
航空遥感系统全极化微波散射计系统设计与校飞试验
2023-10-29 14:19刘淑一高卓妍张祥坤董晓龙刘和光
系统工程与电子技术 2023年11期
刘淑一, 贾 岩, 高卓妍, 张祥坤,*, 董晓龙, 刘和光
(1. 中国科学院国家空间科学中心中国科学院微波遥感技术重点实验室, 北京 100190;2. 中国科学院大学电子电气与通信工程学院, 北京 100049)
0 引 言
航空遥感系统是我国首个综合性国家航空遥感系统,以国产中型飞机新舟60作为飞行平台,集成红外、可见光、微波等10个高性能遥感载荷,可用于陆地、海洋、大气等多源遥感信息获取。相比于航天遥感,航空遥感系统具有分辨率高、连续观测及快速机动等优点,可广泛应用于农林、水利、海洋等领域,在山体滑坡、洪涝、地震等灾害预警及灾后救援中发挥重要作用。
全极化微波散射计作为航空遥感系统主要载荷之一,其定位是以海洋和大气测量为主,兼顾陆地观测要求的成像微波散射计[1],监测对象包括海面风场、海洋波浪谱[2]、陆地植被和作物生长情况[3]、降雪与海冰分布情况等[4]。相比于传统单极化、双极化散射计,全极化微波散射计不仅测量回波同极化分量[5], 并且测量回波同极化分量与交叉极化分量之间相关系系数[6],使回波频率、幅相及极化信息得到全部利用,提高散射计高风速下测量精度,避免风场反演时产生风向模糊[7]。为了兼顾不同环境下测量需求,全极化微波散射计配有散射计和微波成像两种工作模式,在雨雪等可见度低的复杂观测场景下[8],成像工作模式高分辨率目标探测特性与散射计高精度后向散射系数测量特性的结合[9],有助于快速锁定待测区域,同时获取目标后向目标后向散射、空间分布与极化等多维度信息,提高后向散射系数测量及地球物理参数反演精度。
2004年美国航天局(National Aeronautics and Space Administration,NASA)戈达德太空飞中心研制出用于土壤湿度及海洋盐度测量的L波段机载成像散射计,并在IEEE(Institute of Electrical and Electronics Engineers)地球科学与遥感大会(International Geoscience and Remote Sensing Symposium,IGARSS)会议中提出成像散射计这一概念[10]。2006年至2007年,戈达德太空飞中心通过校飞试验分别验证成像散射计成像及后向散射测量功能[11-12]。2010年澳大利亚墨尔本大学联合多家研究机构研发增加干涉合成孔径雷达(interferometric synthetic aperture radar, InSAR)工作模式的L波段极化成像散射计,并成功应用于植被覆盖率、土壤湿度等环境变量监测中[13]。2019年,加拿大曼尼托巴大学研制具有散射计和高度计两种工作模式的陆基双波段极化雷达[14],并将其应用至海冰研究中。