
三维激光扫描技术在建筑立面测绘中的应用研究
2023-11-20 08:41毕淑娟
建筑与预算 2023年10期
毕淑娟
(沧州市不动产测绘有限公司,河北 沧州 061000)
1 三维激光扫描技术在建筑立面测绘中的应用
1.1 三维激光扫描立面测图方案
在野外作业时,应选用架式激光扫描器,以确保原始资料的准确性和测绘工作的便捷性。设计扫描仪在测绘作业过程中的参数,见表1。
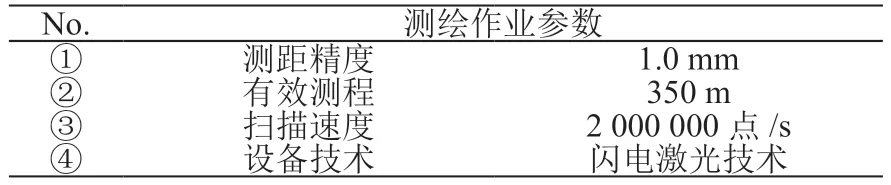
表1 三维激光扫描仪在测绘作业过程中的参数
使用上述提出的三维激光扫描仪,对待测建筑立面进行测绘,测绘过程中,仅需要2~3 min便可以完成一个站点的扫描。在进行点云绘制时,可以采用AutoCAD、Trimble Business Center 等辅助工具,在引入基本点云后,绘制过程与以前的工作模式基本一致。此外,还可以直接利用Trimble RealWorks(简称TRW)等专业点云处理平台,进行建筑外立面的辅助绘制。
1.2 外业扫描与采集数据预处理
TRW软件实现了基于平面点云的自动配准,而外业扫描也可以通过TRW 实现无标靶操作。扫描过程中,仅需要确保两个站点在同一平面上存在重叠,同时也可以在同一平面上进行扫描即可,此种方式不仅可以提高扫描工作的效率,还可以提高数据自动定位的准确率[1]。为确保外业扫描工作的规范化实施,提出重点关注以下几点要求。
(1)在自动配准中,仅垂直面可进行初始化运算。地板、天花板、桌子等水平面在后期被用于精细定位和管理。
(2)扫描作业空间中,<30 cm×30 cm的平面区域,将不被单独采集,即会在扫描中被忽视。
(3)对两个测量点进行校准,要求3 个以上的平面作为参照。
(4)在一个相对对称的位置上,可采用添加或附加平面物体的方式,增加图像与信息配准的成功率。
(5)如果项目涉及外业扫描作业,建议将扫描站点设置在建筑门口位置,便于后期点云的处理。
通过上述方式采集或获取的作业数据具有海量特点,加之数据组中存在大量的冗余数据会对测绘结果造成干扰,因此,需要通过对数据的预处理,进行测绘结果的初步整理与总结。
点云数据的去噪处理:对于数据集合中一些人眼可以直接看到的噪声数据,可以通过点云数据软件中的交互工具,手动圈出噪声区域,对其进行去噪[2]。去噪处理过程如下:
式中:I代表去噪处理过程;p代表噪声区域;n代表噪声点数量;P代表点云数据软件中的交互工具。对初步去噪处理后的采集图像与数据进行训练,设置迭代次数,剔除多种可能对测绘数据造成影响的因素,保证所采集作业数据具有精简性优势[3]。
1.3 点云数据配准
点云的匹配技术是模型重构、形状检测、产品检测和计算机视觉等方面的一个关键技术。由于受观测设备角度、环境等因素的制约,难以从单一观测站中直接获得目标图像的全貌,所以必须从多个角度、多个位置上采集到的数据,而各观测站所收集的点云数据都在彼此独立的坐标系中,必须将点云的数据分别转化为相同的参照系,从而完成点云数据的融合与配准。
采用 TRW 自动化的自动校准功能,一键完成全部测试站点的拼接。在配准期间,应选取1 个基准站,在基准站的定位过程中,其它站点将与基准站点共同找到共同的部件,并用平移转动将其拼接到合适的位置,从而使参考站点为水平站。具体的自动注册流程如下。
