
无人飞艇纵向L1自适应控制
2023-10-29 01:31:46陈纪旸霍江航马晓静
计算机仿真 2023年9期
黄 金,陈纪旸,2,霍江航,马晓静
(1. 山东大学海洋研究院,山东 青岛 266200;2. 山东正中信息技术股份有限公司,山东 济南 250014)
1 引言
随着平流层平台的提出,作为传统飞行器的飞艇再次走进人们的视野。无人飞艇是一种航天器,利用艇内密度比空气轻的气体来实现飞行。近年来,由于无人飞艇具有提供监视、通信和遥感等服务的能力,人们对其的关注程度大大提高。控制器的设计对于无人飞艇的研究非常重要,这关乎飞艇是否能够在空中实现稳定控制。控制系统中的一个经典方法是将实现跟踪或定位等任务的过程视为传递函数的调节问题。目前对于航行器一类的控制一般采取PID、模糊PID[1]、滑膜控制[2]、鲁棒控制[3]、自适应控制等方法。传统PID抗干扰能力较差,而且当被控对象参数发生变化时不能做出调节,模糊PID需要大量的调节数据经验作为知识库,滑膜控制容易在平衡点附近产生抖动,鲁棒控制只能保证系统参数在一定波动范围内的稳定,有局限性。由于无人飞艇的动力学特性与传统飞行器有很大的不同,飞艇在飞行过程中存在着大量的参数摄动和外界干扰,为了获得满意的控制器性能,必须采用鲁棒性更好的控制算法。
自适应控制主要是针对那些受外部环境及自身结构影响,模型不确定或模型参数容易发生变化的被控对象。它能够识别出被控对象模型的变化,并随着外界环境或模型变化而自动修正参数从而维持控制系统的稳定。继2006年Cao等人提出自适应控制方法以来[4,5],自适应控制控制算法受到了很大的关注,国内外许多研究学者开展了大量自适应相关的深入研究[6-8],但大多是将L1自适应控制应用在无人机[9,10]及其它航行器[11]上;关于L1自适应控制方法应用到无人飞艇控制上的研究相对较少。
因此在现有研究结果的基础上,本文讨论了无人飞艇纵向控制的问题,采用了一种L1自适应控制方法。为了设计系统,首先建立了飞艇飞行运动学的数学模型。整个飞艇纵向运动控制系统采用PID与L1控制器串级控制,分为俯仰控制回路及高度控制回路,其中俯仰控制回路采用L1自适应控制,而高度控制回路采用PID控制,并以俯仰控制回路为内环。与传统的控制方法不同,本文的方法对扰动具有很强的扰动性,特别在无法得到被控对象精确模型的情况下,该控制器可以自动辨识被控对象的参数,并实现对无人飞艇的稳定跟踪控制[12]。
本文章节安排如下:第一节是引言,第二节建立了无人飞艇的数学模型。第三节进行了L1自适应控制器的设计。第四节给出了仿真结果,并对控制器的性能进行了评估。最后一节是对全文的总结。
2 无人飞艇纵向运动建模
无人飞艇与固定翼飞机不同,飞艇体积巨大,而且动作缓慢,因此,需要考虑飞艇的一些独特特性。主要是因为飞艇没有螺旋桨叶,因此不像传统的固定翼飞机那样依靠升力,而是依靠浮力在空中停留。本文所研究的无人飞艇结构示意图如图1所示。
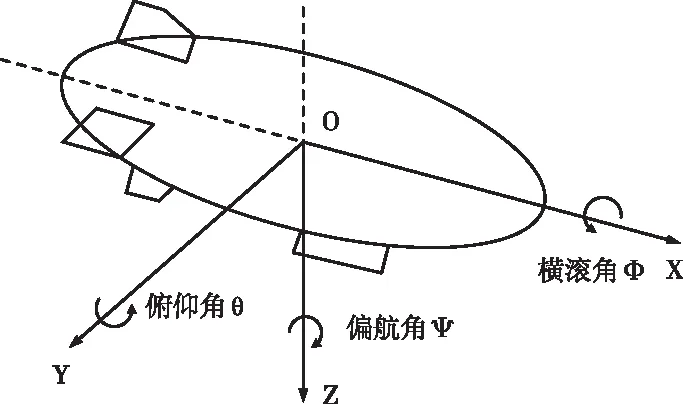
图1 无人飞艇结构示意图
在本文中,考虑到飞艇的几何体积庞大,所涉及的状态也过多,为了便于建立模型,给出了一下假设:
1)飞艇被视为刚体;
2)飞艇的纵向运动是完全可控的,飞艇在水平方向上的运动可以忽略不计;
3)作用在飞艇上的浮力等于重力,因此这两者之间力的影响可以互相抵消;
4)飞艇是个规则的椭球,即所受重力、浮力、发动机所提供的升力都经过飞艇的质心;
同时给出了如下关于大气的两个假设:
5)大气的密度、压力、温度变化缓慢;
6)纵向运动过程中无恶劣天气;
基于这些假设,飞艇的纵向运动学模型可以表述为