20世纪90年代,国内开始进行多模态微波遥感设备研制,2002年,我国第一个多模态微波遥感器搭载神舟四号飞入太空。散射计作为多模态微波遥感器的主要模态之一[15],在轨期间,积累大量有效的主动式微波遥感数据及经验,为多模态微波遥感仪器的发展奠定坚实基础[16]。2010年至今,国家空间科学中心致力于研制合成孔径技术与散射计相结合的Ku波段全极化成像散射计系统,将多维信息获取的概念应用于散射计系统设计中[17]。
本文首先对全极化微波散射计的系统设计方案进行详细介绍。其次,基于匹配滤波的数字中频信号处理方法,推导用于衡量全极化微波散射计后向散射系数测量精度的归一化标准差。最后,针对数字滤波器性能和数据段重叠率对后向散射系数测量精度影响进行理论分析。为验证全极化微波散射计两种工作模式可行性,2019年6月在山东省东营市及陕西省西安市分别进行海洋及陆地校飞试验。基于校飞试验结果,分析了散射计模式下的后向散射系数测量精度及成像模式下的图像分辨率。
1 全极化微波散射计系统设计
1.1 系统组成
全极化微波散射计按在机载平台安装部位可分为两部分:位于机腹天线罩内的散射计头部及位于机舱内的控制计算机及配电单元;散射计头部由天线单元、微波前端单元、发射机单元、接收机单元、频率综合器单元、数据处理与通信单元、电源单元及伺服平台等组成,三维结构图如图1所示,系统框图如图2所示,主要性能指标如表1所示。控制计算机及配电单元是全极化微波散射计的控制核心,负责系统运行控制、状态监测、数据接收及存储。机舱内的控制计算机及配电单元收到来自机上作业管理系统的控制指令后,对指令进行解析并通过平台气密接口将指令信息传递给机腹天线罩内的数据处理与通信单元,全极化微波散射计开始工作。系统发射信号采用周期线性调频脉冲,水平极化与垂直极化信号通过极化选择开关及两个不同极化的波导开口阵列天线交替发射。水平极化和垂直极化接收单元同时接收来自接收天线回波信号,获得观测目标的全极化散射信息。其中,伺服平台用于控制天线旋转及旋转角度测量,通过数字控制方式提供高精度俯仰角与方位角控制信号,利用光纤滑环代替高频滑环,解决微波及中频信号在通过散射计头部的滑环时各旋转方向插损不同的问题;微波前端单元用于发射机水平垂直极化信号切换、发射接收隔离及测量内定标模式切换;频率综合单元为系统提供高稳定度时钟和低相位噪声的本振信号;数据处理与控制单元主要由数据采集模块、数据通信模块、高速数传模块以及数字信号处理模块等组成,用于数据通讯、微波前端控制、时序控制、回波信号的采样、实时处理及参数估计等工作。

表1 全极化微波散射计系统主要技术指标

图2 全极化微波散射计系统框图
为得到高分辨微波图像,成像散射计系统需采用比传统散射计大的工作带宽,而大带宽则会使散射计的回波信号信噪比下降,降低后向散射系数的测量精度。为兼顾高精度后向散射系数测量和高分辨率微波成像特性,全极化微波散射计根据两种工作模式的需求设计4 MHz、40 MHz、120 MHz、200 MHz四种带宽,当系统工作在小带宽模式时,可以获得较高的后向散射系数精度,当系统工作在大带宽模式时可以获得较高的成像分辨率。
