
飞秒激光加工微悬臂梁薄膜光纤声波传感器
2023-11-30 07:10:26郑怡雯陈永璋唐前浩朱一新于永芹杜晨林阮双琛
光子学报 2023年10期
郑怡雯,陈永璋,2,唐前浩,朱一新,于永芹,杜晨林,3,阮双琛,3
(1 深圳技术大学 广东省高校先进光学精密制造技术重点实验室,深圳 518118)
(2 深圳技术大学 新材料与新能源学院,深圳 518118)
(3 深圳技术大学 中德智能制造学院,深圳 518118)
0 引言
声波探测技术已应用于光声成像、无损检测、自然灾害监测等民用领域[1-3]和水下通讯、水下导航、声纳定位、目标识别等国防安全领域[4-6]。与传统的电容式或压电式声学传感器相比,光纤声学传感器具有独特的优势,如无源、耐高温、耐腐蚀、重量轻、频带响应宽、不受电磁辐射干扰等,光纤声波传感技术可以解决传统电子型声波传感器难以胜任的测量问题。目前,光纤声波传感器应用最广泛、技术最成熟的是非本征法布里-珀罗干涉仪(Extrinsic Fabry-Perot interferometer,EFPI)。EFPI 光纤声学传感器通常由光纤端面和声学传感膜片构成,其声学传感特性主要由膜片决定,硅片[7]、壳聚糖[8]、石墨烯[9]、贵重金属[10]以及复合型薄膜[11]等均可用作EFPI 传感器的敏感薄膜。2018年,ZHOU Han 等[12]使用80 μm 厚的聚二甲基硅氧烷(Polydimethylsiloxane,PDMS)膜片来检测微弱声波信号,获得了约-136 dB 的高动态压力灵敏度。然而,PDMS 膜片厚度过大制约了声压灵敏度的进一步提高,同时传感器的封装方式也需要进一步优化以降低整体的制作成本。2020年,HUANG Qiangqiang 等[13]制作了厚度约为100 nm 的金膜片并用于光纤EFPI 声波传感器。该传感器在2.6 kHz 的频率下具有1.3 mPa/Hz1/2的噪声等效声学信号水平。2021年,XIANG Zhouwei 等[14]将纳米金膜片和光纤准直器封装在玻璃套管内形成EFPI 结构,实现了-175.7 dB 的灵敏度。金膜片具有良好的延展性且易于加工,但成本较高,制备及转移过程过于复杂。
悬臂梁是一种简单的微机械传感元件,可以检测到微小的位移或作用力,通常表现为一段固定的突出横梁结构。基于微机电系统(Micro-electro Mechanical System,MEMS)技术的微悬臂梁传感器因其结构简单、无标签检测、灵敏度高等独特优势,使其在物理、化学、医疗、环境、材料等领域受到大量关注[15-19]。IANNUZZI D[20]在2006年提出了一种在光纤端面制造微悬臂梁以形成EFPI 光纤传感器的结构,这种独特的设计结合了微悬臂梁和光纤传感的共同优势。此后,各种光纤尖端微悬臂结构传感器被广泛设计及应用,与传统的机械式悬臂梁系统相比,光纤悬臂梁传感器具有结构简单、体积紧凑、光路稳定性高等优势。2020年,XIN Fengxin 等[21]提出一种基于悬臂梁结构的光纤声波传感器,用于检测二氧化碳浓度。利用悬臂梁的共振模式和谐波检测技术,该传感系统对二氧化碳的检测极限达到0.044×10-6。
