
跨平面球体平衡器振动抑制机理的研究
2023-10-18 03:48陈延斌陈海卫
振动与冲击 2023年19期
陈延斌, 陈海卫
(1.江南大学 机械工程学院,江苏 无锡 214122; 2.江苏省食品先进制造装备技术重点实验室,江苏 无锡 214122)
转子在线平衡技术是国内外研究的热点与难点,其可分为主动式与被动式等不同形式。
主动在线平衡技术目前在高端机床与航空发动机等领域研究应用较多。张西宁等[1]设计了一种新的注排液式砂轮在线平衡头, 解决了在线平衡过程中因平衡腔满腔导致的平衡能力丧失问题,并提供了一种液体控制策略,包括初次平衡进程和相位注液控制进程两部分。运侠伦等[2]以注液式平衡头为研究对象,针对平衡腔型线展开研究,通过流体仿真分析,完成了容腔结构的优化设计。最后基于高速电主轴试验台,对其平衡效果进行了验证。潘鑫等[3]对电磁滑环式平衡头轴向励磁方式进行改进,设计了一种基于径向励磁和永磁-电磁联合驱动方法的新型平衡头,并通过试验验证了其可行性和有效性。
被动在线平衡技术可分为液体式、球体式与摆锤式等多种,其中球体平衡器具有平衡效果好,结构简单等优点,应用前景广泛。目前球体平衡器多为平面型结构,如图1(a)所示,球体被约束于一个或多个平面圆环滚道中。对于平面转子而言,临界转速之上,由于“自动定心”作用,转子几何型心S将围绕其等效质心C旋转,此时球体所受离心力F存在分量Ft,会驱动球体向偏心C对侧移动,从而对转子偏心起到平衡作用。当偏心与平衡器位于同一平面时,该结构可实现转子质径积的平衡,但当平衡器与偏心异面时,由于平面的约束,单一平衡器作用有限,此时需借助多个平面型平衡器实现转子质径积与质径矩的调节。郭文军等[4]研究了具有两组平面型平衡器的转子结构制振特性及球体的运动规律。王志[5]分析了两组平面型平衡器在不同转速和不同偏心相位下的制振特性,指出了二阶临界转速之上平衡器对质径积与质径矩的调节作用。Ehyaei等[6]建立了带有n组平面型球体平衡器的转子系统动力学模型,分析了系统动态响应与稳定性问题,研究了不同偏心分布情况下转子的平衡问题。DeSmidt[7]建立了带有两组平面型球体平衡器的柔性转子动力学模型,进而通过摄动法讨论了系统稳态解的稳定性,指出了球体平衡器在柔性轴各阶固有频率之间的稳定区域。之后,还建立了带球体平衡器的航发转子模型[8],研究了平衡器在转子突发失衡情况下的抑振机理,指出了球体平衡器应对突发失衡时正常工作的条件。Rodrigues等[9]讨论了带有两组平面型球体平衡器的柔性转子动力学行为,研究结果表明,平衡器对转子质径矩有一定平衡作用,可有效补偿转子轴线的偏移与倾斜。Tadeusz等[10]采用两组平面型平衡器对柔性转子进行振动抑制研究,考虑了平衡器间距及偏心圆盘位置等因素对转子振动特性及稳定性的影响。Haidar等[11]考虑了平衡球间的碰撞与摩擦作用并建立了一种大长径比柔性转子振动模型,分析了平衡球碰撞对系统动态特性的影响。Chen等[12]建立了双盘-双平面型平衡器弹支柔性转子系统的动力学模型,通过分岔理论分析了系统稳定性,并通过试验验证了高速稳定区中球体的平衡作用。

