基于多模开关结构的某混合动力民用车辆能量管理策略
2023-11-02 08:59朱晶宇
车辆与动力技术 2023年3期
李 欣, 朱晶宇
(1.中国北方车辆研究所,北京 100072;2.大连理工大学,大连 116024)
由于对动力系统的大规模需求,传统柴油车很难提高燃油经济性.混合动力车辆在城市道路上行驶时可以充分发挥节能优势.引入驱动电机可回收制动能量,另一方面,发动机与电机协同使得发动机可以在高效率区域工作,从而适应城市民用车辆的制动频率和低速行驶工况.在国内,混合动力车辆主要采用P2结构,发动机和永磁同步电机连接在同一轴上,可以相对提高车辆日常运行过程中的可靠性和能量利用率.增加变速箱可以有效换届发动机和电机的坡起压力,并在较大的范围内改变车辆行驶速度和车轮输出扭矩.例如,GM Allison混合动力客车和Hino混合动力轨道客车采用发动机、双电机和多个湿滑槽控制,从而实现多种工作状态和模式切换.与P2结构相比,多模开关可大大改进油耗和优化动力系统工况.
混合动力车辆的控制策略在混合动力车辆的设计过程中起着重要的作用.随着控制器硬件计算能力的进步,许多基于规则、优化和人工智能的能量管理策略被开发和应用于工业上.由于混合系统的复杂性,控制策略的性能取决于参数优化.许多先例讨论过增程器与并行混合系统的优化方法.然而,关于多模开关混合动力系统和传动比优化的例子却很少.本文提出了一种基于神经网络的发动机工作点在线优化控制策略,采用直接搜索算法对齿轮传动比参数和多模切换边界参数进行优化.
1 控制模型设计
1.1 建模设计
本研究以某混动车辆增程器为框架进行研究.将飞轮拆下,并将其与电机连接,以建立一个混合多模态框架结构.多模开关混合动力系统结构如图1所示,包括柴油机、永磁同步电机、锂离子电池组和离合器,驱动电机端增加变速箱.
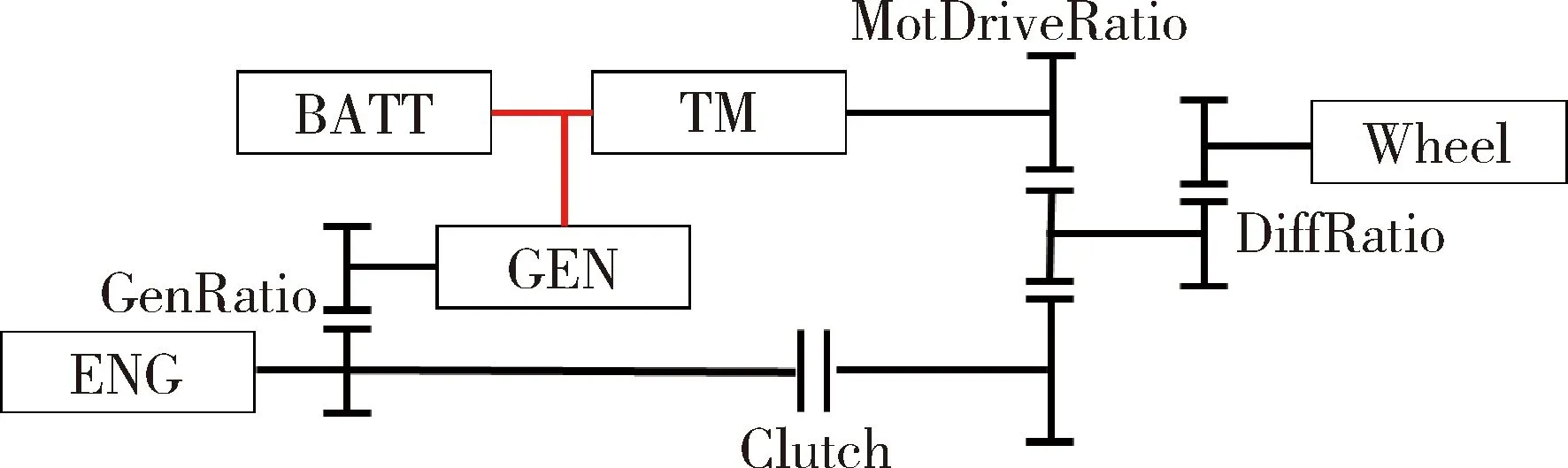
图1 多模混合动力结构
多模开关混合动力系统在运行过程中有三种模式:电动模式、混合动力模式和发动机模式.具体模式可根据车辆速度、目标驱动力和SOC可变范围来选择.