1.2 系统定标
作为一种主动式高精度后向散射系数测量设备,散射计必须进行定标[18-20]。为减小通道间增益不平衡、串扰的影响[21],获得目标真实散射矩阵,全极化微波散射计采用极化定标与辐射定标相结合的系统定标方案:先在地面利用三面角反射器对后向散射系数进行绝对定标,确定散射计系统同极化增益的准确值,再根据标定过的同极化增益旋转极化散射矩阵已知的二面角反射器,确定交叉极化时整个信道的增益。在飞行过程中利用内定标环路进行相对定标,对系统中抖动、温漂等因素造成的增益波动实时校准。
在机上测量的间歇,全极化微波散射计可切换到内定标模式,内定标模式采用基于脉冲体制的交替定标法。测量发射-接收通道增益的模式为内定标1模式,此时发射信号经校准网络被直接耦合到两路接收机,通过数字单元分析其功率谱,监测和补偿发射和接收通道的增益波动。由于系统发射单元和接收单元机上作业时保持常开机状态,发射信号会通过耦合及组件表面传导等方式泄露至接收机单元,对内定标信号产生较强电磁干扰。因此,内定标1模式采用光纤延时定标方法,在校准网络中引入光纤延迟线在时序上将内定标信号与发射、接收及泄露信号在时序上分离,避免内定标信号受到干扰,从而保证内定标1模式的测量精度,降低对系统收发隔离度要求。测量带内平坦度曲线的模式称为内定标模式2。此时发射机不工作,采样接收支路的热噪声并计算热噪声电平,调整自动增益控制(automatic gain control, AGC)值,使接收机输入电平保持不变。为保证后向散射系数测量精度,散射计及成像工作模式下功率测量结果必须用内定标模式2的结果修正。
2 全极化微波散射计系统精度分析
2.1 观测几何
散射计工作模式下,全极化微波散射计采用扇形波束旋转扫描方式,如图3所示,天线单元在伺服机构控制下,实现天线的旋转和天线旋转角度的测量。扇形波束旋转扫描结合了固定扇形波束和笔形波束旋转扫描的特点,可实现多角度、宽刈幅观测,在陆地及海洋地球物理参数反演中具有很好适用性[22]。
成像模式下,全极化微波散射计以扇形波束条带观测模式工作,天线以固定波束指向照射到目标表面,如图4所示,通过飞机平台与目标间的相对运动合成一个较大的等效孔径[23],在距离向和方位向利用大工作带宽和合成孔径技术获得高分辨微波图像,其观测几何与合成孔径雷达相同,根据雷达分辩理论及合成孔径原理可得距离向与方位向分辨率为

图4 成像工作模式观测几何
(1)
式中:c表示光速;B为系统工作带宽;D为天线方位向的物理孔径尺寸。
2.2 后向散射系数测量精度推导
相对标准偏差是衡量散射计后向散射系数测量精度的一个常用指标,定义为后向散射系数的归一化标准差,由于后向散射系数可根据回波信号功率用雷达方程计算得到,故可用Kp可表示为
