
A data-driven approach for modeling and predicting the thrust force of a tunnel boring machine
2023-09-23 08:00:40LintaoWANGFengzhangZHUJieLIWeiSUN
Lintao WANG, Fengzhang ZHU, Jie LI,2, Wei SUN
Research Article
A data-driven approach for modeling and predicting the thrust force of a tunnel boring machine

1School of Mechanical Engineering, Dalian University of Technology, Dalian 116024, China2North Automatic Control Technology Institute, Taiyuan 030006, China
Thrust prediction of a tunnel boring machine (TBM) is crucial for the life span of disc cutters, cost forecasting, and its design optimization. Many factors affect the thrust of a TBM. The rock pressure on the shield, advance speed, and cutter water pressure will all have a certain impact. In addition, geological conditions and other random factors will also influence the thrust and greatly increase the difficulty of modeling it, seriously affecting the efficiency of tunnel excavation. To overcome these challenges, this paper establishes a thrust prediction model for the TBM based on the combination of on-site quality record data and surrogate model technology. Firstly, the thrust composition and influencing factors are analyzed and the thrust is modeled using a surrogate model based on field data. After main factor screening based on the Morris method, the accuracy of the surrogate model is greatly improved. The Kriging model with the highest accuracy is selected to model the thrust and predict the thrust of the unexcavated section. The results show that the thrust model has better thrust prediction by selecting similar conditions for modeling and reasonably increasing modeling samples. The thrust prediction method of TBM based on the combination of field data and surrogate model can accurately predict the dynamic thrust of the load and can also accurately estimate its statistical characteristics and effectively improve the excavation plan.
Tunnel boring machine (TBM); Thrust prediction; Surrogate model; Morris method
1 Introduction
A tunnel boring machine (TBM) is a large machine widely applied in tunnel construction, especially in hard rocks. During the tunnel boring process, the TBM needs to overcome the resistance in its axial direction to thrust forward. Generally, the total resistance in the axial direction of the TBM is termed the thrust force, which can reach as high as 23060 kN for a Φ8 m TBM. As a key tunneling parameter, the thrust force can directly influence the life span of disc cutters, the forecast cost, and the selection of the TBM. Therefore, for the design or control of the TBM, it is very important to predict the thrust according to the specific geological conditions. However, the estimation and accurate prediction of thrust are quite challenging. On the one hand, the thrust is related to many factors, such as forward speed, cutterhead speed, and rock hardness. However, in the process of thrust modeling and prediction of the TBM, there is no clear corresponding relationship between the above factors and thrust. On the other hand, in the process of tunneling, the thrust is essentially a random variable due to many uncertainties in the geological conditions and the rock stripping process. Because of these uncertainties, the difficulties of thrust force prediction for a TBM are increased and many existing thrust force models cannot be applied directly. In addition, the failure to accurately predict the thrust of TBM will seriously affect the excavation plan and efficiency of the tunnel and is not conducive to improving the excavation planning and maximizing the advance rate.
In the past decades, scholars at home and abroad have done much research on thrust prediction in shield machines (Lv et al., 2022). Shield machines of the earth pressure balance type (EPB-type), which are intended for soil or soft rock, were invented and investigated earlier than the TBM. For the thrust force () prediction of the EPB-type shield machine, Krause (1976) proposed an empirical formula=2(is the diameter of the tunneling machine, andis the empirical coefficient) by statistical analysis of engineering data from hundreds of shield tunneling machines. Due to its simplicity, the Krause empirical model can be used for preliminary load estimations. However, the estimated load based on the above methods is often very high and the range of values is too wide (Zhang Q et al., 2014). To reduce the impact of uncertainty in the empirical model of accurate thrust prediction, researchers have tried to establish an analysis model based on the analysis of the interaction mechanism between shield machine and soil. For example, Shi et al. (2011) put forward an analysis model of shield machine thrust of an EPB-type by comprehensively considering the structural parameters and geological conditions. Copur et al. (2014) investigated the stochastic characteristics of an EPB-type shield machine excavation by implementing a stochastic model in a deterministic model. Zhang Q et al. (2013) put forward a theoretical model of load prediction for an EPB-type under the working condition of soil–rock interlaced ground. In that model, the thrust is calculated by separately calculating the thrust components, and then combining them to obtain the total thrust. These models have been experimentally proved to be quite precise for thrust force estimation and prediction in soft soil.
