某车载火炮系统水平度测量数据分析与建议
2023-10-12 07:22:44陈明哲
火控雷达技术 2023年3期
谷 涛 陈明哲
(西安电子工程研究所 西安 710100)
0 引言
水平基准是雷达与火炮产品重要的工作基准,对其俯仰角和方位角精度有直接影响,尤其对俯仰角影响更大。独立的雷达与火炮产品水平基准标定方法已较为成熟,但集成了雷达的新型火炮武器系统因缺乏成熟的标定方法,在产品试验中常出现雷达与火炮水平基准不一致影响武器系统精度指标的问题;其原因一般可归结为火炮武器系统安装雷达时水平基准传递出现问题,即雷达在火炮武器系统上水平基准标定精度不足或方法不正确。
文献[2]对某车载火炮武器系统检飞试验中出现的“跟踪雷达俯仰测角精度超差”问题进行了分析,确定问题原因后采取措施对误差进行了补偿,并通过仿真验证了补偿方法的可行性。本文作者曾参与该武器系统跟踪雷达水平基准标定工作,通过对雷达水平度检测试验数据进行重新分析,分析结论与建议可以对解决该武器系统雷达俯仰测角精度超差提供另一种思路与解决途径。
1 武器系统布局及雷达俯仰零位水平度误差测量试验
1.1 系统结构布局
某车载火炮武器系统由火炮、雷达、火控计算机及拖车底盘等部分构成,其中雷达系统集成了光电设备,雷达与光电系统采用共伺服系统,系统结构布局如图1所示[1-2]。

图1 某武器系统结构布局示意图
武器系统作战时,雷达完成目标探测,跟踪,提供目标现在点实时高精度坐标信息;火控计算机对点坐标信息进行坐标转化,完成射击诸元解算,并控制火炮随动指向未来点,雷达伺服系统在火炮随动系统运转基础上进行复合运动;拖车底盘上安装调平装置及水平传感器用于武器系统调平,雷达跟踪天线座内部也安装了水平传感器用于对雷达方位轴回转平面水平度进行测量。
1.2 雷达俯仰零位标定
图1显示该武器系统存在火力回转轴与雷达跟踪回转轴两根回转轴线,两回转轴线理论上应保持平行即保持火力回转面与跟踪回转面平行。当武器系统调平后火力回转面与跟踪回转面均应保持水平,实际上由于调平传感器精度、基准标定误差、各部位零件制造精度等不可消除误差的影响,系统必然存在一定的水平度误差。由于水平基准雷达俯仰角的基准,武器系统水平度误差会对雷达俯仰角精度造成影响,继而影响武器系统技战术性能。
该火炮武器系统在武器系统车体调平的基础上对雷达俯仰零位进行标定。首先,以火炮安装面上调平传感器为基准对武器系统车体进行调平,要求横向与纵向传感器水平度不大于2′,即认为雷达安装面水平度满足要求;然后,在该状态下进行雷达俯仰零位的标定,一般通过经纬仪与雷达光轴对瞄方式完成俯仰零位标定。通过标定流程可以发现,车体调平水平度、火炮回转面与雷达回转面平行度、炮塔方位轴隙晃动、雷达方位轴隙晃动等多种因素均会影响雷达俯仰零位标定。
