
大气激光通信载波光信号接收过程中光斑检测技术研究*
2023-11-21 13:07:16徐培玲
电子器件 2023年5期
徐培玲,王 玉
(1.山西经济管理干部学院电子信息系,山西 太原 030024;2.中北大学信息与通信工程学院,山西 太原 030051)
随着我国经济水平的增长,我国人民的生活环境日益改善。人民生活水平提升的同时,通信技术[1]也在逐步可靠发展。早于1960 年,美国学者就研制出用于通信的人造卫星,为无线通信技术奠定了坚实的基础。无线光通信技术主要是依据大气承载信息开展通信,但是激光在向大气传达信息时,会受到大气湍流的影响增加大气激光通信光信号接收信息中的光斑,从而降低通信的质量,因此需要在大气激光通信[2]光信号接收时,开展必要的光斑检测,从而提升大气激光通信的质量。
文献[3]提出基于位置敏感半导体光电器件的同步辐射光斑位置检测。该方法首先依据光斑检测要求,对光电探测器开展优化设计;再基于优化后的二维光电位置探测器确定光斑位置;最后通过激光光斑尺寸算法完成激光光斑尺寸的确定,实现激光的光斑检测。
文献[4]提出一种水下激光通信系统的光斑检测算法。该方法首先对光斑图像实施去雾操作,增强图像中光斑与背景的对比度;再使用高斯滤波算法对图像进行去噪处理,基于图像二值化结果,提取激光光斑;最后依据灰度中心算法对光斑开展检测,完成光斑的中心计算。
文献[5]提出复杂背景下的激光光斑中心检测算法。该方法依据双边滤波算法对光斑边缘实施增强处理;再依据改进的梯度模板,缩减光斑边缘的断裂现象,引入形态学理论,去除光斑图像背景;最后通过椭圆拟合方法实现光斑的中心点检测。
由于上述方法没有对提取到的光斑形状实施修正处理,导致上述方法在开展激光光斑检测时,存在检测时间长、检测效果差的问题。
为解决上述光斑检测方法中出现的问题,提出大气激光通信载波光信号接收过程中光斑检测技术。
1 光斑图像处理
1.1 大气激光通信光信号图像转换
由于大气中通信环境复杂,使用的接收信号器通常为半导体激光器,因此需要使用A/D 转换器,将大气通信载波光信号接收信息转换成信号图像,直观地表现出光信号中存在的光斑。再使用高斯滤波算法对采集的原始光斑图像进行去噪处理。
信号在图像转换过程中,选取光波导A/D 转换器作为信号转换的转换器机型。该转换器核心为Mach-Zehnde 调制器阵列,主要由推挽驱动式信号电机以及直流电机组合而成。其中,信号电极负责信号电压的模拟调制,直流电极负责消除调制器的相位不平衡。
转换器在设计时,需要依据光信号的光效应,获取调制器的相位差,通过直流电极消除相位差,完成调制器的上下臂合成,输出光信号的光强,从而生成激光通信光信号的信息图像,如下式所示:
式中:信号调制时产生的静态相位差描述为ηn,外加电压产生的相位差标记为ζn,余弦函数标记为cos,光信号光强值标记为Gn,消除因子标记为γ。最后通过上述计算结果获取大气激光通信光信号的光强值,生成光信号的信息图像。
