
基于HyperMesh 与ABAQUS 联合仿真的大口径望远镜结构的性能分析
2023-10-21 09:00付云雷周超王志臣陈涛王泽悟
长春理工大学学报(自然科学版) 2023年5期
付云雷,周超,王志臣,2,陈涛,王泽悟
(1.中国科学院长春光学精密机械与物理研究所,长春 130033;
(2.中国科学院大学,北京 100049;3.中国人民解放军32036 部队,重庆 400000)
随着军民需求的日益增加,小口径的天文望远镜逐渐无法满足现有的使用需求,众多科研院所把研究目标集中在设计与建造大口径望远镜上面。大口径望远镜的安装基础一般分为两类,一类是放置于海拔较高且视宁度较好的望远镜站址;另一类是将望远镜与车辆载体集成一体化的车载望远镜。对于前者,望远镜口径往往可以做成数米量级,但对于后者而言,由于车辆载体本身高度、宽度的限制,望远镜口径的上限值往往较低。
随着大口径望远镜的需求逐渐增加,近些年对于大口径望远镜的研究也逐渐成为光机领域研究的热点。周超等人[1]分析了望远镜在风载和地震波载荷作用下的动态响应情况并给出了响应结果。邓永停等人[2]对2 m 口径望远镜跟踪机架伺服控制系统的动态性能进行了测试和分析,实验结果验证了跟踪机架控制系统的良好性能。安其昌等人[3]比较并总结了三种主流的风载研究分析方法的优缺点与适用场合。赵勇志等人[4]建立了1.2 m 口径望远镜跟踪机架有限元模型并分析了望远镜模态与风载对望远镜性能的影响。杨立保等人[5]以地平式U 型跟踪架为例,分析了采用方钢管桁架结构设计的四通与转台的固有频率并与扫频测试结果进行比较。兰斌等人[6]计算了在以不同风速和俯仰角组合共16 种工况下非稳态风载的功率谱密度作为输入下的望远镜光学元件的位移响应。曹玉岩等人[7]提出了一种基于二维随机场的风速时程模拟方法,从时域角度对望远镜在风扰动作用下的响应进行了时程模拟以及系统性能预测。胡佳宁等人[8]系统性地总结了地基大口径望远镜主镜的定位系统和支撑系统,并对国外大口径望远镜的主动支撑技术进行了详细介绍和总结分析。有限元仿真技术在大口径望远镜的设计中扮演着不可或缺的角色,目前国内外的望远镜在其设计中都离不开有限元的建模分析。随着望远镜口径的增大与日益提高的性能需求,问题与挑战也随之增加。通过借助有限元仿真工具进行准确地建模与合乎实际的仿真,其分析结果可对望远镜在各种工况下的使用性能提供预测。