(2)
式中:Pr为散射计回波信号功率;var[Pr]为Pr的方差;ε[Pr]为Pr的均值。Kp的值越小,对后向散射系数估计越准确。在散射计系统设计中,为获得高后向散射系数测量精度需最小化Kp。
全极化微波散射计采用基于匹配滤波的数字中频信号处理方法估计回波信号能量并计算待测目标后向散射系数[24]。相比基带接收处理,中频数字化接收可有效解决I/Q通道幅相不平衡问题,保证通道间相位正交性,降低对前端滤波器矩形系数等性能要求。信号和噪声功率同时测量避免额外时序电路,可简化系统设计,提高数据处理与通信单元工作效率。图5为全极化微波散射计信号处理模块,其中带通滤波后包含回波信号通道为信号通道,带通滤波后只包含噪声的通道为噪声通道。

图5 全极化微波散射计数字信号处理模块
设信号通道回波包含脉冲数为Np1,数字化处理后每个脉冲被划分为K1个有重叠的数据段,每个数据段长度为M,噪声通道回波包含脉冲数为Np2,数字化处理后每个脉冲被划分为K2个有重叠的数据段, 每个数据段长度为N, 则信号通道及噪声通道输入数字信号xij(n)、yij(n)通过图5所示信号处理系统积分器输出分别为
(3)
(4)
式中:Xij(k)、Yij(k)表示数字回波xij(n)和yij(n)的傅里叶变换;W1(k)、W2(k)表示数字带通滤波器频率响应。
分别计算C1和C2均值及方差可得[25]
(5)
(6)
(7)
(8)
式中:Bs表示后向散射单元带宽;fl1和fh1分别表示信号频率的上下限;Bn表示噪声带宽,fl2和fh2分别表示噪声频率的上下限;b表示噪声功率谱密度;SNR=Pr/(Bsb)表示信噪比;Ts表示采样周期;T1表示回波开始时间;TG、TN表示信号通道及噪声通道数据段积分时间;w1(n)、w2(n)表示数字带通滤波器脉冲响应;γi1(n)表示数据窗;D1、D2表示相邻数据段间独立样本数,式(3)~式(8)中参数描述如表2所示。
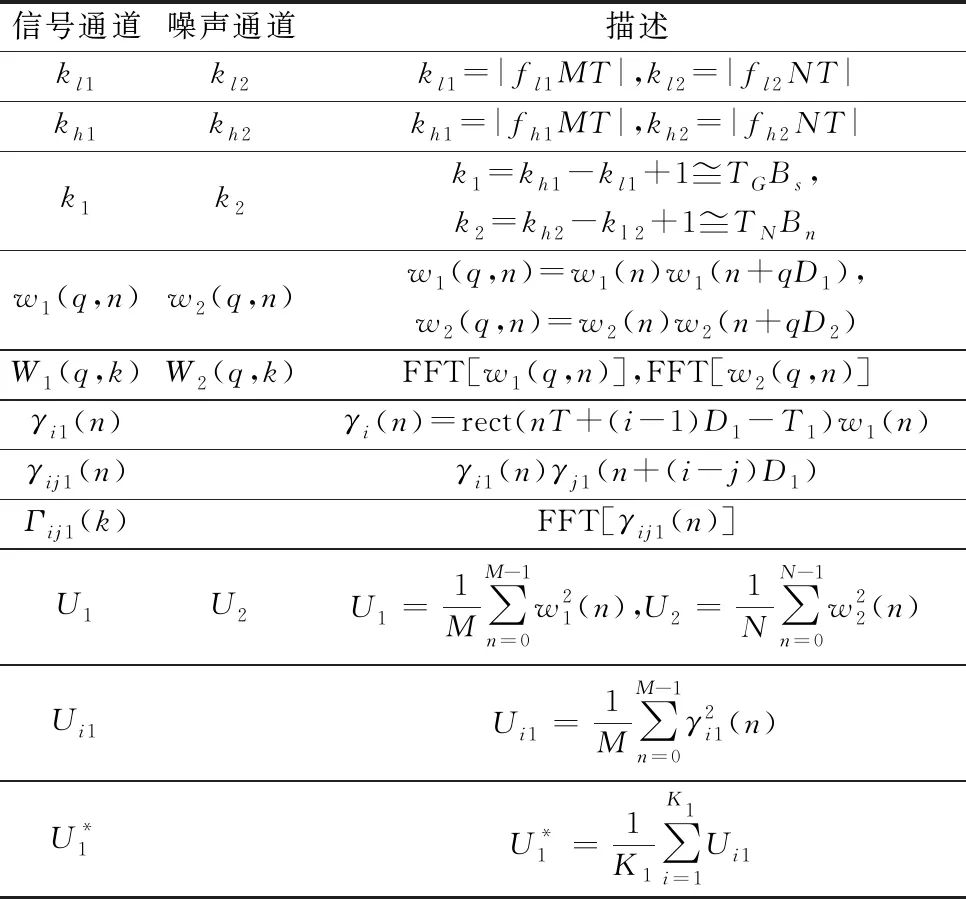
表2 式(3)~式(8)参数描述
根据式(5)~式(10)可计算Pr的无偏估计及方差为
(9)
(10)
最后代入式(2)推得后向散射系数测量精度方程为
--------------------
(11)
--------------------
2.3 后向散射系数测量精度分析
根据系统设计指标,散射计回波数字化处理后每个脉冲的数据长度L=20 000,假设M=N=2 000,B1=B2=4 MHz,D1=D2,SNR=1,可计算得k1=k2=200。图6为不同数据段重叠率下Kp与窗函数性能关系曲线。其中,为分析数字滤波器加窗效应对后向散射系数精度影响,数字带通滤波器采用升余弦窗。α为窗函数的滚降系数,α=1时为矩形窗。

图6 不同重叠率下Kp与窗函数性能关系曲线
(12)