图像生成后,使用高斯滤波方法滤除图像表面噪声。高斯滤波方法是引入加权因子的图像均值滤波算法,使用该方法开展图像去噪时,图像的去噪效果柔和,图像边缘清晰。
设定原始光斑图像的像素为(m,n),像素方差为ε2,以此完成原始光斑图像的高斯滤波去噪处理,结果如下式所示:
式中:δ表示滤波器尺寸参数,光斑原始图像的图像去噪结果标记为H(m,n),光斑中心至像素点之间的距离标记为m、n。
1.2 图像增强
为了保证转换后图像中光斑可以最大范围地增强,根据Retinex 原理将去噪后的光斑图像分成照度图像与反射图像两个部分。考虑到激光通信光信号反射通常比反射图像更暗,因此,在增强照度图像的基础上,利用Sigmoid 函数对反射图像实施运算,使照明差异均匀,实现最大范围的图像增强,为光斑检测奠定基础。
综合上述分析,将采集的光斑图像描述为式(3):
式中:采集的光斑原始图像用A(m,n)表述,反射图像描述成E(m,n)形式,照度图像用K(m,n)描述。
1.2.1 照度图像增强方法
采用双边滤波方法对原始光斑图像照度实施估计处理,设定光斑图像像素集合为Ψ,图像的滤波输出结果如下式所示:
式中:光斑原始图像的滤波输出结果标记为Va,高斯函数分别描述成为f、g,图像中像素点o的亮度值标记为Uo,a点亮度值标记为Ua,标准化因子描述成为J(A)。
基于上述计算结果可知,原始光斑图像中,计算像素点a的亮度值时会受到相邻像素的影响,从而降低图像的照度计算效率,因此需要结合灰度分层方法[6]提高图像的照度计算效率,具体流程如下:
①使用三维网格描述光斑图像的二维灰度图像,一维、二维网格与图像像素位置对应,三维网格对应图像亮度。
②建立固定阈值,对三维网格进行初始化处理,结果如下式所示:
式中:网格固定阈值标记为Φ(om,on,r),网格维度与像素对应结果标记为(om,on),亮度值标记为r。
③基于上述计算结果对网格展开高斯滤波处理,结果如下式所示:
式中:高斯的三维图像函数标记为Gαa,αr,光斑图像的空域向量用αa表述,亮度向量描述成αr,滤波处理结果表述成V[Φ](om,on,r)。
④最后将图像的滤波处理结果放入网格中,完成光斑图像的照度估计计算。
光斑图像完成照度估计后,使用直方图截取方法对光斑照度图像直方图两端开展截取处理,将剩余图像像素压缩至[0,1]范围内,依据Gamma 算法对其展开校正处理,通过校正处理结果完成最终照度图像的计算,结果如下式所示:
式中:光斑图像的原始像素值标记为i,图像照度标记为n(i),校正函数用β表述。
1.2.2 反射图像增强方法
光斑照度图像增强后,为了保证整体光斑图像的增强效果,对反射图像进行增强。建立图像对数域,将光斑原始图像以及照度图像放入其中开展做差运算,可以直接获取光斑图像的反射图像,再使用Sigmoid 函数对反射图像实施运算,即可完成反射图像的增强处理[7],过程如下式所示:
式中:增强结果用s(r)表述,增强系数用w表述。
2 光斑检测方法
2.1 阈值分割