本文以2 m 量级望远镜为例,借助HyperMesh与ABAQUS 强大的前后处理功能,对望远镜整体结构进行了详细的有限元建模,研究了望远镜主光学组件在重力载荷作用下主光学组件位移与倾角随俯仰角的变化规律。同时还研究了主光学组件在风载作用下的静态和动态响应,分析了其对主镜的面形与系统指向精度的影响。
1 望远镜系统有限元模型的建立
在构建望远镜结构系统时所使用的全局坐标系如图1 所示。望远镜系统主要由俯仰轴系、方位轴系、主镜组件、次镜组件等模块组成。俯仰轴系与方位轴系分别赋予了光学系统在水平轴方向与竖直轴方向的旋转自由度,使得整个望远镜系统获得对目标的精确跟踪与定位观测的功能。主镜组件包含主镜、主镜室、底支撑与侧支撑,主镜与主镜室之间的相对连接即是通过底支撑与侧支撑的协同作用实现的。次镜组件中的桁架结构与四叶梁结构用于支撑次镜。
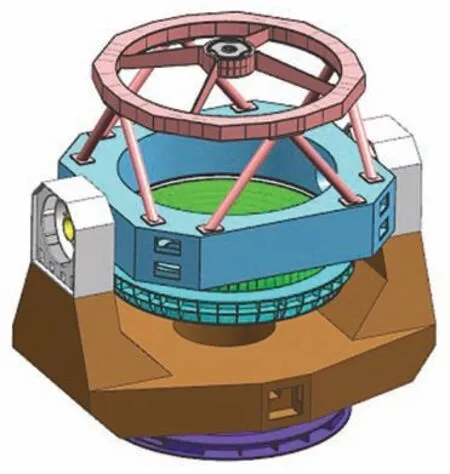
图1 望远镜系统三维结构
在望远镜结构系统中,首先定义X、Y、Z坐标系,具体为X正向表示从左立柱指向右立柱的俯仰轴方向;Z正向表示从次镜指向主镜的方位轴方向;Y正向按照右手定则确定方向,即Y正向表示从望远镜后方指向望远镜前方的与两个轴系分别垂直的方向。在HyperMesh 中建立了望远镜系统的有限元模型,如图2 所示。
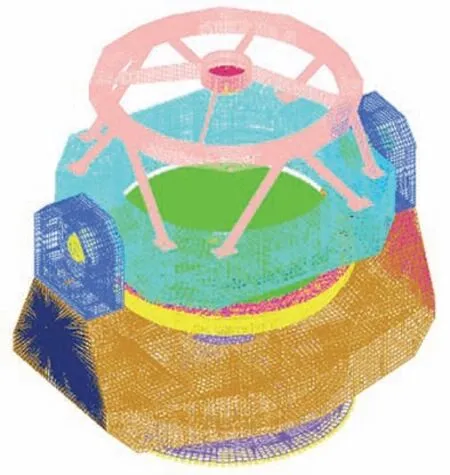
图2 望远镜系统结构有限元模型
为了实现主次镜的轻量化目标,主次镜材料均采用碳化硅,同时将主次镜的内部设计为蜂窝状结构。由此选择壳单元模拟主镜与次镜。望远镜跟踪架的基座、转台、四通、立柱与主镜室均采用板材焊接加工成型得到,因此其结构也同样采用壳单元模拟,次镜桁架与四叶梁由于其在长度方向的尺寸远大于截面尺寸,因此也仍采用壳单元模拟。全部模型划分后共产生158 620 个单元,286 845 个节点。
在俯仰轴系与方位轴系中,轴承是整个轴系中最为关键的零件之一。一方面,轴承要承受望远镜系统的大部分重量,轴承的强度与刚度需要满足很高的要求;另一方面,轴承性能的优劣决定了伺服控制系统能否将方位角与俯仰角控制在所需要的精度之内。由此,针对望远镜系统所使用的方位轴承与俯仰轴承,本文提出使用转动副模拟轴承。在对望远镜轴承模拟的过程中,出现了许多简化方法。其中,杆单元由于只承受沿杆轴向的拉力与压力,比较符合轴承的实际受力情况,得到许多研究人员的青睐。同样的,弹簧单元由于可以承受拉力与压力,可以通过赋予弹簧的轴向刚度值进而模拟轴承。