(1)粗略配准法:对各站点的垂直面进行分析,并对其进行编号,求出各站点间的对应关系,将其作为点云数据配准的唯一解。
(2)精准配准法:利用迭代最近点法(ICP),使点云数据在空间内具有最大交叠率,根据交叠区域内的点云处理残差值,进行数据的精准配准。将配准过程作为坐标转换过程,计算公式如下。
式中:X、Y、Z分别代表建筑立面中的3 个坐标轴;K代表坐标轴旋转参数。在对点云进行配准之后,要对其按照上述步骤进行降噪和分割。TRW 软件能根据点云的几何特性,对点云进行快速分类,减少了传统人工分类的工作量,提高内业处理的效率。
1.4 生成建筑立面测绘图示
在上述内容的基础上,按照以下步骤,进行建筑立面测绘图示的生成设计:
(1)点云的数据可以通过软件直接设定成las 格式,并且可以通过定义坐标轴来导出。
(2)用自动编码Recap 将las 格式的点云转化为rcp。
(3)查看所输入的数据是否符合所需的检视方向,若不符合,应调整点云坐标系统,使其与检视坐标系保持一致,通过此种方式,生成建筑立面灰度图像,对灰度图像进行色彩转换,即可生成立面测绘图示。如图1 所示。

图1 建筑立面测绘结果生成
图1 中,左侧图为测绘结果中的灰度图像;右侧图为建筑立面测绘生成图像。
按照如上方式,生成建筑立面测绘结果,完成建筑立面测绘。
2 对比分析
上述从理论方面探究了三维激光扫描技术的应用思路,为进一步验证基于这一技术的测绘方法是否能够实现对建筑立面的高精度测绘和测绘工作开展时的效率,以某建筑项目作为依托,将上述提出的测绘方法与当前建筑立面测绘中应用的传统测绘方法应用到该建筑项目当中,并针对两种测绘方法的应用效果进行对比分析。
首先,从两种测绘方法的测绘精度方面进行对比,选择以该建筑某一立面结构为例,针对该立面在其结构上随机设置10 个测绘点,将测绘点依次定义为:测绘节点I~测绘节点X。针对这10 个测绘点,记录其实际在建筑立面上的位置平面位置坐标,将该立面某一角作为平面位置坐标的原点,将原点坐标设置为(0,0),依次为基础,记录其他10 个测绘点的平面位置坐标,并记录如表2 所示。

表2 试验中10 个测绘点的位置坐标
按照上述内容,完成对各个测点实际位置坐标的记录后,将其作为建筑立面测绘精度的标准,若测绘得到的立面图上各个测绘点的位置坐标与上表中记录的数据相比,相差在(±0.5,±0.5)cm 以内,则说明该测绘方法的测绘精度符合建筑立面测绘要求,反之若某一测绘方法得到的立面图上各个测点的位置坐标与上表中记录数据相比相差超过(±0.5,±0.5)cm 范围,则说明测绘精度不符合建筑立面测绘要求。根据上述论述,将两种测绘方法得到的立面图中各个测绘点位置坐标进行对比,并记录其偏差数值,将结果记录如图2、图3 所示。
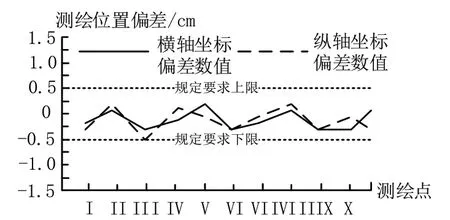
图2 本文测绘方法测绘点位置坐标偏差记录图

图 3 传统测绘方法测绘点位置坐标偏差记录图
图2 中,虚线表示各个测绘点位置横轴坐标的偏差数值;实线表示各个测绘点位置纵轴坐标的偏差数值。从上图可以看出,本文测绘方法应用后,各个测绘点的位置坐标偏差数值均控制在了规定要求的(±0.5,±0.5)cm 范围内,说明本文测绘方法的测绘精度符合建筑立面测绘精度要求。图3 为传统测绘方法测绘点位置坐标偏差图。
