基于ARM 的智能水下搜救机器人的设计★
2023-10-23 03:11王宇杰薛宇彤
现代工业经济和信息化 2023年8期
赵 莹, 王宇杰, 孟 祥, 薛宇彤
(北华大学电气与信息工程学院, 吉林 吉林 132021)
0 引言
在水下救援工作中,水域环境复杂,水流湍急,潜水人员体力限制等因素都成为搜救阻碍,且超过30 m的水下更是有很大的安全风险。新科技的出现给水下救援带来了新的希望,水下救援机器人可以搭载多种传感器,通过上位机进行远程操作,并实时搜寻[1-3]。救援人员通过摄像头成像可以迅速发现溺水人员的位置,在确定目标之后,通过机械臂打捞溺水人员,救援效率大大提高。
1 系统方案设计
系统方案设计如图1 所示,采用32 位高性能ARM Cortex-M3 处理器STM32407IGT6 作为主控芯片。在机器人本体上设计安装摄像头、照明灯等,并且配有良好的水下通讯技术,更好地传输水下图像信息。机器人设计了避碰声呐系统,能够实现水下避障和定位功能。设计了压力、温度、速度、姿态和方位传感单元。采用续航力长、且安全成本低的电池供应系统,使机器人能较长时间在水下作业,还设计了舱门控制单元和弹出式发信单元,用于故障时上浮于水面定位搜寻。水下机器人采用透明亚克力板来密封和固定摄像头,再搭配上摄像头旁边的照明灯,通过软件算法对机器人进行姿态调整,实现全方位、实时、清晰地拍摄。摄像头收集到信息后,通过水声通信传输给电脑上位机。工作人员可以通过手柄,控制水下机器人移动,通过机械臂的末端执行器来实施具体的救援操作。
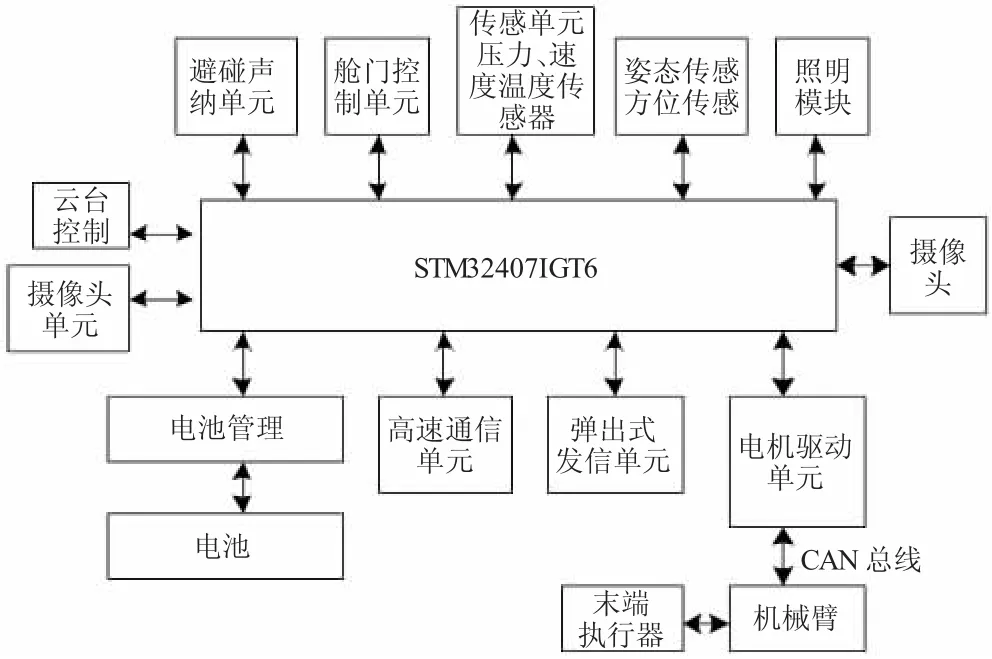
图1 总体方案
2 自动控制系统设计
2.1 总体控制系统
总体控制系统框图如图2 所示,主要包括水上控制器、姿态控制系统和图像控制系统三部分[4-5]。姿态控制系统对水下机器人进行姿态调整,包括水下机器人悬停控制、水下机器人前进、后退以及上浮下潜等控制。图像控制系统主要是采集水下图像,包括拍照、录像等操作。