仿真平台框架如图2所示.采用来自驾驶周期的参考车速作为输入信号,由驾驶员模型根据参考速度与实际速度之差输出踏板加减速命令信息.车辆控制器采用规则型能量管理策略,将不同运行方式下的驱动力矩分配给发动机、发电机和电机.将驱动扭矩信号输入到车辆纵向动力学模型中.最后,车辆动力学模型计算车辆在纵向方向的加减速信息,输出仿真的车辆速度.

图2 仿真平台框架图
发动机模型的建立是根据发动机的试验数据,通过插值和查表读取数据得到燃油消耗率,用一阶惯性描述柴油机扭矩的动态特性.图3为发动机特性图.
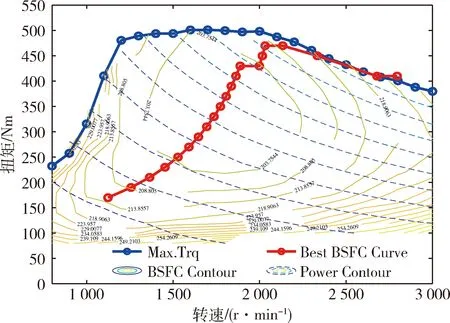
图3 发动机特性图
(1)
式中,mfuel(kg/s)为燃油消耗率;TEng(Nm)为发动机输出扭矩;Ne(rpm)为发动机转速。
驱动电机模型输入电池电压信号,电机反馈速度信号,电机在扭矩指令信号,输出电机电流信号和电机扭矩信号。电机效率ηmot和扭矩Tmot、转速MotSpd的关系如下:
ηmot=f(MotSpd,Tmot).
(2)
根据电机效率图可以得到电机的电能损耗PLoss,电机转速与扭矩的成绩就是电机的机械功率PMech。电机电流如下:
(3)
发动机、驱动电机主要参数见表1:
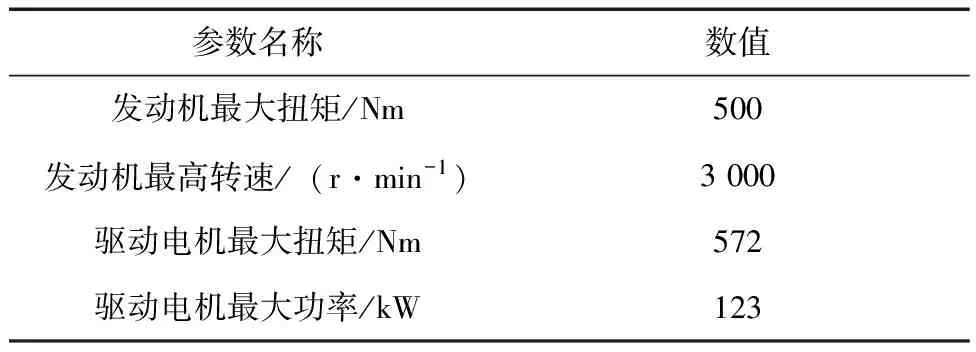
表1 驱动系统参数
根据等效电路原理建立电池模型.输入信号为电池电流、电池容量和电池温度,输出信号为电池电压和电池SOC.电池模型见图4:
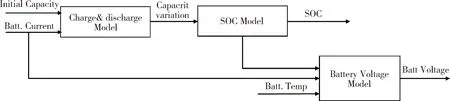
图4 电池模型
传动系统主要包括发动机侧的单齿轮箱模型、电机侧的三级齿轮箱模型和扭矩联轴器。离合器合上时,系统处于ENG模式,传动轴3处的输出扭矩Tout为:
Tout=Tin·N+Tmot·MotDriveRatio.
