机载预警雷达协同探测研究
2023-10-12 07:27:00李林源占运鹏
火控雷达技术 2023年3期
高 鑫 李林源 占运鹏 马 健
(空军工程大学 西安 710038)
0 引言
预警机是现代体系化作战的核心枢纽,具有远距离探测、战场指挥通信、敌我识别、电子对抗等一系列功能。机载预警雷达是预警机任务系统的主要传感器,凭借兆瓦级以上的超高发射功率和先进的信号处理技术,可以在数百公里以外搜索并同时探测数百个目标。但在实施大纵深全方位的预警探测中,单架预警机在雷达探测区域上存在覆盖盲区和多普勒盲区,对隐身飞机时探测效果会大打折扣,难以完成探测任务。因此,通常需要多机组合进行协同探测以实现协同补盲和对隐身目标的探测。
对机载预警雷达组合探测航线进行优化是提高协同探测性能决的关键技术。但预警机协同探测航线优化是一个复杂的过程,受预警机的航线设置、雷达性能、相互干扰、探测效能、作战态势等诸多因素的综合影响。文献[1]对预警机典型巡逻航线建立了数学模型,对典型巡逻航线下的探测效能进行了分析及评估,并根据探测性能给出了预警巡逻航线选择的建议。文献[2]研究了雷达组网反隐身的可行性,推导了隐身飞行器发现概率和飞行器距离以及雷达散射特性之间关系。文献[3]计算出了不同频率与发现隐身目标概率之间的关系。
针对预警机协同探测航线优化问题,首先对隐身飞机的RCS计算和雷达探测目标概率进行分析,建立了不同角域下目标探测概率定量分析的数学模型。在此基础上,对不同态势下的预警机探测概率进行了仿真计算。然后,通过仿真给出单预警机采用跑道型航线的探测区域示意图和串接和并立两种典型航线的探测区域示意图,基于仿真结果给出了不同战场态势下的预警机协同探测航线优化参数选择。
1 隐身目标RCS计算
雷达目标散射截面积是可以很好地反应目标电磁特性的特征量,能够作为评价飞机隐身性能最重要的指标[7]。
不同型号的隐身飞机RCS值不尽相同,而且飞机在不同角度上所呈现的RCS值也存在差异。值得注意的是,针对某一种隐身飞机而言,在某些角度范围内RCS呈现出明显的‘尖峰’特性,这为协同探测空域反隐身提供了可能。通过避开隐身目标RCS较小的方位俯仰角进行探测,使得预警机在作用范围不变的情况下实现对隐身目标的有效探测,从而达到反隐身的目的。