For the load analysis of TBM in hard rock, the existing research is mainly focused on the thrust load on the disc cutter. At present, tool load models for flat and wedge tools have been developed (Li et al., 2011). In addition, a prediction model of the cutting force of the disc cutter has been developed; it is generally called the model for cutting force estimation of disc cutters (CSM) (Hassanpour et al., 2010). Barton (1999) put forward a model for predicting TBM performance by Q(TBM) methods (Q means the rock mass quality). Zhang ZH et al. (2014) proposed a new method to predict the life and abrasion of a disc cutting machine and the time for its replacement. In addition, the field penetration index (FPI) has provided a new way of predicting TBM performance (Yagiz, 2017). The relationship between the force acting on the tool and the rock properties can be obtained by using the above model. Based on the above analysis, similarly, according to the thrust prediction method of the EPB-type shield machine, the thrust prediction model and the load of the cutter of the TBM can be obtained. However, the rock cutting principle of the TBM is totally different from that of an EPB-type shield machine. The scraper of the EPB-type shield machine cuts off the soil continuously during the working process, that is, all scrapers on the cutterhead are always in contact with the soil. By contrast, the disc cutter is in discontinuous contact with the rock during the operation of the TBM. At any given moment, it is difficult to obtain the position and quantity of cutter contacting with the rock in a TBM. Hence, the thrust force of the TBM, random in nature, cannot be obtained directly via summing the load on each cutter as can be done for the EPB-type. In addition, the uncertainty of factors such as cutterhead and geological conditions also increases the difficulty of accurate prediction of the thrust. Therefore, it is necessary to deve lop a model that can accurately predict the TBM thrust.
Nowadays, machine learning (ML), especially deep learning (DL), has received extensive attention due to its successful application to solving complex engineering and mathematical problems (Iliadis et al., 2022). Rosso et al. (2023) proposed an automatic classification framework for highway tunnel issues based on convolutional neural network (CNN), which improved the efficiency of indirect measurement methods. Lin et al. (2022) proposed a hybrid model of particle swarm optimization (PSO) and long short-term memory (LSTM) neural network. Based on the above, a framework for automatic data collection and model application during tunnel excavation is developed. By collecting tunnel construction data for training and testing, the results show that the model has the best performance and can be used to process the measured data of the shield machine automatic monitoring system. By studying the coupling dynamic characteristics of the cutterhead system of TBM under multi-source uncertainty, Huo et al. (2022) established a geological uncertainty coupling model and a disc cutter uncertainty coupling model. By combining the above model with the load interval boundary, a multi-source uncertainty dynamic model of TBM was established. The results show that the dynamic model considering multi-source uncertainty can provide theoretical guidance for the design of the cutting head damping structure. In addition, recent research work has begun to incorporate prior information and uncertainties, thereby improving the generalization ability of data-driven models. Data-driven generalization ability can be significantly improved by using Bayesian neural network (BNN) (Yang et al., 2021), physical information neural network (Raissi et al., 2019), and multi-fidelity BNN (Meng et al., 2021). The above model has been widely used in solving practical engineering problems such as function approximation and solving inverse problems based on partial differential equations. Hence, ML tools provide a new way to model the TBM and predict thrust under complex conditions.
In view of the shortcomings of the above research in thrust modeling and prediction of TBM and the successful application of ML tools in complex tunnel engineering problems, this paper proposes a data-driven thrust preliminary modeling and prediction method based on probability theory. The rest of the paper is organized as follows. In Section 2, the composition of thrust of TBM is introduced and the sample data are preprocessed. By analyzing the source of the TBM thrust, the influencing factors of thrust are established. In Section 3, the surrogate model of thrust of the TBM based on different kernel functions is established based on tunnel construction data, and the accuracy of different surrogate models is compared. After screening the main influencing factors based on the Morris algorithm, the accuracy of the surrogate model is greatly improved. In Section 4, based on different excavated parts, three Kriging (KRG) models are established to predict the thrust of the unexcavated part, and are compared with the recorded site data to obtain the overall fluctuation of the prediction accuracy of the thrust agency model. The accuracy of the three thrust prediction models is discussed based on the relative error, and an algorithm for further improving the thrust prediction model is proposed. In Section 5, based on the difference between the predicted value and the actual value of thrust in different prediction models, the generalization ability of the KRG model and the subsequent improvement methods are discussed in combination with the thrust modeling process. Finally, conclusions are provided in Section 6.
