
基于HSV 空间融合Retinex 算法的全天候运动目标检测①
2023-11-16 10:54:38黄俊杰包嘉琪秦亚光
矿冶工程 2023年5期
陈 卡, 黄俊杰, 包嘉琪, 秦亚光
(1.广西中金岭南矿业有限责任公司,广西 来宾 546100;2.武汉纺织大学计算机与人工智能学院,湖北 武汉 430200;3.中南大学资源与安全工程学院,湖南 长沙 410083)
矿业生产过程中,存在箕斗挂钩脱落的问题。 挂钩脱落会产生安全隐患并造成经济损失,实时监测箕斗挂钩状态尤为重要。 传统的运动物体检测方法主要有3 种:背景减差法、光流法和帧间差分法[1]。 夜间照明状态下,因气候环境、亮度状况、拍摄器材等原因,被拍摄画面对比度很低、动态范围压缩很大,会出现色彩退化、偏色等问题,导致无法检测到标志物。 且传统图像增强算法会在增强后使图片出现失真、光晕、边缘模糊和间接修改图像等现象[2]。
基于生产现场环境复杂性,需要用到非接触式的脱钩检测系统。 考虑矿山设备实际情况,本文提出一种基于HSV 色彩空间融合Retinex 算法的全天候运动目标检测方法,通过选取一种特殊的标志物,将运动挂钩识别转换为对标志物的检测与跟踪,采用文献[3]中的一种全局自适应的低照度图像恢复算法来应对夜间等低照度情况下的标志物识别。 该技术可以有效提取运动目标,受背景影响小,适用于不同光照环境,对目标特征提取准确性高、时效性强。
1 流程构建
1.1 HSV 色彩空间
摄像头所采集的颜色模型是RGB 颜色模型,对光线变化较为敏感,为了达到不同时段采集的效果,将RGB 颜色模型转换为HSV 空间模型。 如图1 所示,HSV 模型是包括色调(H)、饱和度(S)和明度(V)的一种颜色空间[4-5]。 色调H 表示颜色的基本内容,也就是颜色本身,如红色、绿色、蓝色等。 饱和度S 代表颜色的纯度。 明度V 指的是色彩的明亮程度,与光亮环境有关,通过明度调节可以在不同环境下采集到目标物。 在户外作业时,通过HSV 空间,可以应对全天候脱钩检测任务,在复杂作业环境下可简化目标图像,达到识别标准。
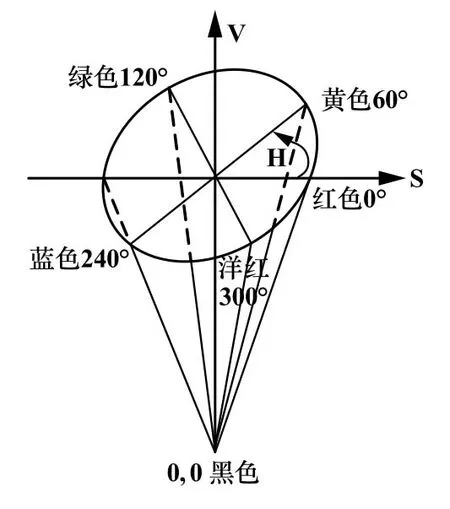
图1 HSV 空间模型
1.2 算法流程
基于HSV 空间融合Retinex 算法的全天候运动目标检测流程如图2 所示。
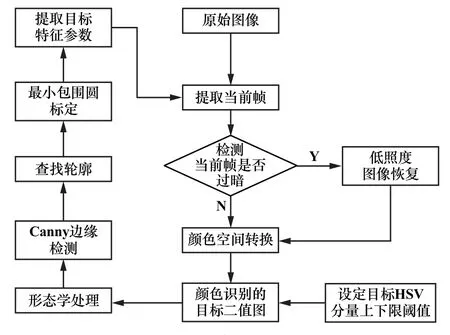
图2 算法流程
2 运动目标检测
2.1 明暗度检测