由于RCS的计算复杂,耦合因素多,因此采用拟合的方式进行建模并建立映射关系,对不同入射角下的隐身目标的RCS值进行,简化对隐身目标RCS的建模复杂度,同时为反映隐身目标特性的概率计算提供可行的基础。
文献[8]和文献[9]研究了某典型隐身目标在电磁仿真软件计算出的单雷达RCS曲线,但其的局限性是只考虑了目标的气动布局隐身情况,没有考虑目标的吸波涂层对RCS的影响。进一步,文献[7]提供了不同入射波角度下单站雷达截面积随频率变化的特性,但仅考虑吸波涂层时的隐身效能,其RCS下降值一般为6~9dB。表1为隐身目标在不同频段下的RCS减少量。
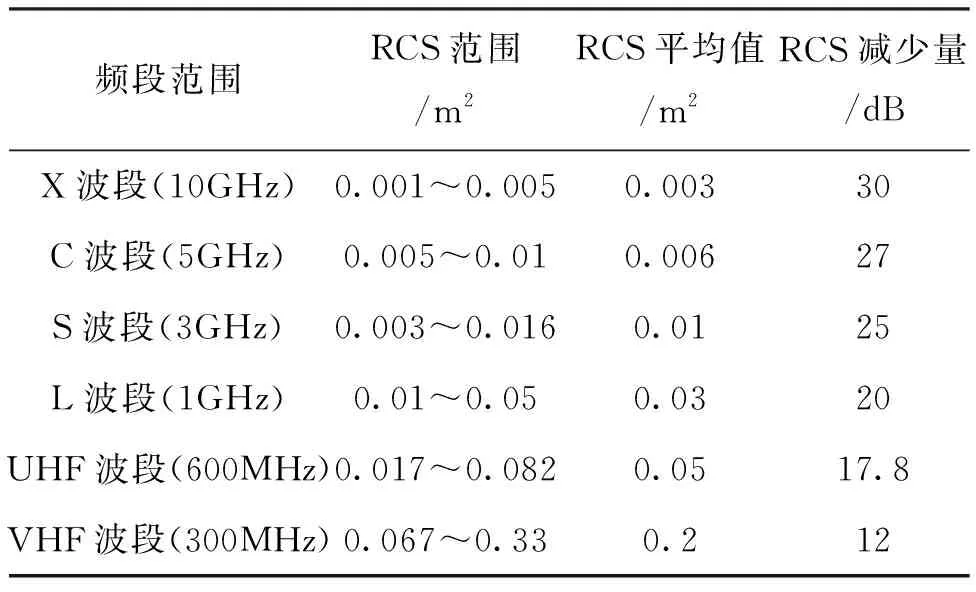
表1 隐身目标在不同频段下的RCS减少量
若隐身目标的RCS为XdB,则目标的RCS面积计算公式为[3]
(1)
其中S为隐身目标的雷达散射截面积。
1.1 基于隐身目标的RCS分频段拟合
1)当采用f=300MHz的频率探测隐身目标时,RCS简化拟合曲线为[3]
(2)
其中θ表示预警雷达与目标飞行反方向的夹角,X表示目标RCS。在同时考虑外形隐身和涂层隐身的情况下,图1为f=300MHz的雷达在简单曲线拟合后的RCS仿真曲线图。
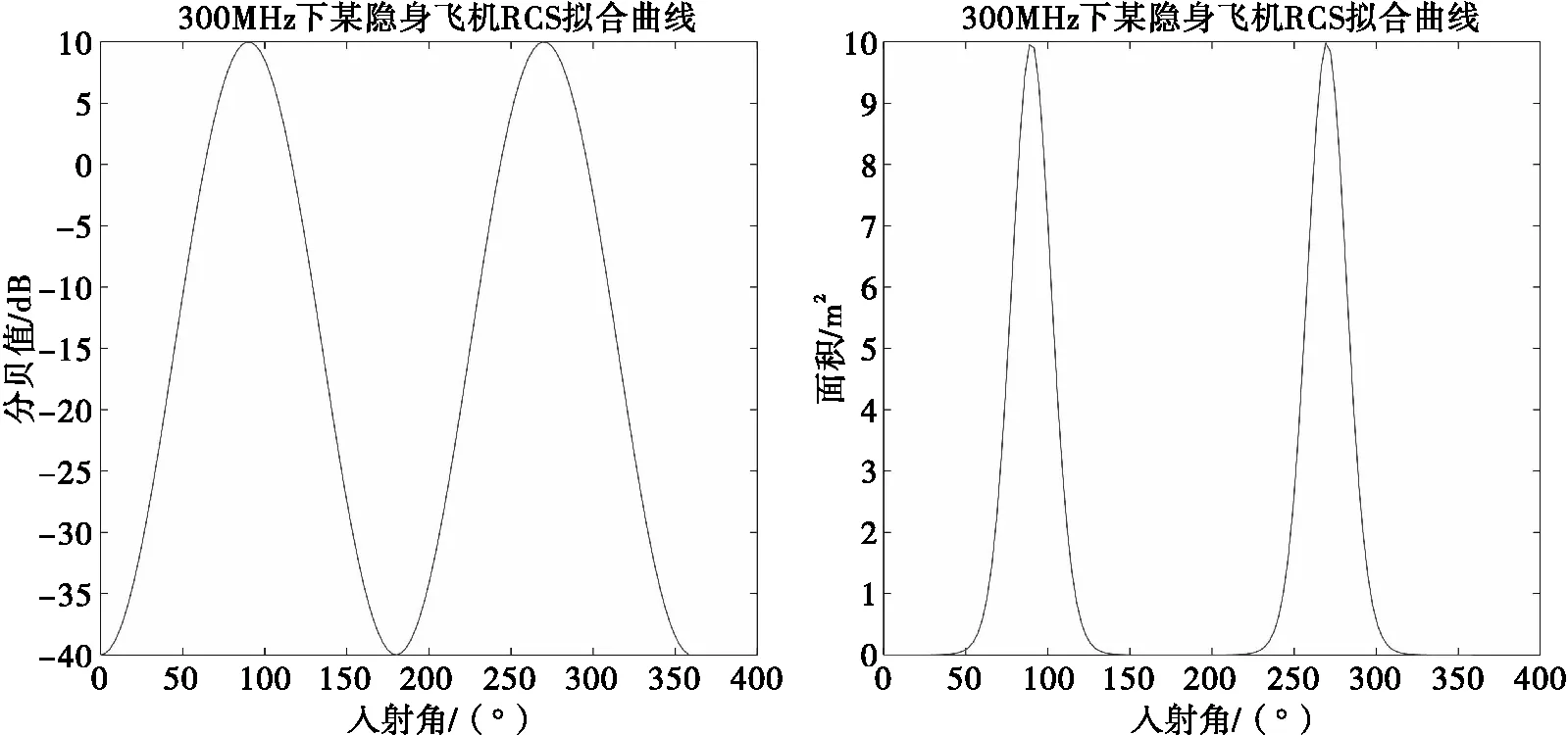
图1 雷达工作在300MHz下某隐身飞机RCS简单拟合曲线
2)当采用f=6GHz的频率探测隐身目标时,RCS简化拟合曲线为
(3)
在同时考虑外形隐身和涂层隐身的情况下,图2为f=6GHz的雷达在简单曲线拟合后的RCS仿真曲线图。

图2 雷达工作在6GHz下某隐身飞机RCS简单拟合曲线
由图1,图2可以得出结论,随着雷达波波束入射角的变化,隐身目标的RCS波动较大。而且在隐身目标迎头飞向雷达的方向入射角为和背离雷达飞去入射角为的±30°范围内,目标的RCS较小,反隐身效果较弱,但在目标的侧向RCS较大,反隐身效果较为明显,此结果能大致反映隐身目标的实际特性及其对应RCS分布值。
