
基于改进WLSSVM 的无人艇操纵性参数辨识
2023-11-18 12:13张海胜董早鹏张铮淇齐诗杰李家康
水下无人系统学报 2023年5期
张海胜 ,董早鹏 * ,杨 莲 ,张铮淇 ,齐诗杰 ,李家康
(1.武汉理工大学 高性能舰船技术教育部重点实验室,湖北 武汉,430063;2.武汉理工大学 船海与能源动力工程学院,湖北 武汉,430063;3.中国船舶集团有限公司 综合技术经济研究院,北京,100081)
0 引言
无人艇具备船型轻巧、操纵灵活、智能化等优良特点,在军事和民用领域都发挥着强大的作用,一直是近年来各国研究的热点[1]。在复杂的海洋环境中,准确的运动模型是实现无人艇精确控制的前提和保障,常见的无人艇操纵运动模型主要有整体型模型、分离型模型以及操纵响应模型[2],其中操纵响应模型结构相对比较简单,可辨识性强,对其操纵性研究具有重要意义。目前,获取无人艇运动模型参数的方法主要有经验公式法、约束模实验法及数值计算法等[3],这些方法普遍存在着一定的局限性: 经验公式法的精度难以保证;约束模实验法和数值计算法虽然精度较高,但是会耗费大量的实验成本[4]。系统参数辨识能够以较低的试验成本获得较好的辨识建模精度,具有广阔的应用前景。
近年来,传统的船舶模型参数辨识方法主要有最小二乘类算法[5-9]、极大似然法[10-11]以及卡尔曼滤波法[12-14]等。从船舶运动系统辨识方法的发展趋势来看,由于噪声敏感性、参数漂移等传统辨识方法存在的问题,机器学习辨识方法和各种改进算法是当前的研究热点[15],许多新算法已被成功应用,包括支持向量机(support vector machine,SVM)及其改进算法[16-21]。
文献[16]基于SVM 和最小二乘支持向量机(least squares SVM,LSSVM)对船舶操纵与横摇运动的耦合响应模型进行了辨识,经过仿真验证,所得响应模型和辨识方法具有良好的预测能力和泛化性能;文献[17]提出了一种v-SVM 系统辨识建模方法,该方法能够自动控制支持向量的个数,从而保证解的稀疏性,同时可以缓解噪声引起的参数漂移或过拟合等问题对模型可靠性的影响;文献[18]提出了一种最优截断LSSVM,并对船舶分离型模型进行了辨识,通过降低核矩阵的维数成功地减小了参数的不确定性,且计算量小;文献[19]使用最优截断LSSVM 对船舶操纵响应模型的参数进行辨识,并在此基础上讨论了浅水对船舶操纵模型参数的影响;文献[20]采用人工蜂群算法对SVM 的结构参数进行了优化和分配,提高了SVM 辨识方法的全局寻优能力;文献[21]提出一种多新息在线的 LSSVM 辨识建模方法,可准确拟合船舶操纵运动的2 阶非线性响应模型。
作为SVM 的一种改进方法,LSSVM 具有算法简单、求解速度快等优势[22]。在LSSVM 的结构中,偏置b是产生回归误差的主要原因,针对这一问题,文献[22]对偏置b进行了约束,文献[23]推导出了无偏置的LSSVM,改进后LSSVM 的建模精度均得到了提升。文中研究了LSSVM 及无人艇2 阶响应模型的结构,提出了一种新的解决思路,在辨识模型的输入和输出上添加相同的余弦信号,在不改变原有参数对应关系的同时,将模型中的常数项转化为新模型的系数;加权最小二乘支持向量机(weighted least square SVM,WLSSVM)权值函数的系数 ψ对其参数辨识建模精度有着直接的影响。