=q+q(cosφ-1)-rsinφ
(1)
=q+σθ1
式中,σθ1=q(cosφ-1)-rsinφ。
由于本文只考虑飞艇在纵向方向的运动,故飞艇在横向上的运动也即横滚角φ可以忽略,故俯仰角速度q直接决定俯仰角θ的大小。
无人飞艇在纵向上受力方程如下式

(2)
根据假设4),可以得到飞艇的气动力方程式如下

(3)
Iy=Q∇∇∇

(4)
在上式中令


(5)
本文就是基于上述被控对象模型来研究L1自适应控制方法的。
3 L1自适应控制器设计
本文飞艇的纵向控制系统由俯仰角控制系统、高度控制系统两部分组成,其中高度控制系统是以俯仰角控制系统为内环,再增加一个由俯仰角到高度的传递函数组成。整个纵向控制系统如图2所示,G(s)代表由俯仰角到高度的传递函数。
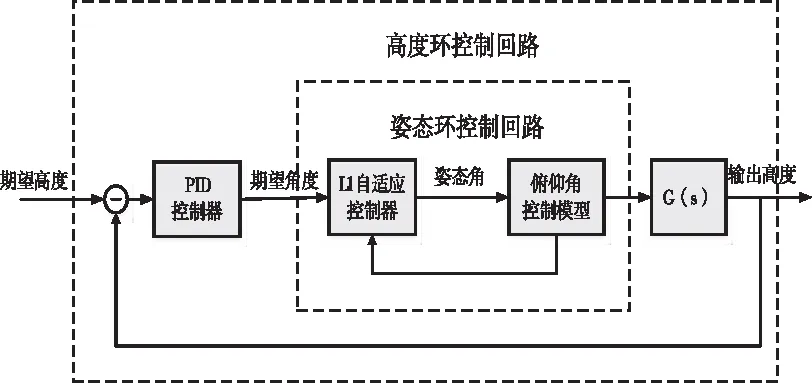
图2 无人飞艇纵向控制系统原理图
本文所提出的L1自适应控制器针对上图中的俯仰控制回路设计。L1自适应控制器原理如下图3所示,其包括4个部分,分别为被控对象、状态观测器、控制律及自适应律。下面将对这四个部分进行分别阐述。

图3 L1自适应控制原理图
3.1 被控对象
针对无人飞艇系统中不确定参数及未知扰动,可用状态空间方程形式建立如下被控对象的数学模型
(6)
其中x∈Rn是系统的状态向量(可测),u∈R是系统的控制信号,B、c是已知常向量。A是未知的n×n维的矩阵,y是系统的输出。这样就把系统的不确定性参数分部在了A、B、σ中,A表示飞艇自身结构的不确定性,B表示输入引起的不确定性,而σ代表飞艇所在环境中未知的干扰,比如自然风等。

