
履带式微型海底钻机行驶动力学建模与分析①
2023-11-16 10:50:26李嘉豪金永平刘德顺万步炎
矿冶工程 2023年5期
李嘉豪, 金永平, 刘德顺, 万步炎
(湖南科技大学海洋矿产资源探采装备与安全技术国家地方联合工程实验室,湖南 湘潭 411201)
浩瀚的大洋底部蕴藏着丰富的矿产资源,利用海底钻机对深海沉积物进行钻探取芯并钻获高质量的岩芯样品,是探明深海海底矿产资源赋存状况的前提和基础。 开发一种拥有履带式移动功能的微型海底钻机,在海底矿区实现多点位钻探取芯,具有重要的应用前景[1-3]。 履带式车辆在海底行驶过程中,受到海底底质特别是稀软底质的影响,容易出现沉陷、打滑等问题,海底底质的弹塑性变形是导致履带车产生沉陷的主要因素[4]。 履带式微型海底钻机行驶性能的好坏直接决定着钻探作业能否连续高效地进行。
本文首先概述履带式微型海底钻机作业过程、组成结构;然后应用软件Recurdyn 构建履带式微型海底钻机多体动力学模型,并通过底质力学特性试验建立底质模型,对履带式微型海底钻机行驶于深海底质过程进行动力学仿真,以研究履带式微型海底钻机行驶过程动态特性及其影响因素,不仅可以为履带式微型海底钻机的结构优化和行驶控制提供理论依据,而且能为履带式海洋工程装备的优化设计及安全操作提供参考。
1 履带式微型海底钻机动力学建模
1.1 履带式微型海底钻机
履带式微型海底钻机作业流程如图1 所示。 首先,大型科学考察船(母船)将履带式微型海底钻机运载到目标矿区海域并进行动力定位;然后,钻机搭载中继器由母船绞车缓慢下放,在下放至一定深度后,中继器绞车释放钻机,并在离底合适的高度自由下落实现着底。 履带式微型海底钻机钻探取芯作业完成后,依靠二级绞车将钻机及其岩芯样品回收到母船。
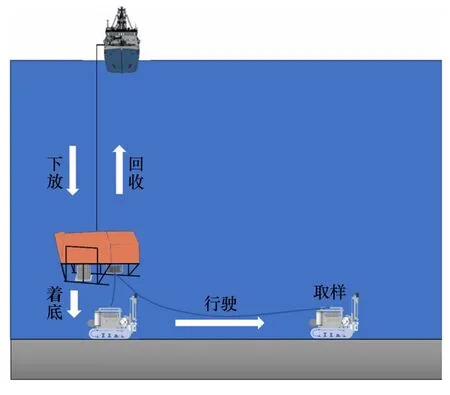
图1 履带式微型海底钻机工作流程
履带式微型海底钻机由车架、多点位取样装置、履带底盘及液压装置组成。 履带式微型海底钻机的车架安装于履带架上,提供与脐带缆的连接和各种设备的装配;多点位取样装置安装于车架的前端,它能实现海底多点位快速取样以提高有效样品率;液压装置安装在车架后端凹槽内,为整车的移动和钻探取样提供动力;履带底盘是钻机的行驶装置,以履带架为主体,履带架的两侧分别设有一组引导轮、托轮、支重轮、传动轮及行驶马达,传动轮与行驶马达的输出轴连接,轮系外部包绕有一圈履带,以适应深海底质的行驶要求。钻机主要设计结构参数如表1 所示。
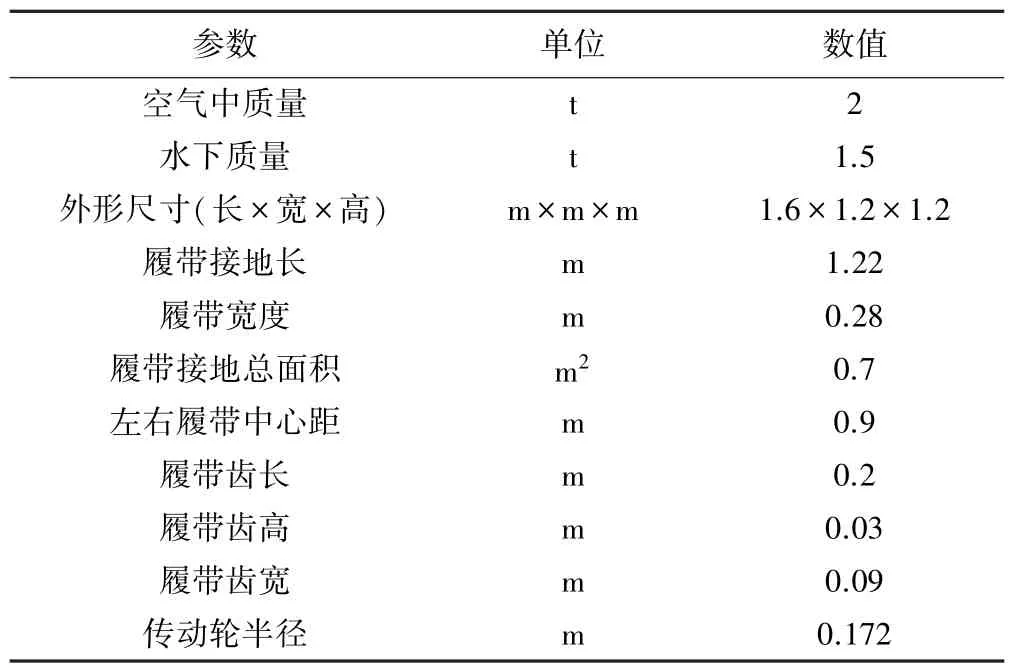
表1 履带式微型海底钻机技术参数
1.2 履带式微型海底钻机多体动力学建模
考虑到履带式微型海底钻机结构复杂,难以通过数学方程建立其多体动力学模型,故采用多体动力学仿真软件Recurdyn 来构建模型。 Recurdyn 采用相对坐标系运动方程理论和完全递归算法,非常适合求解大规模的多体系统动力学问题,且Recurdyn 软件中的低速履带车模块对建立履带底盘模型以及研究履带与底质间作用关系非常有利。