1.3 雷达俯仰零位水平度误差测量试验
该火炮武器系统在检飞试验中出现俯仰角系统误差均值达-1.5mrad,超出不大于0.8mrad的指标要求。为解决该火炮武器系统俯仰测角精度系统误差超差问题,文献[2]经过分析先后排除了传感器跟踪角误差与雷达光电轴轴系不一致两方面的原因,最终将原因确认为雷达俯仰零位与绝对水平间的误差,确认过程进行了两组试验。
1)采用经纬仪与雷达光轴对瞄方式检查雷达俯仰零位与绝对水平间的误差,在距离雷达100m以远位置架设并调平经纬仪,将火炮方位指向调整至0mil、500mil、1000mil、1500mil、2000mil、2500mil、3000mil七个雷达检飞典型位置,一般情况下经纬仪架设高度低于雷达光轴位置,用经纬仪盘左与盘右分别与雷达光轴对瞄,读取并记录雷达俯角及经纬仪仰角;将雷达仰角与经纬仪仰角数据取反后计算雷达俯仰零位与绝对水平的误差。测试数据及计算结果见表1所示。

表1 经纬仪与雷达对瞄计算误差结果[2]
2)读取雷达天线座内水平传感器数据,计算雷达俯仰零位与绝对水平间的误差,将火炮方位指向调整至0mil、500mil、1000mil、1500mil、2000mil、2500mil、3000mil七个雷达检飞典型位置,读取并记录雷达天线与火炮同向(0mil)与反向(3000mil)两位置时天线座水平传感器数据,两位置水平传感器读数差的均值即为对应火炮方位雷达俯仰零位水平误差。测试数据及计算结果见表2所示。
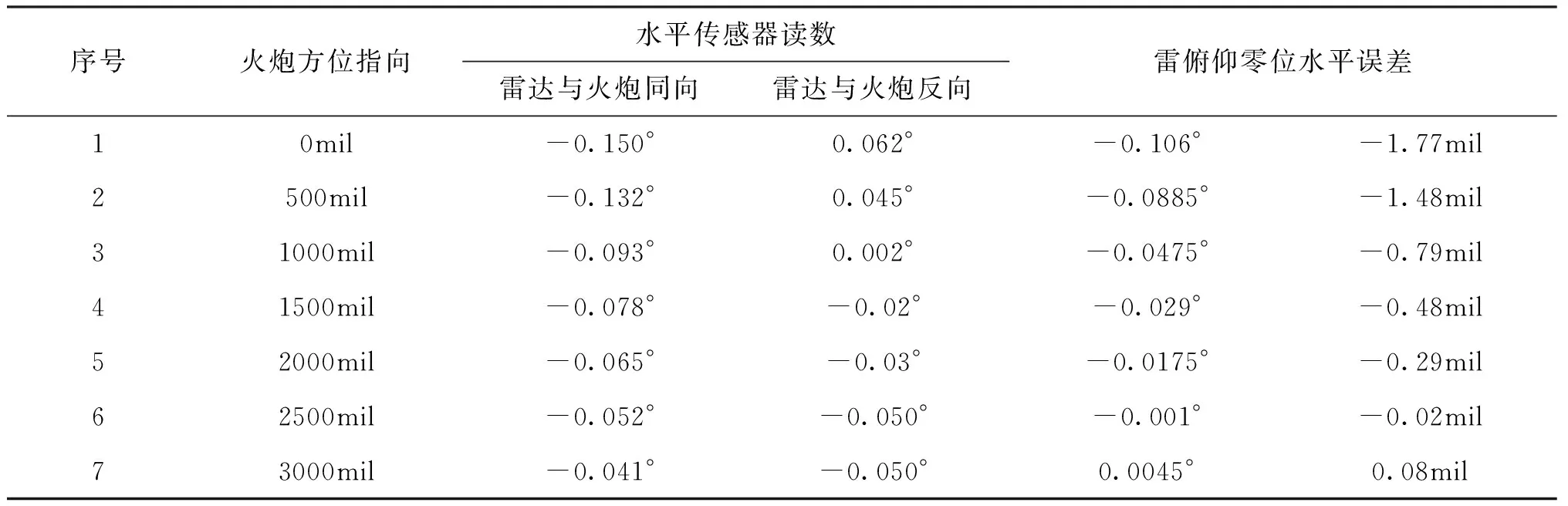
表2 雷达水平传感器数据计算误差结果[2]
文献[2]对两组试验水平误差数据进行了比对分析,比对结果如图2所示。
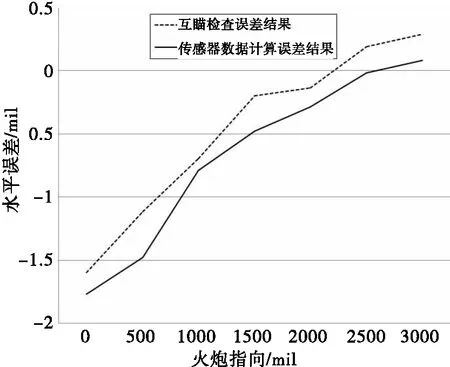
图2 两组试验计算误差比对
两组试验数据计算的雷达俯仰零位与绝对水平误差值基本一致,误差方向也一致,据此认定雷达俯仰零位与绝对水平误差是引起该火炮系统俯仰测角精度系统误差超差的主要原因,采取使用雷达天线座水平传感器两轴水平度数据修正目标空间位置的处理措施,通过仿真和后期检飞验证了措施的有效性。
文献[2]未对雷达俯仰零位与绝对水平误差超差进行更深入分析,进一步确定前端因素采取相应控制措施,而采取了使用雷达水平传感器数据修正雷达俯仰零位的措施,在批量生产阶段这会增加武器系统调试的复杂度,可能也会影响雷达或火炮俯仰基准的一致性;本文尝试对文献[2]试验数据进行重新分析,以定位引起雷达雷达俯仰零位与绝对水平误差超差的前端原因并给出具体改进建议。