(7)
3.2 状态观测器
由L1自适应控制相关理论可得,状态观测器是对系统被控对象的不确定数学模型进行估计,所以状态观测器应与被控对象具有相似的形式,根据式(7)可得状态观测器如下:

(8)
将式(7)和式(8)作差可得被控对象与状态观测器的输出误差为

(9)

要想实现飞艇纵向的稳定控制,需保证上式在Lyapunov下是渐进稳定的,由能量函数得
(10)

3.3 自适应律
自适应设计通过使被控对象与状态观测器的输出误差在Lyapunov意义下稳定来估计被控对象中的不确定参数的值。对式(10)求导得:

(11)
输出误差在Lyapunov意义下渐进稳定可控,即对上式负定。则分别令

(12)

(13)

(14)
可满足条件,从而得自适应律[13]如下
(15)
(16)
(17)
3.4 控制律


(18)
当时间t→∞时,sI可忽略不计,此时有

(19)
由于控制律设计的目的是误差为零,即有

(20)
从而得

(21)
由于自适应过程中会产生高频振荡,因此在控制器中加入低通滤波器D(s),滤除掉输入信号的高频扰动,同时实现自适应律与控制律的分离。在确定低通滤波器中带宽k的取值时,整个控制系统需要是渐进稳定的,则需要符合L1小增益定理的条件,即
‖M(s)‖L1‖Δ(s)‖L1<1
(22)
其中,Δ(s)代表系统前向通路的传函,M(s)代表反馈回路的传函,对于本系统

(23)
对于k,可得

(24)
对于本系统,则加入低通滤波器之后的控制律方程可表示为

(25)
4 仿真
综合上述L1控制器的设计,在Simulink上搭建飞艇纵向控制模型,然后向系统中输入阶跃和正弦波信号,分别验证俯仰角及高度控制系统各自输出的响应。考虑到环境干扰不确定因素,在系统加入干扰信号,并和传统的PID控制做对比,其中传统PID内环俯仰控制回路采用PI控制,kP=-30,kI=-0.5,外环高度控制回路采用PD控制,kP=-0.12,kD=-0.9;同时考虑到飞艇在飞行过程中模型参数可能发生变化,改变模型参数,并验证其参数辨识效果。
为了证明飞艇纵向控制系统的有效性,本文选择文献[14]中的被控对象,取
4.1 俯仰控制回路
1)无干扰时:
分别输入阶跃信号θ(t)=1及正弦波信号θ(t)=15sin(t)时,俯仰角控制系统输出如图4和图5。
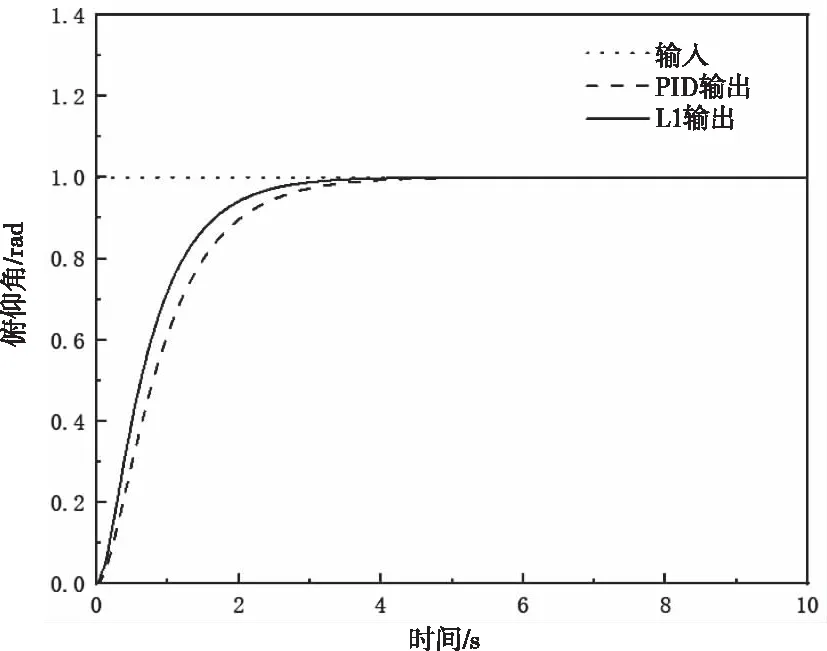
图4 输入阶跃信号θ(t)=1