一般可以通过对SVM 类算法的惩罚因子进行寻优[24-26],以达到最佳的辨识效果。由于WLSSVM 的特性,除了可以对其惩罚因子进行寻优外,还可通过改变其权值来影响其辨识建模精度,为了进一步提升辨识建模精度,文中提出了一种变异自适应粒子群(adaptive particle swarm optimization,APSO)算法对WLSSVM 的权值进行寻优,并进行了无人艇20°/20°Z 形仿真实验和15°/15°实船操舵试验;以20°/20°Z 形仿真实验获得的数据作为训练集和测试集进行参数辨识建模,将10°/10°Z 形操纵仿真实验和10°回转运动仿真实验获得的数据作为验证集对所建立模型的泛化能力进行检验,通过将艏向角和艏向角速度的预报值与数据采集得到的值进行对比,验证了文中方法的有效性。按同样的思路,以实船试验数据作为训练集和测试集,对所提算法进行了验证。
1 无人艇操纵运动辨识模型构建
无人艇操纵响应模型的实质是操舵与艏摇之间的响应关系,其2 阶非线性响应模型的形式为
式中:K、T1、T2和T3为操纵性指数;β为非线性项系数;r为艏向角速度;δ为舵角;δr为压舵角,是为保持无人艇直航对舵角进行的修正。为了方便求解,需要对式(1)进行离散化。采用前向欧拉差分法对、以及进行离散差分,将差分过程代入式(1),移项得到
式中,h为欧拉差分的步长。
将式(2)写成矩阵形式,即可得到结构为Y=θH的辨识模型,具体表达式为
2 基于权值寻优的WLSSVM 参数辨识建模
2.1 基于LSSVM 的参数辨识建模
LSSVM 在SVM 的基础上利用最小二乘误差对所有数据进行拟合,把非线性建模过程转化为求解线性方程组,使得求解过程更加简便高效。使用线性回归函数对式(3)的辨识模型进行拟合,可得
式中:w为权值向量;φ(x)为非线性映射函数;b为偏置;i=1,2,···,l,l为数据长度。
LSSVM 对应的优化问题可以表示为
式中,C为惩罚因子。根据代价函数(5)及其约束条件,应用凸二次规划理论,可以推导出其Lagrange函数为
式中:I1=[1,···,1]1×lT;I2=diag(I1);Y=[Y(1),···,Y(l)]T;α=[α(1),···,α(l)]T;Ω为LSSVM 的核函数,使用线性核进行LSSVM 的参数辨识,可得
解方程组(7),可以得到Lagrange 乘子 α和偏置b的值,最终得到新的输出模型
当偏置b→0时,有
由式(3)和式(11)可以解出
2.2 基于余弦处理的辨识模型重构
在使用LSSVM 算法进行辨识建模时,虽然理论上假设b→0,但是在实际情况下偏置b并不会为零;当LSSVM 算法用于带常数项模型的参数辨识时,偏置b的存在会对常数项的辨识精度造成显著影响,这是LSSVM 算法对模型参数 δr的辨识不精确的原因。针对这一问题,在辨识模型,即式(3)中添加周期性的附加信号g(·)对模型进行重新构造,新辨识模型在不改变原有辨识模型参数对应关系的情况下,消除了模型中的常数项,即
式中:g(·)设计为g(t)=Acos(t)+p,A为余弦信号的幅值,p为非常小的正数,取A=10,p=10-20。