(a) 平面平衡器
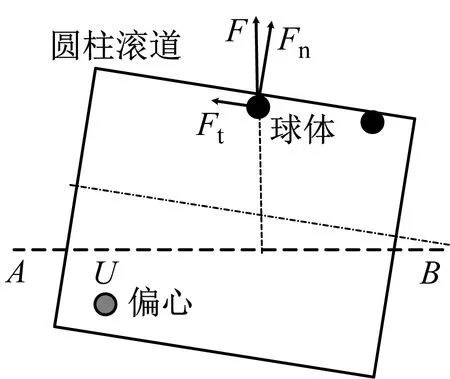
(b) 本文跨平面结构图1 球体平衡器原理Fig.1 Working principle of a plane balancer
事实上,球体具备沿转子轴线方向跨平面运动的能力,如图1(b)所示,临界转速之上,在偏心U的作用下,转子围绕支点AB同步进动,如将球体置于圆柱滚道,不难发现,球体所受离心力F存在分量Ft,其会驱使球体向偏心所在平面运动,可同时实现质径积与质径矩的调节,目前对这种平衡机理的研究缺乏。为此,本文将传统平衡器的平面圆环滚道改为图1(b)所示的圆柱滚道,增加球体沿转子轴线方向运动自由度,从而可同时实现转子质径积与质径矩的调节。在此基础上,对这种跨平面平衡器的振动抑制机理进行了详细分析。
1 动力学模型
带跨平面球体平衡器的弹支转子模型如图2所示,其由一刚性轴和两组弹性支承组成,轴上固定有两组偏心盘和一组具有圆柱滚道的跨平面球体平衡器。考虑到高速条件下,球体所受离心力远大于重力,这里忽略重力影响。建立图2所示坐标系,其中参考系Og-XgYgZg固结于地面;动系Or-XrYrZr固结于转子中心,其随着转子平移,但不随转子旋转,采用[αβγ]描述动系相对参考系的姿态。

图2 跨平面球体平衡器-弹支转子模型Fig.2 Model of an elastically supported rotor with a cross-plane ball balancer
1.1 平衡球的动力学描述
平衡球在Or-XrYrZr中的位置矢量可表示为
rbi=[Rbcos(θ+φi)Rbsin(θ+φi)hi]T
(1)
式中:Rb为平衡球的旋转半径;φi为第i个球相对转子的转角;hi为球体在动系中的Z坐标,用于描述球体沿转子轴向位置的变化。平衡球在参考系Og-XgYgZg中的绝对位置可表达为
sbi=x+Agrrbi
(2)
式中:x为动系原点的位移矢量;Agr为动系相对参考系的姿态矩阵。对式(2)求导,得球体的速度矢量为
(3)

(4)
式中
Mb=

(5)
式中,q=[xyαβφh]T,忽略α,β,φi,hi相关二次项,并设Sb=sin(φ+θ),Cb=cos(φ+θ),最终可得:
其中
式(5)中
1.2 偏心质量的动力学描述
依照1.1节步骤,得偏心质量动力学描述为
(6)
其中,q=[xyαβ]T,令Su=sin(φ+θ),Cu=cos(φ+θ),φ为偏心相对转子的相位,为常量,推导得:
Mu=
Gu=
1.3 偏心盘、刚性转轴与平衡器壳体的动力学描述
对于刚性转轴和偏心盘等,同样可运用式(5)所述方法建立其线性描述
其中:Jd为刚体绕X与Y轴的惯性张量;Jp为刚体绕Z轴的惯性张量,此时,fd=04×1。
1.4 转子支承力与球体所受阻尼力的动力学描述
设转子两端采用线性弹簧阻尼部件支承,以其中一组支承结构为例,其刚度阵和阻尼阵可描述为
其中:k,c分别为X、Y方向支承刚度与阻尼系数;hs为支撑座Z向位置。最终,支承座广义力可描述为
(7)
设平衡球在滚动过程中受到黏性阻尼力作用,其在轴向与圆周方向受到的阻尼力可表达为
(8)
1.5 转子系统振动模型
分析讨论过程中,跨平面平衡器中设置4个平衡球,将各部件动力学描述进行组装,最终得系统整体模型如下
(9)
式中,q=[xyαβφ1φ2φ3φ4h1h2h3h4]T。
2 稳定性分析
2.1 系统平衡解分析
根据质量与质量矩平衡条件,当系统存在n组偏心时,若有m个平衡面,为实现转子平衡,则在该m个平衡面中应添加的配重为[13]
(10)
设mbk、εbk(复数)分别为第k个平衡面中的配重质量与偏心位置,zbk为平衡面与参考面间的距离,mui、εui和zui分别表示第i个偏心的质量、偏心位置(复数)和相对参考面的距离。由于本文跨平面球体平衡器中设置4个平衡球,其轴向位置不确定,可形成多达4个平衡面,此时,式(10)存在无穷多组解,因而本文转子系统平衡解不唯一。
2.2 系统稳定性分析

图3 转子Campbell图Fig.3 Campbell diagram of the rotor
为确定平衡器的稳定与不稳定区,采用文献[14]类似方法,应用Floquet理论对转子周期解的稳定性进行判别。通过Poincaré映射将周期解转化为Poincaré不动点,进而判别其稳定性。考虑如下方程
r(q(0))=FT(q(0))-q(0)=0
(11)
式中:q(0)表示某0时刻转子系统的稳态解;FT(q(0))表示一个周期T=1/Ω后系统的解,采用4阶Runge-Kutta法迭代求解。系统周期轨道的稳定性可由如下单值矩阵的特征值(Floquet乘子)确定
(12)
在图2所示的模型中,设转子两端偏心盘相位分别为φu1=0,φu2=π/2,此时需同时对转子质径积与质径矩进行平衡。考虑如下参数值:平衡球质量mb∈[0.000 5,0.005],稳态转速Ω∈[0 80],其余参数取值如表1所示。

