含对数项的分数阶T混沌系统滑模同步的3个控制方案
2023-11-07 09:57毛北行王东晓
中南民族大学学报(自然科学版) 2023年6期
毛北行,王东晓
(郑州航空工业管理学院 数学学院,郑州 450046)
20世纪60年代,美国著名气象学家洛伦兹提出了第一个混沌系统模型[1],即Lorenz 混沌系统,经过半个世纪的努力探索,学者们对混沌系统的特点和规律有了更清晰的认识,混沌系统的特性逐渐被发现,随后新的、经典混沌模型被相继提出[2-5],并得出了更多有用结果[6-10],例如:Chen 系统、Liu系统,T系统Qi 系和分数阶混沌系统.2004 年TIGAN 提出T 混沌系统[11].王震等对其基本动力学分析与电路实现、同宿轨道、周期轨道的计算做了研究[12-13].雷腾飞对含有指数项T混沌系统、四维T混沌系统、复T混沌系统做了系统研究[14].随着研究的不断深入,李彪等提出一种新的含有绝对值项的混沌系统,雷腾飞以T混沌系统为研究对象,结合过渡临界T 混沌系统模型,提出了一类含有绝对值项的T混沌系统[15],运用Matlab 仿真对系统的相图、分岔图、分岔空间等特性进行了分析.但与其他分数阶滑模同步的成果相比,分数阶T系统的成果较少,对于含有半导体器件的电路来说,研究带有对数项的T系统是非常有必要的.本文对含对数项的分数阶T混沌系统,给出了T混沌系统吸引子相图,在分数阶微积分的基础上,得到分数阶T 混沌系统取得滑模同步的3个控制方案.
1 系统描述
定义1[16]Caputo分数阶导
以下考虑分数阶含对数项T混沌系统
选取系统参数a=2,b=1,c=9,q=0.942,吸引子图如图1.

图1 系统(1)的相图Fig.1 The phase diagram of system(1)
设计(1)为主系统,从系统如下:
引理1[16-17]若x(t)为连续可微的函数,则有
引理2[18-19]设,若存在常数k>0,使得DtqV(t) ≤-ky12(t),则y12(t) ≤2V(0)Eq,1(-2ktq)且
2 主要结果
假设1|e3|≪|z|<M,且z>0.
定理1设计滑模面s(t)=Dtqe1+ae1,控制量
期中η>0,则系统(1)与(2)滑模同步.
证明滑模面上有s(t)=0 ⇒Dtqe1=-ae1,⇒e1→ 0 ⇒Dtqe1→0.
根据(3)式的第1 个方程得到Dtqe1=a(e2-e1)⇒e2→0,下证e3→0.
引导定语从句的词有关系代词that,which,who(宾格whom,所有格whose)和关系副词where,when,why。关系代词和关系副词放在先行词和定语从句之间,起联系作用,同时又做定语从句的一个成分。
由(3)式的第3 个方程可得:x1y1-xy=x1e2-ye1.
因系统轨迹有界可知x1,y有界,故e1,e2→0时,x1y1-xy=x1e2-ye1→0,可得:
从而由引理2 不难得到s(t)→0,因此系统(1)与(2)滑模同步.
定理2设计滑模面s(t)=e2+e1,控制量
其中常数η>0,则系统(1)与(2)滑模同步.
证明滑模面上有s(t)=0 ⇒e2=-e1,根据(3)式的第1个方程可得:
从而由引理2 不难得到s(t)→0,因此系统(1)与(2)滑模同步.
定理3设计滑模面s(t)=e2,控制量
其中常数η>0,则系统(1)与(2)滑模同步.
证明滑模面上有s(t)=0 ⇒e2→0,根据(3)式的第1个方程有Dtqe1=-ae1
⇒e1→0,同理可证e3→0,过程同定理1,略.
从而由引理2 容易得到s(t)→0,因此系统(1)与(2)滑模同步.
3 数值仿真
选取系统参数a=2,b=1,c=9,q=0.942,定理1~定理3中的误差见图2~图4.
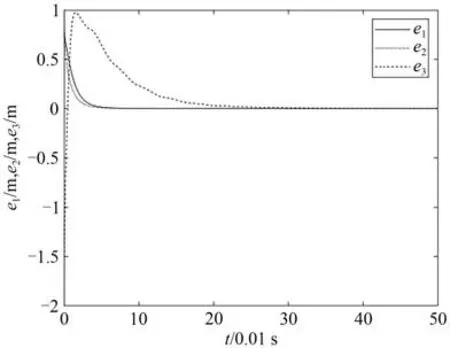
图2 定理1的误差Fig.2 Errors in theorem 1
定理1~定理3 分别构造滑模面s(t)=Dtqe1+ae1,s(t)=e1+e2,s(t)=e2.设计控制量分别为:
取定初始值 (x(0),y(0),z(0))=(2,2,5),(x1(0),y1(0),z1(0))=(3,3,3),η=1.
由图可知,初始时误差相差较大,在时间的变化下系统误差最终趋于坐标原点,表明误差趋近于0,定理1、定理2 取得同步所需时间比定理3 长,定理1、定理2 取得同步的时间没有太明显的差别,但是定理1 比定理2 的控制器要复杂,所以需要消耗较大的能量,而定理2则控制代价小容易实现,且定理1中误差振幅较定理2大,因而定理1的抖振现象可能较为明显,另外从图2、图3、图4 可看出,3 个定理的控制效果越来越优良.
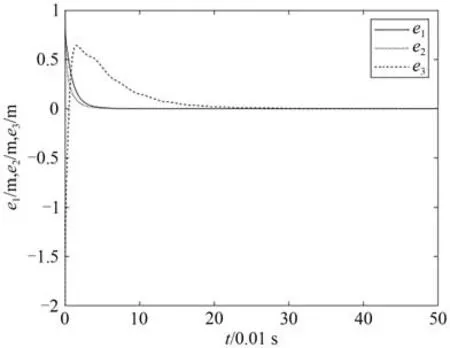
图3 定理2的误差Fig.3 Errors in theorem 2

图4 定理3的误差Fig.4 Errors in theorem 3
4 结语
根据滑动模态控制理论和分数阶微积分的相关理论,本文研究了含对数项的分数阶T 混沌系统滑模同步的3 个控制方案.利用分数阶稳定性理论给出了详细的证明过程,并对所得结果进行了验证.以上研究为该类混沌系统的同步控制提供了一些新思路.
猜你喜欢
阅读(快乐英语中年级)(2023年6期)2023-05-24
三门峡职业技术学院学报(2021年4期)2021-04-19
新世纪智能(英语备考)(2019年12期)2020-01-13
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
初中生学习·高(2016年8期)2016-05-14
高中生学习·高三版(2014年3期)2014-04-29
华东理工大学学报(自然科学版)(2014年6期)2014-02-27