此外,GAP 间隙单元也可以对轴承进行简化并与实际较为相符[9-10]。然而,上述对轴承的简化方式均存在同样的问题,即轴承在承受外载荷的作用时,其刚度值不是一个确定值。同时,大型望远镜轴承一般需要定制,轴承的刚度值很难通过实验获取其真实值。分析轴承的使用原理可知,轴在与轴承内圈进行连接后,以转动副的方式与轴一同相对轴承外圈做旋转运动。ABAQUS 软件中提供了一种连接属性bushing,可以通过定义沿局部坐标系下的6 个自由度方向的刚度值模拟轴承。通过计算俯仰轴承的承载与俯仰轴承钢球的变形之间的关系,可近似得到俯仰轴承的刚度值量级。对于俯仰轴承所具有的旋转自由度,通过设置较小的刚度值模拟,该值在设定时参考经验值。对于俯仰轴承所具有的平动自由度,根据计算得到的刚度值量级进行设置。对于其余自由度,选择高出该计算刚度值若干数量级的刚度值进行设定。该方法同样适用于方位轴承。
2 望远镜结构有限元分析
2.1 望远镜在重力载荷作用下的分析
在对望远镜整体结构进行静力学分析时,由于望远镜整体质量较大,因此重力对望远镜的影响是最先需要考虑的。望远镜在工作过程中,由于俯仰角需要跟随观测目标的位置不断调整,光学组件在重力的作用下会发生不同程度的变形,从而引入各种像差。本文以望远镜俯仰角0°、5°、15°、30°、60°和90°为例,对光学组件进行了重力载荷作用下的变形分析。其中,俯仰角0°表示望远镜光轴指向天顶,俯仰角90°表示望远镜光轴指向水平,研究结果着重关注重力载荷引起的光学组件的离焦和倾斜。
分析结果表明,主镜与次镜的平均位移均随俯仰角的增加呈现减小趋势,在俯仰角为0°时,即望远镜光轴指向天顶,主镜处最大平均位移达到80.0 μm,次镜处最大平均位移达到93.4 μm,如图3(a)所示。与主次镜位移随俯仰角变化趋势相反,主镜与次镜的平均倾角均随俯仰角的增加呈现增大趋势,在俯仰角为90°时,即望远镜光轴指向水平,主镜处最大平均倾角达到1.97″,次镜处最大平均倾角达到0.57″,如图3(b)所示。比较俯仰角从0°变化到90°的变化过程发现,主镜处的平均位移变化与平均倾角变化范围均较次镜更大。
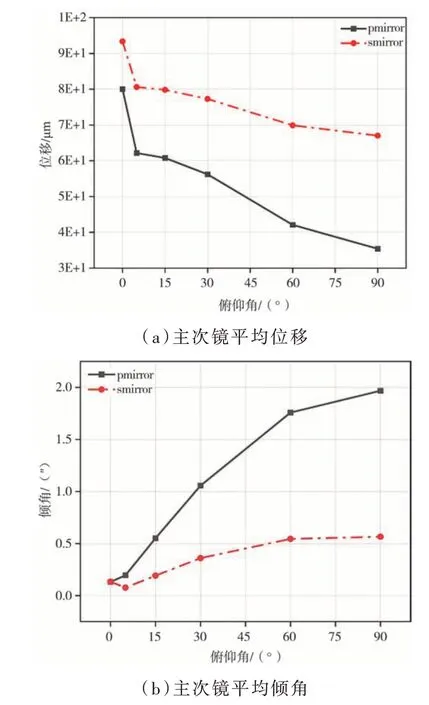
图3 主光学组件在不同俯仰角下的位移与倾角