表1 转子系统参数Tab.1 Parameters of the rotor system
首先讨论mb=3 g情况下,系统随转速Ω的单参数分岔特性。图4为转子X向振幅随转速Ω的单参数分岔图,图中实线代表稳定的周期解,虚线代表不稳定的解。可看到,低速阶段,系统周期解虽稳定,但转子本身处于不平衡状态;高速阶段转子X方向幅值基本为0,转子处于平衡状态;在中间转速区间内,周期解不稳定。图5(a)给出了Ω=15 Hz附近,某Floquet乘子随转速的变化情况,可见其沿着实轴穿越出单位圆,此时系统发生鞍结(SN)分岔,系统周期解也变得不稳定,图5(b)给出了Ω=43 Hz附近,某对Floquet乘子的变化情况,可见,该对乘子从单位圆外部穿越入至内部,系统周期解也从不稳定转为稳定。

图4 转子X向振幅随转速Ω的单参数分岔图Fig.4 One-parameter bifurcation diagram showing variations of the vibration amplitude of the rotor with the increase of the rotation speed Ω
(a) 鞍结分岔

(b) Hopf分岔图5 Floquet乘子穿越单位圆Fig.5 Variations of the Floquet multipliers
图6给出了系统周期解随平衡球质量mb与转子转速Ω变化时的双参数分岔图。图中可分为稳定区Ⅰ、Ⅱ和不稳定区,其中稳定区Ⅰ为完全平衡区,此区域内,球体可实现转子质径积与质径矩的完全平衡;稳定区Ⅱ为不平衡稳定区,此时平衡球质量不足或转速过低,系统难以实现完全平衡,其具体可细分为稳定区Ⅱ1和Ⅱ2。在稳定区Ⅰ与稳定区Ⅱ1之间,系统发生了叉形分岔(BP),叉形分岔点处mb的取值为完全平衡系统偏心所需的球体最小质量。稳定区Ⅰ与不稳定区之间由Hopf分岔线分隔。不稳定区范围分布较广,图中虚线给出了图3中转子各临界转速所处位置,可看出,不稳定区几乎横跨了一阶临界转速到三阶临界转速间的全部区域。当球体质量较低时,在一阶临界转速和三阶临界转速之间存在一小块稳定区,但随着平衡球质量的增大,该区域会消失,不稳定区会扩大。

图6 球体质量mb-转速Ω双参数分岔图Fig.6 Two-parameter bifurcation diagram upon variations of mb and Ω
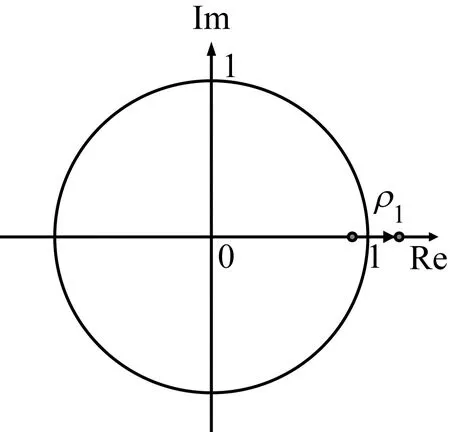
图7和图8描述了球体质量mb=2.5 g情况下系统若干双参数分岔图。其中图7(a)为转子支承刚度k与转速Ω的双参数分岔图。可看出随着支承刚度k的增大,稳定区Ⅰ向高速区移动,这可能由于刚度k的增大使得转子临界转速提升所致;不稳定区总体呈带状分布,其同样随着转子支撑刚度的增大而向高转速区移动。图7(b)为支承阻尼c与转速Ω的双参数分岔图,不难看出,支承阻尼对稳定区Ⅰ的影响较大,当c较大或较小时均会使得稳定区Ⅰ有所减小。图8(a)为球体阻尼cb与转速Ω的双参数分岔图。可见,球体阻尼对稳定区Ⅱ影响较小,但对稳定区Ⅰ影响较大,当cb降到0.01 N·s/m以下时,不稳定区快速向高转速区扩张。图8(b)为圆柱滚道轴向边界hbm与转速Ω的双参数分岔图,在高速区间内,稳定区Ⅰ与稳定区Ⅱ间存在叉形分岔边界。可见hbm对低转速区域的影响较小,而在高转速区,稳定区Ⅱ将随着hbm的减小而向高速区偏移。

