一种适用于校园疫情管理的智能运输系统研究
2023-11-02 08:59吕艾容郭嘉明王宇鹏苏俊宁
车辆与动力技术 2023年3期
吕艾容, 董 校, 闫 英, 郭嘉明, 王宇鹏, 苏俊宁
(大连理工大学,大连 116024)
新冠疫情爆发后,快递业需求急速上升.2021年,我国快递业务量破千亿大关,量值达1 083亿件,同比增长29.9%.如图1所示,2016年至2021年,我国快递业务量持续保持着较高且稳定的增长态势[1].

图1 2016-2021年我国快递业务量及增长率[1]
数据来源:国家邮政管理局
在大学生疫情封校期间,网购增加的同时也带来了快递传播病毒的风险.尽管调研数据显示近42.8%的高校仍采用人工收发快件方式,近三成的高校采用不正确的快递消杀方式[2],但这无法避免快递点的病毒传播风险[3].在疫情常态化管理下,部分高校引入菜鸟、京东等快递公司推出的校园智能无人派送小车[4],以实现无接触配送[5].然而,这种方式仍然缺少快递有效消杀环节,存在潜在的病毒传播隐患.同时,现有小车存在效率低、单次运送量有限等问题,无法满足封校情况下学生收发快递的实际需求.因此,新型校园智能物流系统的研发迫在眉睫,需要完善的疫情快递管理制度和风险较小的无接触配送方式来解决问题.
随着疫情背景下快递收发量的骤增,高校师生对物流系统的使用需求量大,同时操作应当简单.骤增的快递收发量也带来了防不胜防的病毒传播风险,因此系统的消杀功能必须科学化、可视化和易管理.此外,高校复杂多变的道路地形也增加了物流系统必须具备高适应力和耐受力的条件.因此,在设计物流系统时,需要考虑系统的定位.针对高校师生的需求,物流系统必须易于使用且操作简单.对于病毒传播风险,系统必须具备科学化、可视化和易管理的消杀功能.同时,针对高校复杂多变的道路地形,系统必须具有高适应力和耐受力,以保证其稳定性和可靠性.综上所述,物流系统的设计定位应该是满足高校师生需求、具备科学化消杀功能和具有高适应力和耐受力.
本文介绍了一种解决高校封校期间快递传播病毒风险的校园智能物流系统.该系统采用了AVG小车技术结合消杀模块创新性设计,实现了快递运输和有效消杀同步的功能,从而降低了无接触配送病毒传播风险.同时,该系统采用用户友好型高底盘自适应车体结构设计,可以完美应对高校地形复杂多变问题.为了提高系统的使用普及性,该系统采用了微信小程序用户交互形式和遥控手柄控制方式,并利用5G网络优势降低了系统使用难度.
该系统采用智能消杀运输小车,帮助解决快递定向运输和消杀等问题.它将集中处理的快递再次细分,形成更小的集散中心,使得运输网络深入到校园的各个角落,提高了快递运输的效率.通过这种方式,该系统极大地改善了校园封闭管理下学生收取快递的体验.综上所述,校园智能物流系统的开发解决了高校封校期间快递传播病毒风险的问题,提高了物流效率,改善了学生收取快递的体验.
1 系统总体设计
本文设计的校园智能物流系统是由三个部分构成的:自适应车体结构、AVG小车系统和用户端微信小程序.其中,AVG小车系统包括电机驱动模块、遥控手柄、通信模块和超声波模块,能够实现小车的行进、消杀、通信和避障等功能.整体框架图如图2所示.电机驱动模块分为两部分,一部分是基于LV8731和PS2遥控手柄构建的车体运动模块,另一部分是基于L298N的车体消杀模块.主控芯片采用STM32单片机,并通过MC907与华为云平台通信以接收和反馈用户端操作.用户可以使用PS2遥控手柄控制小车前进、后退、左转、右转,并在行进过程中使用步进电机对小车进行消杀和通风.此外,小车还配备超声波模块,可以自动避开障碍物.上述产品信息来自产品手册[11].

