
基于微分对策的非仿射导弹学习滑模制导
2023-10-29 14:17:24高煜欣刘春生
系统工程与电子技术 2023年11期
高煜欣, 刘春生
(南京航空航天大学自动化学院, 江苏 南京 211106)
0 引 言
导弹防御系统作为国防系统的重要组成部分,被广泛研究[1]。制导策略作为其重要的组成部分,不仅影响导弹的运动特性,同时还直接决定导弹控制系统的设计。当前针对制导策略的研究已取得了许多成果,如比例导引法[2-4]、滑模制导法[5-7]、反步制导法[8-10]等。在制导过程中,由目标机动等因素引起的非理想制导因素广泛存在,直接影响制导精度。因此,研究遭受不确定影响条件下的制导策略具有实际意义。
针对制导系统中的不确定因素,一种有效的方式是对其进行估计与重构[11-13]。文献[11]针对部分动态未知的制导系统,结合神经网络逼近未知动态,设计了一类前馈和反馈相结合的复合制导策略,实现机动目标的拦截。针对未知目标机动,文献[12]利用扩张状态观测器估计目标速度,设计比例导引滑模制导策略,成功拦截机动目标。考虑建模误差与不确定项,文献[13]使用干扰观测器估计未知因素,并结合反步控制与滑模理论,设计了一类针对探导控一体化系统的制导方法,实现对目标的跟踪。考虑未来战场跨空域、强电子对抗的作战环境,目标机动等非理想制导因素往往难以测量与重构,显然上述制导策略无法适用。
微分对策是一种研究双方或多方最优控制的理论,在导弹拦截制导问题中得到了广泛应用[13-15],导弹和目标机动相互独立,将其视为对抗双方,利用偏微分方程组来描述制导策略的变化,一方寻求性能指标最大化,另一方则寻求最小化,研究目标机动最坏情况下的制导策略。文献[13]针对输入输出受限的导弹拦截系统,提出了一类前馈控制和微分对策相结合的制导策略,保证了成功拦截机动目标的同时满足约束条件。为了处理带有扰动情况下的制导问题,文献[14]提出了一类有限时域微分对策制导方案,建立时变性能函数并考虑终端约束,保证制导性能;在针对带有防御弹的三方对抗问题中[15],微分对策制导律可以实现导弹避开防御弹的同时击中目标。上述研究取得了很好的成果,然而无论是文献[13-14]的非线性系统,还是[15]的线性系统均是仿射形式,在实际系统中,非仿射形式普遍存在,因其对控制的非仿射特征使得控制策略的设计变得困难。
目前,处理非仿射系统的思路主要分为两类,一类是利用辅助函数或中值定理,将系统转化为仿射形式,从而便于控制器的设计;另一类是直接从原系统分离控制线性项。文献[16]针对二阶非仿射系统,分离控制线性项,提出一类滑模控制策略。考虑中值定理,文献[17]将非仿射非线性多智能体系统转化为控制仿射形式,利用努斯鲍姆函数处理未知控制方向。此外,文献[18-20]利用模糊技术、自适应技术等实现了非仿射系统的控制。虽然上述成果成功克服了非仿射特性导致的控制策略设计困难问题,然而鲜有考虑系统的最优特性。
综上所述,本文提出一类基于微分对策的非仿射导弹学习滑模制导方法,将导弹与目标视为对抗双方,结合控制补偿技术,引入辅助控制输入,分别设计自适应滑模策略鲁棒匹配扰动、微分对策最优控制策略处理非匹配部分,利用评价网络并给出权值更新律,在线学习控制策略,在保证系统实现滑模控制的同时满足滑动模态的最优性能。与传统滑模制导方法相比,本文制导策略不仅可以有效处理非匹配扰动、降低对目标机动信息的依赖,而且可以满足性能指标,有利于工程应用。
1 问题描述
考虑如下不确定非仿射非线性系统:
(1)
式中:x(t)∈Rn为系统可测状态向量;f(x(t),u(t))∈Rn×Rm→Rn为已知连续且对控制输入u(t)∈Rm为非仿射形式的系统函数;k(x(t))∈Rn×p为已知连续函数;δ(t)∈Rp为由目标机动导致的系统不确定项。为方便表达,省略时间常数t。
由于系统(1)的结构表现为控制非仿射形式,使得控制器设计变得困难。因此,引入控制补偿技术[21-22],构建如下辅助系统:
(2)