飞秒激光作为一种灵活、高效、非接触式的加工工具,在微纳结构制造领域中有着重要的应用。通过激光辐照,能量可以在短时间内注入目标材料,并将能量集中在焦点位置附近,与未受到激光辐照的其他区域相比,目标区域很容易实现表面性能的改变。与纳秒或皮秒激光相比,飞秒激光具有更短的脉冲宽度和更高的峰值功率,与材料相互作用时会产生剧烈的非线性效应。ALBRI F 等[22]利用商用皮秒激光系统在光纤顶部制造微悬臂传感单元,通过优化激光参数,补偿烧蚀锥角,减少再沉积碎片等方法,并引入抛光工艺,获得了平行于光纤端面且具有光学质量的微悬臂表面。与化学蚀刻法相比,激光直接加工的方式大大缩短了加工时间,具有较高的加工精度。LAUWERS T 等[23]设计并制作了一种带铰链的悬臂梁麦克风,利用激光切割制成不锈钢材质的铰链悬臂梁,并将铰链悬臂梁和光纤装配于金属套筒内,构成了法布里-珀罗(Fabry-Perot,FP)声学换能器,其具有630 mV/Pa 的声波灵敏度。因此,制作一种高精细度、结构简单、灵敏度高、稳定性好以及可重复使用的光纤声波传感器具有重要的研究意义和应用价值。
本文对硅橡胶薄膜光纤声波传感器进行优化,利用飞秒激光加工技术制备出具有微悬臂梁结构的光纤声波传感器,对微悬臂梁结构进行理论计算,最后通过实验对微悬臂梁薄膜光纤声波传感器的声压灵敏度、频率响应特征曲线以及信噪比曲线进行分析。
1 悬臂梁光纤传感器原理
1.1 光纤悬臂梁传感器的结构和传感机理
悬臂梁的典型结构为一边固定另外一边悬空的结构,主要的结构形式包括矩形式、三角式、T 形式、U形式、音叉式和桥式等。不同结构的微悬臂梁常用于不同的领域,例如:三角形结构通常用于原子力显微镜探针,这种结构有利于减小微悬臂梁在探测过程中产生横向位移。T 形梁是在矩形梁的基础上增加了顶端面积,有利于增加生化分子探测中的反应面积。U 形结构使梁顶产生了弯曲,一般应用于加速度的探测,音叉式结构主要用于对角速度的检测,桥式结构一般用于对压力的测量。其中由于矩形结构较为简单,且加工容易,得到了最为广泛的应用,因此本文选择对矩形横梁进行研究。此类光纤悬臂梁传感器结构包括一个矩形横梁和一个固定底座,该底座位于光纤边缘,微悬臂梁固定在金属套筒并与光纤端面平行,其结构示意如图1。光在到达光纤端面时发生部分反射,其余光束透过光纤端面并到达悬臂梁内表面,由于折射率不匹配,悬臂梁内表面也将产生反射光,并重新耦合到光纤中。悬臂梁内表面与光纤端面之间会形成FP 干涉,当外部物理、化学或生物因素引起微悬臂梁偏转时,法布里-珀罗干涉仪(Fabry-Perot interferometer,FPI)的腔长会发生变化。与基于封闭膜片的FPI 传感器相比,光纤微悬臂传感器在相同条件下具有更大的形变量,因此具有更高的灵敏度和较大的动态响应范围。通过解调悬臂梁的挠度,可以准确地测量外部信号。由Stoney 方程可知,矩形微悬臂梁挠度与微悬臂梁表面应力成正比[24],可表示为

图1 光纤悬臂梁传感器结构Fig.1 The structure of the fiber optic cantilever sensor
式中,z为悬臂梁自由端的挠度,l为矩形微悬臂的长度,μ和E分别为材料的泊松比和杨氏模量,h为微悬臂的厚度,Δσ为微悬臂表面受到的应力。因此,悬臂梁的灵敏度可以表示为
可以看出,悬臂梁的灵敏度与其长度、厚度、材料的杨氏模量、泊松比有关。为了研究悬臂梁结构参数对其灵敏度的影响,通过MATLAB 仿真出了悬臂梁长度、厚度与灵敏度的关系图,如图2。从仿真结果可知,当悬臂梁长度一定时,厚度越小,其灵敏度越大;当悬臂梁厚度一定时,长度越长,其灵敏度越大。但是随着厚度的减小,或者长度的增大,由于自身重力的影响,悬臂梁容易变形或卷翘,因此本文采用厚度为6 μm 和12 μm,长度为500 μm 的悬臂梁进行实验研究。
