7自由度半主动悬架整车模型PID-LQR控制研究
2023-11-02 08:59杨秀建
车辆与动力技术 2023年3期
高 晋, 李 晖, 杨秀建
(昆明理工大学,昆明 650500)
很多学者结合不同的控制理论方法,对半主动悬架的控制策略展开研究,比如运用PID控制、LQR控制、模糊控制、自适应控制、变结构滑膜控制等对半主动悬架进行了大量的研究,每种控制方法取得的控制效果不尽相同,有研究者提出了多种控制理论结合对半主动悬架进行复合控制的思路,研究证明复合控制能够充分结合多种控制的优点,控制效果好.
文献[1]对2自由度和4自由度车辆模型车辆舒适性展开研究.文献[2]把PID和LQR控制方法互相结合,用遗传算法和单纯形法优化权重系数和整定P、I、D三个参数.文献[3]依据经验调整车身垂向加速度、悬架动位移和轮胎动行程的加权系数,确定最优控制增益K.文献[4]运用最优控制理论对4自由度半车模型进行仿真,利用simulink搭建仿真模型,并与被动悬架对比,验证了半主动悬架能够很好的改善悬架系统的工作性能.文献[5]建立了四自由度半车模型,研究了汽车通过减速带时的车速及减速带尺寸对其行驶平顺性能的影响.文献[6]对二自由度1/4模型进行研究,利用遗传算法整定P、I、D三个参数.文献[7]对四自由度半车模型进行了研究,以PID控制、LQR控制、Fuzzy控制和ANFIS控制优化的各项性能指标进行对比.
以上对半主动悬架平顺性进行研究多采用二自由度或四自由度模型,本文建立七自由度半主动悬架模型,并且加入了俯仰角加速度和侧倾角加速度两个评价指标,更能综合评价整车行驶平顺性.采用PID-LQR控制方法优化各项性能指标,并和被动悬架以及采用LQR控制的半主动悬架加以对比,对控制器设计、参数整定、优化权重等问题进行研究.
1 半主动悬架动力学模型
在车辆质量中心建立轴向X、垂向Y、侧向Z以及分别绕X、Y、Z轴方向转动的六自由度空间坐标系如图1所示,X正向为车辆的运动方向,整车七个自由度即车身沿Z轴的垂直运动、绕Y轴的俯仰运动、绕X轴的侧倾运动以及四个车轴处沿X方向的垂直运动.
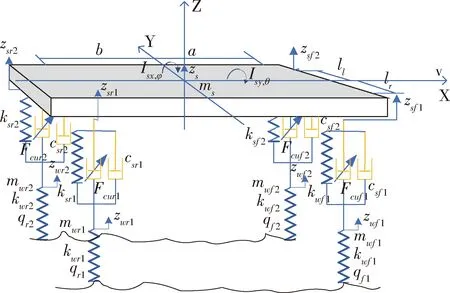
图1 半主动悬架七自由度模型示意
图中zs为车辆质心的垂直位移,φ为车身俯仰角,θ为车身侧倾角;mwf1,mwf2,mwr1,mwr2为右前部、左前部、左后部、右后部非簧载质量;kwf1,kwf2,kwr1,kwr2为右前、左前、右后、左后轮胎刚度系数;ksf1,ksf2,ksr1,ksr2为右前、左前、右后、左后悬架刚度系数;csf1,csf2,csr1,csr2为右前、左前、右后、左后悬架阻尼系数;qf1,qf2,qr1,qr2为输入到四个车轮的路面垂向位移;zwf1,zwf2,zwr1,zwr2为四个车轮的垂直位移;zsf1,zsf2,zsr1,zsr2为四个车轮上方车身的垂直位移;a,b为质心到前、后车轮轴线的距离;Ll,Lr为质心到左、右车轮中心线的距离.整车质量表示为ms,俯仰转动惯量表示为Isy,侧倾转动惯量表示为Isx,路面不平度系数表示为G0,实验车速表示为u,下截至频率表示为f0.