首先,将完整的履带式微型海底钻机三维模型导入到Recurdyn 中,并将除履带底盘外的其他机构合并为整体;其次,在Recurdyn 自带的低速履带车Track(LM)模块中重新对各轮系部件以及履带进行参数化建模,并完成履带底盘的重新装配;然后,设置各个履带板间衬套力的刚性和阻尼系数,并添加履带底盘各结构之间的约束关系;最后,添加各轮系的运动副并设置传动轮的驱动速度,完成履带式微型海底钻机的初步建模。
在构建地面底质力学模型时,首先在软件中绘制路面模型,然后添加履带与地面底质的接触关系,最后设置所需模拟底质的力学特性参数,这样即可得到履带式微型海底钻机在海底底质状况行驶时多体动力学仿真模型,如图2 所示。
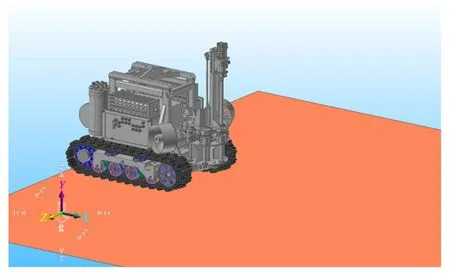
图2 履带式微型海底钻机多体动力学仿真模型
1.3 深海底质模型及其参数
Recurdyn 中的履土相互作用关系是基于Bekker压载沉陷理论和J-H 剪切应力-剪切位移模型表征的。履带式微型海底钻机行驶时履带与底质的相互作用特性难以直接通过原位试验测得,故采用实验室模拟试验方法测量深海底质的力学特性参数,其中底质样品为某海域水深2000 m 左右的深海海底沉积物。
履带板与底质的相互作用力学特性可以分解为剪切应力-剪切位移特性和压力-沉陷特性。 底质剪切特性通过三轴试验测定,得到沉积物样品的内摩擦角约4°,黏聚力为12.715 kPa。 底质压力-沉陷特性试验原理如图3 所示,试验所用模拟履带板规格分别为板A(390 cm×115 cm)和板B(400 cm×95 cm)。 试验开始时,模拟履带板受到法向压力p的作用,以V=4 mm/s的速度匀速向下压陷60 mm,过程中由位移传感器记录压陷深度,由压力传感器同步记录到达某一深度所需压力,最后绘制成压力-沉陷曲线,如图4 所示。
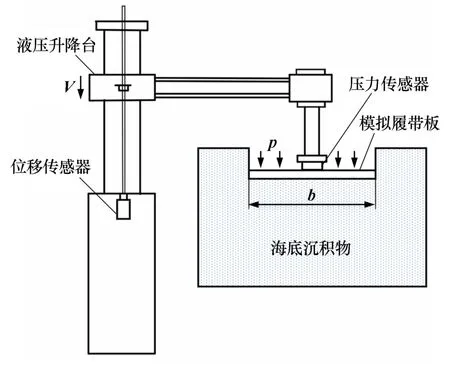
图3 压力-沉陷试验原理
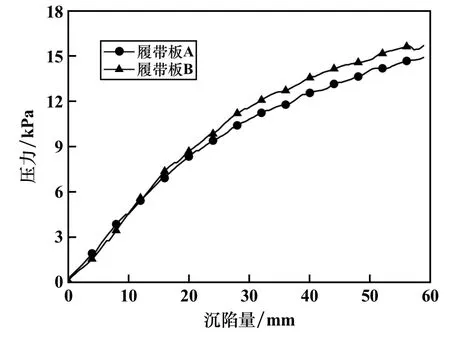
图4 压力-沉陷试验曲线
根据Bekker 压力-沉陷关系式[5]:
式中p为法向接地压力,kPa;kc为内聚变形模量,kN/mn+1;kφ为内摩擦变形模量,kN/mn+2;b为接触面宽度,m;z为沉陷量,m;n为沉陷变形指数。
不同海域沉积物不同,形成的底质力学特性不同。基于式(1),参考文献[6-11],可以初步确定履带式微型海底钻机目标矿区海底底质kc,kφ和n大致范围为:0.1~100 kN/mn+1,0.01~1000 kN/mn+2,0~2。 一般来说,n>1 时属于硬实底质,n<1 属于稀软底质。
2 履带式微型海底钻机行驶动态仿真分析
2.1 履带式微型海底钻机行驶移动过程分析
