基于光波导的传感驱动一体化软体康复手
2023-09-25 08:41张道辉杨青铭赵新刚
自动化与仪表 2023年9期
刘 杨,张道辉,杨青铭,赵新刚
(1.沈阳化工大学 信息工程学院,沈阳 110142;2.中国科学院 沈阳自动化研究所 机器人学国家重点实验室,沈阳 110016;3.东北大学 信息科学与工程学院,沈阳 110819)
近几年,以软体生物为参考的软体机器人技术迅速发展,基于智能软材料研发高自由度的软体机器人受到广泛关注。和传统刚性机器人相比,软体机器人具备柔软、亲和性好、仿生程度高等特点。软体手部康复机器人是穿戴式机器人新的研究方向。它广泛应用在人机交互、康复医学等领域[1-2]。机器人辅助治疗对中风患者运动功能的恢复大有裨益。
康复手的驱动方式包括电驱动、气驱动等,凭借其不同的驱动原理可以实现不同的功能。刚性康复手采用电机驱动的方式,它的优点是自带传感反馈的电机能够实现主动康复的功能,和软体手相比,它的柔顺性不够且穿戴的舒适度较差。而已有的气驱动康复手可训练动作较少,有的使用商业传感器,甚至一些康复手没有传感器,市场上现有的软体康复手,如格美公司的软体康复手没有传感技术,无法实现控制手指到达精确位置[3-4]。使用商业传感器的软体康复手普遍存在传感器灵敏度不高的问题,导致手指反馈的弯曲角度不准确,从而造成康复效果不佳。文献[5]结合Flex sensor2.2 商业传感器设计的基于气驱动柔性手部功能康复机器人,存在小角度弯曲时传感器角度变化不明显且软体手指的实际弯曲角度与预期目标值存在较大的误差的问题;文献[6]设计的基于纤维增强的软体康复手套可以产生弯曲、扭转和伸展的运动形式,但它的鲁棒性差,驱动器疲劳寿命短;文献[7-8]分别研制了一款由气动肌肉和扭簧双驱动的可以实现双向移动的手背式外骨骼机器人和一款气驱的软体材料的可穿戴式手部康复外骨骼机器人。前者四指采用一个驱动器,所以不能实现DIP 关节的屈曲、伸展和单指运动,后者可以实现手部五指的屈曲、伸展,但是每个执行器只有单自由度与手指的耦合度欠佳,没有反馈机制[9-10]。
针对上述问题,本文提出了基于光波导的传感驱动一体化软体康复手控制系统。自制的柔性光纤传感器与商业传感器相比灵敏度更高,对纹理和硬度的识别效果好,并且系统通过反馈信号能够实现闭环反馈控制。之后将软体驱动单元与柔性传感进行一体化设计与制造,开发出驱动传感一体化的软体康复手。最后,通过单指训练、对指训练和抓握训练等多种辅助训练实验,验证了软体手部康复机器人控制系统的有效性和实用性。
1 传感驱动一体化的软体康复手
柔性传感技术与软体驱动结构相结合,开发具有传感驱动一体化驱动单元的软体康复手。它防止对患者造成二次伤害。软体手部康复机器人对恢复中风患者的手部康复具有深刻意义。
1.1 柔性光纤传感器的设计与性能测试
柔性光纤传感器主要由表皮层、核心层及红外收发二极管组成,其物理结构如图1 所示。其中表皮层和核心层的材料由柔性材料制作而成,表皮层选用低折射率且不透明的硅胶材料制备(Dragon Skin 30A/B,Smooth-On Inc.),核心层选用高折射率且透明的聚氨酯材料制备(Clear Flex 30A/B,Smooth-On Inc.)。红外收发二极管的波长为940 nm,能较好地在光纤中传播光源。光敏二极管通过反向P 偏置3.3 V 电压并串联一个大电阻值为2 MΩ,可使输出电压Vout不超过3.3 V,这种反接法具有响应速度快、干扰小的特点,确保树莓派3b+上的ADC 引脚不会因电压过高而烧坏。与电阻材料或导电液体制成的传感器相比,使用的寿命更长,在压力不同时输出的信号足够稳定,主体结构皆由柔性材料制成,其拉伸性能好,通过标定及拉伸等方式都证明了柔性光纤传感器的稳定性和实用性。