(4)
离合器分开时,系统处于EV或HEV模式,输出扭矩Tout为:
Tout=Tmot·MotDriveRatio.
(5)
Tin为离合器后的输出扭矩,N单齿轮箱传动比,MotDriveRatio为电机侧的传动比。换挡策略见图5:
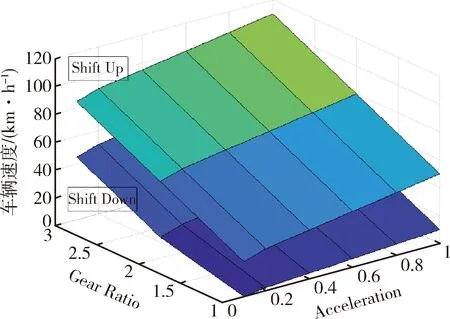
图5 换挡策略
车辆瞬态动力学模型包含三个自由度,分别为X、Z方向上的运动和Y方向上的旋转运动.模型输入为整车驱动力信号,输出为整车在不同方向上的加速度和速度信号.车辆运动模型示意图见图6:
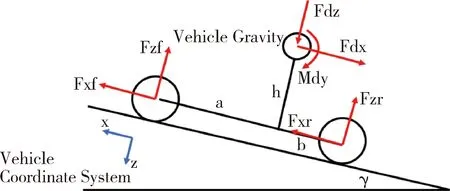
图6 车辆运动模型
车辆动力进程可由下列式子表达:
(6)
(7)
(8)
(9)
(10)
(11)

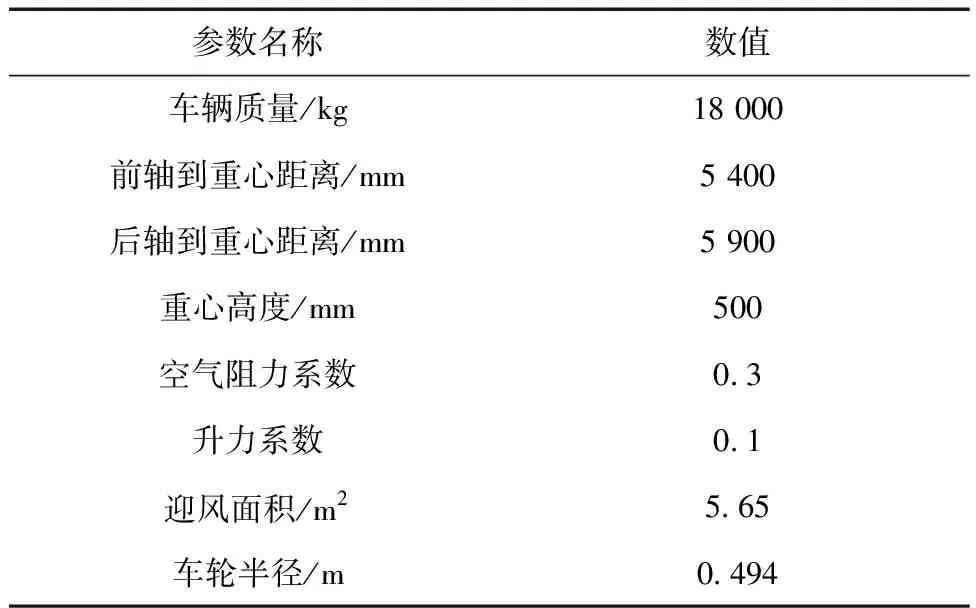
表2 混合动力车辆参数
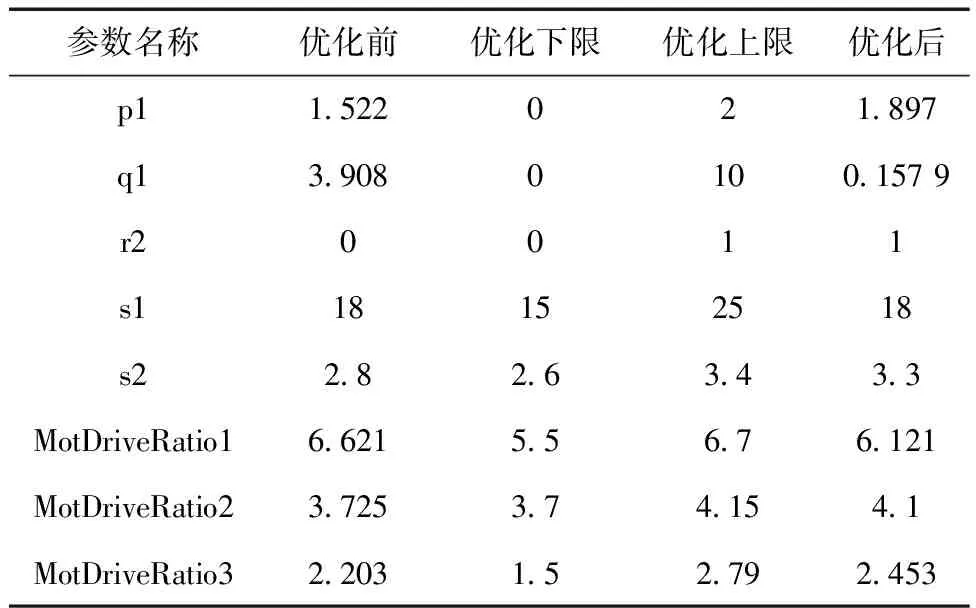
表3 混合动力车辆参数
1.2 控制策略设计
为了达到实际应用的目的,控制器采用了基于确定规则的控制策略.系统控制框图分为控制器部分和设备部分.控制器部分处理输入信号,输出电机扭矩、发动机扭矩、发电机扭矩和其他命令.输入命令信号以驱动车辆.传动系统和车辆运动模型将车辆速度、电机速度、发电机速度反馈给控制器,从而形成闭环控制.
发动机工况点的选择是决定纯发动机模式(ENG)和串联模式(HEV)下燃油经济型水品的关键因素,发动机的候选工况点位于最小油耗线上(红线),如图3所示.
当SOC>55时,HEV模式执行放电策略:HEV模式执行充电策略,充放电模块控制策略如下:
(1)放电模块
当电机Pmot所需电力功率满足式(12)时,发动机应在最大功率点。
Pmot>max(eng.pwr)+Pbattdischarg_lmt.
(12)
当电机所需电力满足式(13)时,发动机应为最小功率点。此特殊情况下电池充电。
Pmot≤min(eng.pwr)
(13)
当电机所需电力满足式(14)时,候选发动机工作点eng.pwr应满足式(15).