2.3 基于变异APSO 寻优权值的WLSSVM 参数辨识建模
2.3.1 WLSSVM 辨识建模
在实际中可以通过权值大小来体现不同数据点的重要程度,这种引入加权思想的LSSVM 算法即为WLSSVM,其优化问题可以表示为
式中,µ(i)∈[0,1]为针对不同样本的权值,µ(i)越大说明样本越重要。数据点的Lagrange 乘子 α(i)越大,对模型的影响越大,故采用下式确定权重
式中,η ∈[0,1]为权值系数,可以看出,当 η=1时WLSSVM 与LSSVM 等价。
类似的,WLSSVM 模型对应的KKT 系统可以描述为线性方程组的形式,即
求解式(16),可得WLSSVM 的Lagrange 乘子和偏置的值,按同样的思路,可以解得WLSSVM的参数辨识结果
2.3.2 基于变异APSO 的WLSSVM 权值寻优
在APSO 算法中,每个粒子位置和速度根据如下方程进行更新[27]
式中: ω为惯性权重;v为粒子速度;t为当前迭代次数;Pbest为个体最优位置;Gbest为种群最优位置;c1,c2为常数,取c1=1.8,c2=1.2;r1,r2∈[0,1]为随机数。
惯性权重的自适应更新方程为
式中:N为最大迭代次数;ωmin和 ωmax分别为惯性权重的最小值和最大值,取 ωmin=0.4,ωmax=0.8。
文中粒子的位置x即为η的取值,适应度函数设计为WLSSVM 的拟合误差,当粒子群收敛到使得拟合误差最小的位置x,即得到最优的η。
若粒子在寻优初始状态就处于较优位置,那么粒子在寻优时大概率会陷于局部最优状态。针对这一问题,引入变异策略对APSO 算法进行优化:在每次迭代时,每一个粒子都有概率变异,当Rrand1≥k时,即对该粒子进行变异处理,于是式(19)优化为
式中:xmin和xmax分别为粒子取值范围的最小值和最大值,取xmin=0,xmax=1,k=0.9;Rrand1,Rrand2∈[0,1]为随机数。
变异APSO 算法寻优的主要步骤如下:
1) 初始化。在迭代开始前,选择合适的种群数量(设为20)以及迭代次数(取N=50),然后根据η的取值范围随机选取各粒子的位置和速度,限制vmin=-1,vmax=1;
2) 计算各粒子的适应度值;
3) 对各粒子的适应度值与个体历史最优位置Pbest的适应度值进行比较,Pbest将更新为适应度值更小者当前所在位置;
4) 找出当前种群的最优位置与种群历史最优位置Gbest,对比两者的适应度值,Gbest更新为适应度值更小者的位置;
5) 粒子的速度信息按式(18)进行更新,惯性权重变化方式依照式(20),位置则依照式(21)迭代;
6) 在迭代次数未超过N=50时,返回步骤2);超过之后则跳出循环,输出Gbest和其对应的适应度值。
当权值系数 η=Gbest时,WLSSVM 的辨识建模达到最高精度。
3 算法验证
3.1 仿真实验数据验证
3.1.1 仿真实验数据采集
采用了文献[6]中某船舶的2 阶非线性响应模型参数,如表1 所示。由于Z 形操纵运动更能够体现无人艇的操纵性,故基于Matlab 平台,采用4 阶龙格-库塔法进行了20°/20°Z 形操纵运动仿真实验,仿真总时间为50 s,采样步长为0.05 s;艏向角 ψ、舵角 δ以及艏向角速度r数据见图1。