一般夜间图片的灰度值在30 以下,可以依据视频图像灰度图分布情况判断图像是否过暗。 若灰度值30 以下点所占百分比小于阈值,则对图像进行低照度图像恢复算法。 图3 为明暗两幅视频图像灰度直方图结果。 由图3 可以看出,光线充足和光线不充足情况下的灰度直方图有显著区别。 光线充足条件下灰度值30 以下点所占比例为6.1%,光线不充足条件下灰度值30 以下点所占比例为17.4%。 多次试验对比后,将阈值定为10%,即灰度值在30 以下占比超过10%时,对图像进行低照度图像恢复。
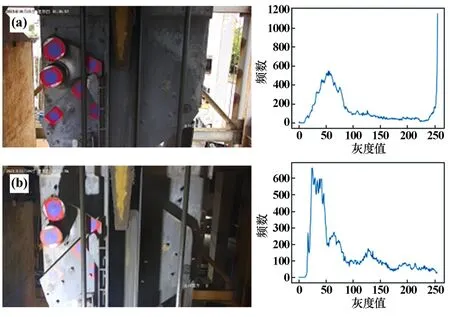
图3 不同光线条件下的明暗度灰度直方图
2.2 基于Retinex 的低照度图像恢复算法
2.2.1 Retinex 模型
Retinex 理论[6]为:物质的色彩由物质对长波(红)、中波(绿)和短波(蓝)光的反射强度确定。 Retinex 理论以色彩统一性(颜色恒常性)为前提。 Retinex 模型如图4 所示。
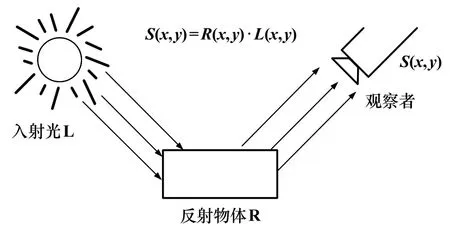
图4 Retinex 模型
Retinex 理论表达式为:
式中L(x,y)为入射光图像;R(x,y)为事物的反映特性图像,即图像的内部特征;S(x,y)为人眼所能接受到的最佳反映光图像。 Retinex 理论的基本思路是在原始图像中,采用一定方式消除甚至减少对入射图像的影响,以便于尽可能保持事物本身的反映特征图像。其算法流程过程如图5 所示。
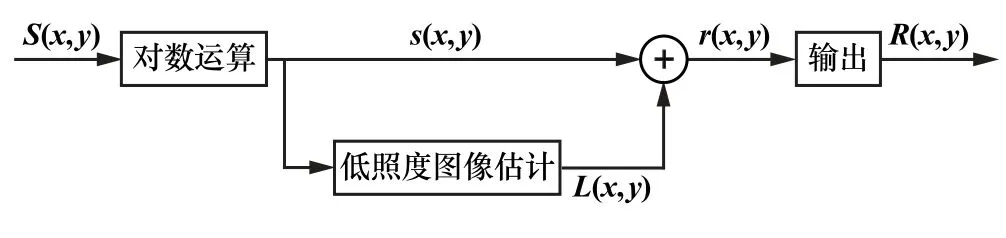
图5 Retinex 算法流程
由此可得单尺度Retinex 算法(SSR 算法)[7]的公式为:
式中r(x,y)为输出图像;F(x,y)为中心环绕函数,可表示为:
式中c为高斯环绕尺度;λ为一个尺度,它的取值必须满足:
从式(5)可以看出,单尺度Retinex 算法是对入射图像进行估计,并预测图像中物体亮度的改变,然后再将它们消除,最后仅留下其对物体的反光特征,并以此达到增强的目的。
2.2.2 多尺度Retinex 算法(MSR 算法)
为克服单尺度Retinex 算法的局限、更有效地实现高保真性和对图像动态范围的压缩,推导出了多尺度Retinex 算法[8],其公式为:
式中K为高斯中心环绕函数的个数,通常K取3;且ω1=ω2=ω3。
MSR 算法虽然能更好地保持高保真度和对图像动态范围的压缩,但跟SSR 算法一样,R(x,y)是对数域的输出,要转化为数码图像,需要将它们量化为[0,255]的数码图像类型。 在量化过程中,图像可能会因为增加了噪声而出现局部细节色彩失真,因此在灰度拉伸时会使图像整体亮度偏暗。