1.2 雷达目标探测概率
雷达探测目标的概率与雷达的探测距离和工作模式有关,雷达探测距离方程为
R4=Kσ/SNR
(4)
(5)
其中各参数参考值见表2所示。
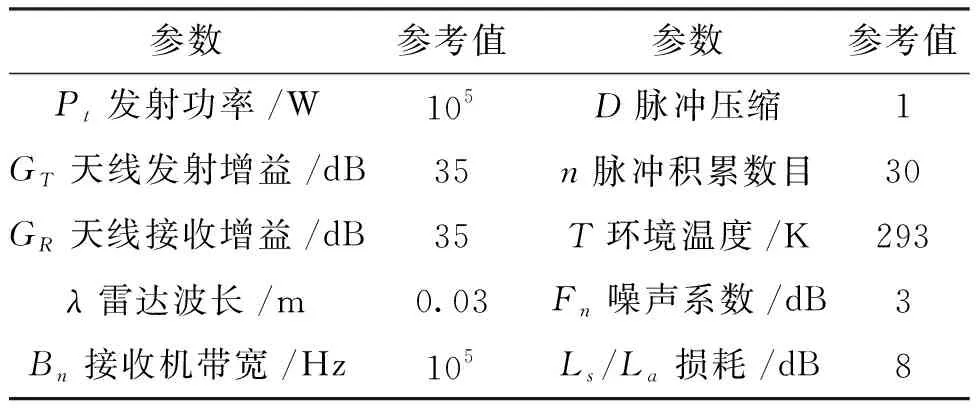
表2 公式参数参考值
由于预警机对目标的检测概率受众多因素影响,不仅与雷达自身的探测性能有关,还与目标的运动状态、RCS特性以及环境噪声等众多因素有关。为简化模型,假设预警机探测频率为6GHz且对目标的检查概率只受雷达自身探测性能和目标RCS特性有关。
假设预警机接受噪声和目标探测信号都服从瑞利分布,可推导出单架预警机在距离R处对目标的探测概率公式的近似表达式为[8]
(6)
其中:Pk是目标发现概率;S是信号功率;N是接收机噪声。
对于接收机假设两预警机的检测概率为0.5,可以得到总的检测概率Pk为[3]
(7)
其中:Pk为两预警机对隐身目标的检测概率;Rn为目标到预警机n的距离;σn为目标对预警机n的RCS;Rm为目标到预警机m的距离;σm为目标对预警机m的RCS。
对于性能已知的预警机来说,式(7)可以较为简单地表示目标到两预警机之间的距离和对于两预警机的RCS与检测概率的关系。根据目标检测概率的简化模型,则当已知隐身目标的RCS与方向角及其对应的距离关系时,即可根据模型计算其检测概率。
2 仿真原理
稳定覆盖区域的计算分为空域覆盖面积的计算、RCS对应探测概率的计算和多普勒盲区的计算[9~12]。
对于空域覆盖面积,为了便于计算,取20个采样点,我们假定机载预警雷达的探测距离为R=400km,与此同时有敌方目标以150m/s的速度向着巡逻中心点飞行。预警机的多普勒速度门限设为30m/s。建立一个1601×801的坐标系网络,每当一个坐标点被探测到时,显示红色,若未被探测到显示为蓝色,对所有结果进行累加。那么颜色最深的地方就是探测次数最多的地方,用以表征预警机对指定空域的探测覆盖空域。
