基于神经网络的飞机供水系统故障预测研究
2023-10-29 01:31陈思远李超群
计算机仿真 2023年9期
吴 梅,陈思远,李超群
(1. 西北工业大学自动化学院,陕西 西安 710072;2. 航空工业航宇救生装备有限公司,湖北 襄阳 441000)
1 引言[1-8]
预测与健康管理技术(Prognosis and Health Management,PHM)是指利用传感器提取系统信息,借助信号处理技术来评估系统的健康状态,并对故障进行诊断、预测,为系统的运行、维护、保障等提出建议。对系统进行健康管理必须建立在状态数据采集、信息融合和特征提取的基础上,并以故障诊断、预测和修复为主要手段。
目前PHM技术已广泛应用于英、美、加拿大和以色列等国大、中型民用和军用飞机领域,包括航空发动机健康管理、飞行控制系统作动器的故障诊断和寿命预测、飞行器推力系统、供油系统和供电系统的健康管理、航空器的结构健康监测、轴承的寿命预测、航空电子系统的故障诊断和预测等。
国内在PHM技术研究方面起步较晚,主要研究工作在理论方面,例如北京航空航天大学可靠性工程研究所、航空634所、西北工业大学、哈尔滨工业大学、空军工程大学等研究机构从设备健康衰退规律、故障预测模型、健康管理技术等方面对国外PHM技术进行了跟踪研究,而应用方面的工作主要体现在民航飞机或发动机的性能状态监控的软件系统上,在飞机机载水/废水系统健康管理方面尚没有相关文献报道。
故障预测方法分为基于失效物理模型、基于数据驱动和基于可靠性理论三类,其中基于可靠性理论的预测方法具有广泛的应用性,但只能用于描述某一类产品的总体情况;基于失效物理模型的预测方法需要深入研究对象的物理特性和故障机理,其预测难度和成本最高;而基于数据驱动的预测方法不需要精确的物理或数学模型,开发费用、算法运行要求相对较低,是目前研究应用的热点,其中的神经网络方法更是当前使用最普遍的数据驱动方法。
因此,本文针对国产某型飞机水/废水系统健康管理课题开展神经网络故障预测算法研究。根据水/废水系统当前使用状况和历史数据,通过对其重要特征参数的统计分析得到系统健康度曲线(或可靠度曲线、浴盆曲线),据此预测系统或部件的剩余寿命以及未来某时刻的工作状态,以采取视情维修和适时维修。
2 数据来源及特征提取
2.1 空气压缩机仿真数据
飞机水/废水系统在飞行过程中的各项运行参数、性能参数、环境参数(例如振动、压力、湿度、电流、电压、噪声等)以及地面维护时的维修数据等与系统健康特征密切相关,但是系统实际故障数据很难得到。通过查阅近几年文献资料可知[9-14],只有郑亚飞[10]提到用实际电液伺服阀来验证AMESIM故障模型的测试验证问题,但是需要在实验中将实际伺服阀拆解开进行分析;靳小波[11]通过替换真实损坏或人工处理的零件进行故障模式注入的方式,完成了故障数据的获取。因此,在进行飞机机载设备故障预测研究时,有必要应用仿真手段模拟系统故障下运行情况,以获取系统故障数据。
如图1所示,本文基于AMESim仿真软件建立飞机供水系统仿真模型,并通过故障注入方式(通过设置空气压缩机内转子转速以模拟改变压缩效率),选取空气压缩机排气口处气压数据作为压缩机效率的故障预测数据来源,由此展开如图2所示的故障预测算法及仿真研究工作。

图1 基于AMESim的供水系统仿真模型
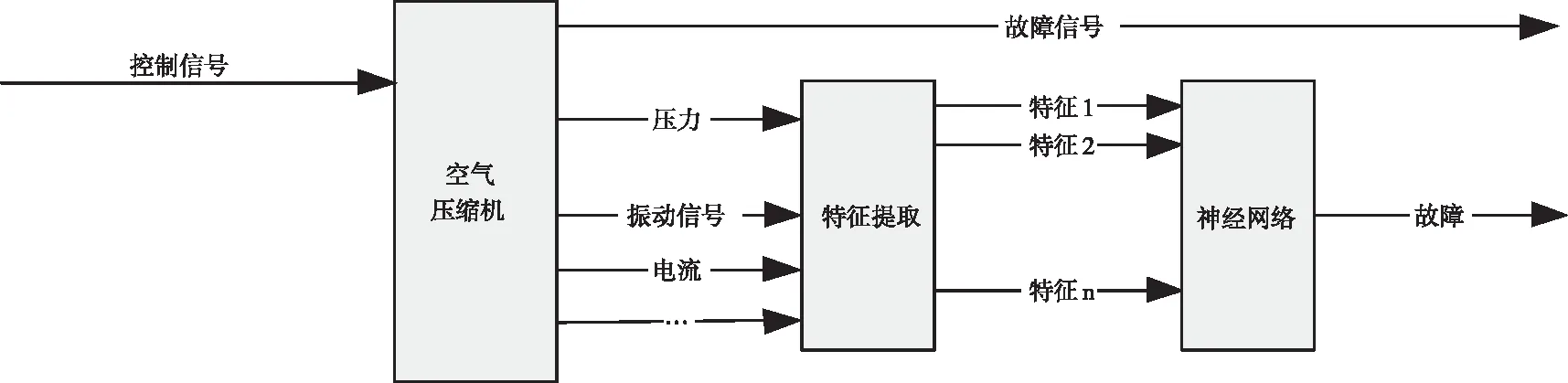
图2 空气压缩机故障预测流程
按照要求,压缩机转子标准转速应为3600±200r/s,现以3600r/s作为标准,设置不同百分比进行仿真,获取20组空气压缩机出口处压力值数据,如表1所示。

