师从自然的仿形飞行器
2023-10-19 14:14沈海军余翼
百科知识 2023年19期
沈海军 余翼

2021年6月1日,一条长1.8米、全身碧蓝的“大飞鱼”掠过上海市郊上空,历经数分钟飞行后稳稳落地。它便是同济大学飞行器工程研究团队的最新研究成果—一架仿生飞鱼无人机。
人类仿生飞行的想法由来已久,严格讲,《封神榜》中的雷震子、中国明代的飞行火器“神火飞鸦”均可以被纳入仿生飞行的范畴。仿生飞行学致力于发现飞鸟、飞鱼、昆虫等会飞生物的优良飞行特性,并将这些性能运用到飞行器研制之中。如今,仿生飞行学已发展成为现代航空领域的重要方向之一。
仿生与仿形飞行器
自然界中,经过亿万年的优胜劣汰,许多生物进化出了诸如高效的气动外形、可靠的内部结构、独特的环境感知系统等优良特性,这无疑给人类发展新科技和设计新产品提供了重要参考。20世纪初,仿生技术逐渐走进人们的视野。直到20世纪60年代,美国科学家斯蒂尔提出仿生学概念,仿生学才被人们视为一门专门学科纳入科研和生产当中。
近年来,人们将仿生学运用到飞行器设计中,以提升飞行器的性能,并且取得显著效果,于是就有了“仿生飞行器”。飞行器仿生具有不同的分类,包括形态仿生、结构仿生和肌理仿生等。其中,形态仿生也叫仿形仿生,是指飞行器从外形上对自然界生物进行模仿;结构仿生则是指飞行器在内部结构上参考自然界中的特定生物;肌理仿生是指飞行器在表面设计时参照生物体表的微观肌理。不管何种仿生,目标都是一致的,那就是寄希望以此增强飞行器的性能。

在诸多仿生飞行器的研制思路中,仿形是最常见的仿生设计形式之一。缤纷多彩的大自然里,万物形态各异,为人们设计飞行器外形提供了原始的参照样本。
早在2000多年前的古埃及,人们参照鸟类的形态制造出“古埃及木鸟”,其外形已初具滑翔机的雏形;2019年,同济大学的研究团队更是给上述“古埃及木鸟”装上动力,并把它送上了蓝天。20世纪初,人们热衷于对鸟类、蝙蝠和昆虫的形态进行模仿,制作出了形形色色的飞行器,但因为当时的技术水平有限,这些飞行器的飞行性能低下,尚无法与自然界中的原型生物相提并论。
在人类发明飞机之前,最重要的技术突破是将飞行器分为两部分开展设计,一部分是以机翼为主体的增升部分,另一部分是以引擎为主体的动力装置,并据此提出了飞机的设计思路,为飞机的发明奠定了最初的理论基础。
如今,人们已经研制出了各种各样的飞行器,但飞机设计师们仍孜孜不倦地尝试着将仿形运用到飞行器设计中,试图获得性能更佳的飞行器。
仿鸟飞行器
鸟类能够在天空中自由翱翔,令长期只能生活在地面上的人类羡慕不已,因此,鸟类成为仿形飞行器最早、也是最受欢迎的模仿对象。这种飞行器常被称作“仿鸟飞行器”。目前,仿鸟飞行器主要有两个研究方向:一是模仿鸟类形态的滑翔机,这种类型的飞行器机翼是固定的,凭借其出色的气动外形可以获得良好的滑翔能力;二是仿鸟类的扑翼机,即通过翅膀的扑动来获取升力和机动能力。
自古以来,人们便对能够在天空中自由飞翔的鸟类充满了美好向往。宋朝张骘的《太平御览·文士传》中就提到了张衡设计、制造的一款木鸟,它依靠腹部特殊的控制装置可滑翔数里远。15世纪,意大利著名设计家和画家达·芬奇对鸟类观察分析近20年时间,最终绘制出人力驱动仿鸟扑翼飞行器的设计手稿。