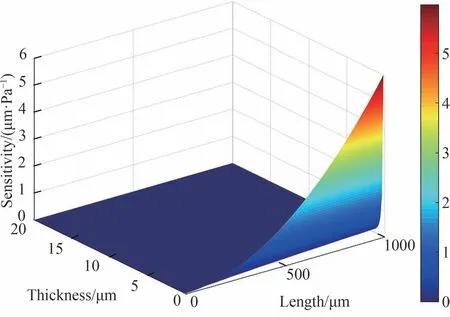
图2 微悬臂梁结构参数与其灵敏度关系Fig.2 The relationship of microcantilever structure parameters and sensitivity
图3 为悬臂梁结构声敏感单元的结构示意图。悬臂梁是单边固定,三边自由的矩形薄膜结构,当外界声波传递到悬臂梁薄膜表面时,声波驱使悬臂梁发生偏转,声波信号将转化为悬臂梁的振动信号。对于端面为矩形的均匀悬臂梁,其一阶共振频率可表示为[25]
图3 悬臂梁薄膜表面示意Fig.3 Schematic of the structure of the cantilever beam thin film surface
1.2 悬臂梁薄膜光纤传感器的解调原理
悬臂梁薄膜自由端在受到外界声波作用下将产生周期性振动,悬臂梁薄膜表面与光纤端面之间的距离,即FP 腔长会随声波的振动而产生周期性变化。由于光纤端面及悬臂梁薄膜表面对光信号的反射率较低,光波在FP 腔内的多次反射可忽略,反射回光纤内部的干涉光强度可表示为
式中,Ii表示入射光的强度,γ为干涉条纹能见度,λ为光波波长,d0代表初始FP 腔的长度,Δd表示悬臂梁摆动的幅度,ω为声波的角频率,t为时间。根据FP 干涉理论,当腔长发生改变时,悬臂梁结构光纤声波传感器的反射光信号将发生变化。利用正交工作点直接测量法就可以实现对外界声音信号的测量,其原理如图4。当FP 腔长改变了半个波长时,光电转换器接收到的光强信号变化了一个周期。可调谐激光器输出的窄带光波长设置位于正交工作点Q附近时,输出光强随FP 腔长的改变发生线性变化,此时斜率为最大值,即声波传感器的灵敏度在此处最大。
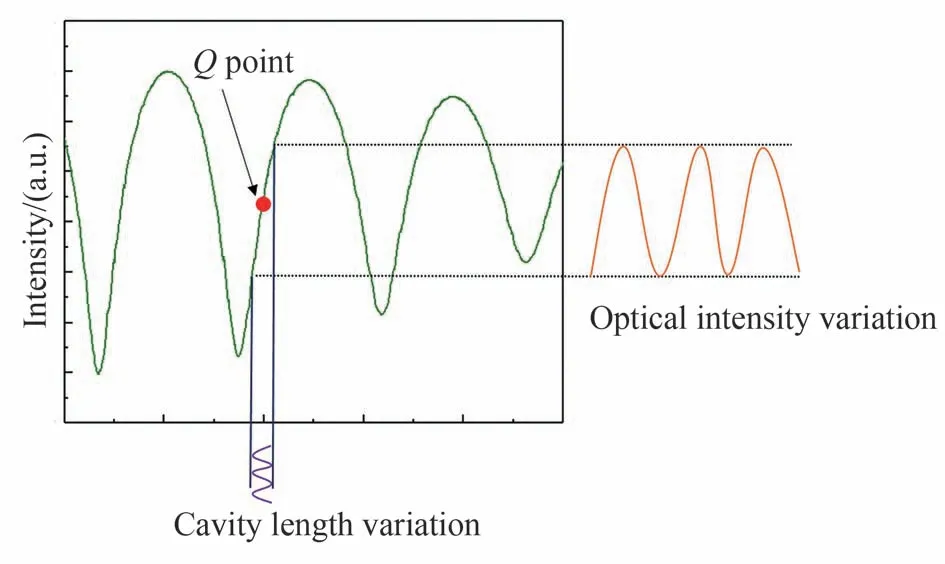
图4 正交工作点直接测量法示意Fig.4 Schematic of the orthogonal working point with direct measurement method
为了检测来自微悬臂梁探头的干涉光信号,需要对获得的光信号进行解调,常见的光纤解调系统如图5。来自光源(通常是宽带光源或可调谐激光)的光通过光纤环行器耦合到微悬臂梁探头,产生的FP 干涉信号通过光纤环形器传输到光电探测器,将光信号转换为电信号,然后利用数据采集卡将模拟电信号转换成数字电信号,最后,利用计算机程序对采集到的信号进行分析处理以还原出微悬臂梁探头处的声波信息。利用微悬臂梁的超紧凑尺寸和光纤解调系统的灵活性,可以对狭窄空间中的目标声音进行远程测量。
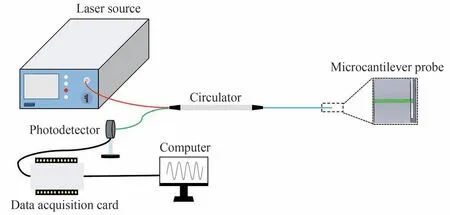
图5 微悬臂梁光纤传感解调系统Fig.5 Micro-cantilever fiber optic sensing demodulation system
2 悬臂梁薄膜光纤声波传感器制作