表1 供水系统空气压缩机出口处压力
2.2 基于主成分分析法的特征提取
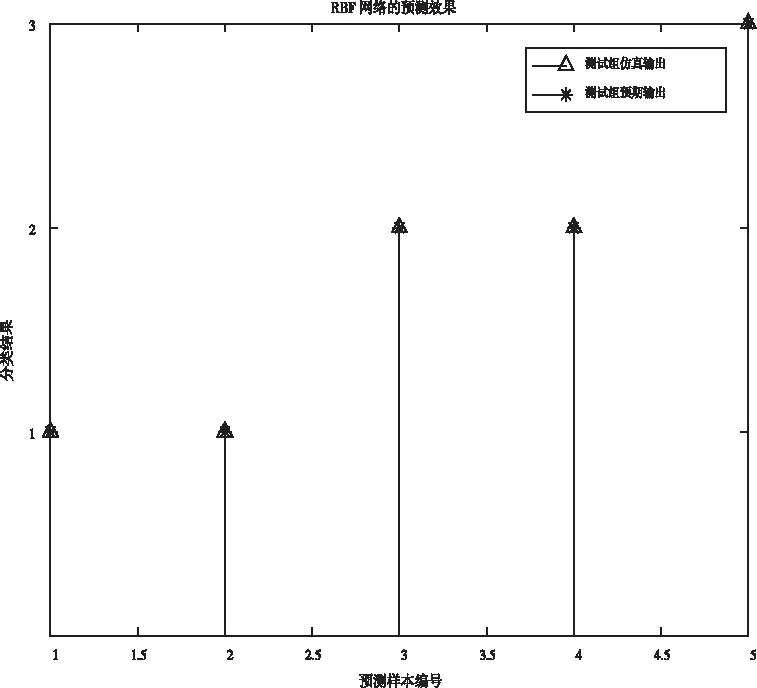
特征提取是在数据预处理基础上,进一步提取出传感器采集信号中的特征信息,以获得适当的特征征兆集,用来表征故障特征,为后续的健康预测提供数据支持。在此采用主成分分析法(Principal Components Analysis,PCA)完成特征提取,这是一种降维特征提取方法,主要通过正交变换将一组可能存在相关性的n维变量转换为一组线性不相关的k维变量(k 针对一份有m个样本、每个样本由n个特征(变量)来描述的数据集X 可按以下步骤进行降维: 1) 将数据集X中的每个样本作为列向量,按列排列构成一个n行m列的矩阵; 2) 将矩阵的每一个行向量(每个变量)都减去该行向量的均值,从而使得新行向量的均值为0,得到新的数据集矩阵Y; 4) 按照特征值从大到小的顺序,将单位特征向量作为行向量排列成矩阵,得到转换矩阵P,并按PY计算出主成分矩阵,该矩阵即是原数据集在主成分空间中的表示; 5) 用特征值计算方差贡献率和方差累计贡献率,取方差累计贡献率较高的前k个主成分,或者想降至特定的k维,直接取前k个主成分。 对于飞机供水系统故障仿真模型,需提取均值、方差、标准差、均方根、最大值、最小值、峰峰值、整流平均值、峭度、偏度、波形因子、峰值因子、脉冲因子和信息熵共14种时域特征,因此取20组时域特征数据X(20*14维)。考虑到需要保留尽可能多的信息量,在新空间中选取4维数据用于故障预测测试(k=4,20*4维,信息量保存约100%)。 故障预测是在系统处于健康态时,预测其故障发展趋势,以便事先采取合理的补救和维修措施。如图3所示,系统或元部件从健康状态到性能下降态、再到完全故障态是一个过程,当目前监测点在 A 点(正常态)或 B 点(早期故障态)时,故障预测就是估计系统状态何时会演化到 C 点(故障态)或 D 点(失效态),其中早期故障态是工作效率降低的过程,可细分出多个性能衰退程度,如表1所示。具体来说,本文故障预测方法就是将图中A点到D点的曲线纵坐标数据(此为由传感器测得并已经过数据预处理、特征提取的系统仿真数据)进行基于神经网络的模式分类及拟合,从而获得如图3所示的故障趋势曲线。 图3 故障趋势曲线 径向基神经网络(Radial-Basis Function,RBF)具有结构简单、运算速度快等特点,由于其网络连接权值与输出呈线性关系,可由线性方程直接解出,从而可加快学习速度并避免局部极小问题,达到全局最优点,因此RBF网络在模式识别、函数逼近、自适应滤波与控制领域取得了广泛的应用。 RBF网络结构如图4所示,由输入层、输出层和一个隐层构成(假定各层节点数分别用n,l,m表示),其中从输入层到隐层,输入向量的各个分量被毫无改变地传送到每一个隐节点,每个隐节点函数均径向对称,各个隐节点函数可取高斯型函数: 图4 RBF网络结构图 (1) 其中x=[x1,x1,…,xn]T为输入向量,μi为隐层第i个神经元的“中心向量”,σi为隐层第i个神经元的“尺度因子”。 当x取值远离中心向量μi时,基函数zi(x)值逐渐减小;只有当x在μi附近时,zi(x)值较大,这一区域称为“接受域”,曲线的形状主要由σi确定,σi越小,接受域越小,反之,接受域越大。 网络输出y=[y1,y1,…,yl]T由下式确定 (2) 每个隐节点的中心向量和尺度因子各不相同,分别代表着不同的典型样本和其接受域,计算表明:取相同的尺度因子对网络的逼近能力影响不大,而中心向量的选择对网络的逼近能力有很大影响。