舰载基础能力训练动感模拟器设计与实现
2023-10-29 01:31周晓光刘剑超俞艺涵
计算机仿真 2023年9期
周晓光,刘剑超,俞艺涵,穆 阳
(海军航空大学教练机模拟训练中心,辽宁 葫芦岛 125001)
1 前言
舰载机着舰一般采取恒定仰角,定常下滑的着舰方式,着舰反区操纵的要点是“看灯、对中、保角”。“保角”,是舰载机着舰的术语。舰载机进近阶段,舰载机进入反区操控区域,舰载机飞行员通过驾驶杆保持飞机仰角,通过油门控制飞机下降仰角和下滑梯度,以实现舰载机下滑道精确控制,控制难度极大。飞行模拟器具有保障安全、节约经费、提高效益等特点,是舰载机飞行员培养的重要手段,在舰载机飞行员培养中占据着十分重要的地位。文献[1]对某型舰载机FCLP模拟训练系统进行了设计;文献[2]对舰载机飞行训练模拟器视景系统进行了探论。诸多文献对舰载机飞行模拟器进行了设计研究[3,4],然而在设计过程中没有突出舰载模拟训练特点。本文针对某型教练机飞行模拟训练现实需求,结合反区操纵“看灯、对中、保角”的特殊要求,设计实现了该型教练机舰载基础能力训练动感模拟器,创造性地将小型六自由度运动平台运用与该型教练机模拟训练之中,大大地提升了该型教练机飞行模拟器的逼真度。
2 总体设计
2.1 组成结构
某型教练机舰载基础能力训练动感模拟器采用虚拟现实与实物座舱相结合、分布式仿真的技术方案,实现对该型教练机的功能的仿真,为飞行员提供训练环境。系统主要由结构分系统、座舱仿真分系统、小型六自由度运动平台、飞行性能仿真分系统、视景仿真分系统、教员制台等13个分系统组成,系统结构如图1所示。相对于采用大型六自由度运动平台的飞行模拟器,基于小型六自由度运动平台的飞行模拟器,小型运动平台位于视景球幕内,可产生飞行员模拟训练所需动感提示,在提高仿真逼真度的同时,具有造价低、占地空间小、使用方便等特点,具有更为广泛的应用前景。
2.2 工作原理