(3)

假设 1系统函数k(x)有界,即存在常数kM满足=k(x)=≤kM。


(4)

本文的目的为设计辅助控制输入vm使得系统(1)的所有信号有界,为实现该目标,控制输入设计为如下形式:
vm=va+vb
(5)
式中:va为非连续滑模控制部分,用于处理未知输入匹配部分并实现滑模控制;vb为连续最优控制部分,用于实现存在未知输入非匹配部分下的最优控制。
2 控制器设计
2.1 滑模控制器设计
本节设计va鲁棒匹配扰动部分,并且使得系统沿着如下积分滑模面进入滑动模态运动:
(6)

滑模面(6)对时间求导有:
(7)
基于系统(3)和滑模面(6),设计如下自适应滑模控制器va:
(8)
定理 1针对增广系统(3),若设计非连续滑模控制器及自适应律为(8),则增广状态将沿着预设的积分滑模面(6)进入滑动模态运动。

(9)
将式(9)求导并代入式(7)和控制器(8)可得
(10)

证毕

(11)
等效控制被抽象的应用于式(3),从而实现如下增广等效滑动模态系统:
(12)

2.2 微分对策控制器设计
观察式(12)可以发现,增广等效滑动模态系统仍然存在未知扰动,且为非匹配形式,使得控制器设计变得困难。为有效处理非匹配扰动,首先,考虑如下性能指标:
(13)

(14)

根据极大极小值原理,纳什均衡解存在的必要条件是:
(15)
则利用贝尔曼最优原理,可推导微分对策控制策略为
(16)
则将最优控制式(16)代入式(14)有
(17)
为了能够有效实施微分对策控制策略,设计如下评价网络近似式(17)的解析解:
(18)
式中:W为神经网络理想权值;φ为设计的系数矩阵;ε为神经网络逼近残差。如果定义:
(19)
则有
(20)

(21)

(22)
利用神经网络输出估计式(17)解析解,则有
(23)
近似控制策略对和哈密顿函数分别为
(24)

(25)
假设 4理想权值有界WM,即=W=≤WM。残差均有界,即满足关系=ε=≤εM,=εHJI=≤εHM。

(26)
基于梯度下降,设计如下权值更新律:

(27)

(28)

证明考虑如下Lyapunov函数:
(29)
首先对第一项求导,得
(30)
接着,对第2项求导可得
(31)
考虑如下变换:
(32)
(33)
式中:
合理的T1和T2可以保证N1为正定矩阵,进而有
(34)
根据规则(28),接下来分为两种情况讨论:
情况 1Θ=0
(35)
(36)
(37)
不难得到权值估计误差有界,且满足:
(38)
情况 2Θ=1
则式(34)变为
(39)

(40)
(41)

(42)
证毕
定理 3针对增广系统式(3),滑模控制器设计为式(8),微分对策控制策略设计为式(24),则在整合学习滑模控制器(5)作用下,系统(1)的状态有界。

(43)


(44)

