基于模糊自适应模型预测控制的移动机器人路径跟踪控制
2023-11-01 08:33黄正旭王斌锐
中国计量大学学报 2023年3期
黄正旭,周 坤,王斌锐
(中国计量大学 机电工程学院,浙江 杭州 310018)
目前,传统垃圾收集方式存在垃圾外散、出现满溢、异味外泄及长时间未清理造成二次环境污染,以及固定式垃圾收集点占用空间大等问题[1]。采用移动机器人实现定时定点投放、收集和运输,对于降低垃圾分类收集成本、提高垃圾转运效率、避免二次环境污染、减少垃圾收集空间占用具有重要意义。移动机器人可以定时定点进行垃圾收集工作,沿着指定的路径进行移动,而要避免移动到不必要的区域,就需要具有良好的路径跟踪性能。路径跟踪的目的是确保机器人能够被引导到期望路径上,并且横向误差尽可能小[2]。其中,路径跟踪精度和转向平稳性是设计路径跟踪控制器的两个关键指标。但是两者并不是绝对的,要根据实际运行情况,合理选择侧重指标,能够有效提高整体控制效果。
针对移动机器人路径跟踪问题,国内外学者进行了大量研究,开发出多种路径跟踪控制器。Zheng等[3]、Mai等[4]构建PID控制器用于处理移动机器人的路径跟踪问题,但面对复杂工况时,较难实现对路径跟踪的最优控制[5]。LQR控制器不考虑移动机器人运动学或者动力学约束,在一定工况下,容易使得机器人出现侧偏失稳现象[6]。纯追踪控制器很难为移动机器人选择合适的前瞻距离,存在两个连续控制周期下输出不连续转向角的问题。因此存在较大的航向误差和横向误差,跟踪不稳定[7]。针对这些不足,模型预测控制(model predictive control, MPC)可以解决多变量、多约束的系统问题[8],因此在路径跟踪领域得到大量应用。
传统的MPC控制器权重系数为常数,当路径曲率较大或者移动机器人远离期望路径时,路径跟踪精度或转向平稳性变差。文献[9]中引入随道路曲率变化的速度自适应调节算法,自动更新目标函数中的模型参数,减小轨迹跟踪的误差。文献[10]中MPC控制器根据路径曲率调整采样时间,预测时域随着线速度和初始偏差的变化进行调整,以提高跟踪精度。
常见的MPC控制器设计大多考虑跟踪精度,而忽略了在某些特定场景下转向平稳性的优化。本文针对此问题设计一种改进的MPC控制器,该控制器采用模糊控制器自适应地调整目标函数的权重系数。模糊控制器以移动机器人的横向偏差、航向偏差和路径曲率作为模糊控制器的输入,以权重系数的调节因子作为模糊控制器的输出。最后通过MATLAB仿真测试改进的MPC控制器路径跟踪性能。
1 移动机器人MPC控制器设计
模型预测控制使用当前和过去的偏差值,并且还使用预测模型来预测路径跟踪过程中的偏差值。当前最优控制策略由滚动时域优化确定,使未来一段时间内被控变量与期望值的偏差最小,有效处理多约束问题。模型预测控制控制器一般由预测模型、目标函数、滚动优化和反馈校正四部分组成[11]。
1.1 预测模型
本文所使用的移动机器人为四轮差速控制。机器人工作时,运动速度较慢,在运动过程中可以忽略侧滑、侧倾等影响稳定性的因素。因此,利用运动学模型设计的路径跟踪控制器具有良好的路径跟踪性能。