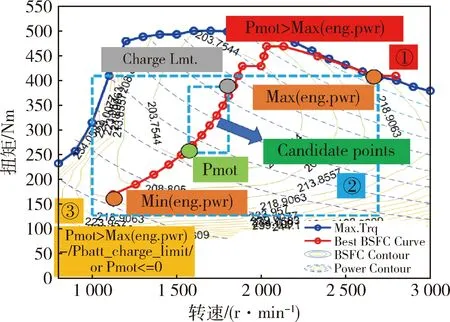
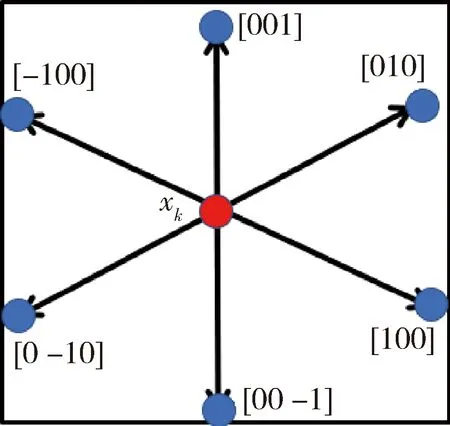
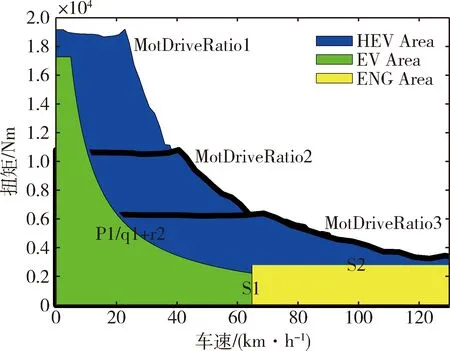
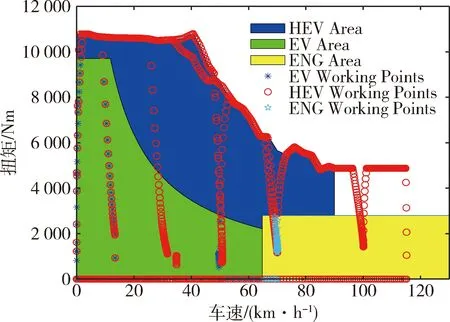
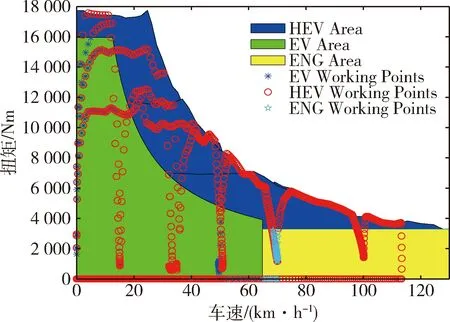
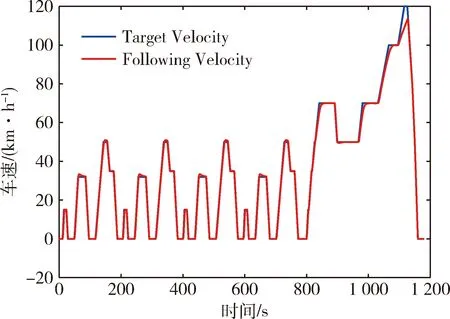
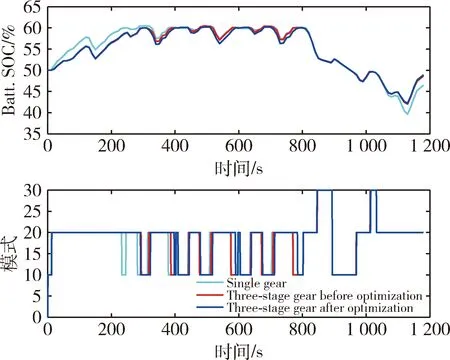
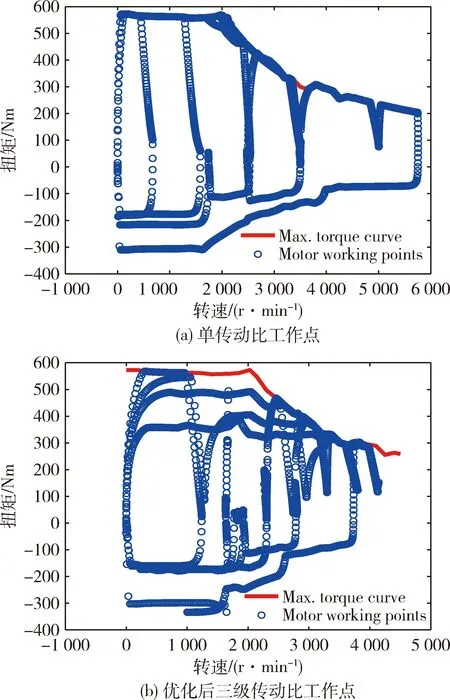
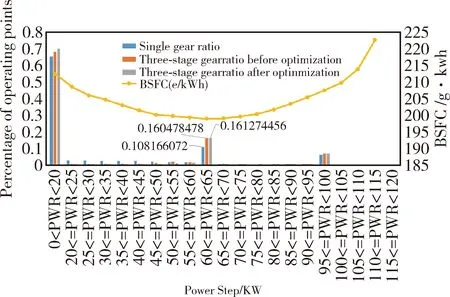
min(eng.pwr) (14) (15) 式中,Pbattdischarg_lmt为当前SOC对响应下的放电能量。 发动机工作点、电机动力需求和电池放电极限功率都在图7中体现,其中区域①②③代表了式(12),(13),(14)。 图7 放电模式下发动机工作点 (2)充电模式 当电机所需电力符合式(16)时,发动机将在最小功率点工作。 (16) 当电机所需动力符合式(17)时,发动机将在最大功率点工作。此特殊情况下电池放电。 Pmot>max(eng.pwr). (17) 当电机所需电力满足式(18)时,候选发动机工作点eng.pwr应满足式(19)。 min(eng.pwr)-|Pbattcharg_lmt| (18) (19) Pbattdischarg_lmt为当前SOC对响应下的放电能量。 发动机工作点、电机动力需求和电池放电极限功率都在图8中体现,其中区域①②③代表了式(16),(17),(18)。 图8 充电模式下发动机工作点 对于基于规则型的能量管理策略,其模式切换参数对燃油经济性的提高有重要影响。传统的基于工程经验确定的模式切换参数不能实现全局优化,且在校准时依赖于周期条件。因此,本研究采用基于全局情况的模式搜索方法,对参数选择进行了广泛的讨论。直接搜索算法在当前点周围搜索一组点并计算其目标函数值,与传统的网络搜索或非先行搜索相比,模式搜索具有方向性。通过比较目标函数在不同方向上的极值,可以找到局部或全局最优点。模式搜索方法的基本过程如下: (1)参数初始化,选择xk作为初始点进行优化; (2)选择搜索模式,在初始点周围生成新的基点。 有两种常见的模式:最大正基模式(2N)和最小正基模式(NP1)。如果自变量的数量为n,最大的正基模由有2n个向量,最小的正基模有2n+1个向量。