2.2.3 基于HSV 空间融合Retinex 算法
基于Reinex 的色调映射技术[3]中的全局适应技术对低照度画面有很大的调节作用,其思想为:从待处理图像中获取亮度值。 首先使用全局色调映射预处理,再使用重构的局部色调映射,最后经归一化得到输出图像。 为了全局压缩高动态范围成像场景的动态范围,使用了式(7)所示的函数:
式中Lg(x,y)为全局自适应输出;Lw(x,y)为输入图像亮度值;Lwmax为输入图像最大亮度值;为输入亮度对数的平均值:
式中N为总像素数;δ一般是很小的数,其作用主要是为了避免对纯黑色像素进行对数计算时数值溢出,这个问题在图像处理时很常见。
2.2.4 不同算法对低照度图像的恢复效果对比
图6 为3 种算法对低照度图像的恢复情况。
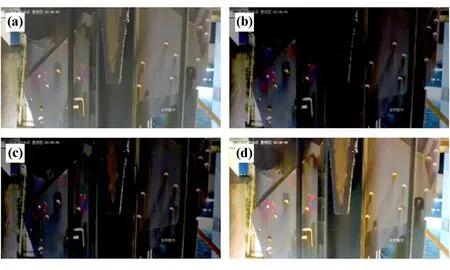
图6 不同算法对低照度图像的恢复情况
从图6 可以看出,SSR 算法和MSR 算法虽然使图像细节稍微清楚,但整体颜色偏暗,无法提取标志物。而基于HSV 空间融合Retinex 算法不仅提升了亮度,而且使图像层次分明,有利于标志物的检测与提取。
表1 是各种算法的客观评价表。 由表1 可以直观地看出,基于HSV 空间融合Retinex 算法相较于原图、SSR 算法和MSR 算法无论是均方差还是信息熵都有显著提升。 说明经过本文算法处理后的图像不会过明或过暗,图像细节更清晰,层次更丰富,更有利于标志物的检测和提取。
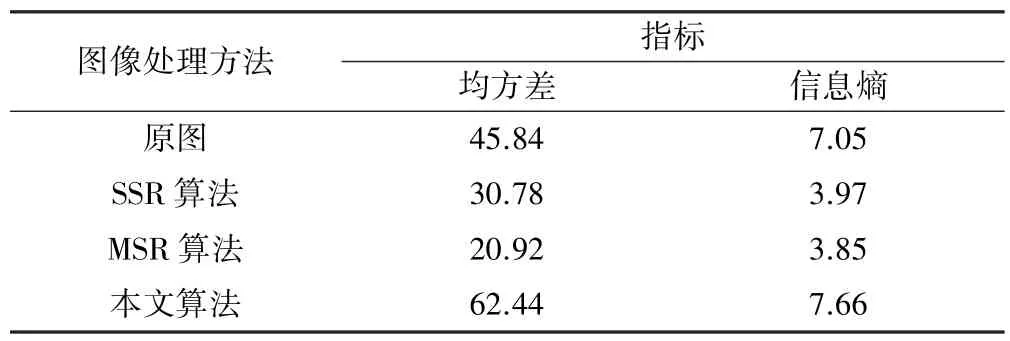
表1 各种算法客观评价表
2.3 标志物检测及最小包围圆查找
2.3.1 二值图提取
观察HSV 颜色空间中的各颜色分量可以发现:H分量可以清晰地区分标志物与背景图,适用于对背景的识别;S 分量图像中,标志物与图像其他内容的饱和度有着明显差异;V 分量在夜间有灯光情况下标志物的区分度较清晰。
通过对不同时间、不同光照环境下大量图像进行统计分析,结果显示,H 分量灰度直方图灰度值聚集在100~130 范围区间内。 由此,可以基于此阈值对HSV颜色空间的标志物图像进行像素判断,从而完成标志物与图像背景的分割操作。
2.3.2 二值图像降噪
为了消除图像数字化时所混入的噪声,保证对标志物提取的精确度,必须对提取到的二值图像进行降噪处理。 经过多次试验对比形态学操作和平滑处理,发现线性滤波如高斯滤波无法去除噪声;非线性滤波如中值滤波虽能去除噪声,但需进行排序操作,耗费时间太久;开运算[9]既可以去噪又满足实时性要求,效果显著。