图像完成增强后,激光光斑图像[8]中背景灰度值低,光斑灰度值高,因此可采用阈值分割方法对激光光斑实施粗提取处理,将激光光斑从图像背景中分离出来。
常用图像阈值设定方法通常有固定阈值以及自适应阈值两种。固定阈值主要依据实验标定获取图像的单一阈值实现图像的处理,但是图像的实验条件与实际条件之间偏差较大;自适应阈值主要依据图像灰度值的分布状态开展图像的阈值计算,灵活性较强。因此在激光光斑图像阈值分割时,选取自适应阈值完成激光光斑图像的阈值分割。
依据激光光斑图像灰度值分布特点,使用统计分布方法建立激光光斑图像的自适应阈值模型,过程如下式所示:
式中:建立的图像自适应阈值模型用y表述,光斑图像的阈值计算结果描述成C,常数标记为l,激光光斑图像的平均灰度用Qavg表述,灰度均方误差用ϑ表述。
依据上述计算结果,假定激光光斑图像尺寸为p×q,以此计算激光光斑图像的平均灰度以及灰度均方误差,结果如下式所示:
式中:激光光斑图像像素点(i,j)的灰度值标记为R(i,j)。
最后基于上述计算结果,完成图像的阈值分割,实现激光光斑图像的光斑提取。
2.2 图像几何纠正方法
依据提取的光斑可知,激光光轴与靶面之间存在夹角,因此采集的激光光斑图像不是激光光斑的正射图像,所以在开展光斑检测时,需要选取相关方法对提取的光斑展开几何变换纠正[9]。过程如图1所示。
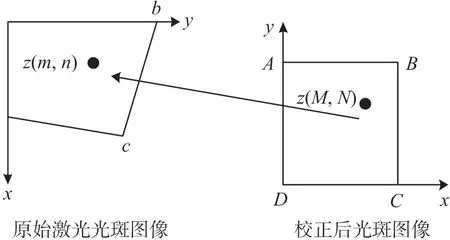
图1 激光光斑图像几何纠正流程
依据图1 可知,光斑在几何校正时,需要从空白阵列出发,通过对图像像元位置进行计算,完成光斑的过重采样,从而构建出激光正射光斑。
设定提取的原始激光光斑为z(m,n),纠正后激光光斑为z(M,N),以此计算二者之间的变换关系,过程如下式所示:
式中:光斑坐标的二元多项式用Fm、Fn表述,光斑像元的原始坐标用(m,n)表述,纠正后的光斑位置用(M,N)表述。
光斑校正后,选取激光光斑相邻像素点作为十字丝标记的已知点,结合最小二乘法完成光斑坐标的多项式求解。因为光斑校正前后的像元位置变化,会导致图像的灰度变化,因此还需要采用双线内插算法对光斑投影点灰度展开计算,获取几何修正后的激光光斑图像。
2.3 光斑中心检测
激光光斑几何纠正后,直接对获取的正射光斑开展检测并计算光斑中心位置。
使用Hough 变换算法[10-11]将图像从空间域变换至参数空间中,通过光斑的极值点检测,确定光斑曲线参数,完成光斑的规则抽取。
设定激光光斑的圆周点集合为{(pi,qi)|i=1,2,…,x},参数位置标记为(s,t,r),以此建立光斑圆周极坐标方程,过程如下式所示:
式中:光斑圆周极坐标方程用(s,t,r2)表示,光斑的余弦夹角用cosφ描述,而正弦夹角则表述成sinφ形式。
依据上述计算结果检测光斑边缘,设定参数λ和r为像素的量化间隔,获取光斑图像与光斑边缘之间的距离,以此计算光斑的中心位置,完成激光光斑的检测,过程如下式所示:
式中:激光光斑与边缘之间的距离标记为d,光斑中心位置标记为g(m,n)zx,激光光斑影像的实际形变量用θ表述。