飞秒激光作为一种灵活、高效、非接触式的加工工具,具有更短的脉冲宽度和更高的峰值功率,可实现对材料的高精度加工[26]。飞秒激光微加工实验装置及其外光路示意如图6。图中的绿色箭头表示飞秒激光的光路,黄色箭头表示照明和成像光路,黑色虚线代表电气控制线路。实验中使用的激光光源(Spectra-Physics Spirit One)波长为520 nm,脉冲宽度为250 fs,最高功率达6 W,峰值脉冲能量为30 μJ,重复频率最高可达200 kHz,通过软件控制脉冲持续时间、输出功率以及重复频率,可实现高度加工灵活性。实验装置中的衰减器(Newport VA-BB-1)和电子高速快门(Newport 76992)在外光路中用于调节飞秒脉冲的功率和控制激光通断。待加工样品放置在三维位移平台(Prior Scientific,H117)上,可实现位移精度为0.01 μm 的XYZ轴移动,移动速度在0.25~25 mm/s 之间可调。照明及成像系统由奥林巴斯显微镜(Olympus BX-53)和图像处理程序(Image Proplus)构成。二向色镜用于将激光引入成像系统中,可实现激光加工和样品观测同步进行。
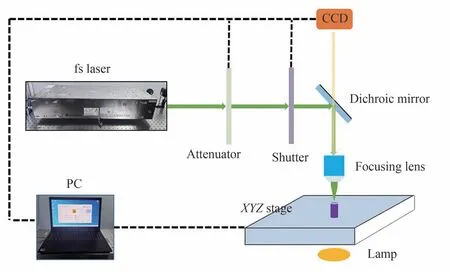
图6 飞秒激光微加工系统示意Fig.6 Schematic of a femtosecond laser micromachining system
通过旋涂-蘸取的方法制作了固定在不锈钢套筒末端的硅橡胶薄膜[27],其结构如图7。制作过程如图8,主要包括以下步骤:1)对光纤进行预处理,再将光纤插入内径约为125 μm 的陶瓷插芯,使光纤末端稍微突出陶瓷插芯。2)旋涂硅橡胶,将硅橡胶滴在放置于匀胶机吸盘上的方形玻璃板上,在匀胶机高速旋转产生的离心力作用下,硅橡胶被甩成厚度均匀的薄膜涂覆在玻璃板上。3)硅橡胶薄膜的转移,将玻璃板从匀胶机的吸盘上取下,放在实验台上,此时硅橡胶还没完全固化。将不锈钢套筒固定在垂直位移平台上,通过位移平台控制不锈钢套管上下移动,当不锈钢套管完全浸没在硅橡胶中,以一定的速度拉升不锈钢套管,玻璃板上的硅橡胶薄膜会转移到不锈钢套管上。在不锈钢材料的可润湿性以及胶体材料的表面张力作用下,不锈钢套管末端会形成一个边缘固定的密闭圆形硅橡胶薄膜,进而硅橡胶与空气中的水分发生作用而固化成弹性体,固化时间一般为10 min。4)将不锈钢套管与步骤1)中连接光纤的陶瓷插芯组装,调节光纤端面与硅橡胶薄膜的间距,利用紫外光固化胶对陶瓷插芯与不锈钢套管进行固定。

图7 硅橡胶薄膜光纤声波传感器的结构Fig.7 The structure of silicone rubber thin film fiber optic acoustic sensor
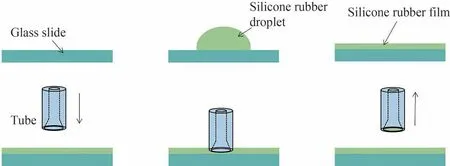
图8 硅橡胶薄膜的制作过程Fig.8 The production process of silicone rubber film
利用飞秒激光在制备成功的硅橡胶薄膜上刻写微悬臂梁。当飞秒激光的能量密度超过硅橡胶的烧蚀阈值后,飞秒激光在硅橡胶薄膜上产生烧蚀作用,获得微悬臂梁结构。为了在硅橡胶薄膜上刻写出平整的微悬臂梁结构,经过对飞秒激光重复频率与单脉冲能量参数的探究,最终确定了合适的飞秒激光刻写参数:波长520 nm、脉冲宽度250 fs、单脉冲能量1.2 μJ、重复频率800 Hz,扫描速度1 mm/s。在悬臂梁薄膜加工过程中,可预先通过软件程序编写好激光的扫描路径,采用上述参数的飞秒激光加工制作出了三个同样尺寸的悬臂梁薄膜(如图9),证明该传感器重复性良好。悬臂梁结构的硅橡胶薄膜为单边固定,三边自由的矩形梁结构,长宽均为500 μm,厚6 μm,位于不锈钢套筒中央。加工过程中激光仅扫描一遍,由于激光功率稍大,导致硅橡胶薄膜有轻微的热变形。最后,将固定好薄膜的不锈钢套筒和陶瓷插芯组装起来,并用环氧树脂进行固定,即完成悬臂梁结构硅橡胶薄膜的装配。