(a) 支承刚度k-转速Ω双参数分岔图
(b) 支承阻尼c-转速Ω双参数分岔图图7 支承刚度k-转速Ω、支承阻尼c-转速Ω双参数分岔图Fig.7 Two-parameter bifurcation diagram upon variations of k and Ω, variations of c and Ω
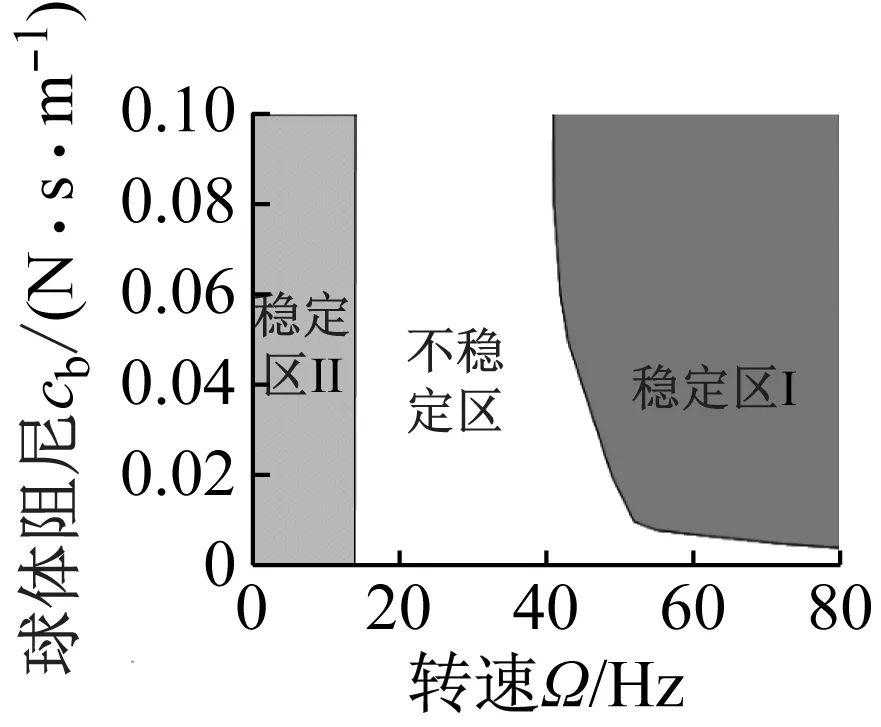
(a) 球体阻尼cb-转速Ω双参数分岔图

(b) 平衡器轴向边界hbm-转速Ω双参数分岔图图8 球体阻尼cb-转速Ω、平衡器轴向边界hbm-转速Ω双参数分岔图Fig.8 Two-parameter bifurcation diagram upon variations of cb and Ω, variations of hbm and Ω
3 数值仿真验证

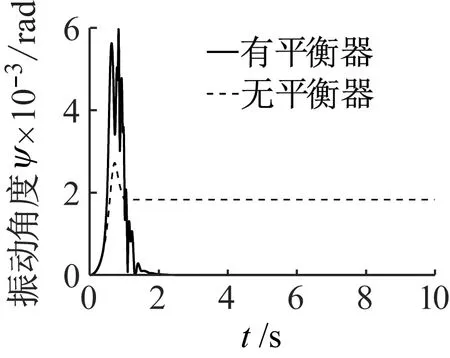
图9给出了Ω=60 Hz,mb=1 g条件下转子系统的响应曲线,不难看出,安装平衡器后系统稳态振幅和振动角度均有一定程度的减小,但并未降到0,这本质由平衡球质量过小导致,此时平衡器平衡能力不足。可见,仿真结果与图6中稳定区Ⅱ1的特性一致。