飞行模拟过程中,由控制台分系统控制全系统的运行状态。系统通过输入设备(包括驾驶杆、油门杆、脚蹬等)实时采集飞行员的操控信号,实时解算飞机性能、大气等数学模型,并将解算的飞行状态等参数发送给视景仿真、音响仿真、仪表仿真、控制台等分系统。视景仿真分系统实时调用三维视景模型(包括地景模型和目标实体模型),生成并驱动三维场景,并在显示器上输出;音响仿真模块调用音响素材,合成音响信号并加以驱动,最终输出到音响设备;仪表仿真模块通过接收的飞行数据,实时驱动虚拟仪表更新数据。操纵人员对所看到和所听到的信息进行反馈,做出正确的操控,从而构成人在回路中的闭环仿真。系统工作原理如图2所示。
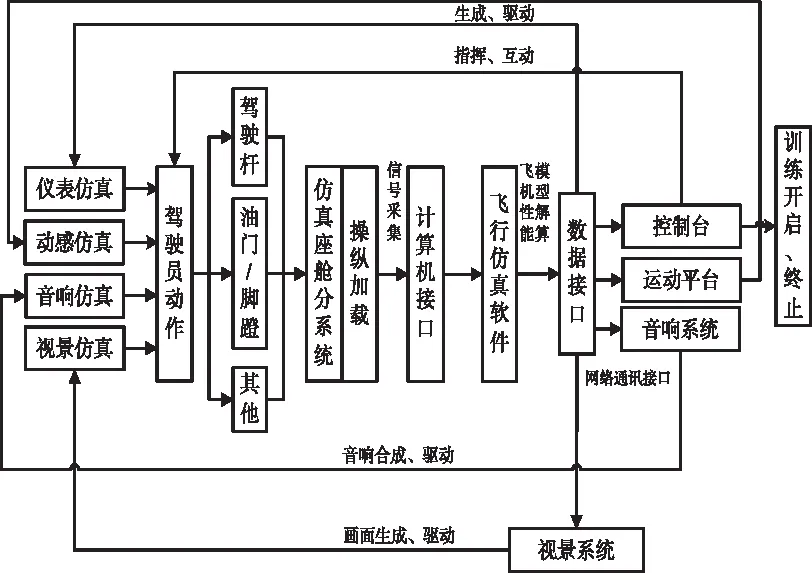
图2 系统工作原理示意图
3 运动系统
3.1 运动平台结构
小型六自由度运动平台为Stewart并联结构,主要由上动平台、下静平台、虎克铰链、电动缸和伺服电机组成,如下图3所示。伺服电机控制六条电动缸伸长量变化,以实现上动平台六自由度运动。
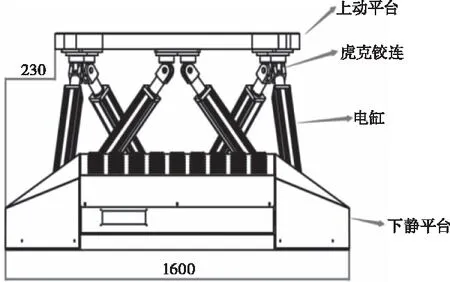
图3 小型六自由度运动平台结构
1)上动平台。上动平台为仿真座舱承载平台,其设计重点考虑三个方面内容:一是尺寸要与仿真座舱底座一致,长1.8米、宽1.37;二是结构要满足安全需求,承载1吨重物体不变形,采用优质的钢材焊接而成;三是重量要小,避免因上动平台质量过大而影响运动平台的动态性能。
2)下静平台。下静平台为小型六自由度运动平台的固定平台,根据平台整体结构设计,下静平台长2.8米、宽1.6米。下静平台主要由三部分组成:一是支架系统,提供下静平台框架,采用优质的钢材焊接而成;二是伺服控制系统,装置在下静平台后置机柜;三是电脑主机系统,装置在下静平台前置机柜内。下静平台的固定方式采用地上打膨胀螺丝方式进行固定。
3)虎克铰连。电动缸与上下平台连接采用虎克铰链方式,适用于两轴间有较大角位移的连接,且安全可靠,维护方便。
4)电动缸
