
公路覆水服役环境下弯坡路段车辆停车视距研究
2023-11-13 06:55刘德敬田毕江李维东高银钧
武汉理工大学学报(交通科学与工程版) 2023年5期
刘德敬 田毕江 李维东 高银钧 岳 松
(云南南景高速公路有限公司1) 普洱 676299) (云南省交通规划设计研究院有限公司2) 昆明 650200) (云南省数字交通重点实验室3) 昆明 650200) (同济大学交通运输工程学院4) 上海 201804)
0 引 言
我国公路广泛分布于多降雨地区,很多公路由于各种原因存在一定的排水问题,覆水弯坡路面车辆紧急制动容易滑移失稳,存在较大安全隐患.目前国内外对公路停车视距计算已有相关标准和研究,文献[1]中停车视距由两部分构成:驾驶员在反应时间内车辆的行驶距离和车辆制动至停止所行驶的距离.文献[2]对运行速度协调性及视距评价采用V85.文献[3]中基于驾驶者反应时间和车辆平均减速度计算停车视距,驾驶者反应时间取2.5 s,并给出了车辆平均减速度,车辆平均减速度取值3.4 m/s2.中、美规范中均给出了不同设计速度公路的车辆停车视距建议值,但未考虑曲线路段车辆离心力对于制动性能的影响.
陈东升[3]对中、美、法三国规范有关停车视距的规定进行对比分析研究.王聪[4]通过行驶速度建议值修正停车视距计算公式,对比计算横净距和公路既有横净距,研究了公路视距加宽值.倪佳玮等[5]结合项目采用法国规范中平面视距的计算方法计算典型段落的停车视距,并与法国规范的要求值进行对比研究.王永平等[6]通过对停车视距机理及视距横净距与曲线半径关系的分析,深入阐述高速公路停车视距问题并提出一些针对性的措施.万鑫梅等[7]基于停车视距指标,通过对团雾天气中不同能见度下的安全车距进行预警.
综上所述,目前国内外对公路停车视距计算相关标准和研究多考虑直线路段驾驶员视认反应过程及车辆制动性能,以及道路曲线路段视距横净距与曲线半径的关系,未考虑从车辆通过曲线路段的受力角度对车辆制动性能的影响[8-9].文中研究融合公路路线参数、路面附着系数以及水膜厚度检测数据,考虑一定安全系数,提出覆水弯坡路段路面行驶车辆行驶制动距离模型,结合驾驶员的视认反应时间等因素,得到覆水弯坡路段路面行驶车辆停车视距,为降雨天气下各级公路的车辆停车视距计算及跟车距离预警提供参考.
1 车辆制动滑移条件分析
相比于直线路段,车辆在弯坡路段行驶时,不仅需考虑道路纵坡坡度和道路超高值,还需要考虑车辆转向曲率半径及路面附着系数[10].在弯道路段,车辆的离心力使车辆有向弯道外侧滑移的趋势,尤其对于降雨环境下的低附着系数路面,车辆在弯道高速行驶并制动时极易出现侧滑.车辆在弯坡路段的受力情况见图1,在路面的平衡运动方程式见式(1).

图1 弯坡路段汽车受力情况
(1)
式中:f为车辆所受摩擦力,kN;Fx为车辆所受摩擦力沿道路纵向x的分力;Fy为车辆所受摩擦力沿道路横向y的分力.
车辆在道路弯坡路段沿路面的受力见式(2)~(3),路面摩擦系数见式(4),最大附着系数见式(5).
(2)
Fx=mgsinicosα±max
(3)
μ=-4.73lgh+45.15
(4)
(5)
式中:m为车辆质量,kg;V为车辆沿道路纵向行驶时的质心速度,km/h;g为地区重力加速度,9.8 m/s2;R为道路平面曲率半径,m;i为路面纵坡坡度,rad;α为路面横坡坡度或超高值,rad;μ为路面摩擦系数;fmax为道路路面可给车辆提供的最大摩擦力,kN;h为道路路面水膜厚度,mm.
2 基于公路线形参数车辆最大制动减速度
道路覆水路面附着系数较低时高速行驶的车辆紧急制动容易发生侧滑,现以降雨环境下车辆制动场景为例,研究高速行车条件下车辆允许的最大制动减速度及最小制动距离[11-12].
由式(1)~式(5)可知:在其他参数确定时,可求得道路为车辆提供最大路面附着系数fmax时,车辆最大制动减速度a与路面水膜厚度h关系函数.路面水膜厚度h与降雨强度、道路线形及排水设计等有关,通过水膜厚度检测器可对道路水膜厚度进行检测.以纵坡2%的圆曲线路段为例,对于公路路线设计规范中设计速度100 km/h的公路,当超高值θ=4%时,R最小可取500 m,因此令R=500,600,700,800 m,假设小客车质量1 550 kg,可求解下坡行驶的车辆最大制动减速度a见图2.
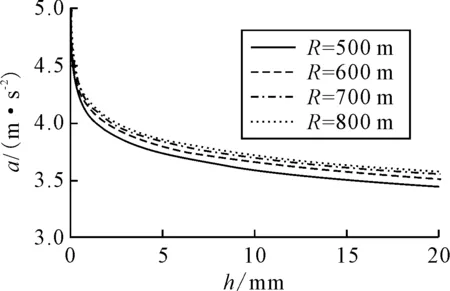
图2 最大制动减速度曲线
由图2可知:其他条件相同时,圆曲线半径越小,车辆所能采用的制动减速度越小,且随着圆曲线半径降低,制动减速度降低的幅度增大;随着路表水膜厚度增大,制动减速度值逐渐减速降低,且越来越趋于线性.
3 覆水弯坡道路车辆停车视距研究
高速公路、一级公路的视距应采用停车视距,每条车道的停车视距不应小于表1中的规定值.