图9 悬臂梁结构硅橡胶薄膜Fig.9 Cantilever structure silicone rubber thin film
3 实验结果与分析
基于微悬臂梁硅橡胶薄膜光纤声波传感器的反射光谱测量装置如图10。宽带光源输出的光束通过光纤环形器传输到传感探头处,单模光纤端面及硅橡胶薄膜的反射光耦合回光纤并发生干涉,再经由光纤环形器传输到光谱分析仪中,利用光谱分析仪记录声波传感器的反射光谱。按上述方式经飞秒激光加工后的悬臂梁光纤声波传感器的反射光谱如图11。此时反射光谱的对比度为8.8 dB,自由光谱范围为7.72 nm,经计算可得光纤端面到悬臂梁薄膜的间距即FP 腔长为155.6 μm。

图10 微悬臂梁光纤声波传感的反射光谱测量装置Fig.10 Spectrum measurement setup for micro-cantilever fiber optic acoustic sensing

图11 微悬臂梁光纤声波传感器反射光光谱Fig.11 Interference spectrum of the micro-cantilever fiber optic acoustic sensor
为了测试微悬臂梁结构硅橡胶薄膜光纤声波传感器的性能,采用正交工作点直接测量法探究传感器的频率响应特征曲线、幅度响应特征曲线以及信噪比特征曲线。微悬臂梁结构光纤声波传感器的实验装置与测试硅橡胶薄膜光纤声波传感器系统相同,如图12。为了检测与校正声波信号,实验中加入了声压灵敏度为47.7 mV/Pa 的参考麦克风(BSWA-MPA201)。整个传感系统包括:可调谐窄带激光器(UC Instruments)、光纤环形器、静音箱、光学麦克风、电学麦克风、扬声器、信号发生器(Gwinstek-AFG2225)、光电探测器(Thorlabs-PDA10D2)、前置放大器以及示波器(Gwinstek-GDS1102B),EFPI 光纤传感器即为所制作的微悬臂梁光纤声波传感结构。在静音箱中,微悬臂梁光纤声波传感器与参考传感器正对扬声器并对称放置在轴线两侧,以确保两者接收到的声场信息一致。在声波传感系统中,可调谐窄带激光器作为光源输出光信号,通过光纤环形器传输到微悬臂梁光纤声波传感探头中,激光器输出的窄带光信号的波长位于光纤传感器的正交工作点。光信号分别在光纤端面和硅橡胶薄膜处发生菲涅尔反射,反射光重新耦合到光纤中并发生FP 干涉。干涉光信号通过光纤环形器输出到光电探测器探测窗口,光电探测器将所探测到的光强转换为电信号输入示波器中。示波器可记录光学麦克风和电学麦克风输出信号随时间变化的波形。若将示波器改为数据采集卡,就可以直接读取测量的声音数据。扬声器输出声波的频率和幅值由信号发生器决定,当声波经空气介质扩散到传感器处时,微悬臂梁硅橡胶薄膜受到声压的作用发生周期性振动,将会引起FP 腔内两干涉光信号相位差的改变,进而使输出光强发生变化,对示波器的信号进行分析可获取待检测的声音信息。