(a) 振幅
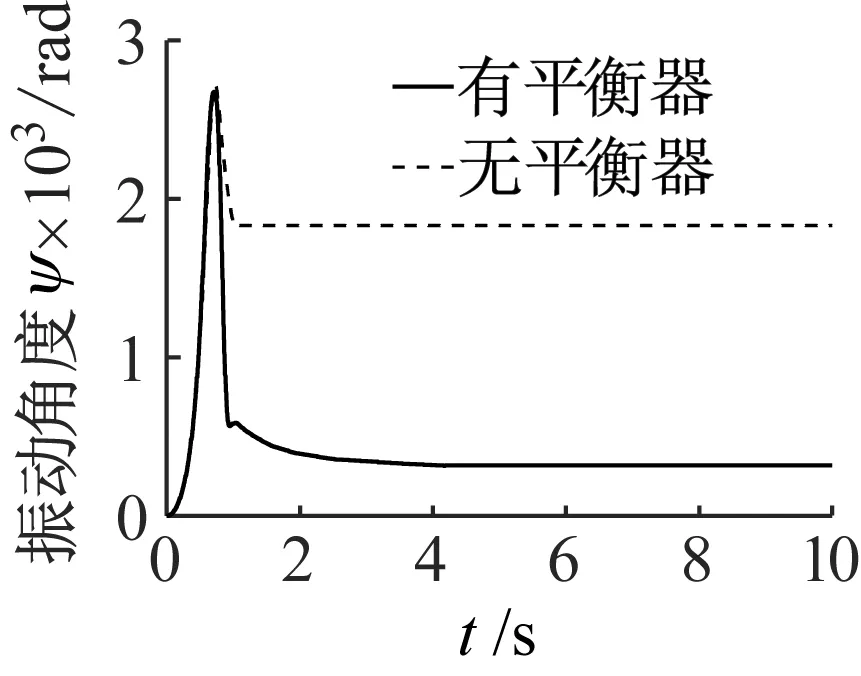
(b) 振动角度图9 Ω=60 Hz,mb=1 g时转子响应曲线Fig.9 Dynamic response of the rotor when Ω=60 Hz and mb=1 g
图10显示了Ω=10 Hz,mb=3 g条件下转子系统的响应曲线,此时系统处于稳定区Ⅱ2,从图10可看出,安装平衡器后系统的稳态振幅与角度均有明显的增大,这反映出稳定区Ⅱ2中平衡器的反作用。