图1 20°/20°Z 形操纵运动仿真实验数据Fig.1 Simulation experimental data of 20°/20° zigzag maneuvering motion

表1 船舶模型参数Table 1 Ship model parameters
3.1.2 基于仿真实验数据的参数辨识结果
基于20°/20°Z 形仿真实验数据对所提出的算法进行了验证。仿真数据中,取惩罚因子C=108。图2(a)和图2(b)分别为辨识模型重构前后变异APSO 对WLSSVM 权值系数 η的寻优过程。辨识模型重构前后基于LSSVM 的参数辨识结果,以及辨识模型重构前后基于变异APSO 寻优权值的WLSSVM 参数辨识结果见表2。

图2 基于仿真数据的变异APSO 寻优Fig.2 Optimization of mutation APSO based on simulation data

表2 基于仿真数据的参数辨识结果Table 2 Parameter identification results based on simulation data
可以看到,应用变异APSO 的WLSSVM 算法能够快速收敛至最优的权值系数η,使得其辨识效果达到最佳。由于对原始辨识模型寻优的WLSSVM权值系数 η为1,所以原始模型+LSSVM与原始模型+变异APSO-WLSSVM 的效果是等价的,参数辨识结果相同。通过上述基于20°/20°Z 仿真数据的辨识结果可以看出,LSSVM 算法对参数 δr的辨识是不准确的,参数相对误差达到了100%;辨识模型经过余弦信号重构之后,δr的估计误差降至0,参数 α的辨识误差也大大降低,由8.64%降至0.81%。由模型重构+变异APSO-WLSSVM 与模型重构+LSSVM 的参数辨识结果可以看出,结合变异APSO 算法寻优的WLSSVM与LSSVM 相比,参数的辨识误差整体上有一定程度的降低,参数辨识精度提高。
基于表2 的参数辨识结果,使用4 阶龙格库塔法对参数辨识所建立的各个模型进行艏向角及艏向角速度预报。模型改进前后LSSVM 的预报结果如图3 所示。

图3 基于LSSVM 的艏向角及艏向角速度预报Fig.3 Prediction of bow angle and bow angular velocity based on LSSVM
均方根误差(root mean square error,RMSE)是衡量数据预测误差的常用指标,能够很好地体现数据的离散程度。其计算公式为
式中:yi为测量值;为预测值;n为数据个数。
各模型艏向角及艏向角速度预报误差见表3。
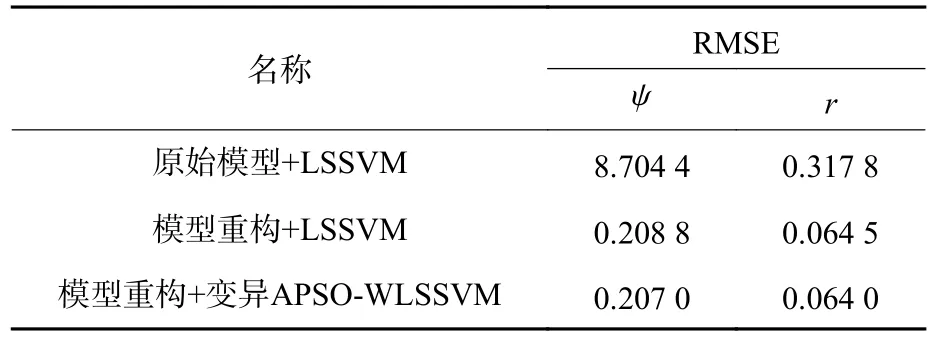
表3 基于仿真实验数据的辨识建模预报误差Table 3 Prediction error of identification modeling based on simulation experimental data
3.1.3 模型泛化性能验证
为验证模型的泛化能力,基于仿真模型以及辨识建模进行了10°/10°Z 形操纵运动仿真实验和10°回转运动仿真实验,仿真条件与上文一致,对应的艏向角速度仿真结果分别见图4 和图5。仿真预报误差见表4。

图4 10°/10°Z 形操纵运动艏向角速度仿真Fig.4 Simulation of bow angular velocity of 10°/10° zigzag maneuvering motion
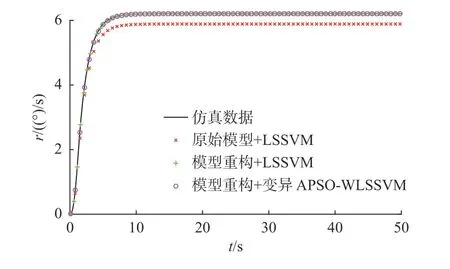
图5 10°回转运动艏向角速度仿真Fig.5 Simulation of bow angular velocity of 10° rotary motion