图12 光纤声波传感系统装置Fig.12 Experimental setup for fiber optic acoustic sensing system
图13为悬臂梁光纤声波传感器在300~3 000 Hz范围内的频率响应特征曲线。从图中可以看出,传感器在不同频率范围内的灵敏度各不相同,在2 200 Hz 处出现明显的共振特征峰,对应的声压灵敏度为414 mV/Pa。在300 Hz 时有最大的灵敏度675 mV/Pa,与未进行飞秒激光加工的硅橡胶薄膜传感器具有的最大灵敏度387 mV/Pa 相比,悬臂梁结构声波传感器的灵敏度显著提高。实验中使用的硅橡胶材料的杨氏模量为6.52 MPa,密度为2.5 g/cm3,代入式(3)计算可得硅橡胶悬臂梁光纤声波传感器的一阶共振频率为198 Hz。理论计算的共振频率与实验测得的灵敏度最大处一阶共振频率300 Hz较为接近。1 250 Hz处约为该悬臂梁传感器的6阶共振频率,2 200 Hz处约为该悬臂梁传感器的11阶共振频率,因此也会出现特征峰。另外可以观察到,在300~500 Hz范围内,声压灵敏度出现了明显的衰减。主要原因是测量时硅橡胶薄膜受到的声压过高所致。
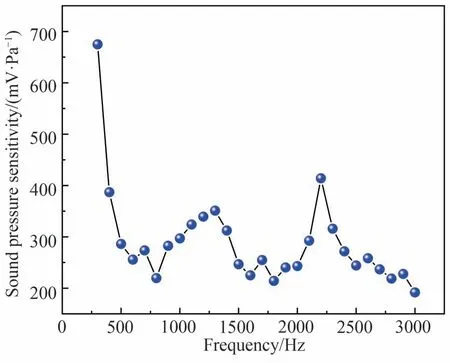
图13 微悬臂梁光纤声波传感器频率响应特征曲线Fig.13 Frequency response characteristic curve of micro-cantilever cantilever fiber optic acoustic sensor
由于在输出频率为300 Hz 时,该悬臂梁光纤传感器具有最大灵敏度,因此将频率处于300 Hz 时的悬臂梁传感器用于声压测量,其输出电压与其受到的声压的关系如图14。图中数据表明,悬臂梁传感器的声压灵敏度可达675 mV/Pa,声压响应线性度为0.994。较高灵敏度的产生是由于悬臂梁三边自由一边固定的结构,悬臂梁末端在受到空气中的声波驱动时能产生更大的摆动幅度。另一方面,在实验中发现悬臂梁光纤声波传感器的声压响应范围较小,当声压大于0.4 Pa 时,传感器的输出电压不再增大,且示波器上记录的时域响应波形会发生畸变。这是由于悬臂梁自由端的摆动幅度大于自由光谱范围所对应的FP 腔长变化量,工作点超出了线性区域导致的。信噪比是评价声波传感器的一个重要指标,在扬声器输出声压固定在0.2 Pa 时,实验测量了300~3 000 Hz 范围内悬臂梁光纤声波传感器的信噪比,如图15。可以看出悬臂梁光纤声波传感器具有比较平坦的信噪比,平均信噪比大于34 dB,可达到对微弱声音监测的应用需求。
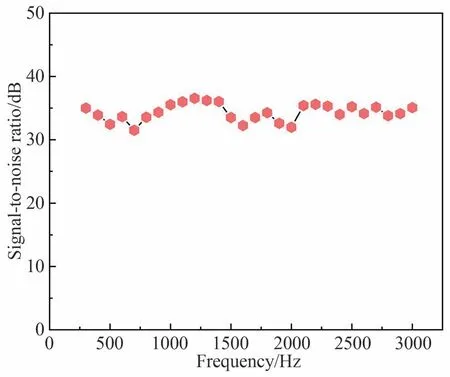
图15 微悬臂梁光纤声波传感器信噪比曲线Fig.15 The signal-to-noise ratio curve of micro-cantilever fiber optic acoustic sensor