当车身俯仰角和侧倾角有很小的变化范围时,四个车轮上方悬挂质量端点的位移可以表示如式(1):
zsf1=zs-Lrθ-aφ
zsf2=zs-Llθ-aφ
zsr1=zs-Lrθ+bφ
zsr2=zs+Llθ+bφ.
(1)
通过对整车车身和车轴处的受力和力矩分析,对系统总动能、总耗散能以及总势能表达式应用广义拉格朗日方程表示如式(2)[8]:
(2)
可以得到汽车系统微分方程,其矩阵形式如式(3):
(3)
式中,[M]为悬架振动系统质量矩阵;[C]为阻尼矩阵;[K]为刚度矩阵.
采用滤波白噪声输入作为路面输入模型,其时域表达式如式(4):
(4)
其中w1,w2,w3,w4为均值为0、强度为1的单位高斯白噪声,用Simulink搭建仿真模型时可以直接从模块库中调用,Simulink建立的路面模型如图2.
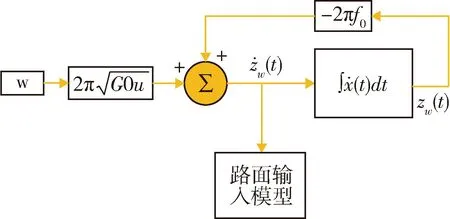
图2 随机路面输入模型示意图
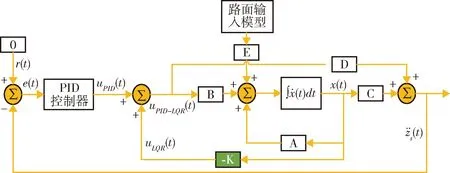
图3 PID-LQR控制模型
2 半主动悬架控制器设计
2.1 系统的状态方程
由整车运动微分方程以及路面输入模型联合得到状态空间表达式(5)[9-10]:
(5)
选择车身垂向位移、车身俯仰角、车身侧倾角、4个轮胎动位移、4个路面输入、车身垂向速度、车身俯仰角速度、车身侧倾速度、4个非簧载质量(4个车轴)垂直速度共18个变量作为系统的状态变化量,即:

选择车身垂向加速度、车身俯仰角加速度、车身侧倾角加速度、4个悬架动行程、4个轮胎动位移共11个量作为系统的输出变量,即:

选择4个阻尼调节力Fcuf1,Fcuf2,Fcur1,Fcur2作为控制向量U的分量,即:
U=(Fcuf1,Fcuf2,Fcur1,Fcur2)T.
选择四个路面输入白噪声w1,w2,w3,w4作为扰动向量w的分量,即:
W=(w1,w2,w3,w4)T.
2.2 PID-LQR控制器
PID-LQR控制原理图如下:
PID-LQ控制器的控制规律如式(6):
UPID-LQR(t)=UPID(t)+ULQR(t),
(6)
式(6)中:

经过PID Tuner整定之后的P、I、D参数值为P=0,I= 2 889.883 1,D=0.
式(6)中:
ULQR=-KX(t)
增益K由下式求出:
P由如下里卡提方程求出:
给定一个用以评价输出的各项性能指标最优性能指标函数J,当J最小时,计算出控制器最优增益K,输出四个作动器最佳控制力ULQR(t).最优性能指标函数J的数学表达式为各项性能指标加权平方和的积分,矩阵形式如式(7):
(7)
式中:Qd=CTQC;Nd=CTQD;Rd=R+DTQD.
Q和R分别表示如下:
Q=diag(q1,q2,q3,q4,q5,q6,q7,q8,q9,q10,q11);
R=diag(r1,r2,r3,r4).