1929年,英国科学家设计出一款依靠人力驱动的仿鸟飞行器。其机翼模仿鸟的翅膀设计,翼展达9米,每只“翅膀”重4.5千克;利用人力挥动来维持滑翔,最远可以滑翔300米,持续飞翔的性能较弱。
由于技术所限,到20世纪中期以前,仿鸟飞行器只能通过人力驱动,更类似于滑翔机,与鸟类比,飞行效率相对低下。
现代仿鸟类飞行器是在20世纪90年代才开始逐渐发展起来的,其驱动方式已转变为使用引擎或者电机驱动。1991年,加拿大研究人员首次研制出利用引擎驱动的仿鸟扑翼飞行器,它由一个以甲醇为主要燃料的引擎驱动,最大功率可达1马力,起飞质量为3.9千克,最快飞行速度可达 15.2米每秒。
其后,各国开始注重提高仿生飞行器的空中飞行效率。2004年,美国特拉华大学的研究人员研制出名为“麻雀”的扑翼飞行器。该飞行器外形模仿小型雀类,通过扇动“翅膀”达到向前飞行的目的。其翼展约为15厘米,持续飞行时间为1分钟。在这款飞行器的基础上,特拉华大学的研究团队研制出了“蜂鸟”系列扑翼飞行器。该系列飞行器是将蜂鸟的形状等比例放大,将翼展增加至48厘米。不过,其外形依然十分轻巧,重量只有50克。由于“蜂鸟”系列扑翼飞行器的“翅膀”不仅可以上下扑动,而且可以改变俯仰角度,飞行的灵活性得到了极大提升。
为了提高仿鸟飞行器的飞行能力,令它们更接近所模仿的鸟类,人类在飞行器的形态和结构设计上展开了深入研究。2010年,德国费斯托公司以海鸥为原型,研制出仿鸟扑翼飞行器“智能鸟”。“智能鸟”的出现将仿鸟飞行器的研制提升到了一个新的高度,它的翼展达到2米,全身采用碳纤维材料骨架制成,重量只有450克。飞行器表面加上白色蒙皮以后,形态与海鸥极为相似,在空中飞翔时甚至引来一群真正的鸟类伴飞。
2012年,美国航宇环境公司研发出了“蜂鸟”超微型飞行器,其翼展为16厘米,质量为10克,最快飞行速度能达到10米每秒,续航时间可达8分钟。“蜂鸟”仿生飞行器利用了仿生学原理,在飞行过程中的能量转换、气动性能和续航能力方面均有极大突破。

2018年,日本早稻田大学研究人员参照欧洲雀鹰设计了一款仿鸟无人机。研究者先是在正常飞行的欧洲雀鹰的正下方进行拍摄,由此获得了清晰的欧洲雀鹰轮廓边缘照片,并据此边缘设计了飞行器的机翼和尾翼轮廓,在该基础上加以优化,确定了合适的翼形截面,最终获得了良好的三维气动外形。
2019年,我国科学家按照悉尼银鸥的外形,设计了一款混合驱动的仿生无人机。该无人机既可以像普通扑翼飞行器那样通过扑动翅膀来飞行,又可以通过安装在腹部的四个可伸缩旋翼的运转悬停于空中,其机首处还安装有一套可伸缩螺旋桨系统,进一步拓展了驱动的方式,为人们对仿鸟飞行器的设计提供了一种新的思路。

仿鱼飞行器
鱼儿能够在水中快速地游动,流线型的外形赋予了它们优良的流体力学性能。良好的外形在水中能够起到减阻的作用,运用到飞行器上,同样可以达到空中减阻的效果。
飞鱼是一种能在海面上连续滑翔的鱼类。它虽然没有鸟类那样灵活有力的翅膀,但是“飞行”起来毫不逊色,较强壮的飞鱼一次可以滑翔180米,连续滑翔的时间可达43秒,滑翔距离可以远至400米,堪称大自然的奇观。因此,仿生飞鱼飞行器近些年备受人们关注。
1988年,美国宾州西彻斯特大学研究人员针对33种199只飞鱼样本开展了基于形态学的空气动力学研究。研究人员系统地探究了飞鱼的翼面积、翼展、翼载荷、长宽比与其体形之间的关系,并基于飞鱼胸鳍和腹鳍的形状和位置开展了机翼设计,最后将设计出的机翼的飞行性能与其他滑翔机和扑翼机进行对比,得出了在高速飞行条件下,基于飞鱼形态设计的机翼具有较高升阻比,空气动力学表现与鸟类滑翔时相类似的结论,为后续基于飞鱼的仿生设计提供了理论和数据支撑。