为了研究悬臂梁厚度对传感器声波响应的影响,使用相同方法制作了长宽为500 μm,厚度为12 μm 的悬臂梁结构,并测量了其在100~3 000 Hz 范围内的频率响应特征曲线,如图16,在1 260 Hz 处出现明显的共振特征峰,此时有最大的灵敏度为221 mV/Pa。理论计算得该硅橡胶悬臂梁光纤声波传感器的一阶共振频率为396 Hz,1 260 Hz 处约为该悬臂梁传感器的3 阶共振频率。由于在1 260 Hz 处悬臂梁传感器具有最大声波灵敏度,因此在该频率下对传感器进行声压测量,当扬声器输出频率为1 260 Hz 的声波信号时,悬臂梁声波传感器的输出电压与其受到的声压的关系如图17。由于悬臂梁受到的具体声压值是通过计算得到的,因此其变化不是等间距的,在声压增大和减小过程中声压值不一定相同。图中数据表明,在声压增大和减小过程中,声压与输出电压呈线性关系,声压响应线性度为0.995,该悬臂梁传感器的声压灵敏度为239 mV/Pa,略高于频率响应曲线中测得的灵敏度,可能是由于在低声压下,电学麦克风的信号波形不稳定,计算声压值时会产生误差。与长宽为500 μm,厚度为5 μm 的悬臂梁结构相比,传感器的灵敏度降低,这与式(2)相符,而其一阶共振频率增大,与式(3)一致。
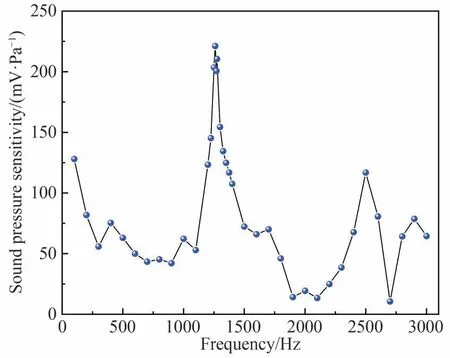
图16 厚度为12 μm 的悬臂梁频率响应特征曲线Fig.16 Frequency response characteristic curve of microcantilever cantilever with a thickness of 12 μm

图17 厚度为12 μm 悬臂梁的声压响应Fig.17 Sound pressure response of the micro-cantilever with a thickness of 12 μm
4 结论
本文基于悬臂梁光纤传感器的结构和传感机理,提出采用飞秒激光加工硅橡胶薄膜,制备出具有微悬臂梁结构的光纤声波传感器,获得了长宽均为500 μm,厚为6 μm 的悬臂梁结构。获得了对比度为8.8 dB,自由光谱范围为7.72 nm 的反射光谱,理论计算光纤FP 腔长为155.6 μm。实验结果表明,该微悬臂梁光纤声波传感器在不同频率范围内具有不同的灵敏度,在2 200 Hz 处对应的声压灵敏度为414 mV/Pa,能够观察到明显的共振特征峰。在300 Hz 处有最大灵敏度为675 mV/Pa,与普通硅橡胶薄膜声波传感器相比,微悬臂梁结构光纤传感器实现了更高灵敏度的声波传感。通过理论计算微悬臂梁光纤声波传感器的一阶共振频率,证明与实验中获得的共振频率基本一致。悬臂梁结构光纤声波传感器实现了大于34 dB 的平均信噪比,满足光纤声波传感对微弱声音监测的应用需求。
猜你喜欢
数学物理学报(2022年4期)2022-08-22 04:09:20
人人健康(2021年16期)2021-12-01 07:08:33
制造技术与机床(2019年8期)2019-09-03 01:14:18
华东师范大学学报(自然科学版)(2019年3期)2019-06-24 05:29:09
汽车工程(2018年12期)2019-01-29 06:46:36
中国测试(2018年10期)2018-11-17 01:58:42
系统工程与电子技术(2016年2期)2016-04-16 05:16:52
电测与仪表(2016年9期)2016-04-12 00:30:02
橡胶工业(2015年8期)2015-07-29 09:22:46
橡胶工业(2015年6期)2015-07-29 09:20:48