图2 总体控制系统
2.2 机器人控制方式
机器人由伺服电机进行控制,如图3 所示,采用开环控制和闭环控制相结合的方式来完成水下机器人的控制操作,开环控制上位机可以直接控制水下机器人的运动,闭环控制则是利用姿态传感器来反馈水下机器人的姿态,然后对水下机器人进行位置控制。
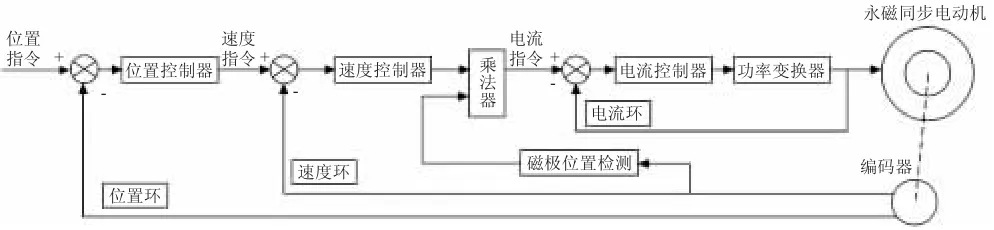
图3 伺服电机控制系统
3 水下通讯与能源供应
3.1 能源系统
机器人采用了锂离子电池作为系统的主要能源供给方式,锂离子电池利用锂离子的浓度差进行储能和放电。
3.2 水下通讯
近距离无线射频通信采用远高于水声通信(50 kHz 以下)和甚低频通信(30 kHz 以下)的载波频率。若利用500 kHz 以上的工作频率,配合正交幅度调制(QAM)或多载波调制技术,使100 kbit/s 以上的数据的高速传输成为可能。
水下射频通信原理图如图4 所示,水下射频通信速率高,可以实现水下远近距离的高速率无线双工通信,从岸上控制中心传递远程控制信号给水下机器人,机器人接收信号并进行水下作业,收集各种水下环境信息上送至岸上控制中心。

图4 水下射频通信原理
4 水下机器人避障和导航(定位)技术
避碰声纳[6]采取波束自适应稳定及垂直波束相控技术,主要完成对水下环境的感知,其中,STM32 主控板主要负责采集避碰声纳的图像数据,然后进行声纳图像处理和障碍物目标信息特征的提取,并将提取出来的障碍物信息发送到控制中心单元,避碰声纳系统示意图如图5 所示。

图5 避碰声纳系统
本文选择了多普勒声纳计程仪。根据多普勒原理,运动着的船只以频率f 向海底发射超声波信号,当从海底反射回来的信号频率被接收时,就会产生一个频率差值Δf,这个频率差值Δf 与船运动的速度存在线性关系。多普勒声纳计程仪就是用来测量舰船在水中运动速度和航程的水声导航设备,这种计程仪最突出的特点是具有很高的灵敏度,在200 m 左右水深范围内测相对海底速度,能精确到0.01 节,并且能同时测出纵向和横向速度。
5 救援机械臂设计
采用4 个自由度的机械臂,当整个机器人系统到达某特定位置时,水下机器人处于悬停状态,由肩关节、肘关节和腕关节3 个自由度运动配合,可以使末端执行器到达空间任意位置,从而完成机械手准确地触碰目标物。加之末端执行器的夹持,可以完成由机械手处于收缩状态到夹取目标物的整个操作。机械臂样图如图6 所示,机械手和机械臂建模如图7 和图8所示,水下搜救机器人的整体建模如图9 所示。

图6 机械臂样图
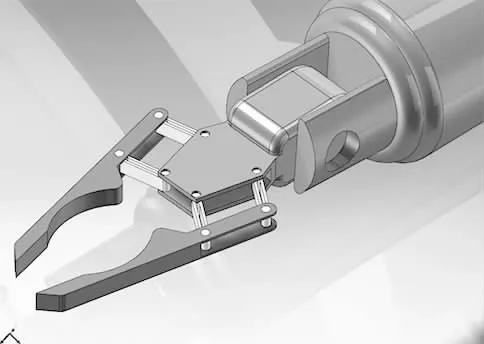
图7 机械手建模

图9 水下机器人整体建模
6 软件设计
水下智能搜救装置工作程序流程如图10 所示。

图10 工作程序流程
7 结论
本文设计了一款32 位高性能ARM Cortex-M3处理器为核心的水下智能搜救装置,该装置以水下搜救为主,机械臂打捞配合,包括了影像设备、避碰声纳设备、多传感器技术、电机伺服系统以及完好的水下射频通讯技术,该装置可以在不同深浅、不同浑浊程度的河流水域开展快速有效的搜救工作,有效减少溺水事故的发生。并且该装置会向着体积更小、兼容性更强、智能化程度更高的方向发展。
猜你喜欢
青少年科技博览(中学版)(2023年5期)2023-06-26
中国交通信息化(2022年9期)2022-10-28
汽车工程师(2021年12期)2022-01-18
考试与评价·八年级版(2020年5期)2020-10-29
装备制造技术(2020年12期)2020-05-22
电子测试(2018年14期)2018-09-26
电子测试(2018年13期)2018-09-26
通信电源技术(2016年1期)2016-04-16
火控雷达技术(2016年2期)2016-02-06
汽车维修与保养(2015年8期)2015-04-17