
基于三维数据的受电弓姿态检测方法研究
2023-10-26 11:35郭浩
设备管理与维修 2023年17期
郭 浩
(中国铁路兰州局集团有限公司,甘肃兰州 730030)
0 引言
随着铁路的高速发展,当前动车运营数量在保持高位的同时还在持续增多,为列车的安全运营提出了挑战。传统的单纯依靠人工的检测方式已经被人工、设备相互合作的方式所代替,而基于图像检测的设备更是广泛应用于日常列车检测的方方面面[1]。
受电弓作为电力列车的供能装置,对列车的运行至关重要。弓头姿态异常若不能及时处理,会造成滑板异常磨损甚至“羊角”断裂等严重事故[2]。
传统的图像检测方法,主要是采集二维图像,在二维图像上利用二维特征实现关键故障的检测[3]。基于图像处理的弓头检测方法,易受自然因素影响,成像质量难以保证,系统稳定性不足且二维数据缺乏深度信息,无法完全反应受电弓的实际姿态。
线阵结构光三维测量技术,作为一种测量范围广、精度高、实时性强的高精度三维成像方法,被广泛运用于轨道交通检测中[4]。本文基于线结构光三维成像方法,搭建数据采集系统,并设计受电弓姿态的三维检测方法,快速、准确地实现了受电弓姿态的动态检测。
1 三维采集系统
1.1 线结构光成像原理
相机和线激光安装在同一侧,通过相机拍摄激光线的二维图像。激光器投射线激光到被测物体上,被测物体表面的高度对激光线的形状进行调制,激光线发生形变。相机采集形变的线激光条纹,结合标定参数,可以实现线激光点的三维数据计算[5]。
相机采用小孔成像模型,其像素坐标系与世界坐标系转换关系为:
其中,M1为相机内测矩阵,M2为相机外参矩阵:
激光平面方程为:Ax+By+Cz+D=0
通过预先标定,可以计算得到相机内参、外参以及激光平面方程参数。在已知激光点像素坐标的情况下,即可通过该两个方程联立求得实际的三维坐标。
1.2 数据采集系统
由于列车车型复杂多样,现场安装环境多变且工作距离长,对成像速度和要求较高,因此选择配置视觉组件设计采集系统。
作为市面上帧率最快的相机,Ranger3 通过内嵌的FPGA(Field Programmable Gate Array,现场可编程门阵列)硬件系统,可以直接在采集前端完成激光线提取、点云重构等线阵三维成像功能,特别适合用于动态的线阵结构光测量应用(表1)。
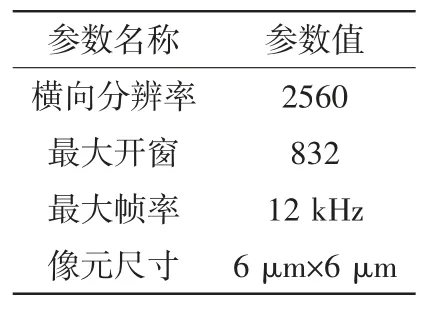
表1 Ranger3 相机参数
采用Ranger3 相机,激光垂直向下照射,相机倾斜拍摄。由于列车升弓与降弓其受电弓相隔1~2 m,光学系统无法同时保障两部分均能清晰成像,因此分别设定了升弓检测相机与降弓检测相机(图1)。

图1 数据采集布局
2 受电弓姿态检测原理
受电弓的姿态是指其翻滚角(或侧翻角)、偏航角、俯仰角。以俯视受电弓为例,y 轴为列车行进方向(轨道方向),x 轴为垂直轨道方向,z 轴为高度方向(垂直xoy 平面或水平面)。如此建立坐标系则翻滚角表示受电弓的绕y 轴旋转的角度,偏航角为受电弓绕z 轴旋转的角度,俯仰角为受电弓绕x 轴旋转的角度。
本文以滑板作为受电弓的模型框架,通过计算滑板上未磨耗区域的端点,来拟合出滑板所在的三维连线,从而构建受电弓的三维几何状态,并计算其具体的姿态角度。
2.1 翻滚角计算
翻滚角表示受电弓绕Y 轴旋转翻角,计算方法为:①寻找滑板两端没有磨耗的区域;②寻找没有磨耗区域的中线;③取左右区域上的端点,并以端点拟合直线,计算其斜率;④如果找到的两条直线斜率相等,则以两条直线的端点拟合直线,并计算斜率;⑤用上一步骤中得到的斜率计算对应的角度,即为受电弓的翻滚角(图2)。