2 水平度误差测量数据重新分析
2.1 水平度测量数据拟合分析方法
装备回转面不水平时,安装于回转面之上的水准器的气泡就会来回窜动;对于装备回转结构上安装的水平传感器,其两轴读数也分别按正弦规律变化;使用合像水平仪或电子水平仪测量并记录装备方位角和水平仪读数,按方位角绘制水平仪曲线即可得到调平误差曲线,该误差曲线包括了装备调平误差及方位轴隙晃动量[3]。通过对测量数据进行拟合分析,可以单独分离出调平误差,该误差服从正弦规律,通过拟合分析可以得到最大调平误差及其出现的角度,也可以得到测量面(水平仪工作面或水平传感器安装面)与回转轴的垂直度误差。
将包括方位角及各方位水平度测试数据导入Math CAD软件[4],建立正弦曲线拟合方程为
F(X)=a·sin(x.deg+b.deg)+c
(1)
调平误差正弦曲线频率一般固定置为1,该方程仍包括3个未知项,无法使用常规计算求解,使用最小二乘法进行数值求解,可达到较高的计算精度;对曲线参数进行初始赋值如a=1,b=0,c=0,再使用Mineer()函数按最小二乘条件求解正弦曲线方程参数为
(2)
其中参数a为曲线幅值,表示调平误差大小;参数b为曲线相位,最大调平误差出现在方位角b±90°位置;参数c为曲线中线位置,表示测量面与回转轴线的垂直度误差。
2.2 雷达俯仰零位水平度误差测量数据拟合分析
将表1经纬仪与雷达对瞄测试数据中的火炮方位指向单位由mil转换为(°),在Math CAD中输入方位角及俯仰零位误差数据,根据式(1)、式(2)进行调平误差正弦曲线拟合计算如下。
x=(0 30 60 90 120 150 180)
z=(-1.6 -1.12 -0.7 -0.2 -0.14 0.19 0.29)
n=lenth(x)-1i=0_n
F(X)=a·sin(x.deg+b.deg)+c
初始化变量a=1b=0c=0
Given
SSE(a,b,c)=0
根据各参数计算值绘制调平误差曲线如图3所示。
雷达与经纬仪对瞄试验时,火炮进行方位旋转,雷达相对火炮方位保持不变,得到的俯仰零位误差是通过雷达仰角与取反的经纬仪读数求差得到。去除火炮方位轴隙晃动及等微小影响,等效于通过雷达光轴以雷达俯仰角轴角编码系统作为测角传感器对火炮方位回转面水平度的测量。
通过最小二乘计算得到的曲线参数和拟合曲线可看出:
1)车载火炮系统拖车调平误差0.898mil即3.2′;系统使用前要求横向与纵向调平误差不大于2′,则两轴耦合调平误差不超过2.8′,系统调平误差超过允许值。
2)雷达俯仰零位与火炮火力回转轴垂直误差为-0.657mil。
使用相同方法对雷达水平传感器在火炮不同方位指向的读数进行分析,以表2 雷达与火炮同向数据计算得到:
根据各参数计算值绘制调平误差曲线如图4所示。
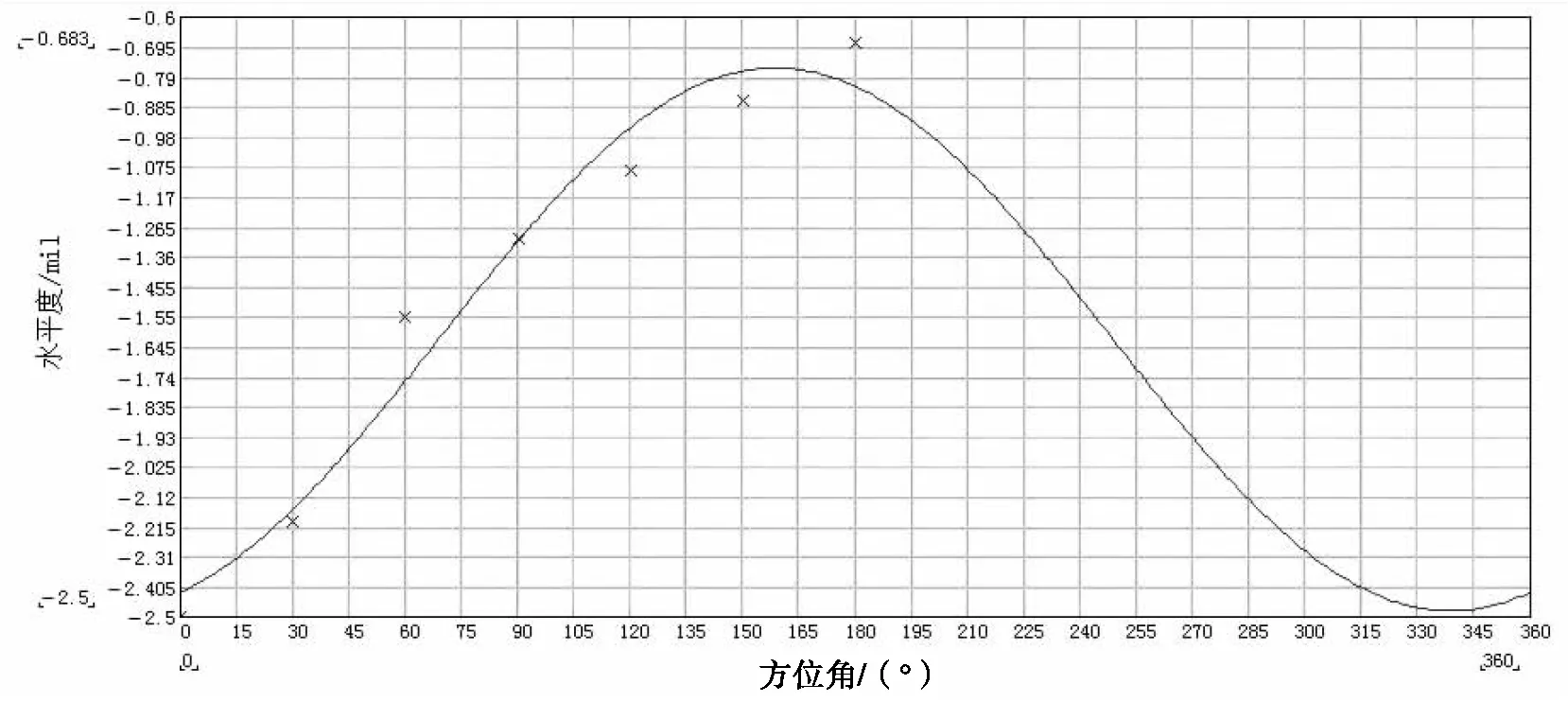
图4 雷达水平传感器(与火炮同向)读数拟合曲线
将雷达水平传感器与火炮反向数据倒序排列也可以得到几乎相同的分析计算结果与拟合曲线。
通过最小二乘计算得到的曲线参数和拟合曲线可看出:
1)分析结果显示车载火炮系统拖车调平误差0.86mil即3.1′,再次验证了该车载火炮系统调平精度超差;
2)雷达水平传感器安装面与火炮火力回转轴垂直误差为-1.621mil。
2.3 对雷达俯仰零位水平度误差测量数据分析结果的推定
根据2.2中对经纬仪与雷达对瞄误差及雷达水平传感器误差分析的结果,可以做出如下推定:
1)两组分析显示该车载火炮系统拖车调平误差分别为0.86mil及0.898mil,两组分析结果极为接近,均验证了车载火炮系统调平精度超差。
2)通过比对经纬仪与雷达对瞄及雷达水平传感器误差数据,雷达俯仰零位及雷达水平传感器安装面分别与火炮火力回转轴垂直误差数值,雷达俯仰零位及雷达水平传感器安装面平行度误差为:
Δ=(-1.621)-(-0.657)=0.964(mil)
雷达俯仰零位在雷达调试过程中一般通过将雷达调平后与经纬仪对瞄的方式进行标定,该误差值显示,在该车载火炮系统标定过程中存在雷达俯仰零位标定误差过大问题,导致雷达俯仰零位与雷达水平传感器之间产生了约1mil误差。
火炮系统拖车底盘调平精度、雷达方位回转轴与炮塔方位回转轴平行度、雷达俯仰轴角编码器测角精度、雷达光轴与电轴匹配精度、车载火炮武器系统调平装置支撑刚性等因素,均对在车载火炮系统上标定雷达俯仰零位有较大影响。其中雷达俯仰轴角编码器测角精度、雷达光轴与电轴匹配精度在雷达研制单位已进行过严格测试并验证精度,车载火炮武器系统调平装置支撑刚性一般情况下在火炮系统设计、制造完成后已基本确定。因此建议针对火炮系统拖车底盘调平精度、雷达方位回转轴与炮塔方位回转轴平行度进行控制,保证在车载火炮系统上标定雷达俯仰零位的精度。
3 建议
根据在误差数据分析基础上做的推论,给出以下具体建议:
1)对该车载火炮系统调平装置水平传感器精度进行检查验证,再次对火炮系统拖车底盘进行精确调平;