假设移动机器人的本体是刚体且车轮不发生变形,机器人在平面上运动、不打滑,即车轮和地面之间为纯滚动。在此理想条件下,以机器人中心为参考点,建立移动机器人的运动学模型,如图1。图中:XOY为全局坐标系,xoy为机器人坐标系,φ为机器人航向角。
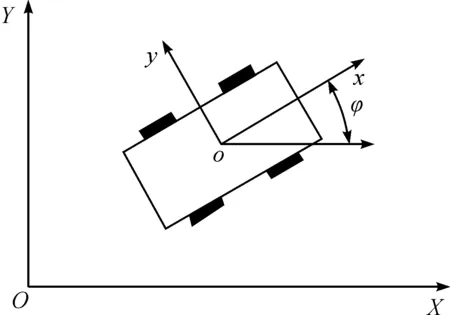
图1 移动机器人运动学模型Figure 1 Kinematic model of mobile robot
由图1可知,在机器人中心处:
(1)
选取状态量x=[xyφ]T,控制量u=[vw]T,简化式得到机器人运动学模型为
(2)
式(2)中,v为机器人线速度,w为机器人角速度。
根据运动学模型可以将系统表示为
(3)
给定的期望路径上的每一个期望路径点,均符合机器人运动学模型,用r代表期望量,则期望路径表示为
(4)
利用式(2)所建立的非线性机器人运动学模型预测机器人未来状态量,需要占用大量的计算资源。因此需要对模型进行线性化处理,将式(4)在每一个期望路径点按照一阶泰勒级数展开,得到
(5)
用式(5)减去式(4),展开偏导数,整理得到
(6)
将非线性系统转换为状态误差为状态量和控制量误差为控制量的连续函数,不能直接用于计算机计算处理操作,必须要转换为离散化方程[12]。在此采用前向欧拉法对系统进行离散化,得到
(7)
整理得到
(8)
式(8)中,T为采样时间,

(9)
新的机器人状态空间表达式为
(10)
此时,系统控制量方程如下:
Y=ψξ(k)+θΔU(k)。
(11)
式(11)中,Nc为控制时域,Np为预测时域,
1.2 目标函数
在路径跟踪过程中,机器人的控制目标是尽可能靠近目标路径,并获得转向的稳定性,同时机器人的控制量变化也尽可能流畅,定义目标函数如下:
J=(Y-Yref)TQ(Y-Yref)+ΔUTRΔU+ρε2。
(12)
式(12)中,Yref为期望值,Q为状态量权重系数矩阵,R为控制量权重系数矩阵,ε为松弛因子,ρ为松弛因子加权系数。
1.3 滚动优化
MPC控制器的优化控制是一个持续在线优化过程,在系统的每一个采样周期都会对目标函数进行一次优化计算。将目标函数转化为二次规划问题进行求解。定义一个偏差e,e的表达式为
e=ψξ(k)-Yref。
(13)
联立式(11)、式(12)和式(13),化简为二次规划标准型,得到
(14)

在目标函数的求解过程中,要考虑机器人的物理约束,将控制量和控制量的增量限制在合理的范围内[13],其约束条件如下:
(15)
式(15)中,ΔUmin为控制量增量的最小值,ΔUmax为控制量增量的最大值,Umin为控制量的最小值,Umax为控制量的最大值。
1.4 反馈校正
在每个控制周期内,根据约束条件,采用二次规划器求解目标函数,在控制时域内计算出一系列最优控制输入增量
ΔU(k)=
[Δu(k),Δu(k+1),…,Δu(k+Nc-1)]T。
(16)
将式(16)的第一个元素作用于系统,实际系统控制输入量u(k)=u(k-1)+Δu(k)。