表1 高速公路、一级公路停车视距
停车视距S为
S=S1+S2+S3
(6)
(7)
(8)
S3∈[5,10]
(9)
式中:S1为驾驶员在反应时间内行驶的距离,m;S2为驾驶员开始制动到刹车停止所行驶的距离,m;S3为制动停止时与前车保持的安全距离,m;K为制动系数,可取1.2~1.4.


图3 车辆制动距离模型计算值
(10)
(11)
由图3可知:车辆制动距离随道路水膜厚度增大而增大,增幅逐步降低,随着道路半径增大,车辆制动距离逐渐减小.
4 覆水弯坡道路车辆制动距离模型


表2 试验车辆参数设置

图4 本文车辆制动距离模型计算值与规范值及仿真试验值对比
由图4可知:
1) 模型计算车辆制动距离随道路半径增大而减小,规范公式没有考虑圆曲线路段车辆的离心力,对于不同圆曲线半径,其计算结果均与直线路段相同.
2) 仿真试验车辆制动距离也随道路半径增大而减小,与模型计算结果具有相同的趋势;相比模型未考虑安全系数K时L值,仿真试验车辆制动距离增大了0.093~0.112倍,接近车辆ABS滑移率,即在不考虑滑移率的情况下,本文车辆制动距离模型值与仿真试验结果接近,而安全系数K取1.2,富裕值为0.2,大于车辆ABS最大滑移率0.15,存在一定富裕,从而验证了本文弯坡覆水路面车辆制动距离计算模型的可靠性.
3) 随着圆曲线半径增大,模型计算结果与规范公式计算结果相差越小,随着水膜厚度增大,本文试验结果与公式计算结果相差越大;在道路半径较小时,规范公式计算结果较仿真试验结果相差较大,在道路半径较大时,规范公式计算结果较仿真试验结果相差较小.

图5 车辆制动距离与道路半径及路面水膜厚度的关系
10-5R2-0.091 27h2-3.789 8×10-4Rh,
(R2=0.986)
(12)
式中:R为道路半径,m;h为路面水膜厚度,mm.
该案例(道路纵坡2%,超高4%,车辆以速度100 km/h速度下坡行驶),车辆制动距离随道路半径增大而降低,随路面水膜厚度增大而增大,与上文分析结果一致.因此,对于该道路路段,可以避免复杂多元方程求解过程,依据式(12)对车辆制动距离进行预测.
对于降雨天气下道路覆水服役的情况,车辆通过弯道路段时具有较高的侧滑风险,因此跟车距离可采用停车视距.因此可依据式(12)对车辆跟车距离进行预警.
对于布设有道路路面水膜厚度检测器及车路通讯装置的侧滑危险路段,可将直线、缓和曲线及圆曲线路段路面水膜厚度数据经由交通信息管理平台传输至车辆,由车载电脑根据自车信息计算最大制动减速度及制动距离,进而计算出停车视距,最后通过视觉或触感方式对驾驶员进行跟车预警.

表3 弯坡覆水路面驾驶员跟车距离预警等级示例
(13)
由表3可知:当η≤1时为预警最高等级,车辆跟车距离小于停车视距,不满足规范要求;当η>1.2时驾驶员跟车距离富裕20%,可不对驾驶员跟车距离进行预警,η值可根据路段线形及周边环境情况进行设置.
5 结 论
1) 针对公路覆水弯坡路面车辆紧急制动容易滑移失稳而目前停车视距计算未充分考虑曲线线形的问题,融合公路路线参数、路面附着系数,水膜厚度检测数据,提出覆水弯坡路段路面行驶车辆行驶制动距离模型.
2) 在考虑一定安全系数的前提下,覆水弯坡路段路面行驶车辆行驶制动距离模型可结合驾驶员的视认反应时间等因素,得到公路覆水弯坡路段路面行驶车辆停车视距.
3) 提出公路覆水弯坡路段驾驶员跟车距离预警模型,并给出预警等级划分示例,可为驾驶员跟车行驶进行预警.
4) 研究可用于降雨天气下各级公路的车辆停车视距计算,辅助多降雨地区的公路线形设计,也可为跟车距离预警提供参考.后续会考虑车辆轮胎纹理与路面的附着能力展开研究.
猜你喜欢
工会博览(2022年5期)2022-06-30
少儿科技(2022年4期)2022-04-14
中国交通信息化(2021年2期)2021-07-22
中国计算机报(2020年9期)2020-03-25
建材发展导向(2019年11期)2019-08-24
北京航空航天大学学报(2017年7期)2017-11-24
汽车与安全(2017年9期)2017-09-29
居业(2017年5期)2017-07-24
北京航空航天大学学报(2017年12期)2017-04-23