图4中曲线表明,主次镜的相对位移在Z向变化较大且呈现随俯仰角增加而逐渐增大的趋势,而在X向与Y向则无明显变化趋势。主次镜的相对倾角在X向变化较大且呈现随俯仰角增加而逐渐增大的趋势,而在Y向与Z向则无明显变化趋势。当俯仰角为90°时,主次镜相对位移在Z向分量为0.03 mm,相对倾角在X向分量为1.40″。分析主次镜在不同俯仰角下的相对位移与相对倾角的各方向分量的变化关系,在望远镜光机装调时将会对光学组件有关的离焦与倾斜的调整提供参考。

图4 主光学组件在不同俯仰角下的相对位移与相对倾角
图5给出了望远镜结构在重力载荷作用下的变形云图,其中当俯仰角为0°时,即望远镜光轴指向天顶时,最大变形位置在次镜与四叶梁处,最大变形量约为87.3 μm。当俯仰角为90°时,即望远镜光轴指向水平时,最大变形位置在四叶梁处,最大变形量约为90.5 μm。
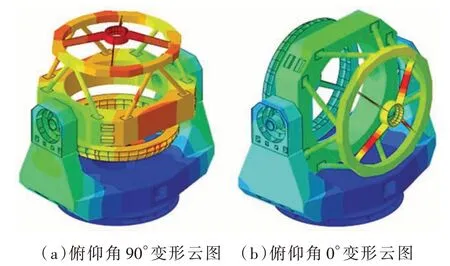
图5 望远镜结构在重力作用下的变形云图
2.2 望远镜模态分析
模态分析是设计望远镜结构时必须考虑的因素之一,望远镜结构的整体模态直接影响望远镜对各种输入激励的动态响应。此外,模态分析是计算望远镜各种动力学响应的基础,模态分析详细给出了每种模态的振型与频率。针对本文研究的望远镜结构,在后处理结果中提取了前10 阶模态,如表1 所示。
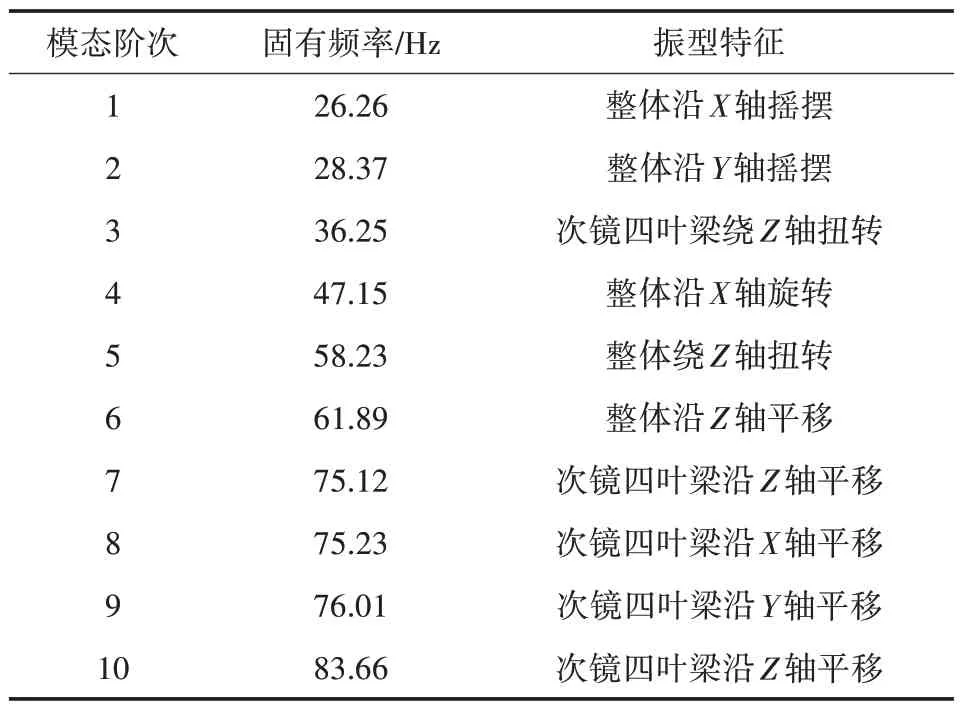
表1 望远镜前10 阶固有频率与振型
2.3 望远镜风载分析
望远镜由于其结构庞大,当风载作用于望远镜结构和镜面时,光学组件的成像质量与望远镜系统的控制精度将受到影响。因此,研究望远镜在风载作用下的动态响应得到越来越多研究工作者的重视。风是由空气流动造成的一种自然现象,风载就是风对结构造成的随机作用。风载可视为由静态风载与动态风载两部分组成。其中,静态风载由平均风速作用在结构表面引起,动态风载由物体造成的风的湍动和随机风速本身引起。静态风载的表达式如下:
式中,F为静态风载作用力,单位为N;P为风头压力,单位为Pa;A为结构的迎风面积,单位为m2;CD为风阻系数;ρ为该海拔高度处的空气密度,单位为kg/m3;为平均风速,单位为m/s。
动态风载即随机风载。其研究方法一般分为两种,即等效风速法与风载功率谱分析法。等效风速法考虑了静态风载与动态风载综合作用的效果,计算时需要将平均风速换为等效风速后代入公式(1)进行计算,其中等效风速的常用计算方法如公式(2)。等效风速法从原理上仍然属于一种线性时域计算方法,在实际分析动态风载对于望远镜结构的影响时,风载功率谱分析法有着更加广泛的应用。