2011年,美国麻省理工学院的研究团队研制出一款仿生飞鱼两栖飞行器。这是世界上第一款有实验数据支撑的仿生飞鱼飞行器。该飞行器既可以在水里游动,又可以从水中跃入空中滑翔。其翼展达0.32米,身长0.25米,重约145克,密度与水接近,因此,它在水中游动时几乎可悬浮在水里。通过对真飞鱼的形态模仿,这款仿生飞鱼两栖飞行器成功克服了推进功率不足的限制,最快以5米每秒的速度冲出水面,完成跨介质的飞行。
2013年,美国斯坦福大学的研究人员发布了一款以飞鱼为模板设计的无人机,其翼展为70厘米,身长30厘米,重约30克。它可以通过一个压紧的弹簧弹射起飞,在距离地面1米高处能够获得4米每秒的水平速度,最远可滑翔5米,其滑翔性能在同时期不依靠动力维持推进的仿生飞鱼飞行器中是最好的。

2019年,浙江大学的邓见团队依照飞鱼的气动外形,设计了一款仿生飞鱼跨水气介质的无人平台,其机身长25厘米,排水量为0.19千克。研究团队采用计算流体力学的手段,探究了仿生飞鱼飞行器在水下潜行、水面滑跑和加速起飞整个过程的动力学特性,验证了该气动形态的仿生飞鱼飞行器依靠尾鳍摆动助跑起飞的可行性。
除了以飞鱼为仿生飞行器设计的原型之外,研究者对其他鱼类也开展了仿生学设计。例如,瑞士的聪明鱼(Smartfish)公司以金枪鱼为原型,设计出仿金枪鱼飞机。国内也有学者依据旗鱼外形,设计了仿旗鱼倾转旋翼飞行器;依据飞鱼外形,设计了仿飞鱼可旋转组合式机翼飞行器等。
其他仿形飞行器
自然界中,除了鸟类和鱼类有着良好的气动性能之外,亿万生物中仍然有很多种类在经历了漫长岁月的自然选择后,进化出优良的气动外形,值得人们开展仿生学研究。这些物种包括种类繁多的昆虫、蝙蝠、水母,等等。其中,最受人们关注的是基于昆虫的仿生飞行器。
自然界中大約有100万种已知昆虫,这些昆虫中有许多种类能够灵活地在空中飞行,它们体形较小,却在微小尺度上具备惊人的气动特性,为飞行器的仿生设计提供了丰富的素材库。
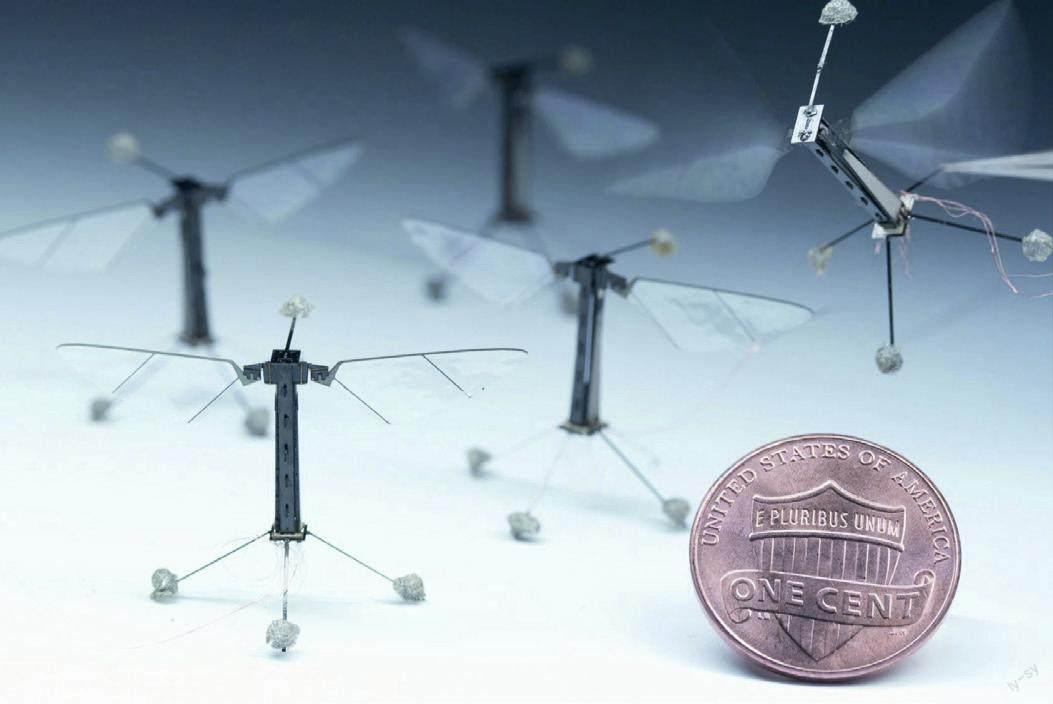
2013年,哈佛大学研究人员以双翅目蜂蝇为原型,研制了一种微型仿昆虫扑翼飞行器。其总重仅为80毫克,双翅翼展为3厘米,可以提供超过1.3牛的升力,左右两翅的驱动机构功率为19毫瓦。受到电池技术的限制,这种微型仿昆虫扑翼飞行器只能通过尾部连接细导线来获取电力。2017年,该课题组再接再厉,对微小结构加以优化,令飞行器可以利用水的张力降落在水面上,并能通过引燃电解水产生的氢气和氧气获得推力,进而达到从水面起飞的目的。

