特种重型高机动底盘转向系统的设计
2023-11-02 08:59贺龙飞侯永红杨志俊赵海林
车辆与动力技术 2023年3期
贺龙飞, 侯永红, 杨志俊, 赵海林
(北奔重型汽车集团有限公司,包头 014000)
汽车转向系统是用于改变或保持汽车行驶方向的专设机构.它的作用是:使行驶过程能按驾驶员的操纵而实时地改变行驶方向,并且能在受到路面传来的偶然冲击、汽车意外偏离行驶方向时,能与行驶系统配合共同保持汽车稳定性地行驶.
1 转向系统发展简介
作为底盘中独立的分系统——转向系统,在汽车的技术发展中也经历了多次的历史变革.转向技术的发展主要经历了机械转向、液压(气压)动力转向、电子控制液压动力转向和电动转向几个阶段.
最早期的汽车转向机构非常简单,主要由一级齿轮传动机构和转向拉杆等构成,基本功能是将驾驶员的手动旋转操作转变为转向拉杆的左右摆动从而带动车轮转动.随着汽车技术的发展,出现了更为复杂的机械转向机构,如循环球式转向器、涡杆滚轮式转向器、齿轮齿条式转向器.对于机械式转向机构来说提高转向器的传动效率已经成为产品竞争力的重要手段.现在国内外变速比转向器(循环球式或齿轮齿条式)已经进入完全成熟的阶段,传动比基本可达到22.2~26.2,它是解决汽车转向轻便性的经济而有效的措施.
机械式的液压助力转向系统是是最常用的一种助力方式,这种转向助力依靠发动机去驱动,机械液压助力的方向盘和轮胎是用机械部件连接的,所以这种转向助力操控起来会比较精准,而且因为这种转向助力的使用时间比较长,所以可靠度比较高,且成本比较低.
电控液压助力和机械助力一样,唯一不同的是机械助力依靠发动机驱动,电控液压助力依靠电动机驱动,电子液压助力拥有机械液压助力的所有优点,但其维修和保养的成本会更高.
电动助力是直接由电动助力机提供转向动力,省去了液压助力所需要的用于连接的零件,比如转向油泵等.所以电动助力比较省能耗,而且操作起来会比较轻便,除此之外电控助力转向还具有安装方便、效率高、回正性好,所以,现在电控助力作为一种新的转向技术,不断冲击着液压转向系统,但目前在重型高机动运输车还未应用.
应急转向系统,又称双回路动力转向系统、辅助转向系统.该系统是在原液压动力转向系统的基础上添加了新的功能部件,为车辆转向器增加一套备用供油装置.在车辆行驶过程中,一旦发动机停车或主转向油泵出现故障,系统将自动切换到应急供油管路,由应急泵为转向器提供压力油,保证转向系统正常工作,保障驾乘人员和车辆的安全.
军用重型高机动运输车是一种适合行驶在越野路面上的特种车辆,广泛应用于武器系统的发射和运输平台.现代战争中随着局势科学技术的发展,高清晰度卫星侦察技术已能检测地面一平方米内的物体,高空侦察机能快速、纵深地侦察目标,加上精确制导技术的发展等因素使得固定式以及机动性差的武器系统在战前几乎没有生存余地,不能充分发挥其应有的作战效能.这对武器系统的射前及射后生存能力提出了更高的要求,因此也对作为发射和运输平台的特种越野车的性能也提出了更高的要求.武器系统的机动能力在很大程度上取决于作为其发射平台的越野车底盘的机动性.转向系统作为特种车底盘的主要系统之一,其性能好坏将直接影响整车的行驶安全性、操纵性稳定性和越野能力,以适应种使用环境和条件,因此,军用汽车尤其是特种车高机动技术的发展关系到一个国家的国防安全.