(a) 振幅
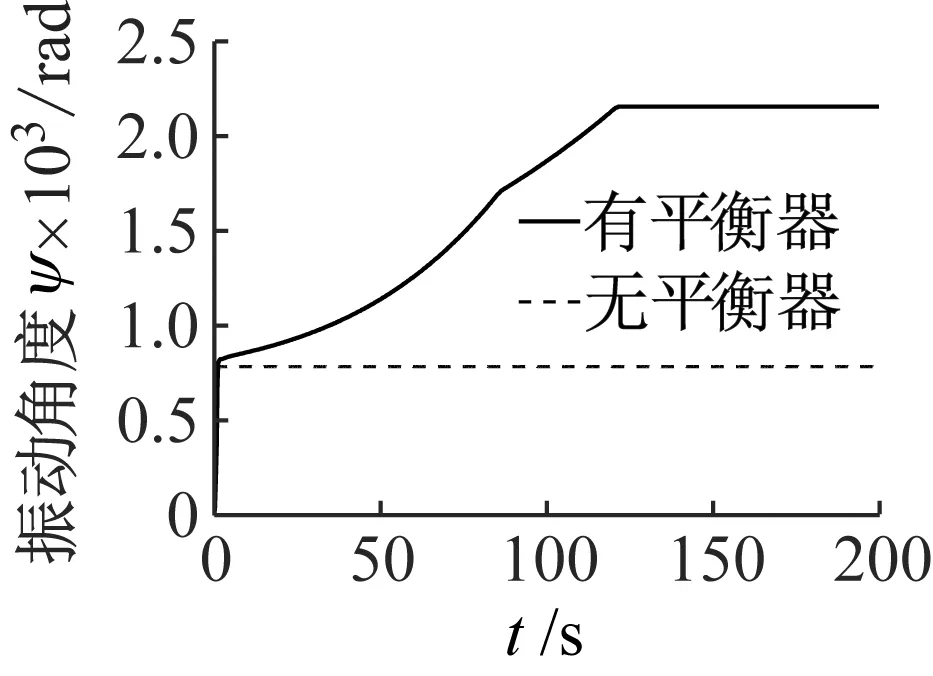
(b) 振动角度图10 Ω=10 Hz,mb=3 g时转子响应曲线Fig.10 Dynamic response of the rotor when Ω=10 Hz and mb=3 g
图11显示了Ω=60 Hz,mb=3 g条件下转子系统的响应,系统处于稳定区Ⅰ中,不难看出,安装平衡器后,系统稳态振幅与振动角度均降到0,实现了转子质径积与质径矩的完全平衡。
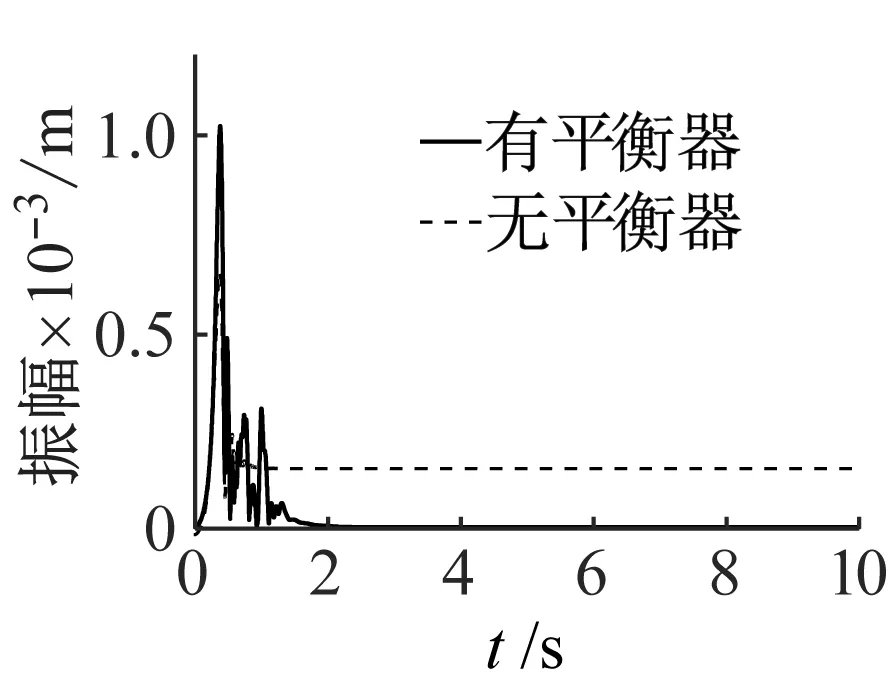
(a) 振幅
(b) 振动角度图11 Ω=60 Hz,mb=3 g时转子响应曲线Fig.11 Dynamic response of the rotor when Ω=60 Hz and mb=3 g
图12给出了Ω=30 Hz,mb=3 g条件下系统的响应,可看到,转子振幅和振动角度不能保持稳定状态,其本质由球体与转子旋转无法同步所致,这与图6中不稳定区所对应的特性一致。
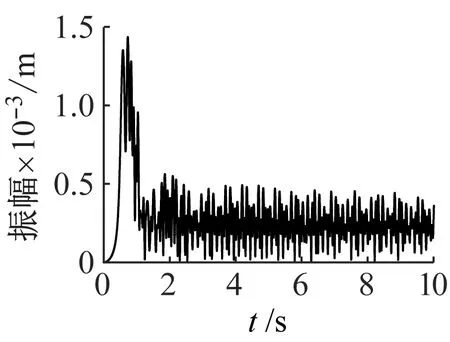
(a) 振幅
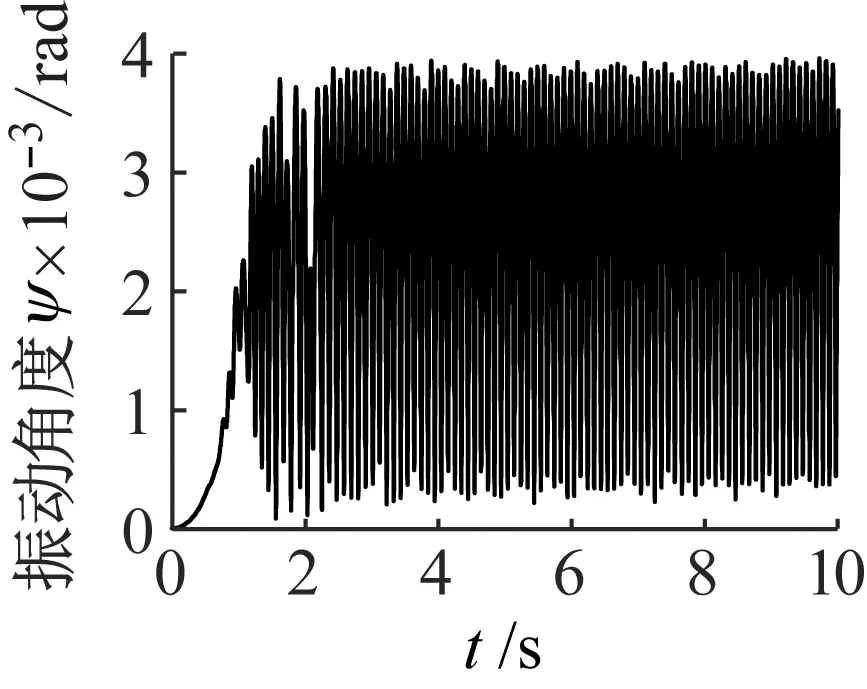
(b) 振动角度图12 Ω=30 Hz,mb=3 g时转子响应曲线Fig.12 Dynamic response of the rotor when Ω=30 Hz and mb=3 g
4 试验分析
4.1 试验装置
为验证上文理论结果,图13(a)搭建了带有跨平面球体平衡器的转子试验平台,包括弹性支承、跨平面平衡器、偏心圆盘、电机与传动部件等。弹性支承由4根刚度相同的弹簧组成,分别连接转子轴承座和底座。平衡器由外壳和平衡球组成,其中外壳采用中空的圆柱形钢化玻璃制作,两端通过端盖封闭,平衡球可沿转子轴向和圆周方向自由运动。平衡器两端设置两个偏心盘,其相位分别为φu1=0,φu2=π/2。图13(b)为测量设备,在转子左右轴承座处各设置两个加速度传感器测量振幅,同时配合高速相机观测平衡球稳态位置。
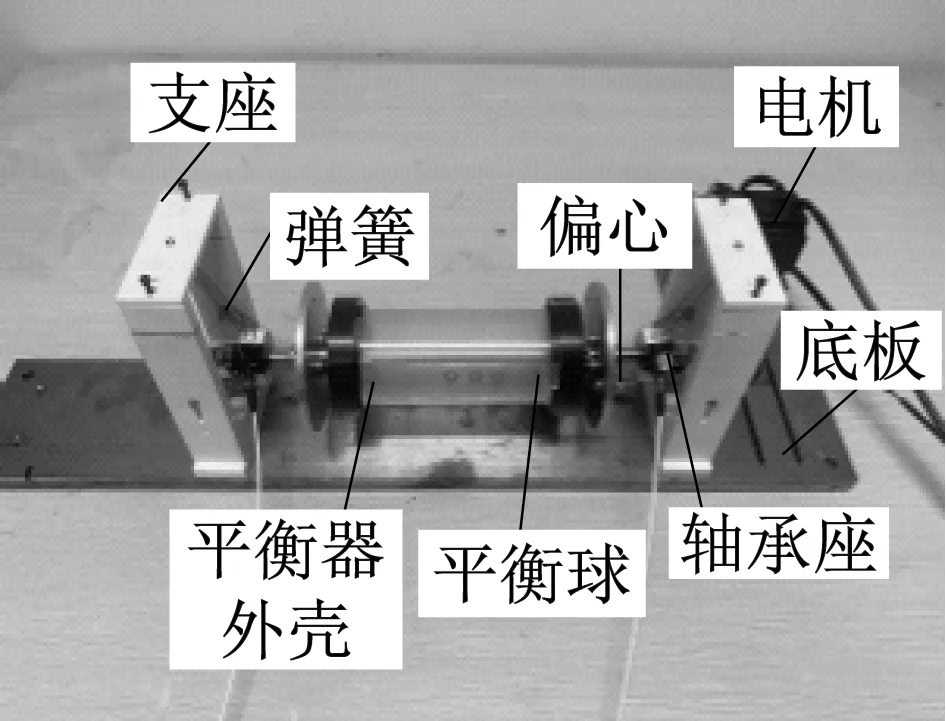
(a) 转子试验台