证毕
3 导弹制导验证
本节验证所设计制导策略的有效性,将本文理论应用于二维平面导弹拦截机动目标的场景中,运动示意图如图1所示,基于几何关系,建立导弹-目标相对运动关系:
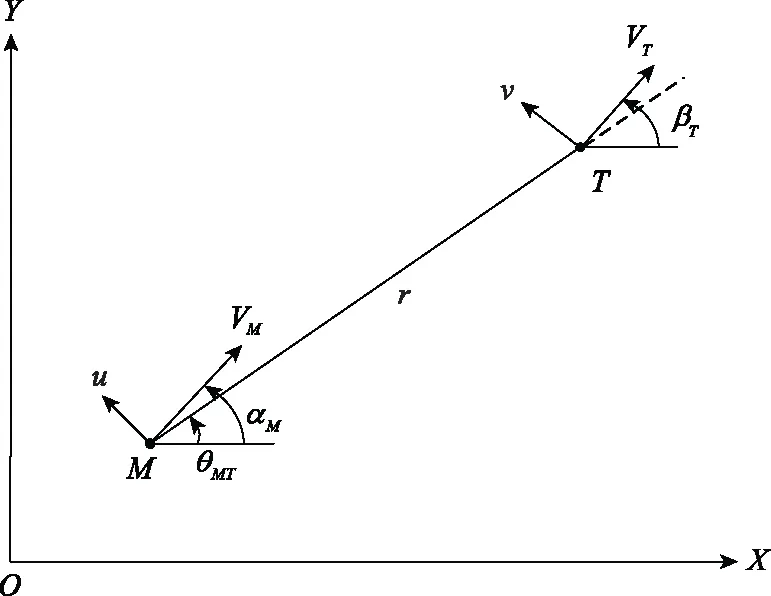
图1 导弹-目标运动示意图
(45)
导弹与目标均表现为一阶自动驾驶仪系统,满足动态:
(46)
相关参数含义如表1所示。
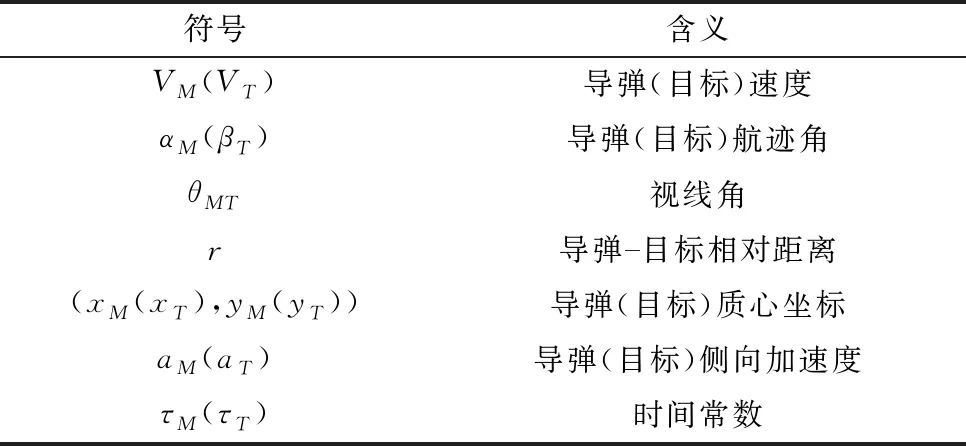
表1 相关参数

(47)

结合滑模控制(8)与微分对策技术(24),制导策略vm设计为如下形式:
vm=-asgn()-k1==lsgn()-k2
(48)
由式(47)可以发现,当导弹足够接近目标,即r→0时,系统被破坏。事实上,在实际制导过程中,存在最小相对距离rmiss,即脱靶量。当r≤rmiss时,制导结束,导弹依靠惯性完成剩余任务,视为拦截成功[27-28]。因此,本节验证所提算法能否实现对相对距离要求,且满足如下必要条件:
(49)

3.1 仿真结果分析
导弹拦截轨迹图如图2所示,可以看到,在学习滑模控制策略(5)的作用下,经过一段时间后,导弹能够成功击中目标。相对距离曲线如图3所示。从初始时刻的1 250 m左右,经过大约4.8 s,减少至1.697 m,由文献[29]可知,在合理脱靶量范围内。图4、图5则是刻画导弹视线角速率和导弹目标的相对速率图,可以看到,在整个制导过程中,视线角速率始终在零点附近,相对速率始终为负值,显然,保证拦截成功的必要条件(48)被满足,则导弹可以成功拦截目标。基于控制补偿技术,系统的辅助输入曲线如图6所示,图中曲线逐渐收敛,且在合理范围内。在权值更新律(27)的作用下,神经网络权值估计值曲线如图7所示。在局部放大图中可以看出,经过一段时间后,权值估计值曲线逐渐趋于稳定,验证了权值估计误差的有界性,从而保证了最优微分对策控制策略的在线学习。综上,本文所提出的控制策略能够有效处理非仿射形式,并且使得导弹能够成功拦截目标。

