带有输出约束机械臂系统的固定时间控制*
2023-10-21 09:00:30刘嘉睿胡梓凯王建晖张春良
组合机床与自动化加工技术 2023年10期
王 晨,刘嘉睿,胡梓凯,王建晖,张春良
(广州大学机械与电气工程学院,广州 510006)
0 引言
机械臂系统广泛存在于工业领域,具有多变量、强耦合及高度非线性等特点,系统往往存在输入死区[1-2]、输入磁滞[3]、状态约束[4-5]等非线性约束,因此机械臂的智能控制一直以来是一个重要的研究课题。SELMIC、WOO等[1-2]分别利用RBFNN和模糊逻辑系统(fuzzy logic system,FLS) 处理输入死区问题,实现了输入死区的自适应补偿。HE等[3]研究了输入磁滞的补偿问题。HE、LIU等[4-5]研究了机械臂的状态约束问题。
上述方法可以很好的应对系统存在的不同约束。在实际应用中,这些控制方案的实施需要系统进行高频的采样和信号传输,然而系统的通信资源是有限的,这可能会导致通信时延、丢包等问题,从而影响系统性能。WANG等[6]针对一类带有输入磁滞的不确定非线性系统,提出了一种神经网络自适应自触发控制方法。XING等[7]针对一类非线性系统提出了3种不同的事件触发控制方案。基于事件触发机制,王建晖等[10]研究了多智能体系统的预设时间事件触发式协同控制方法。这些事件触发控制方案可以在保证良好控制性能的前提下,减小输入信号的更新频率,从而缓解系统的通信压力。值得一提的是,关于机械臂系统的事件触发控制的相关研究报道甚少,这值得进一步深入研究。
此外,收敛速度是系统性能的一个重要指标。近年来,有限时间控制以其更快的收敛速度、更高的控制精度和更强的鲁棒性成为研究热点之一,并取得了许多研究成果[11-13]。DU等[11]研究了一阶多智能体系统的有限时间共识控制算法。在此基础上,DU等[12]研究了高阶多智能体系统的有限时间共识控制问题。有限时间控制虽然有许多独特的优点,但受控系统的收敛时间与系统的初始状态有关,且一旦系统的初始状态偏离平衡点较远,系统的收敛时间变得很长。为了解决这一问题,POLYAKOV[14]提出了一种固定时间控制算法,并给出了稳定性的定义和理论依据。与有限时间控制不同,固定时间控制的收敛时间上界只与控制参数有关,与系统初始状态无关,可以使系统在一个固定时间内稳定。基于此优点,固定时间控制算法很快被应用于机器人位置跟踪控制[15]、航天器相对位置跟踪控制[16]、无人机姿态控制[17]等领域。
多年来,在对机械臂控制的研究中,提出了许多控制方法,比如:PID控制[18]、滑模控制[19]、神经网络控制[20]等。这些方法多数只能保证系统的渐进稳定,理论上需要无限长的时间实现系统的最终稳定,这不能满足工业领域对于快速稳定的需求。当系统存在输出约束、不确定性和通信资源约束等问题时,设计控制器实现系统的固定时间稳定是具有挑战性的。受上述研究的启发,本文基于反步控制技术,研究了带有输出约束机械臂系统的固定时间稳定控制方法。与现有结果比较,本文控制方法的新颖之处如下:
(1)针对系统可能存在的不确定性和输出约束,现有的多数控制方案需要大量的通信资源,而系统的通信资源是有限的。基于障碍Lyapunov函数和RBFNN,设计了一种事件触发机制,可以减小控制信号的更新频率,从而缓解通信压力。
(2)基于固定时间稳定控制理论,设计了一种固定时间稳定控制方法,系统可以在不同的初始状态下快速收敛,且系统的收敛时间上界与系统初始状态无关。
1 问题描述和预备知识
1.1 系统模型
考虑含有n个自由度的机械臂动力学方程为:
(1)

性质1[21]:惯性矩阵M是对称且正定的。


1.2 预备知识

(2)
则系统的平衡点是实际固定时间稳定的。系统的收敛时间满足:
(3)
式中:0<ϑ<1,且系统的收敛域为:
(4)
引理2[10](杨氏不等式):对于∀b1∈R和∀b2∈R,有:
(5)
式中:(a-1)(c-1)=1,a>1,c>1,ε>0。
引理3[7]:对于∀α∈R和δ>0,有:
(6)
(7)
引理4[23]:对于∀xi>0,i=1,2,…,n,有:
(8)
引理5[23]:对于m1>0,m2>0,a1∈R,a2∈R和k>0,有:
(9)
1.3 径向基神经网络
径向基神经网络 (RBFNN) 可以精确地以任意精度逼近复杂的非线性函数F(X),可以由下式描述:
F(X)=W*TS(X)+ε(X)
(10)