(b) 测量设备图13 试验装置Fig.13 Test setup
4.2 试验结果与分析
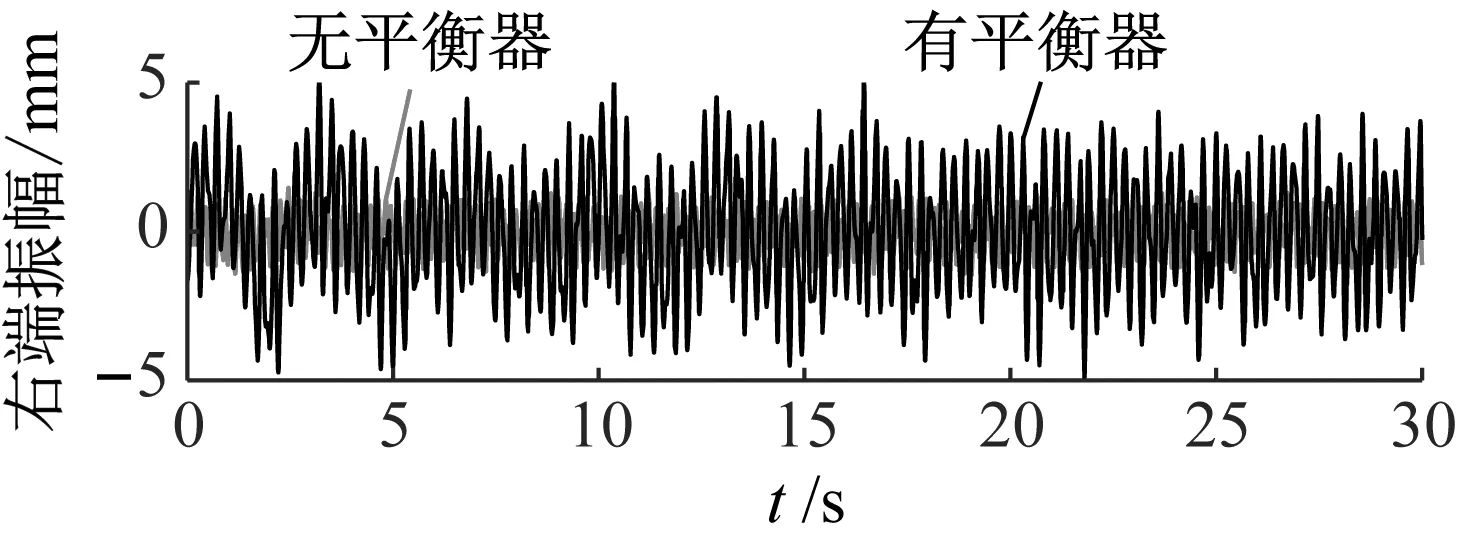
图14(a)、(b)显示了Ω=50 Hz,mb=2.5 g条件下,平衡器安装前后转子系统的动态响应情况,该条件对应图6所示的稳定区Ⅰ,可看出转子系统的稳态振幅明显减小。图14(c)为高速相机观测到的平衡球稳态位置,可见,虽然稳态阶段平衡球位置较为分散,但左侧与右侧的平衡球分别与左右两侧的偏心对向分布。由式(10)解的多样性,球体的稳态位置有无穷多种,图14(c)所示仅为其中一种。