本研究采用最大正基模式,每个方向上的向量称为图案的向量集vi,以f表示。图9为当前点时生成的图案的方向独立变量n=3。从最大正基模式出发,搜索6个方向。 图9 最大正基模式图像研究 (20) (3)在当前模式下生成所述的点,同时网格尺寸(步长)为Δk,表示当前初始点xk到2n个方向点的距离。 (4)计算当前初始点xk和xk+{di}的目标函数值,找出目标函数最小值对应的点。 如果f(xk+{di}) (5)根据每步的结果判断Δk进行放大或缩小。如果符合下列条件则迭代结束。 Δk (21) 本研究以NEDC循环为试验周期,以每百公里最小当量消耗为优化目标。式(22)~(25)确定每100公里的等效油耗。 (22) (23) (24) (25) 式中:Vfueleng为发动机油耗;Vfuel_equ为电力等效油耗;Ebat为耗电量;Qfuel为柴油热值;ρfuel为柴油;Vb和Ib为电池电压和电流;Vveh为车速。 如图10所示,对8个变量进行优化。 图10 模式对应区域和边界条件 边界参数包括p1,q1,r2,s1,和s2.s1表示车辆在EV区域的最大速度,s2为ENG区所需最大扭矩,p1,q1和r2为HEV区切换所需的边界参数. 电机侧三级换挡点动参数包括MotDriveRatio1,MotDriveRatio2,和MotDriveRatio3.它表示选择不同档位时车辆所需扭矩的峰值. 三种模式区和车辆工作点的分布如图11~图13所示.单齿轮比的工作点主要分布在电机最大转速对应的车辆需求扭矩极限值上.电机转速超过了选择大传动比时的极限,而小传动比时扭矩不足,因此单个传动比的覆盖面积并不理想.对三档传动比参数进行优化后,电动面积增大,混合动力面积减小,换挡到高档比时,最低档所对应的车辆所需扭矩限值增大,电机最大转速限值不会超值.因为实际的工作模式也会收到电池SOC影响.它可能在实际操作中处于其他模式,即使它位于电流区域. 图11 单传动比工作点 图12 优化前三级传动比工作点 图13 优化后三级传动比工作点 NEDC循环测试中速度跟随曲线如图14所示.红线为反馈速度,蓝线为目标间距.全过程中,模拟速度与目标速度一致. 图14 NEDC循环中速度跟随线 电池SOC和运行模式变化如图15所示.模式值1为EV模式,2为HEV模式,3为ENG模式.在仿真的前200秒,系统主要运行在HEV模式.由于电机的电力需求低,比发动机最小功率点要小,因此处于充电状态.200~800秒时,系统运行模式在EV模式和HEV模式下频繁切换,SOC在50~60之间变化.800秒后,在ENG模式下的SOC下降,因为发动机提供的扭矩不满足车辆需求,使得电机消耗电池电量来提供不足的扭矩.