在下一时刻,重新计算最优控制输入,以达到对系统的持续控制[14]。
2 权重系数模糊自适应整定
在采用传统固定权重系数MPC控制器的路径跟踪实验中,当移动机器人远离目标路径时,由于过于追求跟踪精度,机器人角速度在短时间内急剧修正,从而影响机器人运动控制的稳定性。而增大状态量权重系数可以提高转向平稳性,但会带来跟踪精度下降的问题。基于此,设计了一种权重系数模糊自适应调节的MPC控制器,该控制器能够根据机器人横向误差、航向误差和路径曲率,对目标函数的权重系数进行自适应整定,以保证跟踪精度和转向平稳性。
根据模糊控制器设计,定义了3个模糊控制输入,包括机器人横向误差eY、航向误差eφ和路径曲率ρ。定义两个模糊控制输出状态量权重系数调节因子λQ和控制量权重系数调节因子λR。考虑机器人在路径跟踪时实际工作状态,模糊控制器的横向误差和航向误差输入可以模糊化为5个模糊集:NB(负大)、NS(负小)、ZO(零)、PS(正小)、PB(正大)。考虑路径曲率输入和权重系数输出总是为非负的,路径曲率输入和权重系数输出模糊化为四个模糊集:ZO(零)、PS(正小)、PM(正中)、PB(正大)[15]。根据实际控制经验,横向误差输入和输出选用高斯型隶属度函数以提供更加准确的隶属度值和更强的适应性,而对于航向误差输入和路径曲率输入需要更加灵敏,因此选用三角形隶属度函数[16]。与模糊控制器相关的隶属度函数如图2。
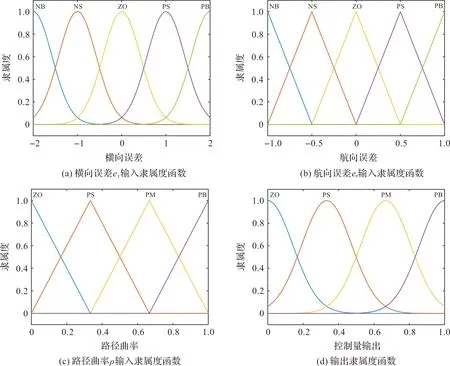
图2 模糊控制器输入和输出隶属度函数Figure 2 Fuzzy controller input and output membership function
模糊规则库包含考虑输入与输出之间相互关系的模糊规则,这些规则是根据权重系数对跟踪效果的影响和实际控制经验所构造,如表1、表2。
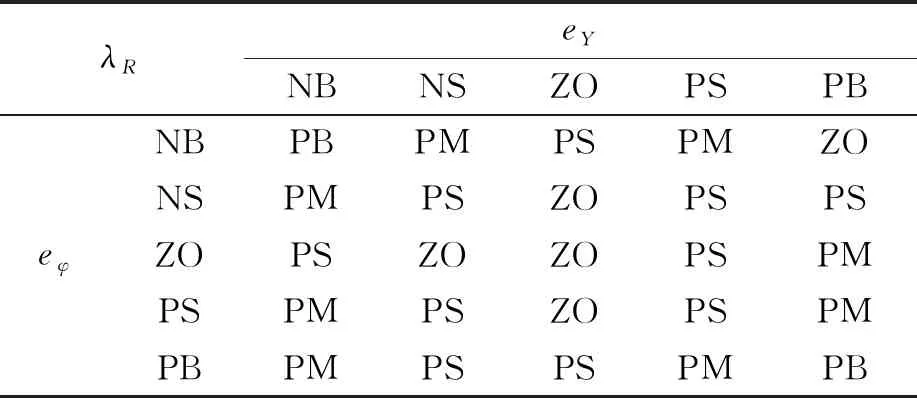
表1 控制量权重系数调节因子λR模糊规则
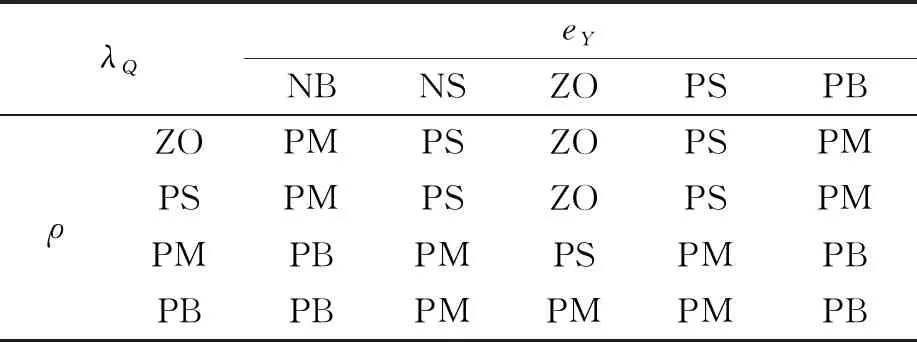
表2 状态量权重系数调节因子λQ模糊规则
图3给出模糊规则下输入与输出关系的响应曲面。通过以上模糊规则,当机器人远离期望路径时,增加控制量的权重系数,以确保机器人在接近期望路径的过程中,保持转向的稳定性,牺牲一定的跟踪精度。当机器人基本接近期望路径时,在路径曲率变化较大的情况下,通过增大状态量的权重系数以减小横向误差,提高跟踪精度。
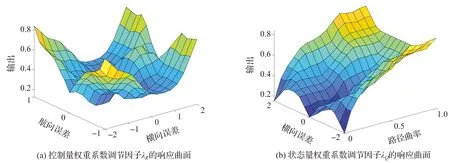
图3 模糊规则下输入和输出的响应曲面Figure 3 Response surface of input and output under fuzzy rules
Q、R矩阵权重系数调节算式为
Rw=Rw0×8λR,
(17)
Qx,y=Qx0,y0×4λQ。
(18)
式(17)和式(18)中,Rw0、Qx0,y0分别为原MPC控制器权重系数,Rw、Qx,y分别为模糊自适应整定的MPC控制器权重系数。
