E-R稳定边界、E-Iref稳定边界、Iref-R稳定边界、L1-R稳定边界和L1-Iref稳定边界。
猜你喜欢
儿童时代·幸福宝宝(2021年11期)2021-12-21
延安大学学报(自然科学版)(2021年3期)2021-10-13
证券法律评论(2018年0期)2018-08-31
通信电源技术(2018年5期)2018-08-23
大连理工大学学报(2017年6期)2017-11-22
中学物理·高中(2016年12期)2017-04-22
电测与仪表(2015年16期)2015-04-12
外语学刊(2014年6期)2014-04-18
电测与仪表(2014年13期)2014-04-04
河南科技(2014年14期)2014-02-27