经过参数优化,最终的SOC可以达到较高的水平. 图15 电池SOC和运行模式的变化 电机工作点分布如图16所示.为了提高车辆的最大速度性能,要求低传动比;为了提高车辆在恒定转速区域的加速性能,需要高传动比.单传动比的确定是电机工作点集中在外曲线和高速区域,对应效率低.对三种传动比进行优化后,电机的工作点与最有工作点匹配.电机工作点位于高效区间,提高了车辆在恒定转速区域和恒定功率区域的性能. 图16 电机工作点分布 在图17中,发动机工作点很好的集中在BSFC最佳效率曲线上.各候选工作点的燃油消耗随功率的变化先减小后增大.功率等级为65 kW时,油耗最低.发动机主要工作在20 kW左右的最小功率下.这是因为在试验周期NEDC中存在较多的减速(功率回收)工况,电机工作在制动回收模式和低电力需求模式.在快速加速阶段,电机需要大量电能,发动机工作在100 kW左右.可以看出,在65 kW工况下,优化后的工作点数量较优化前的单齿比和三齿比工况有所增加.结果表明,采用参数优化后的三级传动比传动,每百公里等效油耗降低5.0%. 图17 发动机工作点分布 以一种具有多模开关的混合动力车辆为例,研究了NEDC工况下的能量管理策略和参数优化问题.可以得出以下结论: 1)设计了一种多模式混合动力车辆的整车模型,包括三自由度整车动力学模型、电机/发动机/发电机/电池模型和动力传动模型; 2)根据电机的电力需求、电池状态、电池充放电极限功率,设计了规则型控制策略,在线优化了发动机工作点; 3)通过基于全局情况的模式搜索方法对参数选择进行了优化,包括切换模式参数和传动比; 4)本研究以NEDC循环为试验循环,以最低每百公里等效油耗为优化目标,结果表明,电机侧的三级传动可以有效改善电机工作性能和发动机燃油经济性.采用参数优化后的三级传动比传动,百公里等效油耗可以降低5%.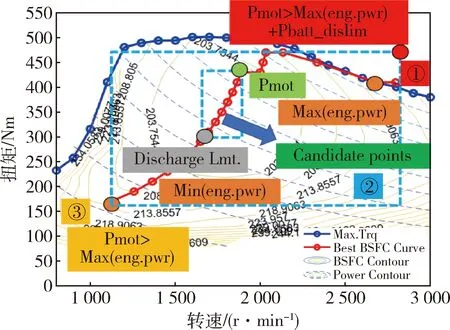
2 参数优化

3 仿真结果与分析
3 结 论
猜你喜欢
客车技术与研究(2023年6期)2023-12-19今日农业(2022年14期)2022-09-15军事文摘(2022年14期)2022-08-26科学大众(2021年21期)2022-01-18小学科学(学生版)(2021年12期)2021-12-31机械设计与制造(2021年7期)2021-07-26中国煤层气(2021年5期)2021-03-02凿岩机械气动工具(2017年3期)2017-11-22潍坊学院学报(2017年2期)2017-04-20华东理工大学学报(自然科学版)(2015年4期)2015-12-01