(11)
式中:j=1,2,…,n,Cj∈Rn为高斯函数中心点向量,wj∈R为高斯函数的宽度。
2 固定时间控制设计
2.1 控制器设计
首先引入误差系统如下:
(12)
式中:z=[z1,z2,…,zn]T为位置跟踪误差,e=[e1,e2,…,en]T为速度跟踪误差,qd=[qd1,qd2,…,qdn]T是系统的期望输出,α=[α1,α2,…,αn]T是待设计的虚拟控制律。
选择障碍Lyapunov函数V1:
(13)

对V1求导可得:
(14)
设计虚拟控制律αi如下:
(15)

将式(15)代入式(14)可得:
(16)
选择Lyapunov函数V2:
(17)
对V2求导可得:
(18)
式中:

工程应用中,系统的惯性矩阵和重力矢量等是难于获得的,所以本文考虑Fi(Xi)是未知的,并利用RBFNN对其进行逼近处理:
(19)

根据杨氏不等式可得:
(20)

将式(20)和式(19)代入式(18)可得:

(21)
为了节约系统的通信资源,设计事件触发机制如下:
(22)
(23)

根据事件触发机制,只有满足触发条件mi(t)|≥ρi|τi(t)|+si时,控制力矩τi才会被更新。这种机制可以减小更新的频率,从而节约通信资源。
根据式(22)和式(23),对于∀t∈[ti,k,ti,k+1),下式成立:
(24)
式中:γi,1(t)和γi,2(t)是时变参数,且满足|γi,1(t)|≤1和|γi,2(t)|≤1。
进一步,可以得到:
(25)
利用引理2和3对式(25)化简可得:
(26)
(27)

将式(26)、式(27)代入式(21)可得:

(28)


(29)
式中:ri>0是设计参数。
对V3求导可得:
(30)
(31)
式中:λ1i>0,λ2i>0。
将式(31)代入式(30)可得:
(32)
根据杨氏不等式可得:
(33)
(34)
式中:ι=(1-p)p^[p/(1-p)]。
将式(33)和式(34)代入式(32)可得:

(35)
(36)
根据杨氏不等式可得:
(37)
(38)
式中:ωi>0。
综合式(36)~式(38)可得:
(39)
将式(39)代入式(35)可得:
(40)
式中:

(41)

(42)
式中:

最终,可以得到:
(43)

2.2 稳定性分析
根据前面控制器的设计和分析,可以得到以下定理:
定理1:对于由式(1)描述的n自由度机械臂系统,在保证假设1的前提下,设计的控制律(23)、虚拟控制律(15)和(27)、自适应律(31)、事件触发机制(22)和(23),可以实现系统的实际固定时间稳定,即:
(1)系统的所有闭环信号都是有界的,系统在一个固定的时间内稳定,且系统输出满足约束要求;
(2)无Zeno现象出现。
(44)
且收敛时间满足以下不等式:
(45)
limt→ti,k+1mi(t)=ρi|τi(t)|+si
(46)

本文所提出的方法可以实现系统的有限时间稳定,收敛时间满足式(45)。从该式可以看出,系统的收敛时间上界与系统的初始状态无关,只与设计参数有关。
3 仿真与分析
考虑图1所示的二连杆机械臂系统,其中,m1和m2分别为连杆1和连杆2的质量,l1和l2为连杆长度,I1和I2为惯性矩,lc1和lc2为连杆质心位置。系统的动力学模型给定如下:
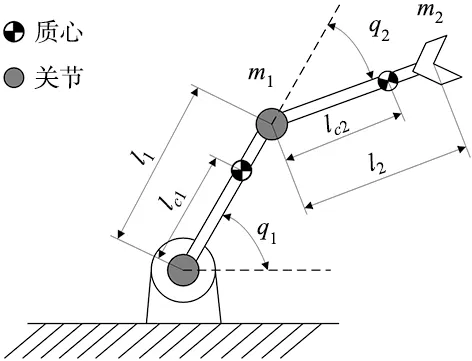
图1 二连杆机械臂示意图

从仿真结果图2~图9可知,闭环系统中所有信号都是有界的。在图2和图3中,系统输出可以很好地跟踪期望的轨迹。从图4和图5中可知,3种不同初始状态下,跟踪误差均被快速控制在±0.05 rad内,收敛时间约为0.2 s,这说明系统在不同初始状态下均可实现快速收敛。控制力矩如图6和图7所示,初始阶段存在冲击。在图8中,自适应参数呈现一定的周期性的规律。触发事件的时间间隔如图9所示,最长间隔长达0.18 s,最小间隔为0.01 s,所以无Zeno现象发生。此外,表1详细地记录了各时段的触发数据,关节1和关节2的事件触发总次数分别为325次和358次,远远少于传统时间触发控制方法的1000次,所以本文所提方法有效地减少了控制信号的更新频率,即:节约了系统的通信资源。
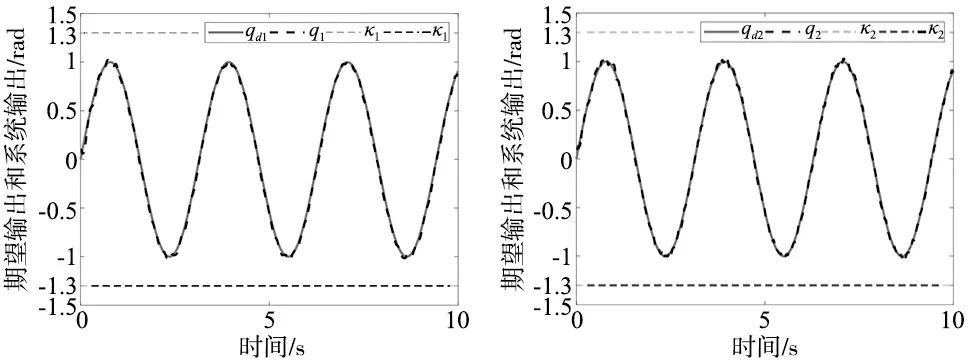
图2 关节1的跟踪曲线 图3 关节2的跟踪曲线