图3 中,虚线表示各个测绘点位置横轴坐标的偏差数值;实线表示各个测绘点位置纵轴坐标的偏差数值。从上图可以看出,利用传统测绘方法对建筑立面上各个测点进行测绘时,只有部分测绘点的位置坐标偏差在规定要求的(±0.5,±0.5)cm 范围内,绝大多数测点的偏差均超过了这一标准。因此说明,传统测绘方法在实际应用中测绘精度不符合建筑立面测绘精度要求。综合上述得出的结果证明,将三维激光扫描技术应用到建筑立面测绘方法当中能够有效提高测绘结果的精度,为后续建筑项目各项工作的开展提供更高精度的测绘立面图资源。
其次,在完成上述对测绘精度的对比后,还需要从两种测绘方法应用下测绘工作开展时的效率角度对两种测绘方法进行对比。测绘效率不仅能够直观反映应用测绘方法后测绘工作开展的水平,还能够间接反映测绘过程中各项工作是否具备开展价值。因此,基于这一特点,仍然以上述十个测绘点为例,针对各个测绘点在测绘立面图中生成的时间进行记录,通过对比测绘点生成时间,实现对测绘效率的检验,即生成时间越短,测绘效率越高;反之,生成时间越长,测绘效率越低。根据上述论述,将各个测绘点在测绘立面图中生成的时间进行记录,并绘制成表3 所示的试验结果。

表3 两种测绘方法各测绘点生成时间记录表
从上表中记录的数据可以看出,本文测绘方法生成各个测绘点的时间均在0.8~1.3 min 范围内,而传统测绘方法生成各个测绘点的时间均在5.0~6.0 min 范围内,明显本文测绘方法生成各个测绘点的时间更短。根据上述论述可以得出,本文测绘方法的测绘效率更高。
3 结语
上述研究,将三维激光扫描技术作为创新,将其应用到建筑立面测绘方法当中。在研究过程中,提出一种新的测绘方法,并对该测绘方法的应用情况进行了初步验证,同时研究过程中获得的主要研究成果包括:
(1)根据建筑立面测绘需要以及后期建筑项目各项工作任务需要,实现了对三维激光扫描立面测图方案的制定。
(2)在测图方案基础上,充分利用三维激光扫描设备和手段实现了对外业数据的采集以及预处理,为后续测绘提供了更高的精度保障条件。
(3)针对处理后的点云数据进行配准,并最终实现了对建筑立面测绘图示的生成。
(4)通过将新提出的测绘方法与传统测绘方法应用到相同的条件中,结合应用结果反馈证明,新的测绘方法测绘精度更高,并且能够在确保测绘精度的前提条件下,促进测绘效率的提高。
综合上述研究,提出的建筑立面测绘方法能够为建筑工程施工提供有效的帮助,在未来应用这一测绘方法时,三维激光扫描技术还将得到进一步的发展,并且其他技术的产生也会为其提供有利帮助,实现对建筑几何特征的真实展现。目前三维激光技术仍然是一项新型技术,还存在有待进一步完善的问题。例如,对原始数据采集时若周围干扰因素过多会造成数据数量增加,影响后续配准等。因此,在后续的研究中还将对诸如此类问题进行更深入探索。
猜你喜欢
青年文学家(2021年15期)2021-07-19
学生天地(2020年6期)2020-08-25
数学年刊A辑(中文版)(2020年2期)2020-07-25
数字技术与应用(2020年1期)2020-04-21
电子制作(2019年14期)2019-08-20
国际呼吸杂志(2019年1期)2019-01-28
中国自行车(2017年1期)2017-04-16
故事会(2016年21期)2016-11-10
黑龙江科学(2016年5期)2016-03-24
系统医学(2016年8期)2016-02-20