(a) 转子左端振幅

(b) 转子右端振幅

(c) 球体稳态位置图14 Ω=50 Hz,mb=2.5 g条件下转子的响应Fig.14 Dynamic response of the rotor when Ω=50 Hz and mb=2.5 g
图15(a)、(b)给出了Ω=10 Hz,mb=2.5 g条件下转子两端的振幅曲线,该条件对应图6中的稳定区Ⅱ,从测试曲线来看,此时平衡器并未起到振动抑制作用,甚至使得转子振幅比未安装平衡器的情况下大一些。从图15(c)来看,球体并未向偏心对侧移动,甚至有些球体移动到了偏心的同侧,这会加剧转子的不平衡。

(a) 转子左端振幅

(b) 转子右端振幅

(c) 球体稳态位置图15 Ω=10 Hz,mb=2.5 g条件下转子的响应Fig.15 Dynamic response of the rotor when Ω=10 Hz and mb=2.5 g
图16给出了Ω=20 Hz,mb=2.5 g条件下转子两端的振幅曲线,该条件对应图6中的不稳定区,不难看出,此时转子两端振幅会出现周期性的波动,这本质是由球体稳态位置无法与转子同步所引起。

(a)
(b)图16 Ω=20 Hz,mb=2.5 g条件下转子的响应Fig.16 Dynamic response of the rotor when Ω=20 Hz and mb=2.5 g
综合图14~16的结果不难看出,实验结果与理论结果一致。
5 结 论
本文提出了一种同时具有轴向与周向自由度的跨平面球体平衡器,并对其动态特性进行了研究。相较于传统平面型球体平衡器,该类结构不仅可调节转子质径积,同时也可调节转子质径矩。在转子一阶临界转速到三阶临界转速之间,该类平衡器存在一定范围的不稳定区,转子动态特性设计过程中应予以避免。当转子转速高于三阶临界转速且球体质量足够大的情况下,该类平衡器具备完全平衡转子质径积与质径矩的能力。
猜你喜欢
矿山安全信息(2022年20期)2022-11-25
动力学与控制学报(2022年2期)2022-07-19
数学大王·低年级(2021年4期)2021-04-27
消费电子(2020年5期)2020-12-28
快乐语文(2018年7期)2018-05-25
池州学院学报(2017年5期)2018-01-23
哈尔滨工业大学学报(2017年5期)2017-07-05
小说月刊(2015年9期)2015-04-23
人生十六七(2015年5期)2015-02-28