图1 传感器物理结构图Fig.1 Physical structure diagram of sensor
1.2 软体传感驱动一体化设计
为保障人机交互的安全性,本文驱动器在结构上增添弹性材料以起到缓冲的作用;另一方面,通过优化控制算法和增加反馈信号的数量实现精确控制。如图2 所示,驱动器通过顺应性地嵌入传感,通过封装工艺、建模和结构优化的形式与多模态柔性传感相结合,构成了软体传感驱动一体化结构。本系统能实现对每根手指进行独立的速度和角度调节,使得整套系统更加灵活和多变,满足不同损伤等级患者的康复需求。

图2 软体驱动一体化结构实物图Fig.2 Physical diagram of integrated structure of soft drive
1.3 软体康复手套的设计与制作
本文设计研制的软体康复手机器人的整体思路是将5 个软体驱动器集成到织物手套的背侧,在经过加压后带动驱动器的屈曲和拉伸,进而带动人手指的运动。
驱动器采用一体化多腔体手指设计,Solid-Works 计算机建模软件对预设物体形状进行3D 建模,由于人手的五指长度有所差别,因此设计了2种长度尺寸壁厚均为3 mm 的软体驱动器,大、小拇指适用于92 mm 的驱动器,其余三指适用于133 mm的驱动器,经实验验证软体驱动器的长度尺寸是适用于大多数人使用的。主体材料选择Smooth-on 公司生产的Dragon Skin 30 系列铂金固化硅胶作为气动结构的制备材料。
本文选用体积大小适中、材质柔软透气、厚度轻薄的织物手套。设计制作好的软体康复手套如图3 所示,保证设计出与手部贴合度高的且弯曲灵活性良好的软体康复手。
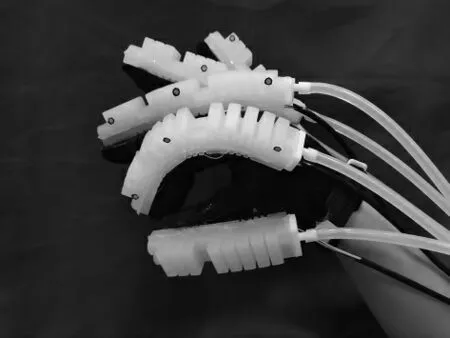
图3 软体康复手套实物图Fig.3 Soft rehabilitation gloves physical picture
2 软体康复手控制系统设计
软体康复手的变形结构采取气体驱动的方式,通过树莓派3b+控制板控制相关设备,包括控制气压的输入与反馈,从而实现软体康复手的各种运动形式;控制气泵和高速开关阀改变流体流量大小,来实现软体康复手的弯曲度和抓取力大小的改变。柔性光纤传感器基于PID 控制算法形成了闭环反馈控制。软体康复手的硬件系统实物图如图4 所示。

图4 硬件系统实物图Fig.4 Hardware system physical diagram
本系统控制原理图如图5 所示,树莓派3b+作为主控制器,输出PWM 模拟信号,将信号通过PWM-V转换器转换后可实现对气泵的启动、调速和控制高速开关阀的通断电时间。而继电器控制高速开关阀的通断,高速开关阀采用的是两位三通换向阀,具有使用寿命长、可长时间连续通电、耐冲击、耐振动等优点。使用自制的柔性光纤传感器可以实现闭环反馈控制回路。本文气驱动软体康复手的优势是将软体驱动器固定在商用手套上,患手与康复手套紧密贴合,通过控制流体的流量大小可以实现较为流畅和大角度的弯曲动作,带动人手完成类似抓握、伸掌、捏指等手势,在实际的操作过程中,舒适度较高,能够展现出较好的康复训练效果,拥有较大的使用价值和发展空间。整个硬件电路部分模块组成如表1 所示。硬件电路的控制器为RaspberryPi3b+,由于控制板无数字模拟转换模块,而气泵和高速开关阀需要DAC 扩展模块提供驱动,柔性光纤传感器反馈的模拟信号也需要DAC 扩展模块实现电路的闭环反馈控制,所以选用了树莓派高精度AD/DA 扩展版,可以提供8 路DAC 输出。