对于多普勒速度盲区的计算,我们假设多普勒速度门限是30m/s,目标的运动速度为150m/s,但目标速度是朝向中心点飞行的径向速度。所以要计算多普勒速度盲区必须先计算目标相对于机载预警雷达的径向速度,然后用所得到的结果与雷达的多普勒速度门限进行比较。我们已知中心点坐标,每一时刻机载雷达的坐标和各个坐标点的坐标,我们根据三个坐标点可以构成一个三角形并且求出三条边的长度,根据余弦定理我们可以求出三个角的角度。
(8)
对于RCS对应探测概率的计算,针对单架预警机,建模时需要计算每一个探测点、采样点和航迹中心点的夹角,并根据夹角的大小求出目标RCS值,并计算在该采样点的探测概率,将20个采样点的探测概率进行加权求和,就可以得到隐身目标在该点的探测概率。针对双机协同探测,由于存在两架预警机,每一架预警机都有自己相对于隐身飞机的角度,分别计算目标的RCS和探测概率,并根据多雷达协同探测概率公式,得到每一个采样点的探测概率,将20个采样点的探测值进行加权求和,就可以得到隐身目标在该点的探测概率。
3 仿真分析
3.1 单架预警机探测能力仿真
单架预警机预警雷达探测范围示意图[7]如图3所示,探测区域近似为一个长轴为600km,短轴为400km的椭圆形,单架预警机工作时,可以稳定覆盖进行探测的区域与探测区域并不相符,只有在Rx=200km,Ry=300km这个区域内可以实现稳定覆盖探测,并且还有大量多普勒速度盲区。
图3 单预警机针对非隐身飞机探测效能图
单架预警机对于隐身飞机探测效果示意图如图4所示,探测区域类似于一个长轴为500km,短轴为350km的椭圆,但几乎不存在稳定探测区域,这是由于单架预警机针对隐身目标的探测角域较小,变化范围不足以使其RCS呈现出起伏特性。可以看出单架预警机在面对隐身飞机突防时几乎失去探测能力。
图4 单预警机针对隐身飞机探测效能图
3.2 协同探测能力仿真
两架预警机采用并立组合航线时预警雷达探测范围示意图如图5所示,探测区域近似为一个长为600km,宽为400km的矩形,采用并立组合航线工作时,并立组合航线相较与单架预警机的跑道航线覆盖面积明显增大,且探测区域就近似等于稳定覆盖区,多普勒速度盲区几乎没有。
图5 并立航线针对非隐身飞机探测效能图