2 某双前桥重型高机动底盘转向系统设计
2.1 转向动力系统设计
动力转向部分设计主要包括方向盘、转向传动轴总成、转向油罐、转向泵、应急转向油泵、动力转向器、转向助力油缸及转向管路等.
2.1.1 设计要点
(1)整车转向力、转向扭矩的计算分析、动力系统各零部件参数选择;
(2)转向油泵、应急转向油泵控制流量、排量的计算;
(3)动力转向器输出扭矩、工作压力、垂臂转角、传动比等的选择设计;
(4)转向助力油缸缸径、行程、耐压压力的设计;
(5)转向角传动系统的设计及布置.
2.1.2 转向动力系统设计
(1)根据以上设计要点,确定转向器为循环球式,转向泵为叶片泵,应急泵为柱塞泵,带转向助力缸.
(2)液压管路原理图
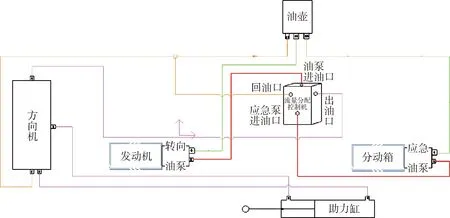
图1 转向液压管路原理图
2.1.3 应急转向系统
工作原理:
系统主要包括:供油模块,动力分配模块,故障告警显示模块,辅助管路等附件.
系统的动力源主要由联接在发动机上的主转向油泵和联接在分动箱或变速箱上的应急泵提供.应急泵的输入扭矩由变速箱提供,这意味着即使发动机停止工作,只要车辆在行走,车轮在转动,应急泵就能正常工作.从而保证车辆转向系统在以下状况中能正常工作:
(1)发动机熄火不能正常运转等故障;
(2)主转向泵失效不能提供所需流量;
(3)怠速转向流量小(此时主泵和辅同时供油)从而解决怠速方向沉重问题.
总之,应急转向系统在发动机和主转向系统出现任何故障时,都能保证行走车辆具备转向能力,最大程度提高车辆的安全性能.应急系统原理图如下:
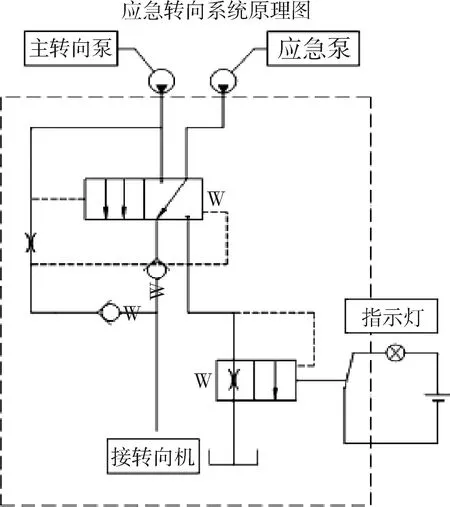
图2 应急转向原理图
2.2 转向梯形机构
转向系统是人、车闭环系统的重要环节,转向梯形机构是这重要环节中影响转向系统的主要因素.8×8高机动底盘转向梯形机构设计,不但要满足汽车对转向系统的基本要求:一是保证汽车在转向过程中、转向轮处于纯滚动或极小滑移状态、从而提高轮胎的使用寿命,二是保证汽车操纵的轻便性和稳定性;而且要满足越野汽车的高机动性能的要求.
2.2.1 8×8重型高机动底盘转向梯形机构设计特点
8×8重型高机动底盘转向梯形机构按结构形式可分为整体式和断开式2种.断开式转向系统又分为:对称杆式、中间臂式、齿轮齿条拉杆式等,多用于独立悬架形式的汽车;整体式转向系统多用于转向轴为整体刚性轴、悬架形式为非独立悬架的汽车.断开式转向系的主要优点是:与转向轮采用独立悬架相配合,能够保证一侧车轮上、下跳动时不会影响另一侧车轮.其缺点是:杆系和球头增多,结构复杂,制造成本高,调整转向轮定位困难.