式中:q1为七自由度车辆模型车身质心处垂向加速度权值,q2为七自由度车辆模型俯仰角加速度权值,q3为七自由度车辆模型侧倾角加速度权值,q4,q5,q6,q7分别为七自由度车辆模型四个悬架动行程权值,q8,q9,q10,q11分别为七自由度车辆模型四个车轮动位移权值,r1,r2,r3,r4分别为七自由度车辆模型四个作动器控制力权值.
LQR控制的关键在于选择合适的权值,计算出矩阵Q和R,然后计算出最优控制器增益K.遗传算法基本步骤为:确定种群规模、随机赋值给优化变量、计算适应度值、选择交叉变异操作[12-13].
15个性能指标权重和最佳控制器增益K如下:
q1=3.527 7,q2=811 580,q3=578 530,q4=133 170,
q5=0.318 8,q6=696 670,q7=16 984,q8=242 490,
q9=781 930,q10=577 390,q11=0.000 1,r1=0.034 9,
r2=1.725 4,r3=1.000 1,r4=1.714 7
3 半主动悬架模型的仿真模拟
设定汽车车速为20 m/s,路面类型为支路,该路况下的路面不平度系数取值范围为5×10-7~3×10-5,取均值5×10-6.行驶时会产生来自俯仰和侧倾两个自由度的车身运动,而且汽车四个车轮处路面输入互不相关;仿真步长设置为0.05,仿真时间设置为10 s,汽车以20 m/s的速度在支路行驶工况下运行Simulink仿真程序.为了研究车辆在行驶过程中的振动情况,需要得出各性能指标功率谱密度曲线.
3.1 仿真曲线
为了突出PID-LQR控制的控制效果,加入LQR控制进行对比,七自由度模型车身垂向加速度、俯仰角加速度、侧倾角加速度、右前悬架动行程和轮胎动位移性能指标时域曲线如图4~图8,功率谱密度曲线如图9~图13:
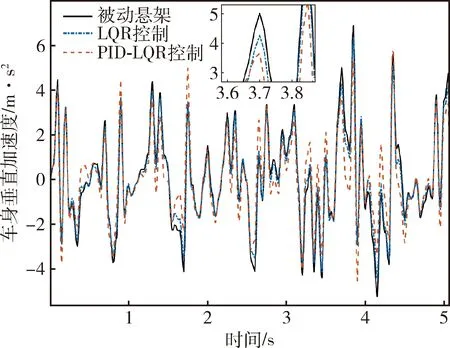
图4 车身垂直加速度时域曲线
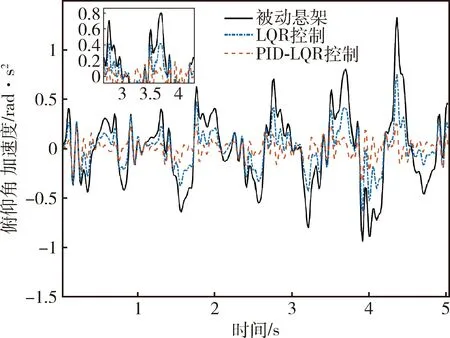
图5 俯仰角加速度时域曲线
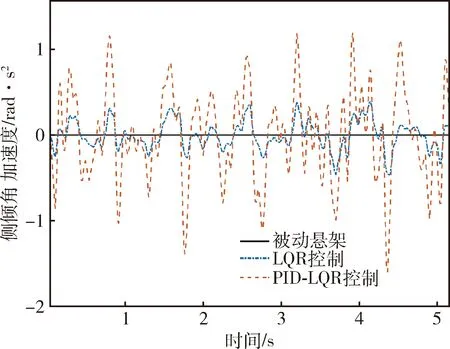
图6 侧倾角加速度时域曲线
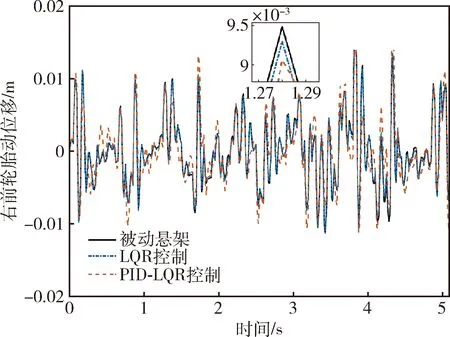
图8 右前轮胎动位移时域曲线
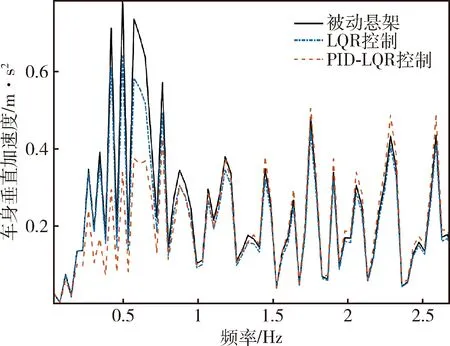
图9 车身垂直加速度功率谱密度曲线
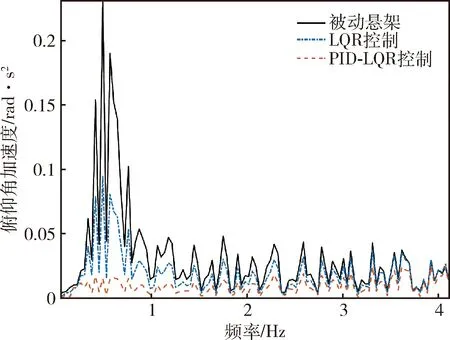
图10 俯仰角加速度功率谱密度曲线
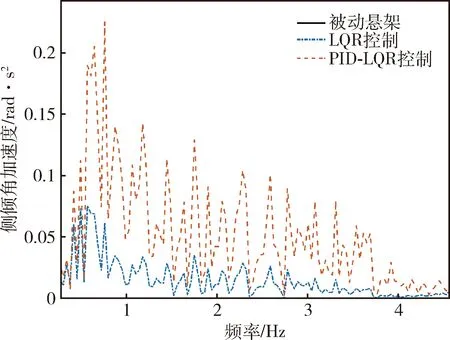
图11 侧倾角加速度功率谱密度曲线
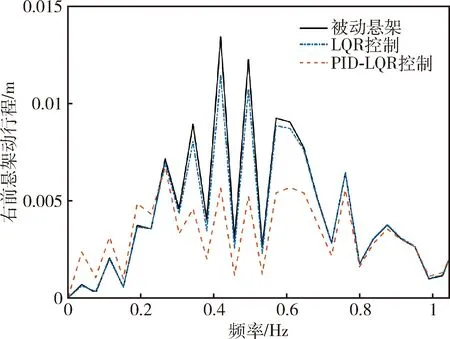
图12 右前悬架动行程功率谱密度曲线
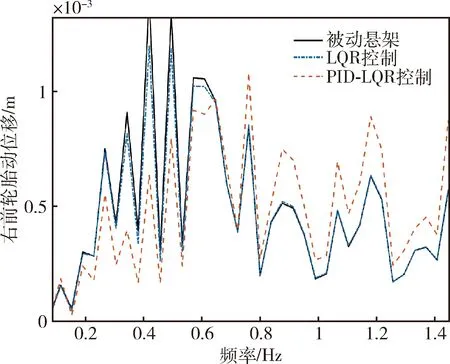
图13 右前轮胎动位移功率谱密度曲线
综合图4~图8各性能指标时域曲线可以看出,采用PID-LQR控制后,车身垂直加速度、俯仰角加速度、悬架动行程和轮胎动位移明显小于被动悬架,车身垂直加速度、俯仰角加速度和悬架动行程优化最为明显,轮胎动位移有所优化,但是效果一般,被动悬架的侧倾加速度值为零,LQR控制和PID-LQR控制得到的侧倾角加速度值不为零.总体来说,PID-LQR控制起到了很好的效果最好,各项性能指标在LQR控制的基础上有了更进一步的优化.