3 实验
3.1 实验准备
为了验证上述激光光斑检测方法的整体有效性,需要对整个实验进行搭建与调试。实验使用星特朗Nexstar8SE 望远镜作为收发天线,2 台MV-300UC 型号CCD 工业相机作为前端捕获相机,2 台EM-200CM型号CCD 工业相机作为后端跟踪相机,此外还需要PC 机以及室外供电设备,实验系统搭建如图2 所示。

图2 实验搭建示意图
3.2 实验结果及分析
分别采用大气激光通信载波光信号接收过程中光斑检测技术(所提方法)、基于位置敏感半导体光电器件的同步辐射光斑位置检测(文献[3]方法)、复杂背景下的激光光斑中心检测算法(文献[5]方法)展开测试;
在测试激光光斑检测方法时,激光光斑检测方法的检测性能是测试光斑检测方法优劣的关键。采用所提方法、文献[3]方法以及文献[5]方法展开激光光斑检测过程中,选取光斑圆心偏差率、检测时间以及光斑检测效果作为激光光斑检测的测试指标,以此检测上述3 种光斑检测方法的检测性能。
①光斑圆心偏差率测试
激光光斑在检测时,激光光斑中心位置定位是检测过程的关键环节。选取激光光斑圆心偏差率为测试指标,以此测试所提方法、文献[3]方法以及文献[5]方法的光斑中心定位情况。设定激光光斑圆心偏差率为ρ,计算过程如下式所示:
式中:激光光斑实际圆心与检测圆心之间的偏差距离标为记l0,光斑实际半径描述成R。
根据上述计算结果可知,激光光斑在检测过程中,计算出的激光光斑中心偏差率越高,说明激光光斑检测方法的检测性能越差,激光光斑中心偏差率越小,说明激光光斑检测方法的检测性能越好。
为精确反映检测方法的检测精度,随机生成100 张人工激光光斑图像,其中50 张为无噪声干扰图像,另外50 张添加噪声干扰,分别对不同数量的样本圆进行检测,光斑中心偏差率越低,说明该方法检测结果具有更好的精度。3 种激光光斑检测方法的光斑中心偏差率测试结果如图3、图4 所示。
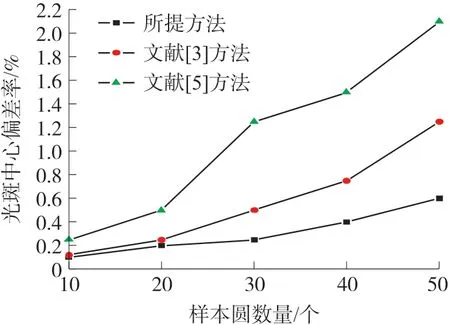
图3 无噪声情况下不同检测方法的中心偏差率测试结果
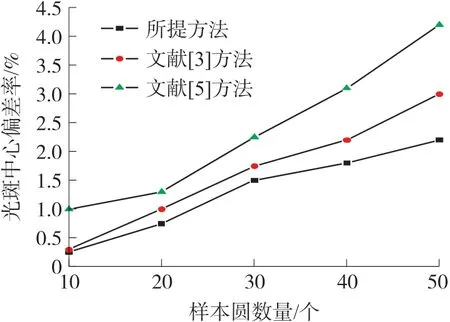
图4 噪声干扰下不同方法的中心偏差率测试结果
分析图3 可知,随着样本圆数量的增加,3 种光斑检测方法检测出的圆心偏差率均出现不同程度的增大趋势。但是,所提方法测试出的激光光斑圆心偏差率是3 种光斑检测方法中最低的,由此可说明所提方法在激光光斑检测时,定位精度高。
分析图4 可知,与无噪声图像对比,噪声干扰下激光光斑中心偏差率测试结果要高于无噪声环境的激光光斑偏差率测试结果。但是,所提方法在噪声干扰下测试出的激光光斑圆心偏差率依旧是3 种方法中最低的,证明所提方法在开展激光光斑检测时,不易受到噪声干扰。
②执行时间测试
在开展激光光斑图像检测时,执行时间的长短同样是测试检测方法检测性能的关键。采用所提方法、文献[3]方法以及文献[5]方法开展激光光斑检测时,对上述3 种方法的执行时间展开测试。测试方法为分别对不同尺寸的图像进行检测,检测耗费的时间越少,表示该方法的检测效率越高。测试结果如表1 所示。