图2 智能消杀快递小车的整体设计框图

图3 小车外观示意图
2 车体结构设计
为应对高校内部多变复杂的道路地形,本文设计的小车外型采用近似长方体的结构,内部结构如图4所示,底部采用较高的底盘,能够适应各种崎岖地形以及减速带等路面障碍,同时使用具有充分抓地能力的车轮,防止车辆在爬坡时出现停滞、倒退等现象.为方便用户取物,车门采用侧边向上抬起的方式,符合人们取物的习惯.此外,在车顶部还增设了超声波模块,用于感知距离,防止事故的发生.

图4 小车内部结构示意图
综合以上设计特点,本文的校园智能物流系统能够有效应对高校复杂多变的道路地形,并具备自适应车体结构、AVG小车系统和用户端微信小程序三个部分构成.通过小车运用的消杀、遥控、通信和避障等功能,能够实现快递运输与有效消杀同步,降低无接触配送病毒传播风险,提高系统使用普及性,极大改善了校园封闭管理下学生收取快递的体验.
3 系统硬件设计
3.1 主控制板
Keil uVision是一款专业的嵌入式开发环境软件,可用于多种微控制器的开发.它支持多种编程语言,如C、C++和汇编语言,并提供了丰富的库函数和调试工具,可大大简化嵌入式开发的流程.在使用Keil uVision进行开发时,可以通过图形界面对程序进行编写、调试和烧录,提高了开发效率.同时,Keil uVision还提供了丰富的在线文档和教程,帮助开发者更快地掌握开发技巧(如图5).

图5 利用ARM仿真器对STM32单片机进行程序烧录
3.2 车体运动模块
步进电机是一种能够在没有反馈控制下实现准确位置控制的电机.它将电流以脉冲信号的形式进行控制,每次接收到一个脉冲信号就会转动一个固定的角度,因此可以非常准确地控制其旋转角度和速度.LV8731是一种针对步进电机的驱动芯片,它可以提供高达1/32微步的分辨率,具有过流、过热保护功能,还可以通过SPI接口进行配置和监测.PWM即脉宽调制(Pulse Width Modulation),是一种通过调节脉冲信号的占空比来控制电机速度的技术.在小车的程序中,通过改变PWM的占空比来改变电机驱动的电压和电流,从而控制电机的转速和扭矩.具体地,占空比越大,输出的平均电压就越高,电机转速也就越快.PS2手柄[6]是一种常见的游戏手柄,具有丰富的按键和摇杆控制功能.小车的单片机控制系统可以通过连接PS2手柄信号接收器来接收PS2手柄发送的无线信号,从而实现对小车的操控.通常情况下,每个按键和摇杆的状态都会被编码成一个特定的数字信号,发送到控制系统中进行处理.遥控手柄示意图如图6所示