表4 10°/10°Z 形操纵运动及10°回转运动预报误差Table 4 Prediction error of 10°/10° zigzag maneuvering motion and 10° rotary motion
通过上述各辨识建模的预报结果可以看到:辨识模型经过重构之后,艏向角及艏向角速度的RMSE 大大降低;对于基于变异APSO 算法进行权值寻优的WLSSVM,其艏向角及艏向角速度的RMSE 相较于LSSVM 得到了进一步降低,但是提升效果并不明显,这是因为文中仿真实验数据中,测量值即为真实值,相当于“优质数据”,算法的优越性得不到充分体现。无人艇在实际运动时会受到各种干扰,数据的测量值相对于真实值会有偏差,故仿真数据不能完全代表无人艇实际的运动状态,考虑到这一点,采集实船试验数据对所提出算法的鲁棒性进行验证。
3.2 实船试验数据验证
3.2.1 实船试验数据采集
为了验证所提算法,文中对1 艘喷水推进无人艇开展了实船试验。辨识建模所需数据为艏向角、艏向角速度以及舵角,艏向角速度由惯性测量单元测得,艏向角由艏向角速度积分得到,舵角由舵机反馈得到。实艇试验工况为15°/15°操舵试验,具体试验方案为: 无人艇在额定航速下,以15°的舵角行驶50 s,然后再以-15°舵角行驶相同的时间,为了避免偶然现象,试验重复进行4 次,传感器采样频率为0.05 s。在试验数据中选取了第0~150 s 的数据用于无人艇运动模型参数辨识建模。无人艇部分参数如表5 所示。

表5 无人艇部分参数Table 5 Parameters of the USV
3.2.2 基于实船数据的参数辨识结果
对于实船数据,取惩罚因子C=1010。参数辨识结果见表6。变异APSO 算法的寻优过程如图6 所示。

图6 基于实船试验数据的变异APSO 寻优Fig.6 Optimization of mutation APSO based on actual ship test data

表6 基于实船数据的参数辨识结果Table 6 Parameter identification results based on actual ship data
实船的舵角数据见图7,以其作为输入,基于表6 的参数辨识结果,对无人艇艏向角及艏向角速度进行预报,预报结果如图8 所示,相对于实船试验数据的预报误差如表7 所示。