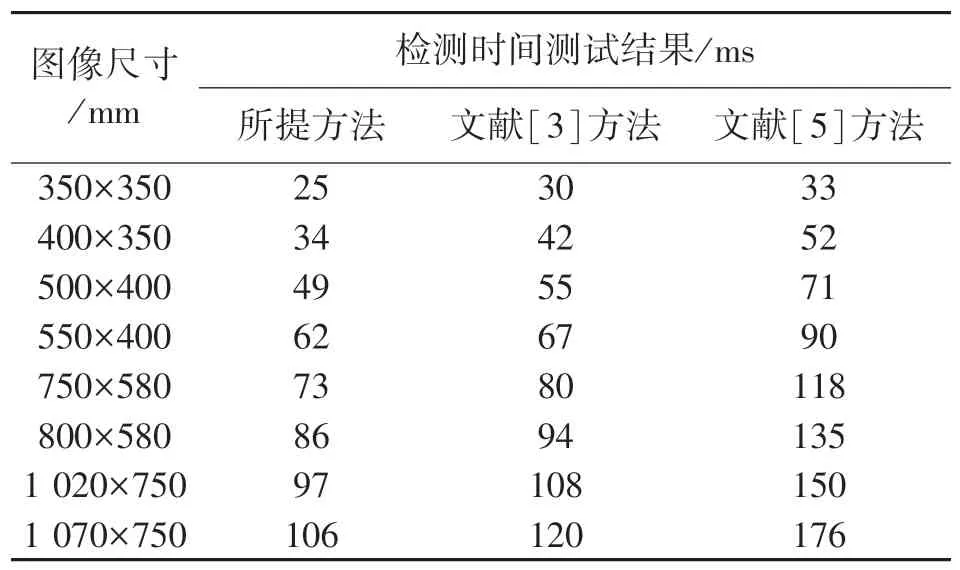
表1 不同方法的检测时间测试结果
分析表1 可知,随着图像尺寸的增加,3 种激光光斑检测方法的执行时间都呈现出不同程度的上升趋势。其中,所提方法检测出的光斑检测时间是3种方法中最低的,这主要是因为所提方法在激光光斑检测时,采用阈值分割方法对激光光斑开展提取处理,因此所提方法在激光光斑检测时,检测时间低于其他两种方法,说明该方法的检测效率更高。
③检测效果对比
基于上述测试结果,对所提方法、文献[3]方法以及文献[5]方法的光斑检测效果进行测试,以原始图像作为标准,检测到的光斑形状越接近原始图像,表示该方法的检测效果越好。为了直观地对比不同方法光斑形状的效果,在输出实验结果时将不同方法的光斑检测范围用框线进行描述,检测出的光斑中心用黑色实心原点进行描述。测试结果如图5 所示。
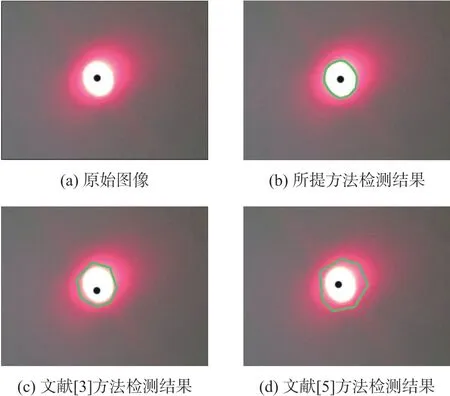
图5 不同方法的光斑检测效果
分析图5 可知,所提方法在开展激光光斑图像检测时,检测出的激光光斑中心以及光斑形状均与光斑实际中心、形状相一致,其主要原因是所提方法利用Retinex 原理增强去噪后的光斑图像,并从中提取和修正了光斑形状,在此基础上基于光斑曲线参数计算激光光斑变形值,优化了光斑中心检测结果。而文献[3]方法以及文献[5]方法的检测结果与实际结果之间存在较大偏差。由此可证明,所提方法在激光光斑检测时,检测方法具备有效性。
4 结束语
由于激光通信过程中,接收的信息中会存在大量光斑,对大气通信产生的影响巨大,因此对激光通信中载波光信号接收过程的激光光斑开展检测就变得尤为重要。针对传统激光光斑检测方法中存在的问题,提出大气激光通信载波光信号接收过程中光斑检测技术。该方法通过激光光斑图像的增强结果,提取图像中的光斑形状;再采用Hough 变换算法完成激光光斑的中心定位,实现光斑的检测。由于图像在去噪过程中存在问题,因此需要针对该项问题继续对该方法进行优化处理。
猜你喜欢
都市(2023年6期)2023-12-28 07:56:54
诗歌月刊(2023年1期)2023-03-22 14:06:24
北京航空航天大学学报(2022年6期)2022-07-02 02:00:02
高技术通讯(2021年3期)2021-06-09 06:57:48
阅读(高年级)(2019年9期)2019-11-15 07:22:54
阅读与作文(小学高年级版)(2019年8期)2019-10-16 04:46:50
光源与照明(2019年4期)2019-05-20 09:18:24
电子测试(2018年9期)2018-06-26 06:45:40
自动化学报(2017年5期)2017-05-14 06:20:56
光学精密工程(2016年1期)2016-11-07 09:01:59