图6 PS2按钮和操作杆
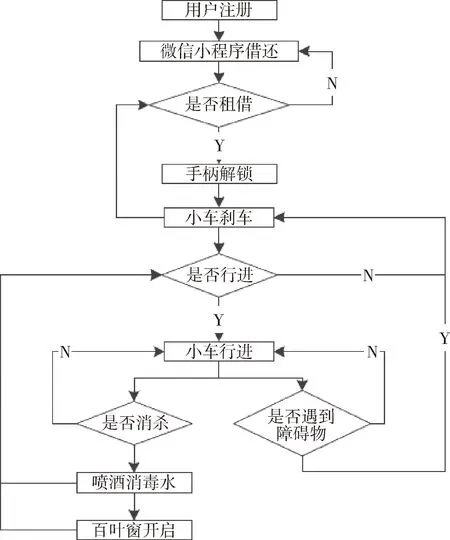
图7 功能示意图
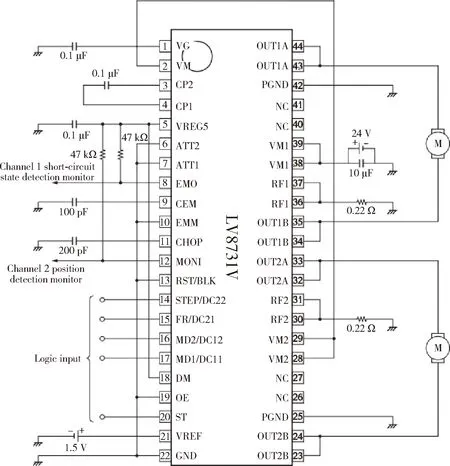
图8 电机驱动模块LV8731原理图[11]
3.3 车体消杀模块
3.3 消杀模块
根据“3R原则”,小车的消杀模块采用了长期使用的设计,以减少对环境的不良影响.为了实现高效的消杀功能,小车内部配备了多种元器件,包括水泵、小风扇、百叶窗和舵机.通过这些元器件与单片机控制系统的配合,实现了消杀和风干功能.消毒水种类选择了安全高效的75%乙醇溶液[7],存放在水泵中.通过微信小程序,用户可以实时监控消毒水的含量等信息,并通过手柄控制小车在行进中对快递进行喷洒消杀.消杀完成后,百叶窗自动打开,利用小风扇进行通风干燥,方便用户拿取快递.这样的设计不仅有效保证了消杀的质量和效率,也符合环保理念和可持续发展原则.
小车内部采用L298 N模块与STM32系单片机连接,控制直流电机小风扇与无刷直流电机水泵,舵机直接由STM32系单片机控制.驱动芯片可同时控制两个直流减速电机做不同动作,在6V到46V的电压范围内,提供2安培的电流,并且具有过热自断和反馈检测功能.L298 N对电机进行直接控制[8],通过主控芯片的I/O输入对其控制电平进行设定,为电机进行正转反转驱动,操作简单、稳定性好,可以满足直流电机的大电流驱动条件.
L298 N模块的电源直接由11.1V的外接电源供电,它通过接收STM32单片机上信号口PA1PA4的信号来控制小风扇和水泵的运行.具体地说,L298 N模块的IN1IN4端口从STM32单片机上的信号口PA1~PA4接收信号,并通过OUT1、OUT2和OUT3、OUT4端口输出相关的信号,从而控制小风扇和水泵的启停.通过改变两个电机对应端口的I/O状态,可以实现对小风扇和水泵的控制.
MG996R舵机[11]是一种高扭矩、高精度的舵机,可用于精确的位置控制.它通常由PWM信号控制,通过改变PWM信号的占空比来控制舵机的角度.PWM信号的频率一般为50 Hz,脉宽的范围通常在500 us到2 500 us之间.舵机的转动角度与脉宽的大小成线性关系,即脉宽为500 us时,舵机的角度为0度,脉宽为2 500 us时,舵机的角度为180度.因此,通过调整PWM信号的占空比,可以精确地控制舵机的转动角度.在这个设计中,MG996R舵机与经由STM32单片机的电源直接供电,通过信号口与STM32单片机上的端口PA6连接,调节输出PWM信号的占空比来控制舵机的转动角度,实现消毒模块中百叶窗的开闭控制.
3.4 通信模块
小车采用窄带物联网NB-IOT与华为云平台进行连接.数据经由华为云平台转入微信小程序,实现通信功能.在华为云平台上,真实设备被添加和绑定.用户可通过微信小程序经华为云平台向模块发送AT命令控制小车的借用与归还功能.这样实现了小车与手机端的通信.
在用户使用过程中,小车可监测行进状态、车内消毒水含量等信息,并将监测信息通过MC907通信模块上传至华为云平台进行记录和储存.这些数据可随时随地从微信小程序端反馈给用户和相关管理人员,实现全方位的监测和管理功能.
3.5 超声波模块
智能小车的快递检测系统具有重要的功能,主要由车内的超声波传感器和单片机控制系统组成.当用户放入快递时,超声波模块HC-SR04[11]将检测到快递与传感器之间的距离,并将距离信息传递给单片机控制系统进行处理.单片机控制系统根据预设的距离阈值来判断是否有快递被放入,如果有,则允许小车进行下一步的消杀功能操作;如果没有,则不执行消杀功能,等待用户放入快递后再次检测.这个快递检测系统利用了超声波的物理原理,通过发送和接收超声波信号来测量快递与传感器之间的距离.单片机控制系统对传感器返回的距离数据进行处理,并根据设定的距离阈值来判断是否有快递被放入.该系统的实现可以有效地避免小车在没有快递的情况下浪费资源和时间,提高了小车的使用效率和经济性.
超声波测距采用渡越时间法[9].这种方法的原理是,通过向超声波传感器发送一个10us的触发信号,测距模块将会发出一个周期性电平.当超声波遇到障碍物时,会反射回来.接收器接收到反射回来的超声波信号后,谐振片将会产生谐振效应,并将其转化为一个脉冲信号.这个信号经过放大后,会经过计算与安全距离进行比较.这样,就可以得到被测距离,并判断是否有障碍物.
智能消杀快递小车配备了自动避障系统,该系统由车外的超声波模块和单片机控制系统组成.当小车行进时,超声波模块不断采集道路实况数据,以实现自动避障系统的工作范围的调节.当超声波模块检测到前方有障碍物时,它会将小车与障碍物之间的距离信息反馈给单片机控制系统.单片机控制系统会根据该信息做出判断,从而控制小车停止或避开障碍物,以确保小车行进的安全性.
4 系统软件设计
4.1 “快递E行共享平台”用户端微信小程序
为了创建校园物流系统,采取线上线下相结合的方式,开发了一款微信小程序供用户使用.该小程序使用WXML、WXSS和JavaScript语言进行开发,同时利用一系列插件和微信独有的API接口等技术.通过将微信小程序与华为云平台连接,实现了数据的转发和处理,从而实现了对小车借用与归还的控制.在微信小程序用户界面上,用户可以方便地使用该物流系统,如图10所示.通过这种方式,可以提高物流运输效率,方便了校园内的快递、外卖等物流服务.