此外,近年来,世界各地还零星出现了仿生蜻蜓飞行器、仿生蝴蝶飞行器等报道。这些均是以昆虫作为仿生对象的仿形飞行器范例。
蝙蝠作为飞行能力优秀的生物,也是很多仿生飞行器的模仿对象。1998年,美国加利福尼亚理工学院和航宇环境公司共同研发出“微蝙蝠”,其总重量为12.5克,翼展为15厘米,能够在空中持续飞行42秒。翅膀采用的还是电池驱动,可以携带微型摄像机、音响传感器和信号传输装置。
另外,水母作为一种海洋生物,经历数亿年的繁衍,对能量的利用效率已经达到相当高的水平,同时也具备低雷诺数(雷诺数是一种可用来表征流体流动情况的无量纲数)下优良的气动外形。依据这种特性,很多飞行器特别是浮空飞行器,也以水母为仿生原型。例如,2014年,纽约大学的研究团队依据水母的外形,设计了一款浮空扑翼飞行器。它可以通过分布在四周的四个扑翼在空中缓缓移动,能量利用效率非常高。中国人民解放军国防科技大学的杨跃能模仿僧帽水母,优化了一种平流层飞艇的气动外形,将其升阻比提高60%以上。
除了以单种生物为原型进行仿生飞行器设计之外,也有研究者以多种生物为模板,分别取其气动性能优异的外形部分结合在一起,设计出新的仿生飞行器。例如,吉林大学学者分别选取翠鸟的头部和龙虱的身体为形态仿生对象,并将它们结合在一起,设计出一款跨介质航行器,为减小飞行器阻力提供了新的设计方案。
同济大学的仿生飞鱼无人机
2019年6月,同济大学沈海军教授团队研制出了一架仿生飞鱼无人机,并成功试飞。

为了获得飞鱼的气动外形,课题组特地在海南购买了四条鲜活的飞鱼。在飞鱼原始模型构建过程中,他们先将飞鱼的胸鳍和腹鳍拿牙签固定,放入冰箱冷冻室冻结,撤去牙签后,飞鱼的形态得以保持。
之后,经过测量,研制團队准确获得了飞鱼的翼展、身长等几何参数,并采用非接触式光学双目立体扫描仪,获得飞鱼原始模型的点云数据;接着,通过Imageware软件,构建出飞鱼模型的外形曲面,进而用逆向设计的方法,获得飞鱼的外形模型。