电动缸如图4所示,电动缸类型为折返式,丝杠导程420mm,额定出力2.5kN,额定速度250mm/sec,额定转矩2.39Nm,额定转速3000rpm,限位开关2个,安装方式前后铰链座。
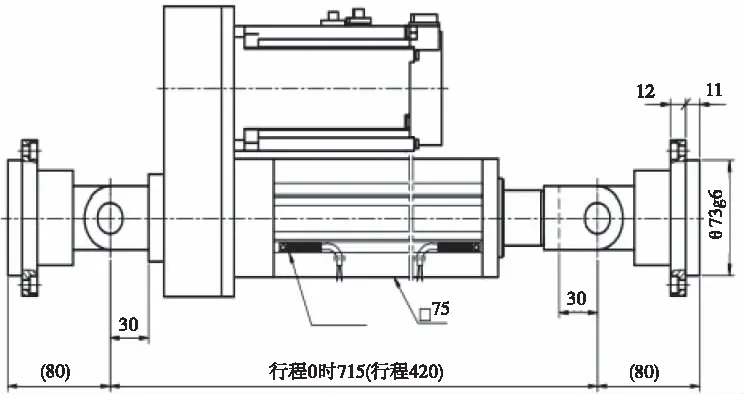
图4 电动缸整体图
5)伺服电机及驱动器
司服电机型号选取三菱;型号:HJ-KS73BJ,司服电机额定转矩3.5N.M;额定转速3000rpm;额定电流4.5A。
3.2 平台结构参数
平台结构参数如图5所示。其中,上平台直径为1032.5mm;电缸最长距离为1115mm;电缸最短距离715mm;下平台直径为1224.1mm;上平台支点间最小圆心角为11.12°,下平台支点间最小圆心角11.25°,上平台支点间最短距离为100mm,下平台支点间最短距离为120mm。
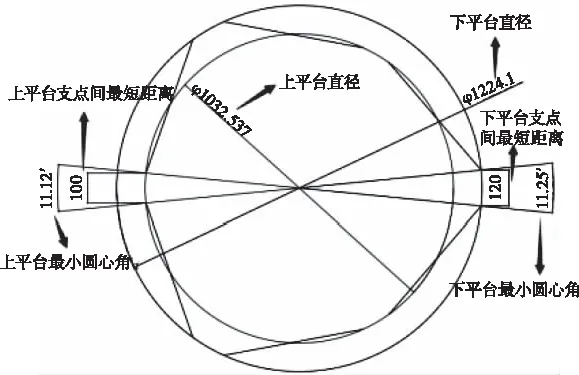
图5 平台参数示意图
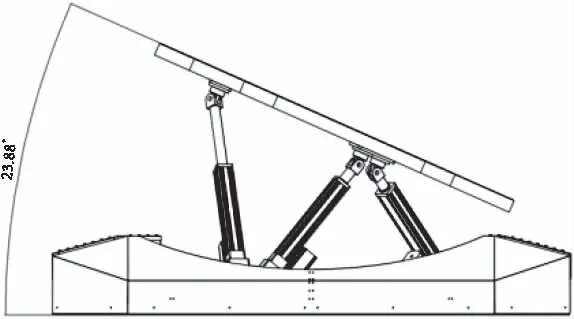
图6 平台俯仰角度仿真图
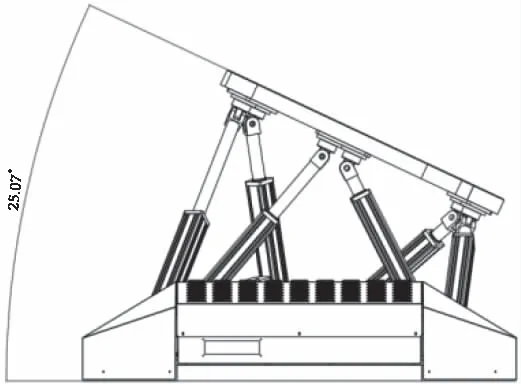
图7 平台翻滚角度仿真图
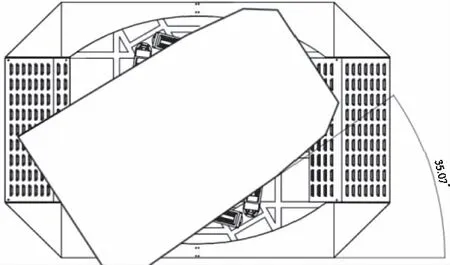
图8 平台偏航角度仿真图
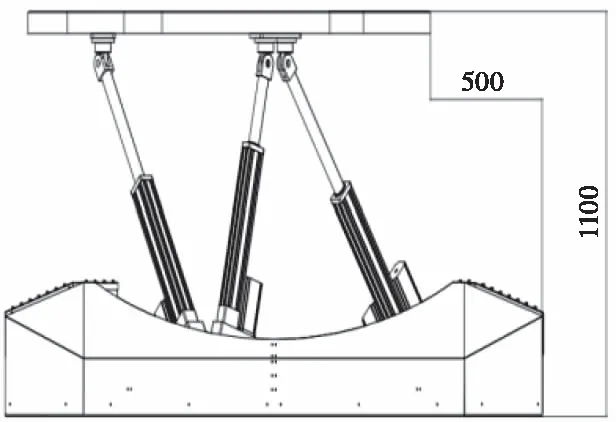
图10 平台纵荡仿真图
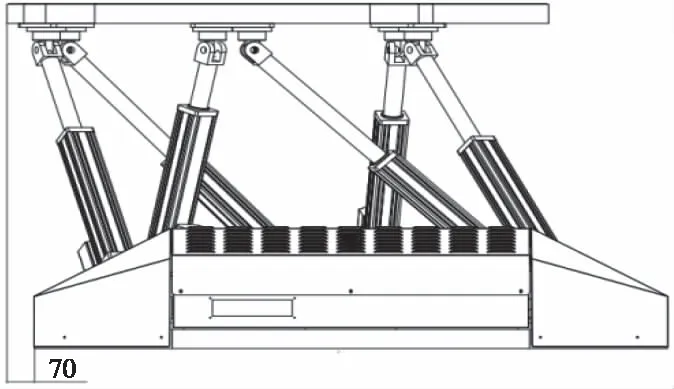
图11 平台横荡仿真图
3.3 平台运动空间
1)俯仰角度为23.22°和23.88°,大于要求±20°。(2)翻滚角度为±25.07°,大于要求±20°。偏航角度为±35.07°,大于要求±25°。
2)垂直位移为419mm,大于要求400mm。纵向向位移为±270mm,大于要求±200mm。横向位移为±300mm,大于要求±200mm,符合设计要求。
4 洗出算法