式中,Vequ为等效风速;Vm为平均风速;σv为风速的标准差。
风载功率谱分析法的原理是,由风的随机风速的能量谱得出力频谱,加载到物体上得出物体对风载的响应。这种方法可以获得物体响应与频率的关系,属于一种频域分析方法。下面推导随机风速能量谱的表达式。假设在离地高度z处的风速由平均风速与随机风速组成,如公式(3),风头压力与风速的二次方成正比,由此可推导得到公式(4)。由公式(4)知,在某一瞬时下的风压可以近似看作是平均风速产生的风压与随机风载产生的风压的叠加。
式中,z为离地高度,单位为m;Vt为瞬时风速,单位为m/s;z为离地高度z处的平均风速,单位为m/s;Vr为随机风速,单位为m/s;Pt为在某一瞬时下的风压,单位为Pa;Pr为由随机风载产生的分压,单位为Pa。
在天文望远镜工程中,有关风载的研究积累下很多的数学模型。其中,在描述地面风运动的数学模型中,比较常见的是Von Karman 谱和Davenport 谱[11]。在后续对风运动研究的数学模型中,已有的功率谱模型得到改进,新模型更加准确地描述了低频区域的能量分布特征,同时将离地高度这一因素考虑在内,称为Kaimal 谱,其表达式如下:
式中,f为频率;Vτ为地面摩擦剪切风速,单位为m/s;z0为地面粗糙度,对于开阔地选为0.01 m,对于乡村选为0.3 m。
当风作用到大型结构上时,结构对风的衰减作用是明显的。为了表征这一现象,引入动力响应因子Xaero,其表达式如公式(8)。对于大型结构,由于它自身尺寸很接近风的波长,因此空气动力响应因子的值一般近似取为1[12]。
由上述公式可推导得到随机风载的风速能量谱与风压能量谱,分别如公式(9)、公式(10)所示。
本文选取静态风载分析方法与风载功率谱分析法研究望远镜结构对风载的动态响应。有限元计算软件为大型结构的仿真分析提供了便捷且准确的手段。其中,静态风载分析一般在通用静力学通用分析模块实现,风载功率谱分析则借助有限元软件中的PSD 分析模块进行计算。
2.3.1 静态风载分析
假设本文研究的望远镜工作环境处于长春市某地区,该地区海拔高度为300 m,其基本风压的标准值为650 Pa。考虑望远镜工作时所在环境的地形地貌,同时考虑望远镜工作时外部防护罩对风具有一定程度的阻挡作用,导致望远镜工作时其承受的实际风速是外部风速的十分之一,由此推导得出实际作用于望远镜上的风压值约为13 Pa,因此作用于望远镜的风速为4.67 m/s,公式如下:
式中,c*为望远镜工作时所在环境的地形地貌系数;P*为长春市基本风压的标准值,单位为Pa。
在ABAQUS 中构建主镜的有限元模型,如图6 所示。望远镜在工作状态中,主镜沿俯仰轴旋转的范围为-90°~+90°。当望远镜光轴指向水平方向时,主镜呈现竖直站立的姿态,此时在重力载荷的作用下,主镜面形会表现得较差。当主镜处于该位置时,位于主镜与主镜室之间的12个侧支撑则保证了主镜的位置姿态。在图6 中,约束这12 个侧支撑处的平移与旋转自由度,同时沿镜面法向施加压力用以模拟静态风载对主镜面形的作用。
图6 主镜在静态风载作用下的有限元模型
图7为主镜在静态风载作用下的变形云图,通过提取镜面节点与相应节点处的位移可计算得到镜面面形的PV 值为20.15 nm,RMS 值为3.32 nm[13]。在图6 中主镜有限元模型的基础上对主镜同时施加重力载荷,计算得到的主镜变形云图如图8 所示,此时镜面面形的PV 值为115.14 nm,RMS 值为19.91 nm。主镜的一阶模态为461 Hz,模态振型为沿着光轴方向前后振动,如图9 所示。
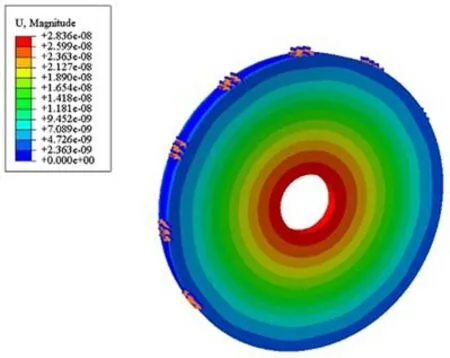
图7 主镜在静态风载作用下的变形云图
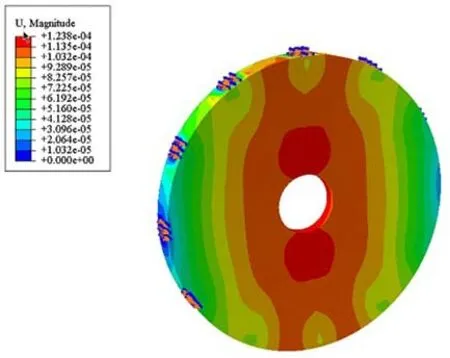
图8 主镜在静态风载与重力综合作用下的变形云图
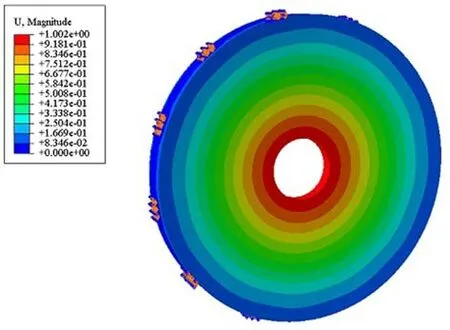
图9 主镜的一阶约束模态振型
2.3.2 风载功率谱分析
根据上述计算公式得到随机风载的压力谱PSD 曲线,如图10 所示。
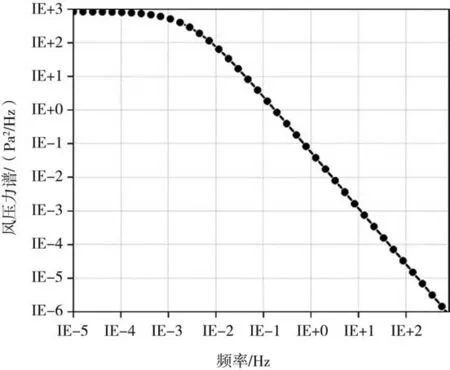
图10 随机风载压力谱的PSD 曲线
在望远镜光轴指向天顶位置处,假设随机风向沿Y轴正向,将压力谱曲线加载到望远镜结构沿Y轴正向的迎风面处,将主镜与次镜均简化为质量点处理,得到如图11 所示的望远镜在随机风载作用下的有限元模型。
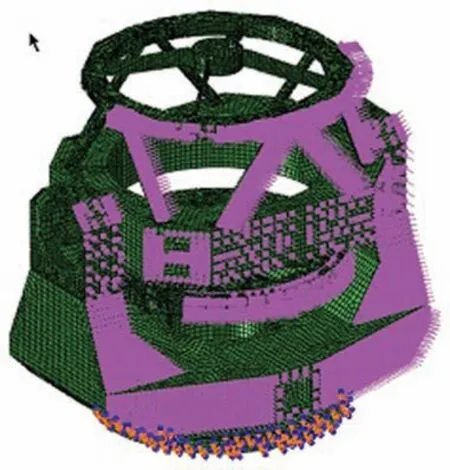
图11 随机风载作用下的望远镜有限元模型
借助ABAQUS 中的PSD 模块对望远镜进行随机响应分析,其中主镜与次镜的位移响应PSD曲线如图12 所示。
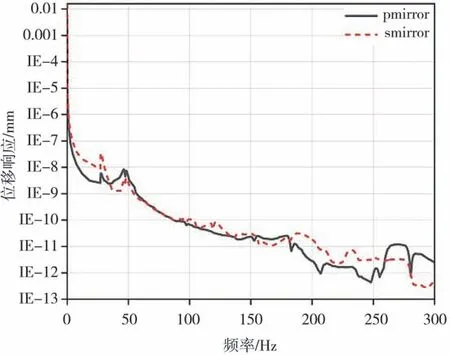