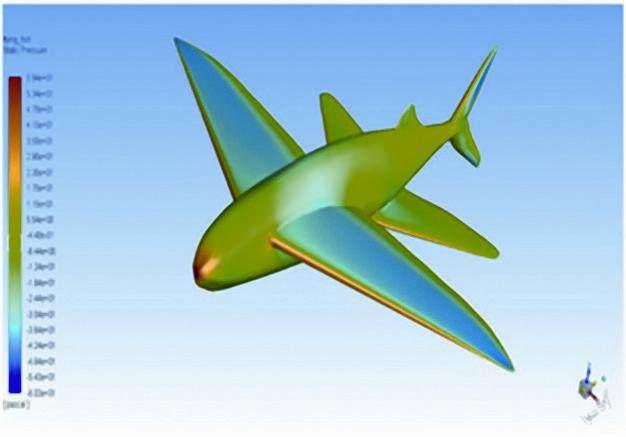
有了飞鱼外形模型,在大型工作站上利用计算流体力学软件对飞鱼进行了理论模拟与分析,团队最终获得了仿生飞鱼无人机的表面压力、流场、压力场以及升力、阻力、升阻比和稳定性曲线等一系列气动性能数据。计算数据显示,仿生飞鱼无人机的气动性能十分优异,其机翼、机身上表面流速较快,可形成低压区,为“飞鱼”提供充裕的升力。
接下来,是仿生飞鱼无人机的结构设计与制作。
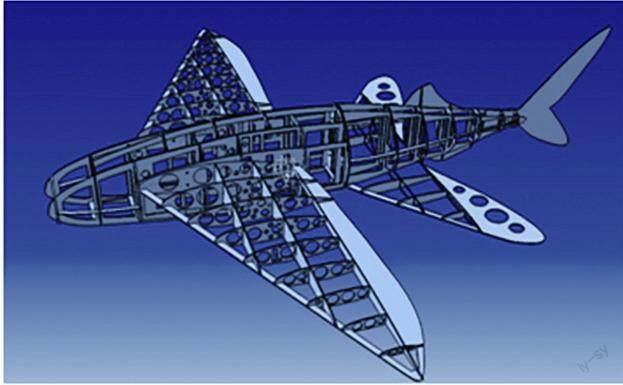
在仿生飞鱼无人机结构设计中,飞鱼的胸鳍被设计成主机翼,用于提供升力;后机身上方和末端分别仿飞鱼的背鳍和尾鳍,充当无人机的垂直安定面和全动方向舵,用于保证航向稳定性和航向运动;前下方设置有“臀鳍”,作为水平安定面,用以维持俯仰稳定。其中,在左右主机翼上各包含了3个墙和9个翼肋,尾缘设计有副翼,用来控制横滚运动;机翼在前机身左右两侧通过碳纤维管对接。在机头部位预留了电机安装支架,可用于安装大马力电机和螺旋桨。
为了制作仿生飞鱼无人机,团队人员先将CAD三维模型各部件投影成二维工程图,获得激光切割的零件加工图纸。再经过激光切割,得到激光切割飞机模型零件。研制团队再经过零件组装、胶水固定、铺设蒙板、打磨、贴迷彩蒙皮、加装动力装置与控制系统等工序,一架仿生飞鱼无人机便大功告成。
制作完成的仿生飞鱼无人机翼展为1.5米、身长1.8米,后三点起落架布局,安装了双叶高效率螺旋桨,由一枚大功率电机和6S锂电池提供动力。
在上海松山区佘山附近的航空飞行基地,仿生飞鱼无人机进行了首次试飞。随着一声令下,无人机启动、滑跑、加速,最终一跃而起。这架无人机在空中的横侧、掉头均表现得十分灵活。经过两圈的巡航后,无人机最终安然落地。

猜你喜欢
军民两用技术与产品(2021年7期)2021-10-13
电影文学(2021年16期)2021-09-29
电影文学(2021年14期)2021-08-11
北京航空航天大学学报(2020年3期)2021-01-14
小学生学习指导(低年级)(2019年12期)2019-12-04
小学生学习指导(低年级)(2019年12期)2019-12-04
厦门航空(2018年11期)2018-11-16
厦门航空(2018年9期)2018-09-15
小学时代(2017年16期)2017-06-19
百科探秘·航空航天(2015年10期)2015-11-07