为了考察履带式微型海底钻机行驶过程的动态行为,设定传动轮速度为0.5 m/s 来模拟其在深海海底的行驶移动过程,底质参数由试验测得。 履带式微型海底钻机启动后行驶速度、质心纵向位移和仰角变化曲线如图5 所示,钻机质心纵向位移代表钻机的沉陷深度。
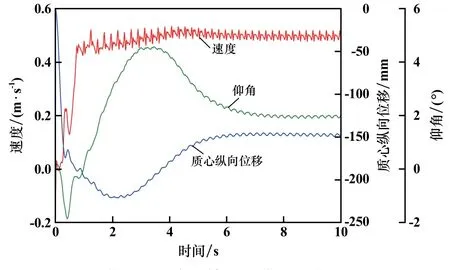
图5 履带式微型海底钻机行驶过程动态行为曲线
从图5 可以看出,履带式微型海底钻机从启动开始,经历了一个复杂变化过程后趋于稳定。 钻机开始处于静止状态,启动后速度在1 s 内迅速提高,由于深海底质的流变特性,沉陷深度随着钻机的运动逐渐增大,并在2 s 左右达到最大深度,为220 mm,但随着底质对履带逐渐形成有效的支持力,钻机沉陷深度在2~6 s 内逐渐减小;同时,钻机仰角在达到最大值4.56°后逐渐减小。 6 s 后钻机行驶速度、沉陷深度和俯仰角均趋于稳定,钻机行驶速度在0.49 m/s 左右波动,滑移率约为2%;沉陷深度稳定在150 mm 左右,仰角稳定在2°左右。
根据国内外经验,当沉陷量达到车轮半径后将会严重影响车辆行驶移动性能,因此定义沉陷量等于车轮半径为临界沉陷量[12]。 履带式微型海底钻机履带传动轮半径为172 mm,从仿真结果来看,钻机稳定行驶的沉陷深度小于其临界沉陷量,表明履带式微型海底钻机在该海域沉积物底质区域正常运行。
2.2 深海底质力学特性参数对钻机动态行为的影响
为了考察海底底质对履带式微型海底钻机滑移率、沉陷量和仰角等动态行为的影响,设置不同的底质力学特性参数进行履带式微型海底钻机行驶移动过程动力学仿真,结果如图6 所示。
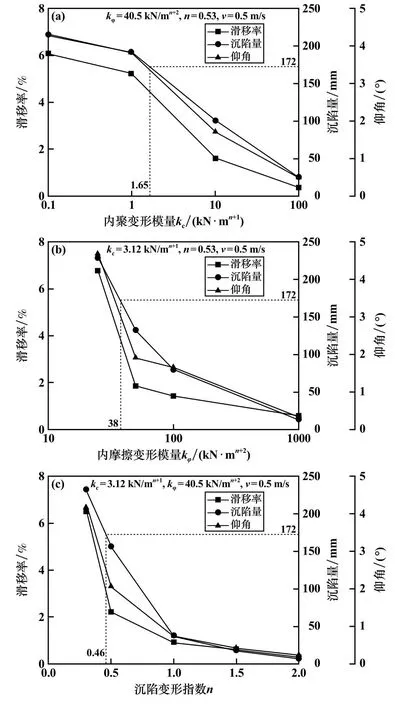
图6 滑移率、沉陷量、仰角与底质力学特性参数的关系
从图6 可以看出,钻机稳定行驶时的滑移率、沉陷量、仰角均随底质内聚变形模量、内摩擦变形模量增大而减小,但减小的量级不大:当内聚变形模量和内摩擦变形模量变化2~3 个数量级时,滑移率、沉陷量、仰角均在一个数量级内变化;底质的沉陷变形指数对钻机的滑移率、沉陷量、仰角影响较为明显,且对于n>1 的硬实底质和n<1 的稀软底质明显不同,稀软底质变化更为显著一些。 从仿真结果来看,为了保证履带式钻机正常行驶,沉陷深度必须小于其临界沉陷量,如图6(b)中内摩擦变形模量小于25 kN/mn+2,或当图6(c)中沉陷变形指数小于0.3 时,钻机将产生巨大沉陷,这均表明此种底质已不适合钻机行驶通过。 由此可知,在面向海底底质极其稀软的海域勘探作业时,履带式微型海底钻机设计可能需要考虑增加履带接触面,减小接触压力,以便其在海底稀软底质移动作业。
2.3 行驶速度对钻机动态行为的影响
为了考察行驶速度对履带式微型海底钻机动态特性的影响,设置不同的履带行驶速度,分别开展了深海海底稀软底质条件(底质内聚变形模量3.12 kN/mn+1,内摩擦变形模量40.5 kN/mn+2,沉陷变形指数0.53)和陆地黏性底质条件(底质内聚变形模量13.2 kN/mn+1,内摩擦变形模量692.1 kN/mn+2,沉陷变形指数0.5)的仿真分析,在陆地、深海两种底质下钻机行驶特性与行驶速度的变化关系如图7 所示。