3 仿真实验
为了验证改进后的MPC控制器的性能,在MATLAB上建立仿真系统,比较传统的MPC控制器与本文改进的MPC控制器。考虑移动机器人的实际运行场景,跟踪直线和双移线组成的复合路径[17]。考虑移动机器人实际运行时状态,设定MPC控制器参数为Np=20,Nc=15,T=0.05 s,ε=10,机器人初始位置坐标为(0,3),初始线速度为1.0 m/s,初始角速度为0。期望路径起始点为(0,2),初始位置机器人与期望路径的横向偏差为1 m,航向角偏差为0。相应的实验结果如图4。

图4 路径跟踪仿真结果Figure 4 Path tracking simulation results
从图4(b)中可知,传统的MPC控制器在路径跟踪过程中盲目追求跟踪精度,导致机器人在远离目标路径时,角速度在短时间内出现高频变化。改进后的MPC控制器通过模糊控制器对目标函数的权重系数进行自整定。当横向误差过大时,增加了角速度增量的权重系数,以保证机器人平稳地接近期望路径,改进后的MPC控制器角速度变化更加平稳。当然,这会导致部分跟踪精度损失(横向误差最大差约0.08 m),从而导致平均横向误差的增大,如图4(a)。改进的MPC控制器在接近预期路径后,具有更小的横向误差,如图4(c)。表3给出了控制器性能比较分析。
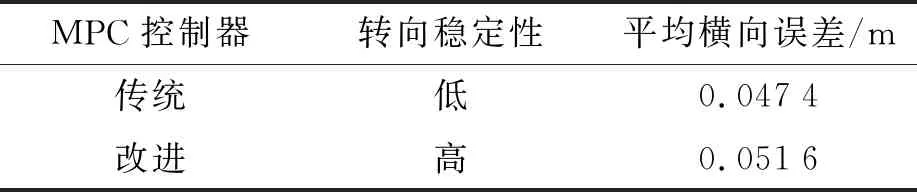
表3 控制器性能分析
在保证一定跟踪精度的情况下,改进的MPC控制器保证了整个路径跟踪过程中机器人转向的稳定性。
4 结 语
针对移动机器人路径跟踪精度与转向稳定性矛盾的问题,设计了一种权重系数自适应整定的MPC控制器。该控制器在传统MPC控制器的基础上进行优化,引入模糊控制器,使MPC控制器中的目标函数权重系数可以根据机器人横向偏差、航向偏差和路径曲率的变化进行自适应整定。
通过MATLAB仿真验证该控制器的有效性。通过仿真测试,得出以下结论。
1)该控制器具有较高的跟踪精度。
2)改进后的MPC控制器保证了在机器人远离目标路径时,转向控制的平稳性。
3)当机器人离期望路径较近,在道路曲率变化较大时,减小机器人的横向误差。
目前的研究只针对固定路径下的跟踪效果,将路径规划与路径跟踪结合起来是实际应用中的一大研究重点。
猜你喜欢
中国港湾建设(2022年12期)2022-12-28
数学物理学报(2022年4期)2022-08-22
北京航空航天大学学报(2022年6期)2022-07-02
当代陕西(2020年17期)2020-10-28
数学物理学报(2019年5期)2019-11-29
人大建设(2018年5期)2018-08-16
电信科学(2017年6期)2017-07-01
制造技术与机床(2017年3期)2017-06-23
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28
中国海洋大学学报(自然科学版)(2014年7期)2014-02-28