图6中,数据段重叠率大于75%时,α对Kp影响不大且Kp整体较低,但此时数据冗余过多,极大降低系统信号处理效率;数据段重叠率为50%时,随α增加Kp逐渐下降,α>0.6时Kp趋近最小值。升余弦数字滤波器的滚降系数与频谱效率有关,增大α可降低Kp和滤波器设计难度,但α越大滤波器的频谱效率越低,所以在工程应用中α范围一般在 0.15~0.5之间。图7为k1=200,α=0.5情况下Kp随数据段重叠率变化曲线。当数据段重叠率大于60%时,Kp趋近于最小值。

图7 Kp随数据段重叠率变化曲线
在保证系统数据处理效率及可实现性前提下,为使全极化微波散射计系统性能接近最优,数据段重叠率不可过高,滚降系数须适当。综合以上关于数字滤波器性能和数据段重叠率与Kp关系分析,数据段重叠率为50%且α=0.5时,Kp接近最小值,全极化微波散射计可获得较高后向散射系数测量精度,以满足陆地、海洋观测需求。
3 飞行试验验证
为验证系统散射计及成像工作模式可行性,2019年6月19日至6月28日,全极化微波散射计在陕西省西安市及山东省东营市分别进行陆地及海洋飞行试验,陆地观测区域为西安阎良区的大荔定标场,海洋观测区域为东营黄河入海口区域。试验过程中,机载飞行平台飞行高度约3 km,速度约为350 km/h。
3.1 散射计工作模式
散射计工作模式下,全极化微波散射计系统采用旋转扇形波束扫描方式,伺服旋转速度0.26 rad/s,系统工作带宽采用4 MHz。散射计模式下海洋飞行试验回波数据如图8所示,水平极化通道回波信噪比较差,信号变化相对不明显,但根据信号峰值点可判断水平极化通道回波与垂直极化通道回波具有一致周期性。
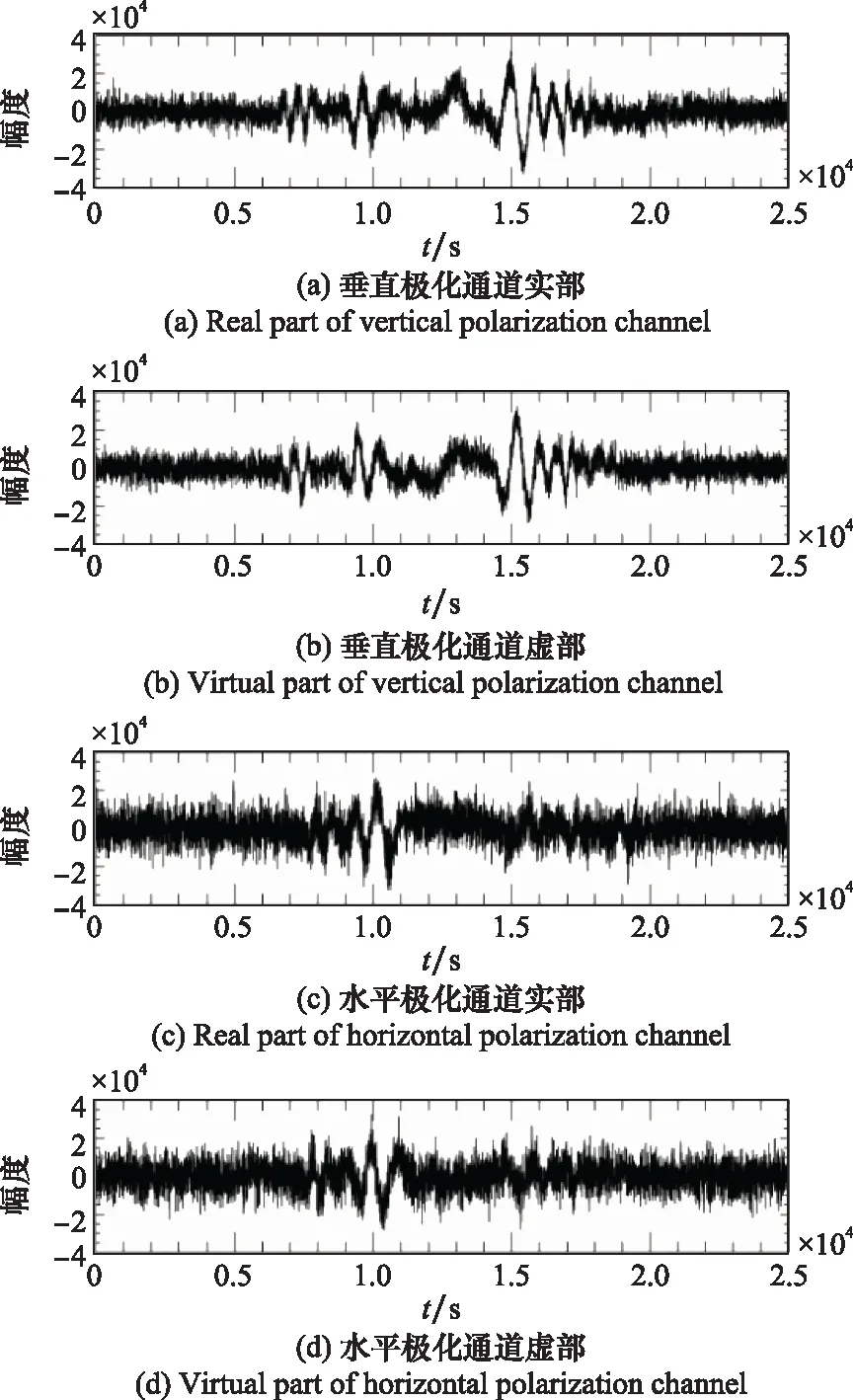
图8 海洋飞行试验回波数据
图9为数据段重叠率为50%,α=0.5情况下Kp随信噪比变化曲线。经计算,图8中垂直极化通道回波平均信噪比约为5.53 dB,水平极化通道回波信噪比约为-2.14 dB,代入式(11)可得两通道Kp分别为3.10%和6.39%。根据信噪比与Kp关系曲线,随回波信噪比增加,Kp逐渐降低,当信噪比大于5 dB时,Kp基本稳定在3.10%左右,此时全极化微波散射计系统性能趋近最优,后向散射系数测量精度受信噪比影响不大,在散射计模式下可获得较高且稳定的后向散射系数测量精度,为后续进行风场反演、海浪参数提取等工作提供有力保障。
3.2 成像工作模式
成像工作模式下,全极化微波散射计固定波束方向进行正侧视观测,其成像几何与条带合成孔径雷达一致[26],因此可以用合成孔径雷达成像算法对成像散射计进行成像处理[27]。陆地飞行试验中,成像模式系统工作带宽为200 MHz。图10为利用距离多普勒算法对大荔定标场某一区域成像的结果。

图10 成像模式试验结果(垂直极化通道)