图7 实船舵角数据Fig.7 Rudder angle data of an actual ship
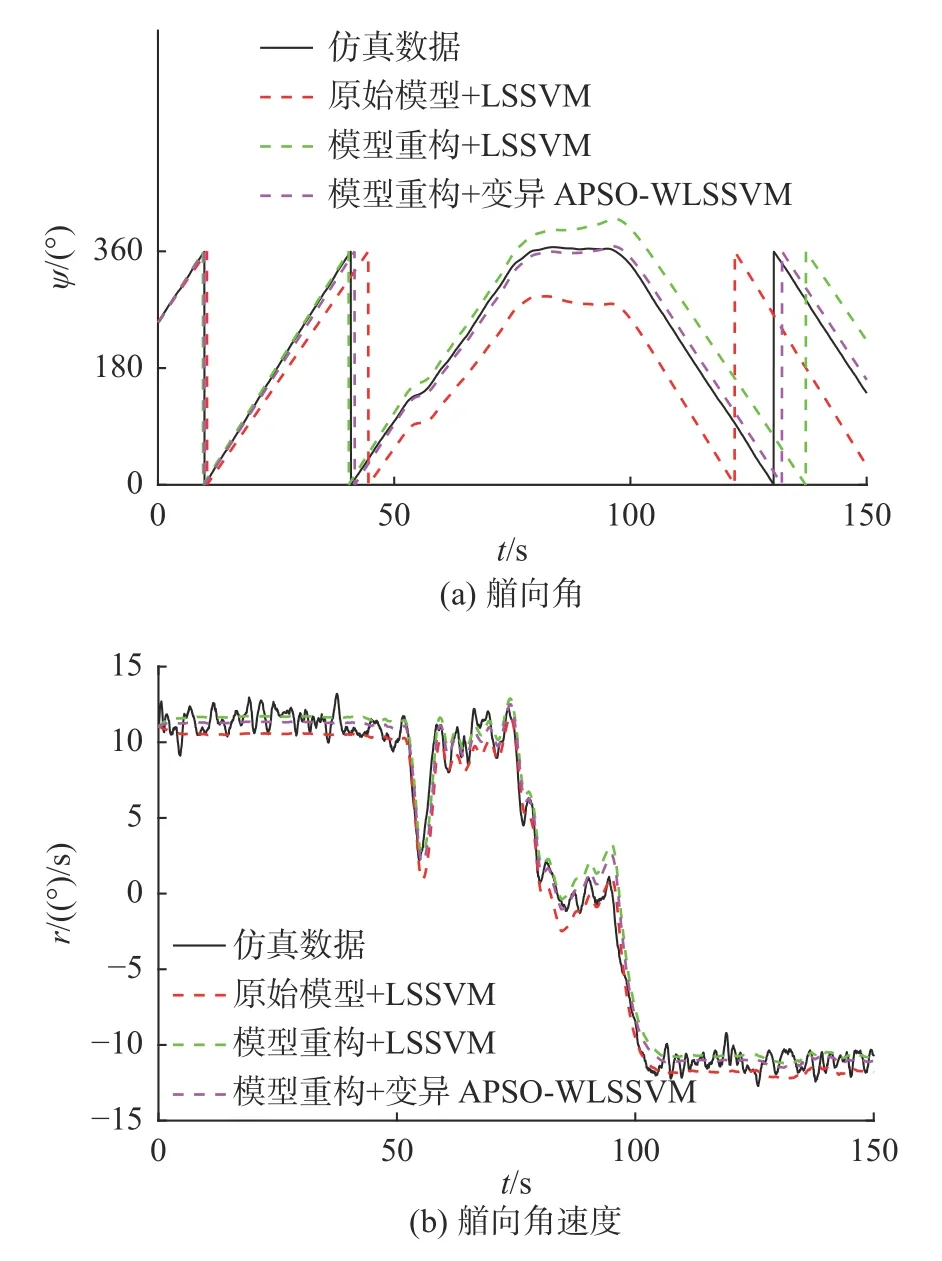
图8 基于实船数据的艏向角及艏向角速度预报Fig.8 Prediction of bow angle and bow angular velocity based on actual ship data

表7 基于实船试验数据的辨识建模预报误差Table 7 Prediction error of identification modeling based on actual ship experimental data
从图8 可以看出,对于实船试验数据,辨识模型余弦重构措施同样非常有效;不同于仿真数据,基于变异APSO 寻优权值的WLSSVM 预报精度相对于LSSVM 则有较大提升,表7 中艏向角和艏向角速度预报误差也证明了这一点,所提算法的鲁棒性得到了检验。
4 结束语
基于LSSVM 对无人艇2 阶非线性响应模型进行了研究,提出的辨识模型余弦重构方法,有效解决了LSSVM 对模型中常数项 δr辨识不准的问题,同时其他参数的辨识精度也得到了提升,可以为LSSVM 辨识此类模型提供参照;在辨识模型重构的基础上,结合变异APSO 寻优权值的WLSSVM算法,可以快速寻找到最佳的权值系数,能够进一步提升LSSVM 算法的辨识建模精度,且更具鲁棒性。研究结果可为通过参数辨识方法建立高精度的无人艇运动模型提供参考。
猜你喜欢
舰船科学技术(2023年7期)2023-05-10
成都信息工程大学学报(2022年3期)2022-07-21
沈阳师范大学学报(教育科学版)(2021年2期)2021-02-01
船海工程(2019年6期)2019-12-25
中国航海(2017年3期)2017-11-03
中学生数理化·高一版(2017年3期)2017-07-08
自动化学报(2017年7期)2017-04-18
火控雷达技术(2016年1期)2016-02-06
中国铁道科学(2015年4期)2015-06-21
空间控制技术与应用(2009年2期)2009-12-20