双预警机并立组合航线对于隐身飞机探测效果示意图如图6所示,强效探测区主要集中在Rx=200km,Ry=200km这个范围内,在其余区域也存在少量强效探测区,但是由于面积较小且不连续,很难形成连续的航迹来判断目标态势,此时针对隐身目标在一定的区域内可以稳定探测到,但还是无法到达作战要求。
图6 并立航线针对隐身飞机探测效能图
两架预警机采用串接组合航线时预警雷达探测范围示意图如图7所示,探测区域近似为一个长为400km,宽为350km的矩形,采用串接组合航线工作时,串接组合航线相较与单架预警机的跑道航线覆盖面积明显增大,且探测区域就近似等于稳定覆盖区,多普勒速度盲区几乎没有,但是其强效覆盖区小于并立组合航线。
图7 串接航线针对非隐身飞机探测效能图
双预警机串接组合航线对于隐身飞机探测效果示意图如图8所示,强效探测区类似一个长为400km,宽为300km的矩形,强效探测区连续、稳定,且不存在多普勒盲区。即使是针对隐身飞机也有很好的探测效能,此时对目标形成连续的航迹达到稳定跟踪的目的,可以满足作战要求。
图8 串接航线针对隐身飞机探测效能图
3.3 航线选择与优化
为了满足实际作战需求,我们规定只有两架预警机参与协同探测。如图9所示,当采用并立组合航线时,强效覆盖区点数随着两航线间距增加而增加。
图9 并立航线两航线间距与探测效果关系
如图10所示,当采用串接组合航线时,强效覆盖区点数随着长直航线距离增加而几乎不变,但在长直航线距离为160km时有最佳探测效果。但是这并不意味着航线越长越好,为满足作战环境,还必须考虑到预警机间的异平台同频干扰、探测区域面积、敌我攻防态势等因素。
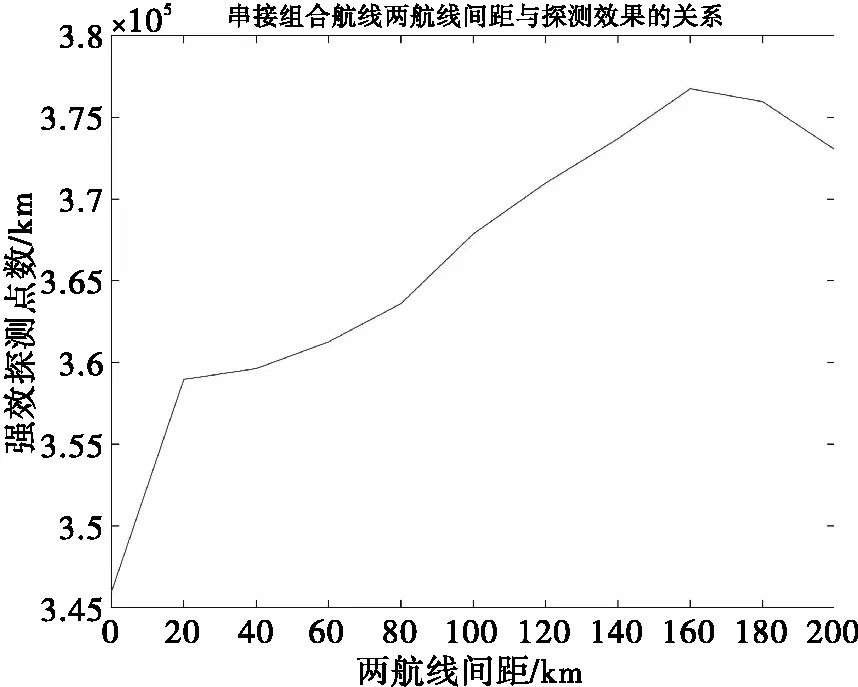
图10 串接航线长直航线距离与探测效果关系
图11中垂直轴为预警机探测区面积,总覆盖面积指预警机在整个航线过程中能够探测到的区域,强效覆盖区指预警机每时每刻都能稳定探测的区域。次要垂直轴为稳定覆盖率,即强效区面积/总覆盖面积。水平轴为航线类型。从图11中容易得出以下结论:
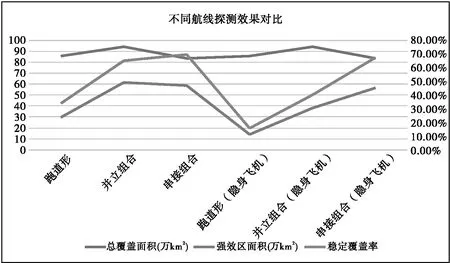
图11 不同航线探测效果对比图