图2 拦截轨迹图
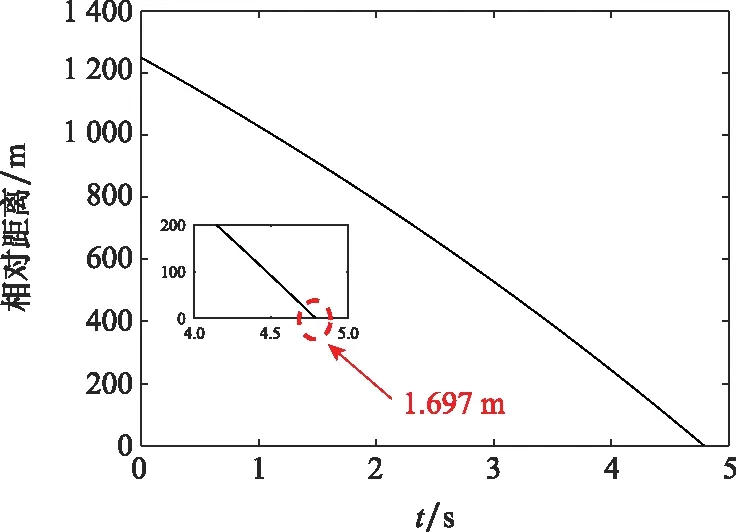
图3 相对距离图

图4 导弹视线角速率
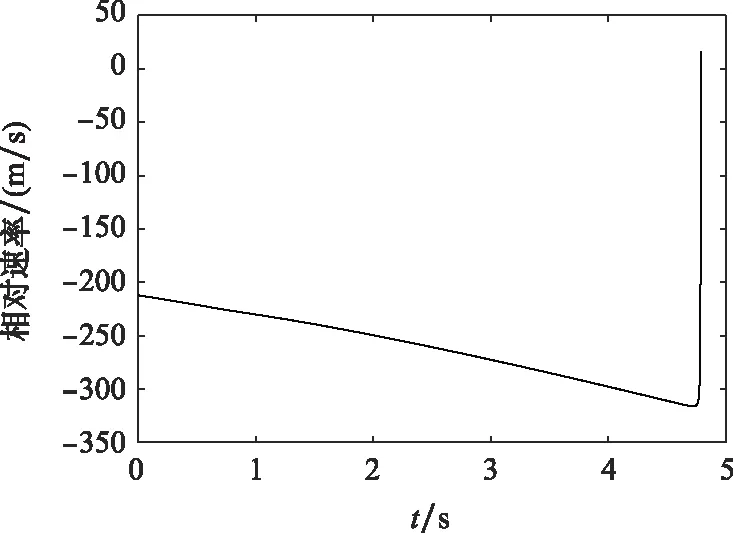
图5 导弹-目标相对速率
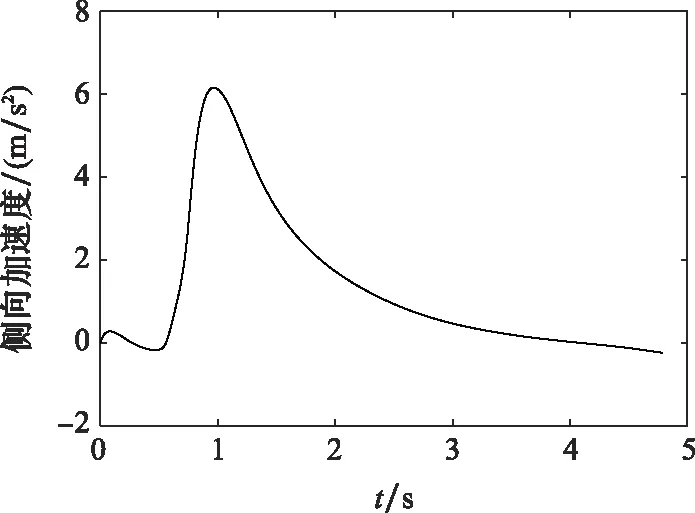
图6 导弹侧向加速度

图7 神经网络权值估计值
在导弹的制导过程中,导弹参数的测量误差不可避免,这会导致导弹的弹道与理想弹道产生偏差。因此,进行蒙特卡罗打靶试验验证制导精度,引入满足正态分布N(0,0.1)的导弹视线角随机测量误差ΔθMT,进行50次打靶试验,并对导弹的弹着点数学期望进行统计,统计结果如表2所示。从表中可以看出,在存在测量误差的情况下,50次打靶试验弹着点在本文考虑的二维拦截平面中x轴和y轴的期望弹着点和理想弹道(即无测量误差)的弹着点非常接近。并且,圆偏差概率(circular error probable, CEP)[30]计算为1.86 m,可以保证导弹超过一半的概率弹着点位于圆内。因此蒙特卡罗试验结果表明本文算法具有较高的制导精度。