2)在雷达随方位转动部位上选择测量面(接近水平面)放置水平仪,进行以下测量与计算[5]:
① 火炮方位锁定情况下,仅转动雷达方位轴,使用水平仪间隔45°测量并记录水平度,其算数平均值为测量面与雷达方位轴垂直度误差;
② 雷达方位锁定情况下,仅转动炮塔方位轴,使用水平仪间隔45°测量并记录水平度,其算数平均值为测量面与火炮方位轴垂直度误差;
③ 若①、②两次测量无法做到规则分布测量,可记录雷达或火炮方位角及对应水平度,使用2.2方法拟合计算测量面与回转轴垂直度误差;
④ 对①、②两次测量计算得到的误差绝对值求差即为雷达方位回转轴与炮塔方位回转轴平行度误差,该误差值应小于允许值,否则可采用在炮塔上雷达安装基准面加装调整垫等方式进行调整。
3)使用经纬仪对瞄等方法在车载火炮系统上重新进行雷达俯仰零位标定。
以上措施在某自行火炮武器系统上已进行过应用验证,通过以上措施预期可减小雷达俯仰零位与绝对水平误差,保证雷达俯仰基准标定精度,在该车载火炮武器系统后期调试过程中通过检飞试验可进一步验证。
4 结束语
车载火炮武器系统总体单位对各子系统的标定是装备调试的重要环节,水平基准标定直接影响武器系统测量精度,因此要对武器系统水平基准标定予以特别重视,确保其标定精度。本文仅利用原论文中的精度验证试验数据进行了分析,根据雷达结构基本理论与标定经验给出了一些建议,为解决该车载火炮武器系统俯仰测角精度超差提供了另一种思路和解决途径。
本文对火炮回转轴与雷达回转轴关系的分析结论及给出的计算、调整方法,可以对其它车载或自行火炮武器系统中雷达分系统的装配、调试提供借鉴。受文献[2]精度验证试验测量精度、频次、测量位置分布的影响,本文测量数据分析计算精度略受影响,但不足以对所给出建议的有效性造成较大影响。
猜你喜欢
建材发展导向(2021年13期)2021-07-28 07:14:56
建材发展导向(2021年13期)2021-07-28 07:14:34
现代机械(2021年3期)2021-07-12 00:47:42
中国民间疗法(2021年5期)2021-06-09 09:21:08
橡塑技术与装备(2021年7期)2021-04-22 15:54:38
机械工程与自动化(2020年4期)2020-08-25 02:06:58
客车技术与研究(2019年5期)2019-10-24 02:22:44
森林工程(2018年4期)2018-08-04 03:23:38
航天工业管理(2017年4期)2017-05-12 01:16:35
石油化工建设(2015年4期)2015-12-01 04:17:07