该文所设计的底盘匹配的是独立悬架,纯属高机动性能的汽车,因此,该车采用断开式转向梯形机构.其设计原则为:
(1)汽车转弯行驶时,全部车轮应绕瞬时转向中心旋转,任何车轮不应有侧滑;
(2)汽车转向行驶后,在驾驶员松开转向盘的条件下,转向轮能自动返回到直线行驶位置,并稳定行驶;
(3)操纵轻便,汽车在任何行驶状态下,转向轮不得产生自振;
(4)悬架导向机构和转向传动机构同时工作时,运动不协调量应最小,也就是要求转向梯形机构断开点的设计;
(5)保证汽车有较高的机动性并有最小的转弯半径.
2.2.2 转向梯形机构各轮阿克曼转角误差分析
阿克曼误差是检验车辆的转向设计的转向角是否与理论转向角相符合.通过建立好的转向系统三维模型骨架,再搭建出运动学模型,将运动学分析得出的参数值运用到仿真的转向系统当中得出仿真的转向角与阿克曼研究得出理论转向角进行对比分析,分析结果见图3.
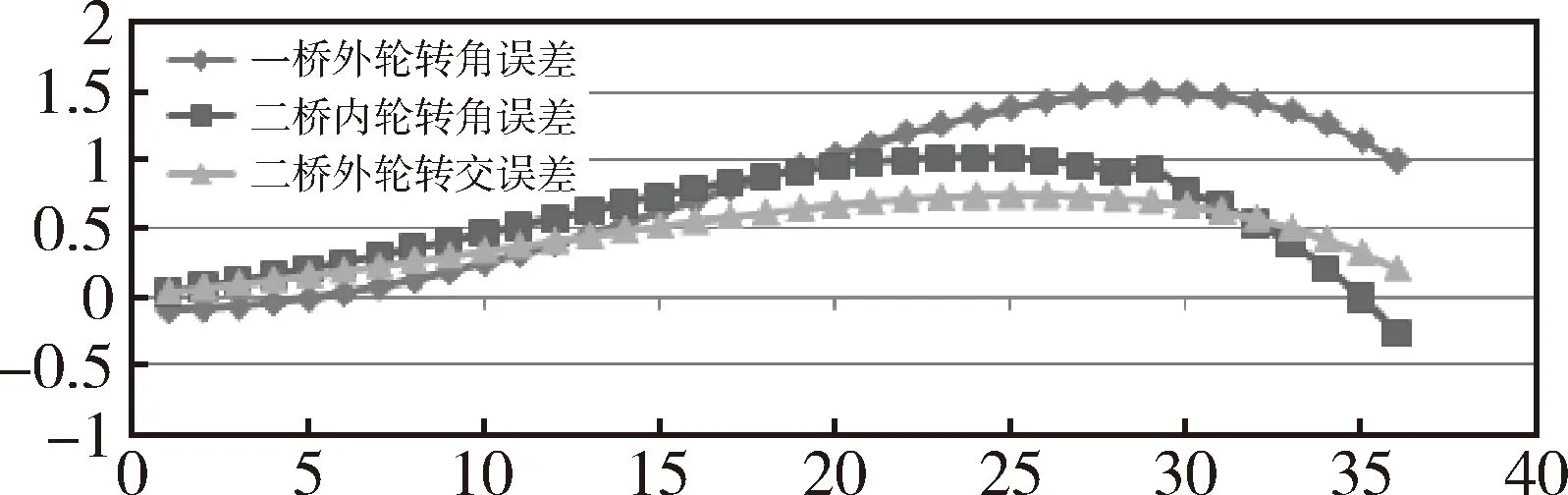
图3 车轮转角误差值
综上所述,转向桥的理论转角与实际转角关系在30°范围内不超过1.5°,可以有效的降低轮胎的磨损.仿真的过程是为了验证设计,在设计中转向拉杆、球头销的位置、角度,转向立柱的定位点都可以通过仿真分析确定出来.