由于Stewart平台电动缸伸长量有限,因此上动平台运动范围有限,不能完全再现真实飞机的运动轨迹[5]。必须采取特殊的算法,在确保产生模拟飞行所需的动感提示的条件下,又要保证运动平台运行在安全范围内,这种算法称为洗出算法。洗出算法是Stewart运动平台的重要组成部分,设计好坏直接影响飞行模拟器性能和逼真度。
4.1 经典洗出算法
经典洗出算法的原理图如图12所示,主要由高频加速度滤波HPT、低通加速度滤波LP和高通角加速滤波HPR组成。两个高通滤波分别实现对位移加速度和角速度的滤波。低通加速度滤波LP实现了一个倾斜协调通道,通过角度实现低频加速度模拟[6,7]。经典洗出算法的主要优点是计算简单,执行速度快,参数少,设计过程简单。
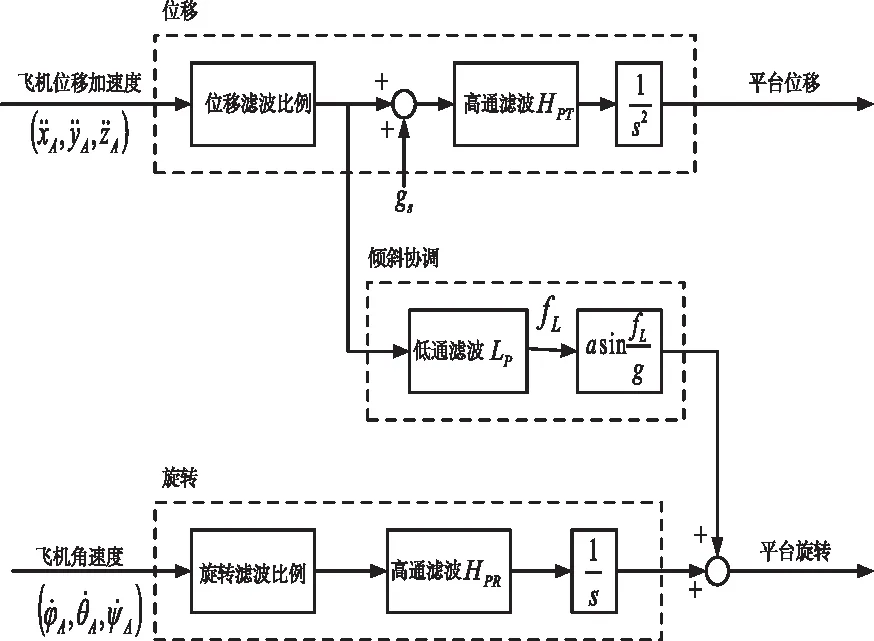
图12 经典洗出算法原理
4.2 经典洗出算法设计
洗出算法中传递函数主要包括四个:比例环节K、高通加速度滤波HPT、低通加速度滤波LP和高通角加速滤波HPR,其中比例环节K取值一般设定为1。三个滤波器传递函数如表1所示。
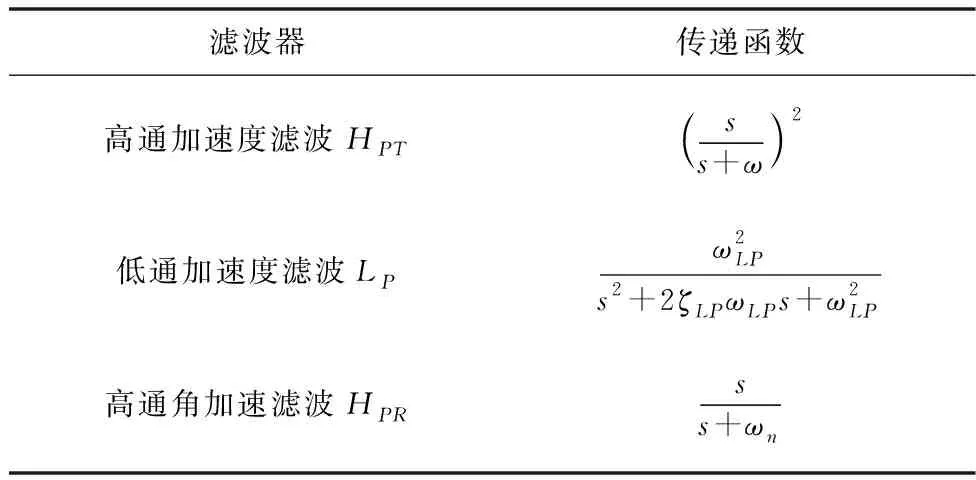
表1 滤波器传递函数
其中,s为拉普拉斯复变量;ωn为高通滤波截止频率;ωLP为低通滤波截止频率;ζLP为低通滤波阻尼比。对于中小型飞机,关键参数设置的参考值为滤波比例=1.0;ωn=2.5rad/s,ωLP=5.0rad/s和ζLP=1[8-10]。相关参数根据飞行员试飞主观感受需要进一步调整。
5 仿真分析
5.1 仿真样机
研制的某型初教机舰载基础能力训练动感模拟器样机如图13所示,系统主要由仿真座舱、小型六自由度运动平台、视景系统、教员控制台、网络接口系统等组成。全仿真座舱位于环形柱幕内,确保飞行员视点位置在球心。仿真座舱下置小型六自由度运动平台,运动平台通过地上打膨胀螺丝方式进行固定。

图13 动感飞行模拟器样机
5.2 仿真结果分析