表2 弹着点期望值统计
3.2 对比仿真与结果分析
为进一步体现本文所提算法的优势,选择比例导引算法与经典积分滑模算法[31-32]进行对比验证。显然,针对非仿射制导系统,两类对比方法无法直接应用。因此,同样引入控制补偿技术,构建仿射增广系统,便于进行对比试验。进一步,考虑比例导引算法的实施需要目标机动信息,则在比例导引制导过程中,目标机动信息设置为实时可测。在传统积分滑模制导过程中,针对不可测目标机动信息,与本文所提算法式(8)类似采用自适应控制策略,且相关参数与本文所提算法选取一致,对比试验仿真结果如图8和图9所示。

图8 3种方法拦截轨迹图
图8刻画了在3种制导方案下导弹拦截目标的轨迹图,可看出实施3种不同策略均可以使导弹逐渐靠近目标,并且本文所提学习滑模制导策略与经典积分滑模制导策略曲线相似。然而,从相对距离图(见图9)中可以看出,3种制导策略作用下的脱靶量rmiss有所不同。为了方便对比,不同制导策略下的脱靶量在表3中列出。可以看出,理想制导环境下(即目标机动实时可测)的比例导引制导策略的脱靶量最小。由于目标未知机动的非匹配形式,经典积分滑模制导策略的脱靶量较大。然而,本文结合经典积分滑模与微分对策理论提出的整合学习滑模制导策略,能够在导弹初始条件与制导策略相同参数的前提下,有效降低脱靶量,制导效果与理想制导环境下比例导引制导效果接近且在合理范围内,提升积分滑模的制导精度,表明微分对策控制部分能够有效的处理非匹配未知目标机动,大大降低了目标突防逃逸的概率。另一方面,为体现本文算法的优化特性,考虑本文所提制导策略与经典积分滑模制导策略的过载能耗,选择如下能耗指标[33]:

表3 3种制导策略脱靶量

(50)
计算结果表明本文所题算法的过载能耗约为23.3,而经典积分滑模的过载能耗约为42.9,显然微分对策最优控制部分的引入优化了过载能耗,节省了约45%的耗能。因此,通过对比试验可以得出,与其他两种制导方法相比,本文所题算法不仅可以有效的处理非仿射制导系统,而且具有较好的制导性能,进一步体现了所提算法的优越性。
4 结束语
本文针对非仿射制导模型提出了一类学习滑模制导方法,利用控制补偿技术,将系统转化为增广仿射形式;设计自适应滑模控制部分,使得系统鲁棒匹配扰动部分的同时,沿着预设积分滑模面进入滑动模态运动;针对带有非匹配扰动部分的等效滑动模态系统,设计微分对策最优控制策略,利用评价网络学习近似哈密顿方程的解析解,给出权值更新律在线学习最优控制策略;仿真结果表明,所提出的学习滑模策略,能够使得目标被成功拦截,验证了所提制导策略的有效性。实际制导过程中,受物理因素限制,执行器存在承受上限,并且有限时间制导策略能够提升作战效率,如何处理饱和问题以及实现目标的有限时间拦截,将在后续的研究中进一步讨论。
猜你喜欢
数学物理学报(2021年2期)2021-06-09 08:54:26
数学物理学报(2019年5期)2019-11-29 07:46:34
中国惯性技术学报(2019年6期)2019-03-04 09:50:06
测控技术(2018年4期)2018-11-25 09:47:26
测控技术(2018年3期)2018-11-25 09:45:40
北京航空航天大学学报(2016年9期)2016-11-16 02:02:36
北京航空航天大学学报(2016年7期)2016-11-16 01:51:00
广东技术师范大学学报(2016年5期)2016-08-22 09:07:22
北京航空航天大学学报(2016年4期)2016-02-27 06:32:09
哈尔滨师范大学自然科学学报(2015年1期)2015-04-19 06:55:30