2.2.3 最小转弯半径计算
转向系统由转向动力、转向杆系两部分组成.转向系统的设计是根据独立悬架的结构型式进行设计,转向杆系设计参数输入,见表1.
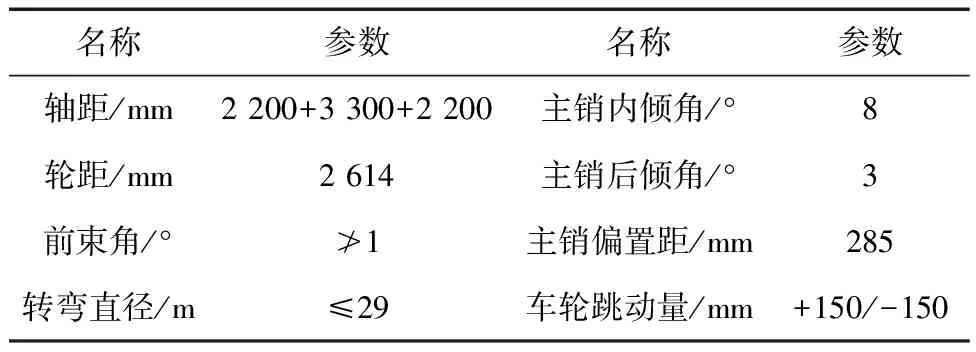
表1 转向系统设计参数输入表
设计合理的转向杆系,按照阿克曼原理使所有转向轮在车辆常用转向范围内尽量绕同一瞬时转向中心作纯滚动,并使在车轮最大内转角情况下,整车最小转弯直径满足设计输入≤29 m的要求.
根据阿克曼原理,一桥内外轮转角关系应满足下列关系式:
(1)
式中:α为一桥内轮转角(°);β为一桥外轮转角(°);L为一桥和二、三桥之间的轴平面交点之距(mm);K为同轴上两主销中心线间的距离(mm).
在计算各轮转角时有两个假设条件:
(1)假设转向瞬心在三、四桥桥中间的延长线上;
(2)各轮胎均为感性即不考虑轮胎侧偏等影响因素.
阿克曼原理草图见图4,可得出见表2的理论转向角.

表2 理论转向角
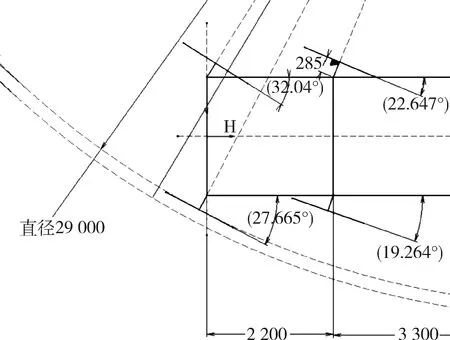
图4 阿克曼原理图
阿克曼草图的原理是将每个轮子在转弯情况下,在车轮中心,画出垂直于车轮表面的延长线,这些延长线与后轮中心的垂直延长线交于一点,这个点就是车轮的瞬时转动中心,根据绘制的草图,计算转弯直径为29 m时对应的一桥内轮的最大转角,计算出内轮最大转角后,再根据式(1)计算外轮转角,最后计算结果如下表2所示:
2.2.4 独立悬架转向梯形断开点计算
分段式横拉杆铰接点的位置对汽车转向系统与悬架系统的运动协调性有重要影响.因为在汽车直线行驶时,当车轮上下跳动时,与转向节臂成一体的梯形臂球销中心和横拉杆一起绕该横拉杆内端铰接点摆动,而该球销中心点同时也随悬架摆臂摆动而摆动,两个运动可能有不同的轨迹.当两摆动轨迹不重合时,将使车轮产生附加转向,这对汽车行驶是不利的.为避免这一点,在转向系统与悬架系统设计时,要优选球销铰接点,即转向梯形断开点的位置,使上述两个运动的轨迹差别最小.