图4 关节1的跟踪误差 图5 关节2的跟踪误差

图6 关节1的控制力矩 图7 关节2的控制力矩
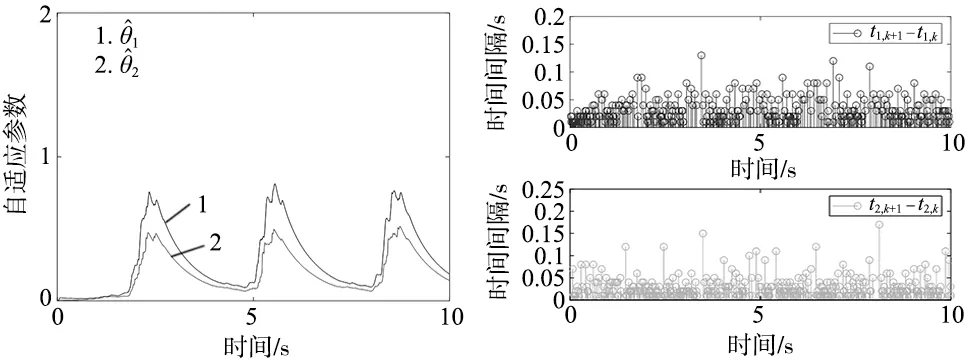
图8 自适应参数曲线 图9 触发事件的时间间隔
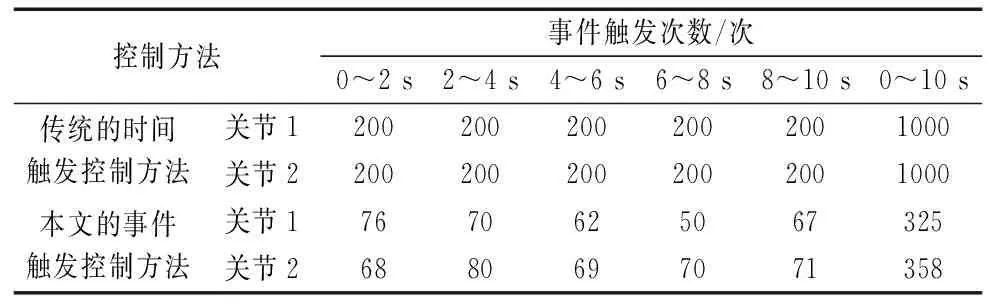
表1 事件触发次数对比
4 结论
针对带有输出约束、模型不确定性的机械臂系统,基于反步控制技术,设计了一种事件触发式固定时间稳定控制方法。在反步控制的框架中,引入了障碍Lyapunov函数对位置误差进行约束,并且理论证明了可以使系统满足输出约束要求。为了缓解系统的通信压力,设计了事件触发机制来减小控制信号的更新频率。此外,利用RBFNN拟合了控制器设计过程中出现的不确定非线性函数,并设计了特殊的自适应律和虚拟控制律,实现了系统的实际固定时间稳定。仿真实验表明,所提出的控制方法可以使系统在不同的初始条件下快速收敛,且满足预设的输出约束要求。与此同时,节约了大量的系统通信资源,且避免了Zeno现象发生。
猜你喜欢
哈尔滨商业大学学报(自然科学版)(2022年4期)2022-08-18 13:07:30
加油站服务指南(2021年4期)2021-07-21 02:29:22
吉林大学学报(理学版)(2020年3期)2020-05-29 06:31:40
当代工人(2020年8期)2020-05-25 09:07:38
数学年刊A辑(中文版)(2020年1期)2020-05-19 00:30:30
三峡大学学报(自然科学版)(2019年5期)2019-10-17 02:24:22
小溪流(画刊)(2017年12期)2018-01-10 16:07:29
科技知识动漫(2016年8期)2016-07-29 20:40:09
儿童故事画报·发现号趣味百科(2015年12期)2016-01-25 00:41:49
三峡大学学报(自然科学版)(2015年2期)2015-07-25 06:42:56