图10 微信小程序用户界面
4.2 云应用
为了实现智能消杀快递小车的云应用,我们选取了华为云平台作为数据储存与操作的物联网平台.在华为云平台上,我们建立了相关产品与设备,并从服务、属性等方面定义产品功能,构建数据模型.通过连接激活设备MC907通信模块,利用图形化开发让所需数据与模型建立连接,使小车的单片机控制系统可以经由MC907通信模块联网,实现与华为云平台的通信.华为云平台的使用界面如图11所示.这样的方案可以使智能消杀快递小车的数据得到安全可靠的储存和操作,并且实现数据的远程控制与管理.

图11 华为云平台使用界面
4.3 路径规划算法
本系统采用高校地图导入、建筑物标记与智能运输车借还点坐标录入等方式,为用户提供了基础数据.通过路径规划算法[10]的优化,我们预先建立了最优路线模型,并将其储存于系统中.在用户使用过程中,用户输入所在地与目的地,系统将会根据预先储存的最优路线模型,自动计算并给出最近小车借还点的最优路线,帮助用户快速找到目的地.通过互联网思维的优化路程,为用户提供了高效的行进参考.系统地图与路径规划示意图如图12.
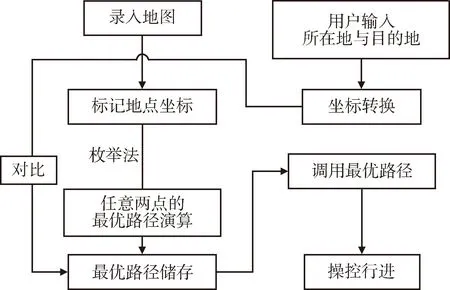
图12 系统地图与路径规划示意图
5 结论
在疫情时代,校园内快递运输面临全新的场景和消杀问题.为适应环境需求的变化,我们整合了市面上小车的相关功能,并设计了校园内无接触配送智能运输系统.这一系统在保证疫情防控安全前提下,有效解决了学生快递收发困难的问题.另一方面,我们还基于物联网思维优化了校园配送的行驶路线,提高了配送系统的运输效率.通过预先导入高校地图、录入建筑物与智能运输车借还地点坐标,以及优化路径规划算法,我们能够为用户提供最优路线,并在用户使用过程中实时更新路程,从而实现了优化路程.这一智能运输系统,不仅在疫情时代下保障了学生的快递配送,同时也提高了校园配送的效率,为校园物流系统的现代化发展提供了支持.
猜你喜欢
现代职业安全(2022年4期)2022-06-10
科教新报(2021年34期)2021-09-30
环球时报(2021-04-22)2021-04-22
快乐语文(2020年36期)2021-01-14
科学大众(2020年17期)2020-10-27
无人机(2020年2期)2020-07-20
自动化学报(2019年6期)2019-07-23
文苑(2018年22期)2018-11-19
电子制作(2018年8期)2018-06-26
电子制作(2018年1期)2018-04-04