2.3.3 轮廓提取及最小包围圆查找
对目标对象的二值图像去噪后,采用Canny 边缘检测法[10]检测边缘,它一个很重要的特点就是试图把独立的候选图像组合为轮廓。 该算子为高斯函数的一阶导数,经过平滑后实现“非极大值抑制”,通过细化梯度幅值矩阵,可以找出像素中所有可能边界点;最后实现双阈值检测,检测方法如下:
1) 如果当前边界图像的强梯度值大于或等于最高阈值,可将当前边界像素标识为强边界。
2) 如果当前边界像素的梯度值处在2 个阈值之间,可将当前边界图像记录为虚边界。 只有当虚边界和强边界连接时才能保留。
3) 如果当前边界像素的梯度值低于或等于最低阈值,将抑制当前的边界像素。
边缘检测虽然能检测出边缘,但有可能边缘是不连续的,或者检测到的边缘不是一个整体[11]。 所以在Canny 边缘检测基础上利用find Contours 函数进一步提取标志物轮廓信息并通过min Enclosing Circle 函数标定最小包围圆,如图7 所示。

图7 最小包围圆标定
2.4 提取目标特征参数
选取所有标志物轮廓的最小包围圆的圆心作为参考点,记录所有圆的圆心,统计各圆心之间距离以及圆心连线的斜率判断当前挂钩是否脱落。 重复以上各步骤,即完成了对运动挂钩的检测与脱钩现象的判定。
3 实验结果与分析
采用海康威视摄像头在矿区采集分辨率为3840×2160 的视频图像,帧率为25 f/s,选取的标志物内圈为蓝色,外圈为红色,是直径8 cm 的圆形图案。 基于生产现场实时的需求,分别选取了上午8 点和夜间凌晨3 点的图像进行实验。 受生产环境影响,摄像头会不断抖动,每一帧画面都会产生细微变化,对标志物的提取有一定难度,不同图像帧之间的差别也较大,经过实验对比,将蓝色分量的HSV 阈值范围设为H(110,130)、S(70,255)、V(110,255)。 实验平台为Intel(R) Core(TM) i5-7300HQ CPU@2.50GHz,16GB RAM,使用了python 语言和OpenCV3。
3.1 良好光照条件下实验
图8 为良好光照条件下的原始图像经本文算法对蓝色标志物进行运动检测的结果。

图8 良好光照条件下标志物检测结果
表2 为良好光照条件下的原始图像提取到的标志物特征参数。 仅当检测出全部6 个标志物时才会进行标志物的特征参数提取。 本文算法选取了2 个最大的标志物作为锚节点,距离值是指其余标志物基于第2个锚点的距离,角度值是指2 个锚节点与任意1 个其他标志物所成角度。 参考值是指挂钩停止状态下摄像机垂直对准标志物时提取到的标志物特征参数。