只要其中心向量选择得当,只需要很少的神经元就能达到满意的逼近效果;如果中心向量选择不当,就会造成中心向量不能充分反应输入样本的分布特点,网络逼近能力变坏。 在确定中心向量时,一般采用K均值聚类算法。按输入进行均值聚类算法分为批处理方式和递推方式,其批处理方式步骤如下: 1) 第一次随机从输入样本中选择K个聚类中心:μi(1),μ2(1),…,μk(1),括号内的序号为迭代序号; 2) 逐个计算每个输入样本与K个聚类中心的距离di(i=1,2,…,k),并按最小距离原则确定其属于那一个聚类中心,例如,若 (3) 则x属于第i个聚类中心μi,上式中K为聚类中心的数目; 3) 计算各个聚类中心新的向量值: (4) 其中,Ni为第i个聚类域中所包含的样本个数; 4) 如果|μi(k+1)-μi(k)|>ε,(ε为设定误差),i=1,2,…,k,则返回步骤2),否则,聚类计算结束。 在进行批处理算法的过程中,初始中心μi(0)(i=1,2,…,k)可从输入样本中选取,也可随机选取,只要和输入样本有相同维数即可。 RBF神经网络故障预测流程如图5所示。 图5 神经网络故障预测实现流程 在采用MATLAB自带库函数实现故障预测算法仿真时,其径向基函数扩展系数SPREAD的选择很重要,该值应足够大,使径向基神经元能够对输入向量所覆盖的区间都产生响应,但也不要求大到所有的径向基神经元都如此,只要部分径向基神经元能够对输入向量所覆盖的区间产生响应就足够。SPREAD的值越大,其输出结果越光滑,但太大的SPREAD值会导致数值计算上的困难,若在涉及网络时,出现“Rank Deficient”警告,应考虑减小SPREAD的取值。 针对前述20组空气压缩机故障仿真数据,通过时域特征计算、PCA降维,将数据分为15组训练数据和5组测试数据。训练数据用于训练神经网络,并将预测信息存储在网络权值和阈值中。测试数据用于检验网络预测的正确性以及检验网络的泛化能力,即对未知数据的预测能力。针对RBF网络,可通过调整径向基函数的扩展系数SPREAD,使其故障预测正确率达100%。 图6所示为RBF网络故障预测网络训练结果,图7所示为测试结果。由图可知,5组测试数据的故障预测达到100%的正确率,可满足水/废水系统故障预测需求。 图6 RBF网络训练结果及误差图 图7 RBF网络测试组输出结果 本文针对飞机机载水/废水系统进行了故障预测算法研究及仿真验证,通过故障注入、特征提取、神经网络权值训练、故障预测等过程,快速准确地得到了系统的故障衰退曲线,所采用的主成分分析法可以有效降低原始数据维数、提取数据主要信息以提高神经网络实时训练速度。 在实际工程应用中,也已编写了相应的基于C语言实现的神经网络故障预测算法,以应用于国产某型飞机水/废水系统的健康管理体系中,通过实时更新故障数据及神经网络权值,可实现飞机水/废水系统在线故障预测,便于后期维护保养,保证系统可靠性和安全性。
3 故障预测
3.1 预测原理

3.2 基于径向基神经网络的故障预测实现






4 仿真分析

5 结束语
猜你喜欢
新高考·高一数学(2022年3期)2022-04-28
中学生数理化(高中版.高考数学)(2021年1期)2021-03-19
电子制作(2018年19期)2018-11-14
电子测试(2017年15期)2017-12-18
自动化学报(2017年11期)2017-04-04
雷达学报(2017年6期)2017-03-26
高中生学习·高三版(2016年9期)2016-05-14
新高考·高二数学(2015年11期)2015-12-23
电子设计工程(2015年6期)2015-02-27
噪声与振动控制(2015年4期)2015-01-01