综合图9~图13各性能指标功率谱密度曲线可以看出,采用PID-LQR控制后,各项性能指标的功率谱密度峰值明显小于被动悬架,在频域内变化更平缓,控制效果好,轮胎动位移在低频域内控制效果较好,但是到后期没有起到太大的控制效果.
3.2 仿真结果分析
七自由度模型20 m/s支路行驶各性能指标方均根值如表1:
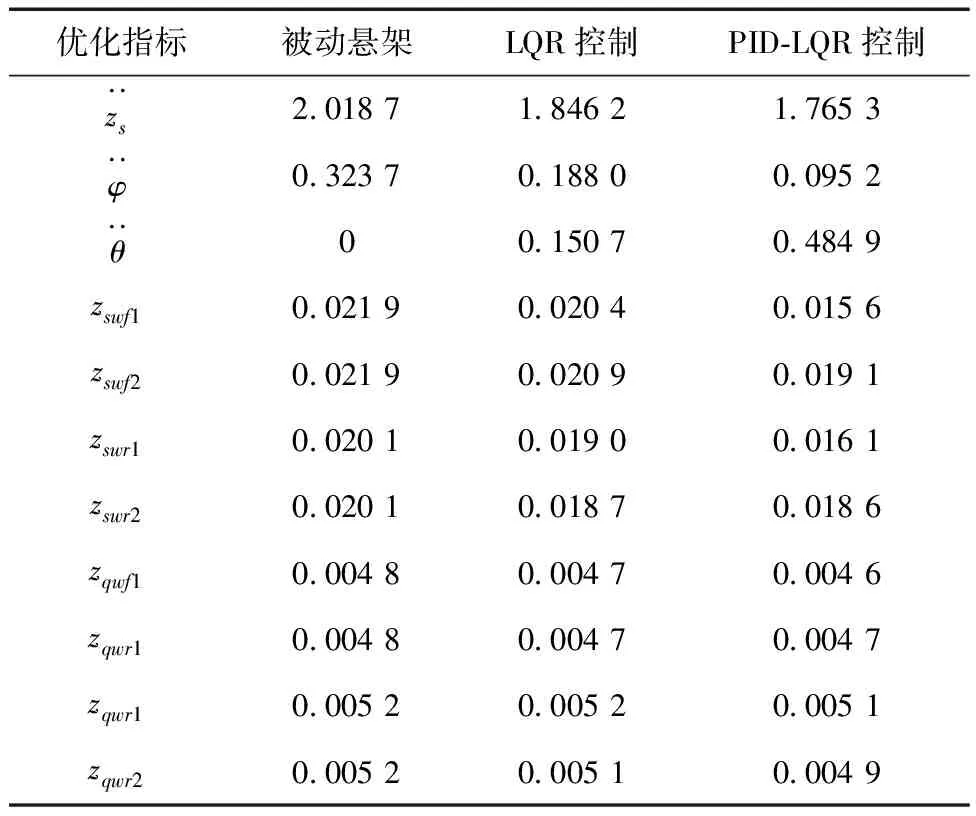
表1 七自由度模型各性能指标方均根值
LQR控制、PID-LQR控制下四个控制器输出的最大控制力如表2:
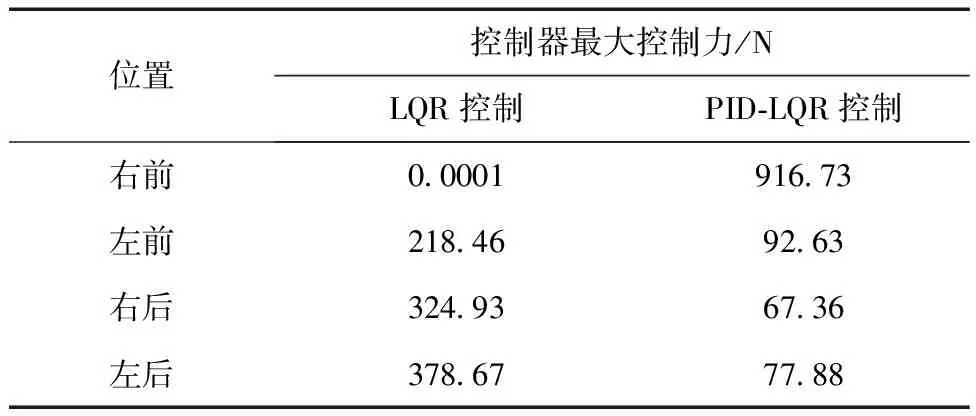
表2 七自由度模型不同控制方法控制器控制力最大值
通过表1可以看出,采用LQR控制和PID-LQR控制的半主动悬架相比于被动悬架,各项性能指标都有所优化,但是优化效果不相同,采用PID-LQR控制的车身垂直加速度相比于被动悬架下降了12.5%,相比于LQR控制下降了4.4%,俯仰角加速度相比于被动悬架下降了71%,相比于LQR控制下降了50%,右前悬架动行程相比于被动悬架了下降29%,相比于LQR控制下降了24%,右前轮胎动位移相比于被动悬架了下降6%,相比于LQR控制下降了3%,车身垂向加速度、俯仰角加速度、悬架动行程优化比较明显,轮胎动位移优化效果一般,而侧倾角加速度则有所恶化,采用PID-LQR控制后恶化更加严重.
通过表2可以看出,采用LQR控制和PID-LQR控制后,四个控制器输出的控制力不相同,LQR控制下左后悬架控制器输出的最大控制力为378.67 N,右前悬架控制器的最大输出力几乎为零,PID-LQR控制下右前悬架控制器输出的最大控制力为916.73 N,右后悬架控制器的最大输出力为67.36 N.由于四个悬架控制器控制力输出不均衡,车身左右两侧的侧倾力矩不平衡,导致半主动悬架侧倾角加速度必然存在,车身垂直加速度、俯仰角加速度、悬架动行程得到大幅度优化是牺牲了一定车身侧倾性能换来的,这也说明了各个性能指标之间相互制约,操纵稳定性和行驶平顺性之间难以同时兼顾.