表2 第22 帧特征参数
由表2 可以看出,在良好光照条件下,本文算法可以清晰检测出标志物,提取图像轮廓,标定最小包围圆。 提取的特征参数在距离值上误差小于3 像素值,角度值上误差小于2°。 可根据此特征参数判断挂钩是否脱落。
3.2 恶劣光照条件下实验
为证明本文算法对光照影响的鲁棒性,同时检测对低照度图像的恢复,在对象、场景、运行轨道相同前提下,以恶劣光照条件下的一段视频作为原始图像,进行对比试验,结果见图9。 表3 为第10 帧提取的标志物特征参数。
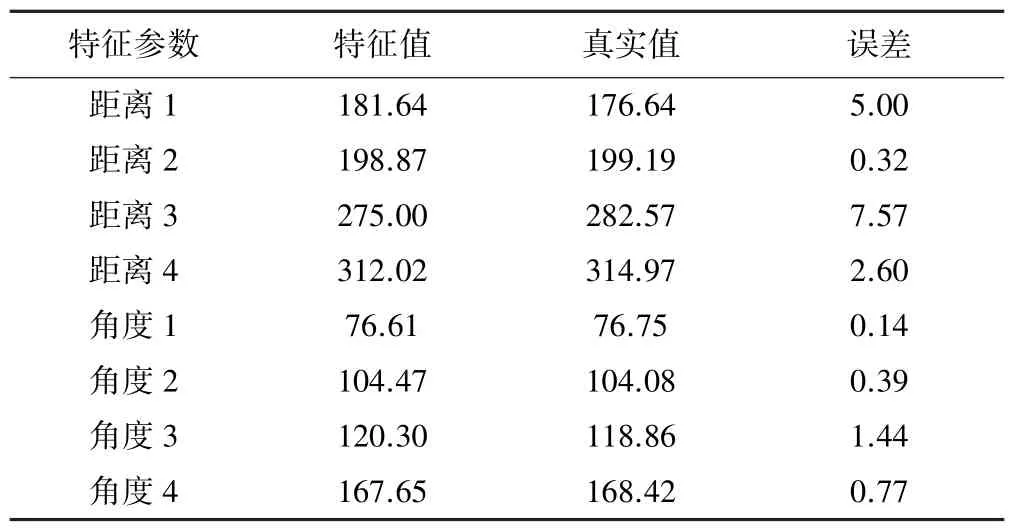
表3 第10 帧特征参数
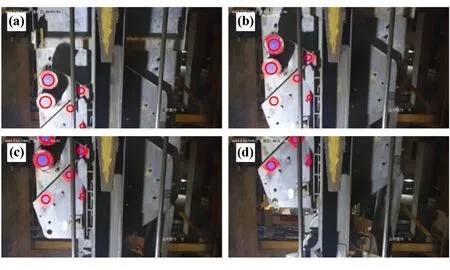
图9 恶劣光照条件下标志物检测
可以看出,在恶劣光照条件下,通过本文提出的低照度图像恢复算法可以清晰地检测出标志物。 提取的特征参数在距离值上误差小于8 像素值,角度值上误差小于2°。 虽然恶劣光照条件下误差较良好光照时偏大,但脱钩状态与未脱钩状态特征值有显著差距,在恶劣光照条件下也可根据此特征参数判断挂钩是否脱落。 验证了本文算法对光照条件的鲁棒性。
4 结论
1) 提出了一种基于HSV 空间融合Retinex 算法的全天候运动目标检测算法,用该算法对运动物体进行检测,实现了对目标物体实时、有效、准确地追踪。本算法对标志物检测以及提取特定标志物有着良好的效果。
2) 本文提出的非接触式图像检测方法可以有效检测挂钩脱落情况,有利于矿区安全生产,且算法易于实现、时效性强、环境适应能力强,有着良好的鲁棒性和准确度,具有一定参考价值。
猜你喜欢
中国机械工程(2022年8期)2022-05-09 12:32:02
中国特种设备安全(2021年5期)2021-11-06 05:09:00
装备制造技术(2021年4期)2021-08-05 07:39:54
中国机械工程(2021年8期)2021-05-07 05:49:10
光源与照明(2019年4期)2019-05-20 09:18:24
音乐教育与创作(2019年8期)2019-05-16 04:06:34
电子测试(2018年9期)2018-06-26 06:45:40
制造技术与机床(2017年11期)2017-12-18 06:46:39
电测与仪表(2015年7期)2015-04-09 11:40:04
河南科技(2014年4期)2014-02-27 14:06:59