表1 硬件电路部分模块Tab.1 Hardware circuit part module

图5 控制系统原理图Fig.5 Control system schematic
3 软体康复手控制系统实验测试
本文设计了软体康复手控制系统实验测试。包括柔性光纤传感器标定试验,软体康复手单指、多指和抓握等灵活多样的康复训练实验,以及硬件系统和软件系统的实验测试,保证软体康复手系统所有功能模块的实用性、安全性和可靠性。
3.1 基于柔性光纤传感标定实验
因柔性传感器需要嵌入在驱动器内部,且要带动柔性手套进行运动,而驱动器弯曲角度受压力影响较大,输入相同压力下,单独标定驱动器和粘在手套上带动手指运动标定的弯曲角度相差较大,考虑其准确性,所以本文采用戴上手套进行标定的方法。如图6 所示,依次为五指不同角度时传感器对应的电压值。横坐标代表柔性光纤传感器的弯曲角度,纵坐标代表传感器输出电压,柔性光纤传感器的电压是3.3 V,但为了更好地观察其曲率变化此处电压做了放大处理。因不同柔性光纤传感器存在差异性,五指结构关节运动各异,所以输出电压和弯曲角度也不尽相同,对柔性光纤传感进行标定目的是为了确保软体康复手能够实现精确地控制。

图6 五指不同角度传感器对应的电压值Fig.6 Five refers to voltage value corresponding to sensor at different angles
3.2 单多指及抓握灵活多样的训练实验
根据日常生活中人手的运动习惯,设计了一些特定的训练模式,通过控制气动变化曲线并规划手指的运动顺序,从而产生这些不同的运动,如图7所示,依次为握拳、反向拉伸、对指拿捏的手势动作。不同手势动作对应的弯曲角度变化曲线如图8所示,动作1 代表握拳、动作2 代表张手、动作3 代表对指拿捏。如图9 所示,在物体抓握实验中,选取了4 种日常生活中常见的不同形状尺寸的物体,包括水瓶、苹果、签字笔和手机。

图7 不同手势动作图Fig.7 Diagram of different hand gestures

图8 不同手势动作对应的弯曲角度变化Fig.8 Variation of bending angles for different hand movements

图9 抓握实验训练图Fig.9 Experimental grip training chart
结合增量PID 控制算法分别对5 根手指进行了单独的反馈控制,实现了对手指弯曲角度更加精准的定位。压力是手指气腔内实时的压力变化,经实验测试软体康复手指能承受的最高压力值为1.5 bar,PID 代表软体康复手指的PID 控制调节曲线,角度代表的是目标角度下的实际弯曲角度。同时以食指为例,设定期望目标值从10°开始每间隔10°增加1 次角度,将实际值与目标值进行对比可以发现在输入压力相同的条件下,实际弯曲角度比目标角度低,这是由于织物手套及嵌入的传感器会对软体手指的弯曲能力造成一定的阻碍作用,但误差值在理想范围内,说明整个软体康复手套的结构设计是合理的。
4 结语
本文设计了基于光波导的传感驱动一体化软体康复手控制系统。一体化多腔室手指作为驱动器,并将软体驱动单元与柔性光纤传感器进行一体化设计与制造,采用顺应性嵌入柔性光纤传感器对软体手指的弯曲角度进行实时的反馈,并利用增量式PID控制方法实现闭环反馈控制。最后,结合所搭建的软体康复手想要实现的功能进行了实验测试,验证了软体手部康复机器人控制系统的稳定性和可靠性。在未来的工作中,会将肌电交互控制加入进来,根据患者的表面肌电数据准确识别出患者的运动意图,发挥患者的主动性进而加快患者的康复速度。
猜你喜欢
传感技术学报(2022年7期)2022-10-19
今日农业(2022年15期)2022-09-20
水道港口(2022年2期)2022-07-04
上海交通大学学报(2021年2期)2021-03-02
军事文摘(2020年24期)2020-11-29
电脑爱好者(2020年6期)2020-05-26
电子制作(2018年23期)2018-12-26
光学精密工程(2016年5期)2016-11-07
上海电机学院学报(2015年3期)2015-02-28
中国舰船研究(2014年6期)2014-05-14