图2 翻滚角计算流程
2.2 偏航角计算
偏航角为受电弓绕Z 轴旋转的角度,计算思路包括:①寻找滑板的中线;②存储中线上所有点对应的X、Y 坐标;③用上一步骤中的所有点拟合直线,计算直线斜率;④计算斜率对应的夹角即为偏航角(图3)。

图3 偏航角计算流程
2.3 俯仰角计算
俯仰角为受电弓绕X 轴旋转的角度,计算思路主要有6个:①寻找滑板两端没有磨耗的区域;②寻找没有磨耗区域的中线;③取左右区域上的端点,并以端点拟合直线,计算其斜率;④如果找到的两条直线斜率相等,则存储两条直线的端点;⑤用步一步骤中得到的点计算平均高度,然后计算前后滑板的高度差;⑥计算高度差与滑板间距的比值,然后该值的反正切,得到的角度即为俯仰角(图4)。
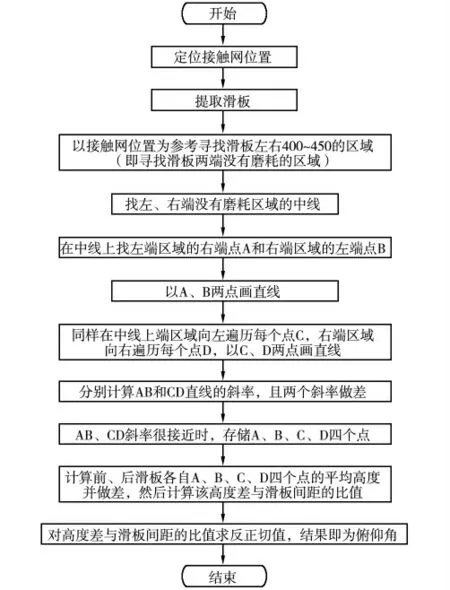
图4 俯仰角计算流程
3 现场测试
本系统设备安装在现场,当列车通过时自动触发采集,并实时计算出滑板姿态结果(图5)。

图5 受电弓采集数据(深度图)
总计采集22 组受电弓数据,测试结果如表2 所示,测试数据曲线统计见图6~图8。
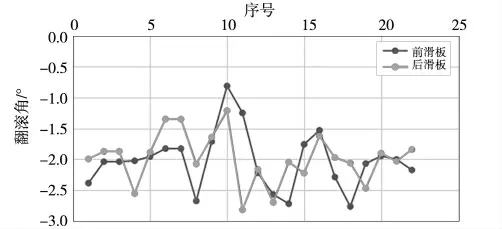
图6 受电弓滑板翻滚角

表2 现场数据测试结果
(1)从图6 可以看出,前后滑板的翻滚角大部分在2°左右、最大不超过3°,最小只有0.815 854°。
(2)从图7 可以看出,大部分在0°~0.5°,滑板的偏航角最大为1.083 99°,最小为0.07°。

图7 受电弓滑板偏航角
(3)从图8 可以看出,滑板的俯仰角很小,最大的只有0.016°。从以上数据测试可以看出,本系统在现场运用可以实现自动实时姿态检测,并取得了较好的验证效果。

图8 受电弓滑板俯仰角
4 总结
基于线阵结构的三维采集系统,可以在列车通过检测设备时,动态地实现三维数据的实时采集,可以保证高效、快速的高精度三维数据获取。本文基于高精度三维数据,对受电弓滑板的姿态检测进行研究并在现场运用,验证效果较好,为受电弓滑板姿态检测提供了新的检测方法。
猜你喜欢
数学物理学报(2022年2期)2022-04-26
中学生数理化·教与学(2019年8期)2019-09-18
小学生导刊(2018年4期)2018-04-18
时代农机(2018年12期)2018-02-14
数学物理学报(2017年1期)2017-06-05
石家庄铁路职业技术学院学报(2017年4期)2017-05-25
上海铁道增刊(2017年2期)2017-04-18
小猕猴智力画刊(2017年3期)2017-03-24
学与玩(2017年12期)2017-02-16
作文与考试·小学高年级版(2016年2期)2016-09-10