1)由以上可知无论什么跑道组合模式,两架预警机的探测能力都超过一架预警机,资源足够时,应该以两架预警机协同执行任务。
2)两架预警机执行任务,同为跑道型航线串接式与并立式相比,并立式航线的总覆盖面积总是大于串接式,并立式航线的探测范围更远。面对隐身飞机时,串接组合航线的稳定覆盖率明显更高。
3)当面对非隐身飞机时,并立组合航线是更好的选择,因为它的总覆盖面积更大,有更长的预警时间,缺点是短航迹现象非常明显;当面对隐身飞机时,应该选择串接组合航线,它的强效覆盖区稳定、连续,面对隐身飞机有更强的优势,缺点是探测范围相对较小且航线固定,不够灵活。
4)在实际中,应该跟据敌方来袭飞行器的不同和作战空域不同而灵活规划航线。若是选择对固定的区域进行探测,应该选择串接式的航线,这样受到隐身飞机威胁和多普勒速度盲区的影响小一些,但是要是对探测区域有针对性的要求应该采用并立式,通过不同的航线规划可以满足不同的需求。
4 结束语
本文针对机载预警雷达组合探测航线的协同策略开展了研究,建立了雷达发现概率预测模型,然后以强效覆盖区为评判因素,给出了不同航线模式的协同探测效能和对比分析。总结如图11所示。
本文认为在没有其他情报的情况下,优先选择串接组合航线的性价比最高,它在保持较大探测区域的同时还具有最大的反隐身能力。而且串接组合航线的稳定覆盖率最高,对于预警雷达的探测资源利用率最高。
猜你喜欢
趣味(数学)(2022年4期)2022-07-02 03:10:02
小哥白尼(军事科学)(2021年5期)2021-08-30 06:46:12
小哥白尼(神奇星球)(2021年12期)2021-03-08 09:22:56
铁道通信信号(2018年12期)2019-01-31 05:36:42
资源再生(2017年4期)2017-06-15 20:28:30
太空探索(2016年5期)2016-07-12 15:17:58
太空探索(2016年6期)2016-07-10 12:09:06
中国卫生(2015年5期)2015-11-08 12:09:50
舰船科学技术(2013年12期)2013-08-15 00:51:50