4 结 论
七自由度模型采用随机路面模型作为输入,对采用PID-LQR控制的半主动悬架车辆平顺性进行分析,总结如下:
1)PID-LQR控制的控制效果取决于各性能指标权重和P、I、D三个参数值的可靠性,所以遗传算法、PID Tuner调参的可靠性对半主动悬架的控制效果起到十分重要的作用.相比于采用经验试凑法,利用MATLAB的PID-Tuner对PID参数进行整定,通过可靠性理论整定P、I、D参数避免了主观因素的影响,通过遗传算法工具箱确定性能指标权重,得到最佳控制器增益K,提高了工作效率,优化结果好.
2)运用PID控制理论和LQR控制理论设计的PID-LQR控制器,结合了PID控制和LQR控制理论的优点,复合控制效果比LQR控制和PID控制要好得多.
3)七自由度模型把俯仰角加速度和侧倾角加速度作为优化指标,建立起更加完整的车辆平顺性评价体系,仿真效果更加接近于实车,建立更高自由度的车辆模型,对车辆进行更多性能指标优化,采用PID-LQR控制后,相比于被动悬架,虽然侧倾角加速度稍微恶化,但是其余性能指标得到了显著的优化,大大提高了车辆的平顺性.
猜你喜欢
石油沥青(2021年1期)2021-04-13
装备制造技术(2020年11期)2021-01-26
液压与气动(2020年4期)2020-04-10
新课程·下旬(2018年10期)2018-01-28
制冷技术(2016年4期)2016-08-21
测绘科学与工程(2016年4期)2016-04-17
中国石油大学学报(自然科学版)(2015年2期)2015-11-10
计量学报(2014年3期)2014-06-07
电测与仪表(2014年16期)2014-04-22
振动、测试与诊断(2014年6期)2014-03-01