图5 输入正弦波信号θ(t)=15sin(t)
2)加干扰情况下:
在两种不同输入信号下分别加入干扰D1(t)=7,7s
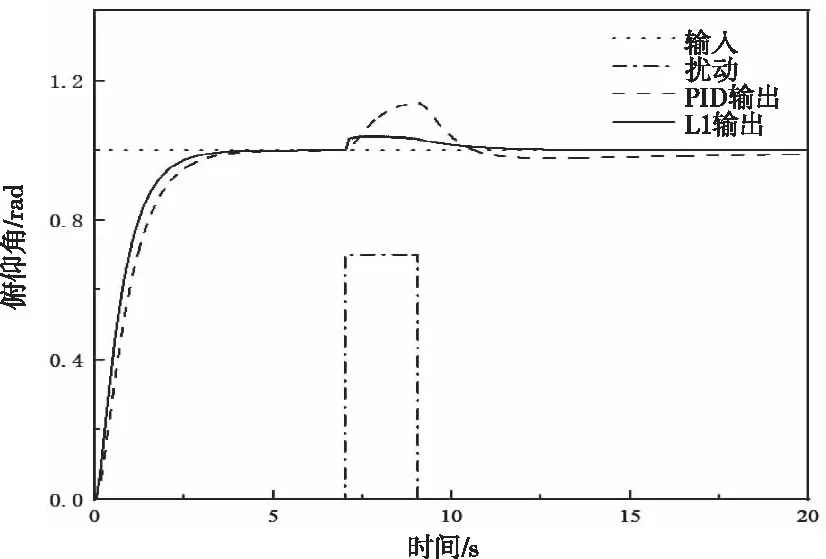
图6 输入θ(t)=1时,加干扰D1(t)
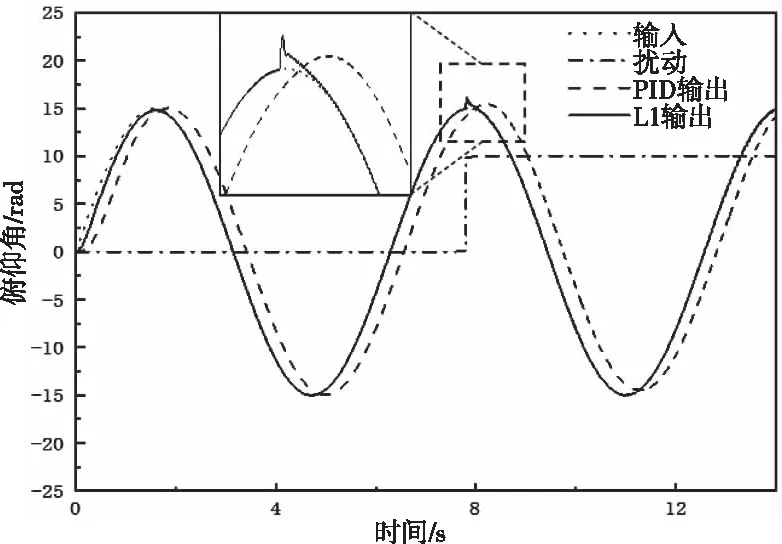
图7 输入θ(t)=15sin(t)时,加干扰D2(t)
对于俯仰角控制回路,对比图4和图6,当输入阶跃信号时,L1自适应控制与传统PID控制算法对比见表1。
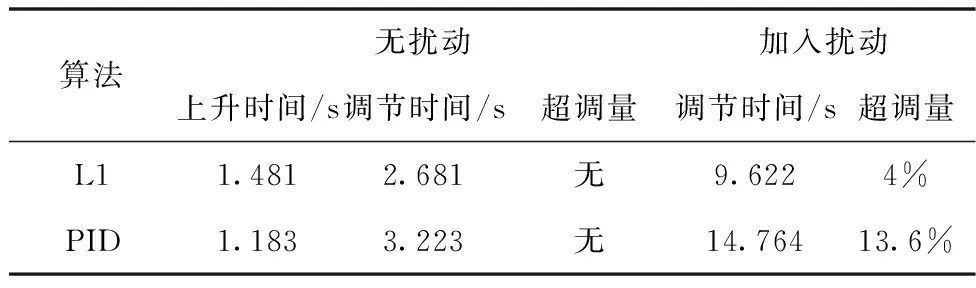
表1 俯仰控制系统L1与PID算法比较