根据飞行员体验效果,经多次试飞体验,逐一对参数进行优化调整,最终确定相关参数。动感模拟器位移加速度滤波情况如图14所示,角速度滤波情况如图15所示。经滤波后,驱动杆长度在安全范围内,并提供飞行员感受到加速度和角速度与实际飞机相似的感知,大大提高了飞行模拟器逼真度。
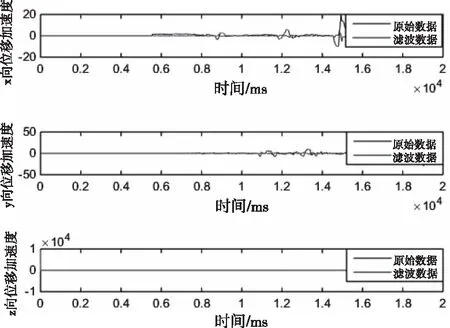
图14 位移加速度滤波情况
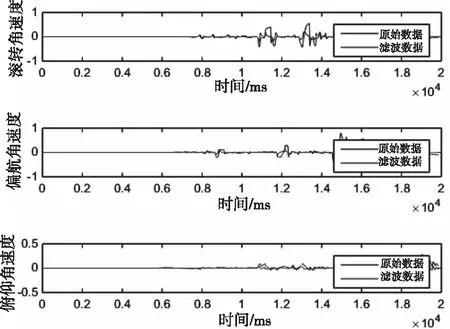
图15 角速度滤波情况
由于模拟器结构设计上视景显示系统未安装在运动平台之上,此结构存在因运动平台运动而导致与视景系统错配问题。解决方法主要有两种:一是对视景系统进行补偿,消减运动平台运动而导致的角不一致问题;二是合理设置运动平台洗出算法参数,减少小角度度模拟中运动平台的运动,减弱小角度度模拟中运动平台运动对视景运动的影响。经反复实验,第一种方法因视景运动和平台运动同步问题难以解决,进一步补偿容易引发眩晕。
第二种方法简单,滤波算法耗时小,容易实现,且飞行员反馈逼真度更好,因此采用第二种方法。
遴选有丰富经验的多名飞行员,先角度后位移,先单通道后多通道的顺序,反复试飞,最终确定滤波算法的关键参数值。
6 结论
针对某型初教机舰载基础能力模拟训练需要,设计了基于小型六自由度运动平台的动感飞行模拟器。该型模拟器具有占地空间小,造价低,仿真逼真度高等特点,极具推广价值。基于经典洗出算法,实现了该型模拟器的运动控制。仿真结果显示,该型模拟器可以有效提供飞机的动感提示,大大提升了仿真逼真度。后续将进一步研究动感模拟器洗出算法优化问题。
猜你喜欢
中国自行车(2018年12期)2019-01-29
电子测试(2018年4期)2018-05-09
中学科技(2018年2期)2018-03-15
中学科技(2016年12期)2017-01-07
中学科技(2016年11期)2017-01-07
舰船科学技术(2015年8期)2015-02-27
振动、测试与诊断(2014年4期)2014-03-01
空间控制技术与应用(2009年2期)2009-12-20