断开式转向梯形的断开点位置确定方法因悬架型式与结构不同而不同,对采用双横摆或麦弗逊式独立悬架时,常用图解法确定其断开点位置.近年由于计算机的普及,逐渐转为采用解析计算的方法来确定断开点位置.针对本车双横臂独立悬架通过对前术检查校核后车轮上、下跳极限位置时对前束变化小于1°,见图5、图6.
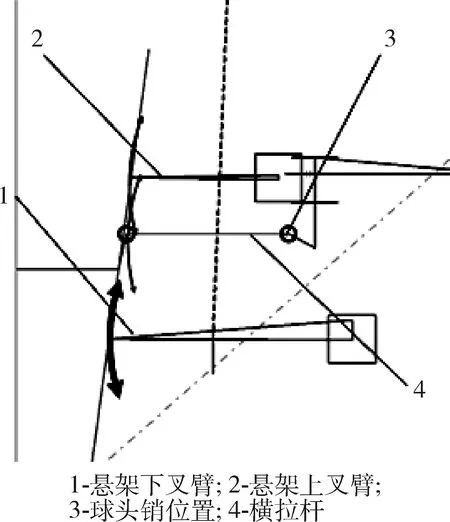
图5 运动曲线
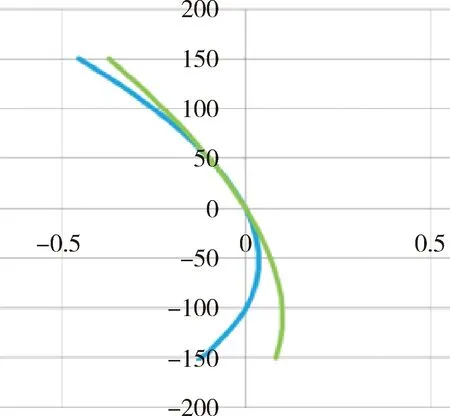
图6 上下跳与前束的曲线
从图中列出的数据可以看出,车轮在±150 mm范围内跳动时,前束变化小于1°,此变化对转向系统的影响很小,故断开点设计满足要求.
2.3 某8×8重型高机动底盘转向系统总布置
通过理论设计计算,对8×8重型高机动底盘转向系统进行建模进行整车上的运动干涉检查,确定后的数模状态见图7.
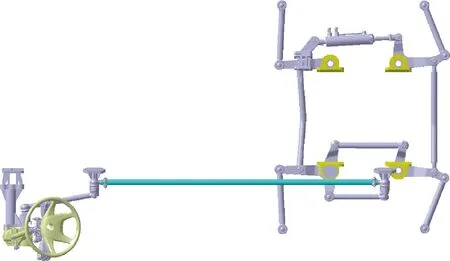
图7 8X8重型高机动底盘独立悬架转向系统建模
3 结 论
本文采用汽车设计的基本理论和方法,以某8×8重型高机动底盘为分析对象,对独立悬架转向系统进行了设计分析.其分析目的是给出一种多轴高机动越野车独立悬架转向系统在工程图纸设计阶段即可准确地预测其独立悬架转向系统设计能否满足高机动性要求的可行性.
猜你喜欢
装备制造技术(2022年7期)2022-10-21
玩具世界(2022年1期)2022-06-05
中学生数理化·七年级数学人教版(2021年9期)2021-11-20
装备制造技术(2020年3期)2020-12-25
当代陕西(2019年12期)2019-07-12
汉语世界(The World of Chinese)(2019年1期)2019-03-18
解放军健康(2017年5期)2017-08-01
知识经济·中国直销(2016年2期)2016-11-07
交通建设与管理(2015年13期)2015-03-20
汽车零部件(2014年5期)2014-11-11