从表1两种控制算法的对比中可以发现,在俯仰角控制系统中,无扰动时,和传统PID相比,L1有更快的上升时间及更小的调节时间;当两个算法都加入相同的干扰时,L1自适应算法超调量较小,并且能够更快地调节、抑制干扰的影响再次恢复稳定。
同时对比图5和图7可得,在正弦波输入信号下,L1自适应输出几乎与输入信号重合,而传统PID则和输入的信号有一个相位差;在加入干扰后,L1自适应表现为产生一个较小的峰值,但很快调节干扰重新跟踪输入信号,然而PID图像则整体往上发生了平移,且不能调节恢复到未加干扰前的状态。
4.2 高度控制系统
高度环控制系统以4.1节所述俯仰角控制系统作为内环,再增加一个由俯仰角输出到高度输出的传递函数G(s),高度外环采用PID调节。整个纵向控制采取PID与L1控制器串级调节,并与内外环均采用传统PID的控制方式做对比。
4.2.1 干扰影响
1)无干扰时
同俯仰控制系统类似,分别输入阶跃信号h(t)=10及正弦波信号h(t)=10sin(t)时,高度控制系统输出如下图8和图9所示:
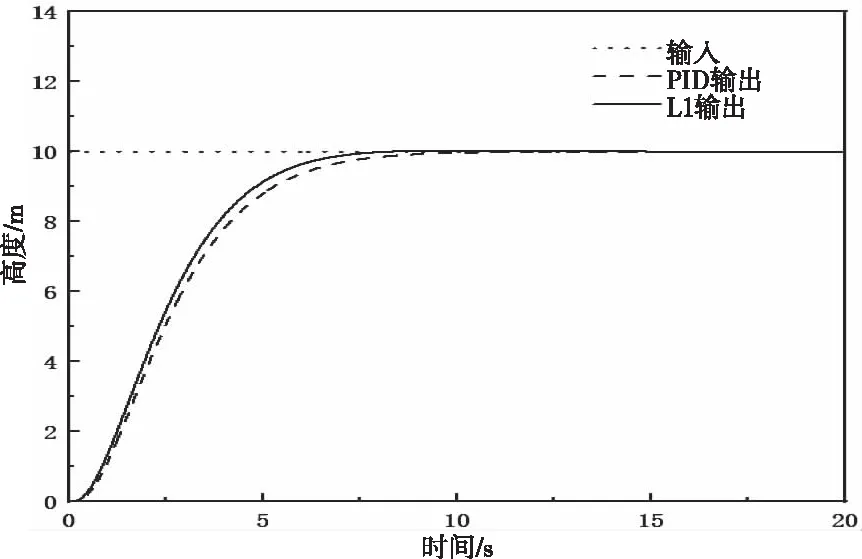
图8 输入阶跃信号h(t)=10
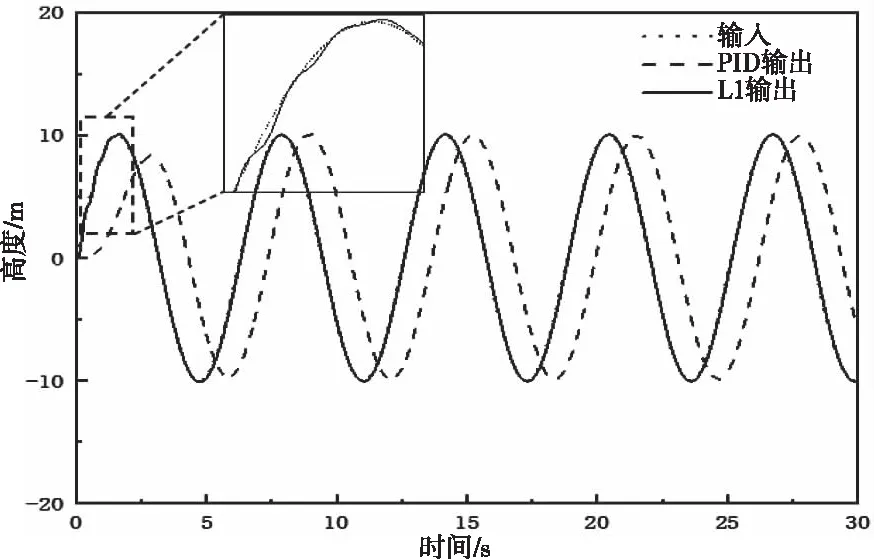
图9 输入正弦波信号h(t)=10sin(t)
2)加干扰后
两种不同输入信号下分别加入干扰D3(t)=4,15s
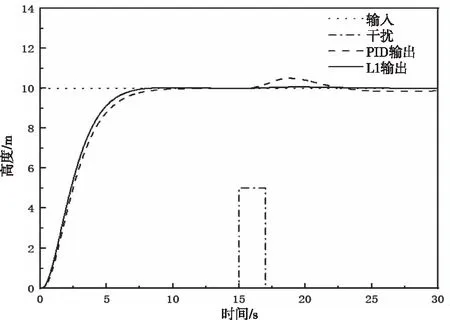
图10 输入h(t)=10时,加干扰D3(t)
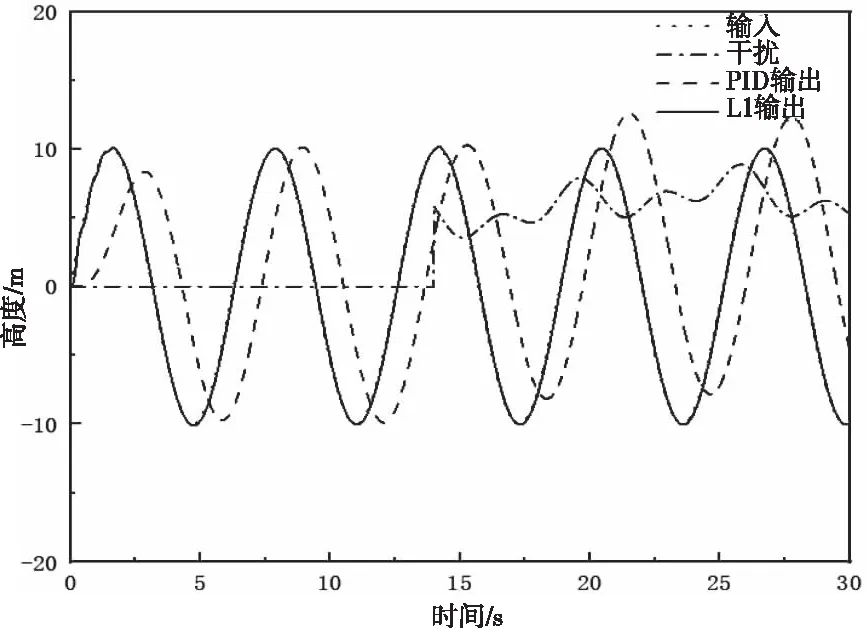
图11 输入h(t)=10sin(t)时,加干扰D4(t)
同理,由图8和图10对比见表2。