图12 主光学组件在风压力谱PSD 下的位移响应
由此计算主镜与次镜在三个方向的位移RMS 值,见表2。由表2 中数据可知,当对望远镜施加沿Y向的随机风载时,望远镜主光学组件在Y向的位移也会较其他方向更大。其中主镜在Y向和Z向的位移较X向大很多,因此主镜X向位移可忽略。对于次镜,Y向的位移较X向和Z向均大很多,因此次镜X向位移与Z向位移均可忽略。主次镜在Y向的相对位移为7.744E-3 mm,由此造成的望远镜光轴指向误差为0.941 5″,其值满足光学设计要求。
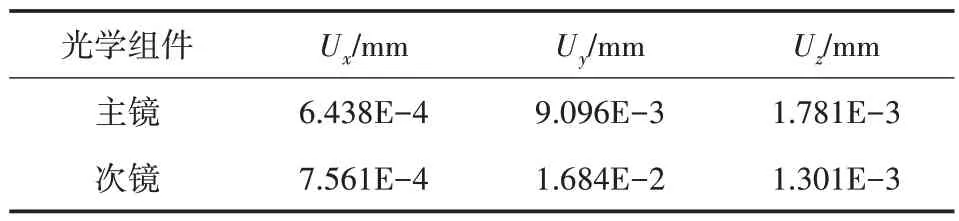
表2 主光学组件在各个方向的位移RMS 值
3 结论
(1)在重力载荷作用下,主镜与次镜的平均位移均随俯仰角的增加呈现减小趋势,主镜处最大平均位移达到80.0 μm,次镜处最大平均位移达到93.4 μm。主镜与次镜的平均倾角均随俯仰角的增加呈现增大趋势,主镜处最大平均倾角达到1.97″,次镜处最大平均倾角达到0.57″,主镜处的平均位移变化与平均倾角变化范围均较次镜更大。
(2)在重力载荷作用下,主次镜的相对位移在Z向变化较大且呈现随俯仰角增加而逐渐增大的趋势,主次镜的相对倾角在X向变化较大且呈现随俯仰角增加而逐渐增大的趋势,主次镜相对位移的最大Z向分量为0.03 mm,相对倾角的最大X向分量为1.40″。
(3)主镜在光轴指向水平方向时,静态风载与重力载荷会引起镜面面形质量下降,其中静态风载引起的镜面RMS 值变化相对于重力载荷是小量,但对于越来越大口径的望远镜而言仍不可忽视。
(4)随机风载的压力谱作用于望远镜时,会对主光学组件造成0.941 5″的光轴指向误差。有限元的分析结果,将有助于望远镜在实际光机装调中光学组件的调整过程,同时对后续大口径望远镜结构的设计与优化有一定的借鉴意义。
猜你喜欢
应用光学(2023年3期)2023-06-05
光学精密工程(2022年23期)2023-01-06
机械与电子(2020年1期)2020-01-15
铁道建筑(2018年12期)2019-01-04
航天返回与遥感(2018年2期)2018-05-17
光学精密工程(2016年11期)2016-12-19
光学精密工程(2016年5期)2016-11-07
振动工程学报(2015年1期)2015-03-01
激光与红外(2014年8期)2014-03-20
机电产品开发与创新(2014年4期)2014-03-11