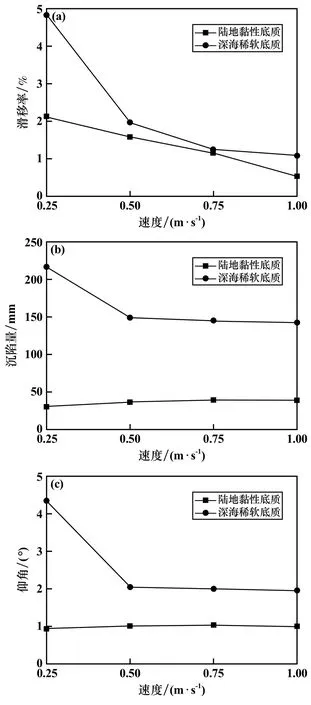
图7 滑移率、沉陷量、仰角与钻机行驶速度的关系
由图7 可知,对于陆地黏性底质,履带式微型海底钻机稳定行驶时的滑移率随行驶速度增大而减小,且与行驶速度近似成线性相关;钻机沉陷量与仰角随行驶速度增加没有明显变化。 对于海底稀软底质,履带式微型海底钻机稳定行驶时的滑移率、沉陷量、仰角等明显高于陆地黏性底质,且滑移率、沉陷量、仰角等均随行驶速度增大而减小,在行驶速度低于0.5 m/s 时变化明显,行驶速度高于0.5 m/s 时沉陷量、仰角几乎不变。 这表明,为了避免陷入底质而导致不能正常行驶,一方面要求履带式微型海底钻机行驶速度高于0.5 m/s,另一方面要求深海海底作业行驶时,履带式微型海底钻机以较高速度通过稀软底质区域。
3 结论
1) 根据履带式微型海底钻机结构设计,应用Recurdyn 软件构建了履带式微型海底钻机的多体动力学仿真模型,根据试验构建了底质力学模型,并对钻机行驶过程进行了仿真分析。 结果表明,履带式微型海底钻机稳定行驶时会产生一定的滑移与沉陷,且能够在某特定深海沉积物底质区域安全行驶。
2) 履带式微型海底钻机行驶移动过程动力学仿真结果表明,海底底质力学特性参数对履带式微型海底钻机行驶特性有着不同程度的影响,内聚变形模量、内摩擦变形模量影响较小,沉陷变形指数影响明显,特别是稀软底质影响较大,为了避免沉陷过深而不能正常行驶,履带式微型海底钻机设计时应尽可能增大接地面积,以适应不同海域底质的作业情况。
3) 履带式微型海底钻机行驶移动过程动力学仿真结果表明,履带式微型海底钻机行驶速度低于0.5 m/s时对其行驶特性影响明显,行驶速度高于0.5 m/s 时对其行驶特性影响较小。 为了避免陷入底质不能正常行驶,一方面要求履带式微型海底钻机行驶速度高于0.5 m/s,另一方面要求钻机以较高速度通过稀软底质区域。
猜你喜欢
中学生数理化·八年级物理人教版(2023年4期)2023-05-05 07:29:32
水生生物学报(2022年6期)2022-07-08 09:31:56
海洋通报(2022年2期)2022-06-30 06:06:28
海洋通报(2021年1期)2021-07-23 01:55:24
中国石油石化(2021年8期)2021-03-30 12:39:14
初中生世界·九年级(2020年2期)2020-04-10 06:47:22
石油化工建设(2019年6期)2020-01-16 08:03:42
海洋渔业(2017年5期)2017-11-07 02:34:58
科技视界(2016年15期)2016-06-30 12:48:10
橡胶工业(2015年4期)2015-02-23 23:29:38