表2 高度控制系统L1与PID算法比较
同理,对比两者在正弦输入下的抗干扰性,通过对比图9和图11可得,在14s时加入干扰,L1曲线无明显变化,而PID曲线整体上移。综合图8-11可得,L1控制器比传统PID具有更好地抗干扰性,且通过与单闭环俯仰控制系统相比,高度控制系统由于双闭环机制,内外环均可抑制干扰,所以鲁棒性更强。
4.2.2 被控对象参数变动影响
由4.1节中矩阵A、b可得到被控对象的传函形式为
当被控对象模型的参数发生变动时,上式可改写为如下形式
则保持k2=0.5531不变,分别取k1=5.3907、20、40以及保持k1=5.3907不变,分别取k2=0.5531、20、40时,观察高度控制系统输出图像如图12和图13。
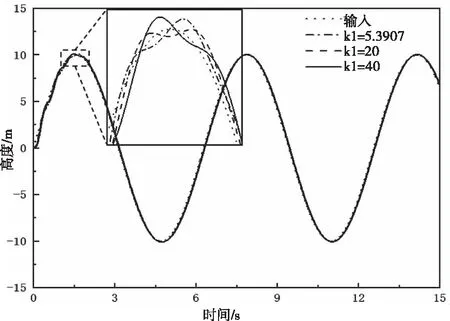
图12 k2不变,改变k1参数辨识效果图
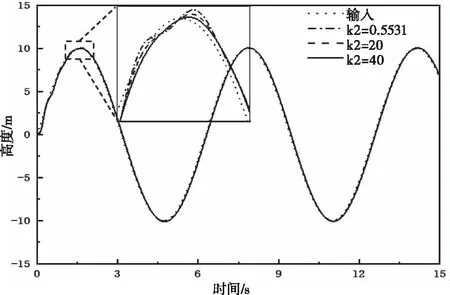
图13 k1不变,改变k2参数辨识效果图
由图12和图13分析可得,当被控对象模型参数发生改变时,无论是改变k1还是k2,系统均存在一段不同的参数辨识过程,图形表现为不同k值的曲线具有不同的振荡波形,但最终三条曲线都会辨识出被控对象模型,并几乎与输入信号波形重合。说明当被控对象模型改变后,系统仍然能够实现对飞艇的稳定控制。
5 结论
本文提出了一种应用于无人飞艇上的L1自适应控制器。根据飞艇控制系统方案,建立了基于飞艇受力的飞行运动学模型。在纵向运动过程中,分为俯仰角控制、高度控制两个部分。文中给出了在两个控制系统中,当输入信号分别为阶跃信号和正弦波信号时,在有干扰和无干扰不同条件时,L1控制器与传统PID控制器的输出对比结果;另外考虑了参数摄动对无人飞艇的控制影响,通过改变模型参数,验证了其对模型的良好辨识效果。综合仿真结果,本文所提出的基于L1自适应控制的无人飞艇纵向控制方案能够使飞艇以期望姿态角上升,进而达到理想高度,并且对外界干扰和参数摄动具有较强的鲁棒性。
猜你喜欢
机电工程技术(2018年10期)2018-12-06 02:26:38
电子测试(2018年15期)2018-09-26 06:01:04
太空探索(2016年12期)2016-07-18 11:13:43
自动化学报(2016年8期)2016-04-16 03:38:51
西北工业大学学报(2015年1期)2016-01-19 03:29:56
百科探秘·航空航天(2015年12期)2015-11-07 07:05:51
百科探秘·航空航天(2015年11期)2015-11-07 07:05:30
百科探秘·航空航天(2015年10期)2015-11-07 07:05:09
哈尔滨师范大学自然科学学报(2015年6期)2015-04-23 08:20:35