图10中红色方框标注区域为放置在大荔定标场直角边长为0.5 m的三面角反射器,根据式(13)计算角反射后向散射截面(radar cross section, RCS)为21.2 m2,对数表示为13.26 dBsm。
(13)
式中:b为三面角反射器直角边边长(m);λ为电磁波的波长[28-30]。在可检测到角反射器数据区间内,利用雷达方程计算各脉冲对应的角反射器RCS并进行幅度统计,曲线如图11所示。经计算,RCS平均值为13.21 dBsm, 方差为0.35 dB,此时垂直极化通道Kp为4.97%。

图11 角反器RCS幅度曲线
成像工作模式下,通过合成孔径技术和大系统工作带宽获得的微波图像距离向与方位向分辨率分别为0.89 m、0.43 m,使全极化微波散射计具有良好目标探测性能,在地形测绘、目标勘探方面具有显著优势,增强全极化微波散射计在复杂环境中适用性。
4 结 论
国家重大科技基础设施航空遥感系统支持研制的全极化微波散射计是具有散射计和成像两种工作模式的新一代微波遥感设备,为海洋、陆地环境灾害预警和监测提供重要手段。首先,本文对全极化微波散射计系统设计方案进行详细介绍,系统工作时,通过极化选择开关交替发射水平和垂直极化信号,利用两个接收通道同时接收水平和垂直极化信号,获得观测目标的全极化散射信息。根据两种工作模式需求,设计4 MHz、40 MHz、120 MHz、200 MHz四种带宽,有效解决成像散射计带宽与后向散射系数测量精度之间矛盾。其次,结合系统工作特点,推导用于衡量全极化微波散射计系统的归一化标准差Kp,并针对数字滤波器加窗效应、数据段重叠率与后向散射系数测量精度关系进行理论分析。在保证系统数据处理效率及可实现性前提下,数据段重叠率为50%,滤波器滚降系数为0.5时,Kp接近最小值。最后,为验证系统两种工作模式可行性及后向散射系数测量精度,全极化微波散射计进行海洋及陆地飞行试验。试验结果表明,散射计模式下,当回波平均信噪比约为5.53 dB时,Kp可达到3.10%,此时全极化微波散射计系统性能趋近最优,可获得较高且稳定的后向散射系数测量精度。成像模式下,通过距离多普勒算法得到微波图像具有良好图像分辨性。全极化微波散射计实现了高精度后向散射系数测量和高分辨率微波成像特性的有机结合,在复杂环境观测及多维信息获取中具有良好应用前景。
猜你喜欢
物理学报(2022年22期)2022-12-05
现代财经-天津财经大学学报(2022年5期)2022-06-01
今日农业(2021年19期)2022-01-12
空间科学学报(2020年1期)2021-01-14
海洋技术学报(2020年3期)2020-08-19
电子测试(2017年15期)2017-12-18
成都信息工程大学学报(2017年6期)2017-03-16
中国光学(2015年5期)2015-12-09
电源技术(2015年1期)2015-08-22
延安大学学报(自然科学版)(2014年4期)2014-03-13