2 Compositions and influential factors of thrust force
The TBM is mainly composed of a cutterhead, a main bearing, a thrust system, and a gripper mechanism. The gripper system is used during the driving process of the TBM, and acts on the side wall of the tunnel to advance it. The cutterhead of the TBM can be continuously turned and the gripper shoes are pushed on the side wall to push the machine forward in reaction. At the end of one stroke of the TBM, the rear legs of the machine are lowered, and the grippers and propulsion cylinders are retracted. When the propel cylinder retracts, the gripper assembly is repositioned for the next boring cycle. At the beginning of the next boring cycle, the gripper extends and the rear legs are raised. TBM can operate continuously according to the above process. It can be seen from the above that the tunneling process of TBM is a discontinuous periodic tunneling process.
This study takes the tunnel project in a central city of a province in China as an example. The total length of the main line of the project is 69.855 km, and the construction area is mainly valleys and hills. The above geological areas are classified according to the types of surrounding rock. Type III surrounding rock is the main surrounding rock, accounting for more than 50%. Type IV surrounding rock is a common surrounding rock, accounting for 24.9%. The excavation section is circular, and the main technical parameters of TBM are shown in Table 1.
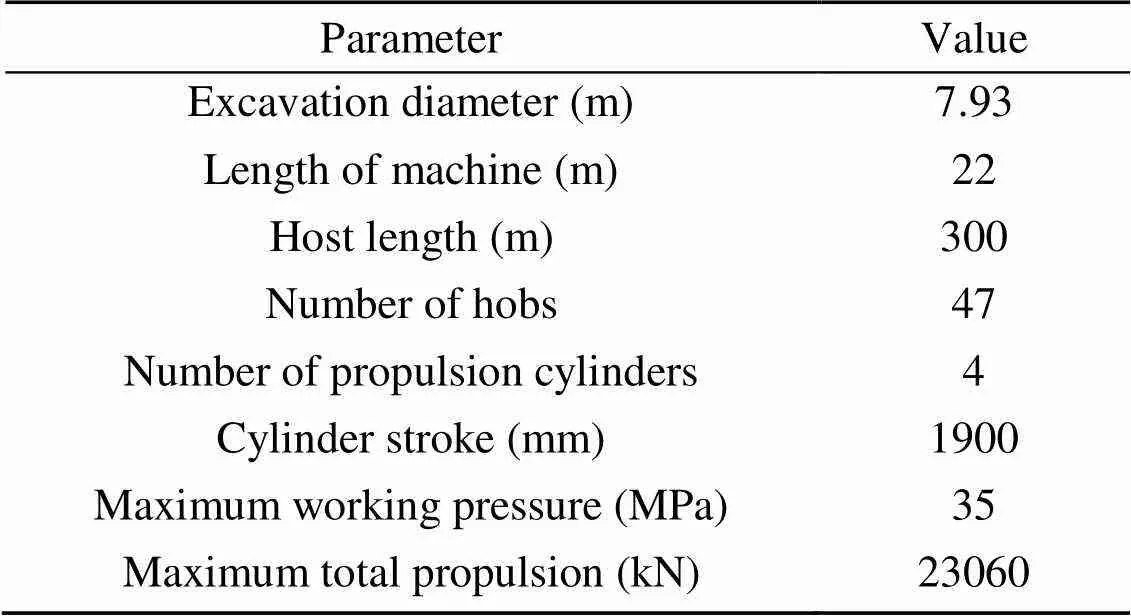
Table 1 Major technical specifications of the Φ7.93 m TBM
During the excavation process, the parameters and data related to the excavation load are recorded by sensors. The data measured and sampled on site include a large quantity of records and many parameter variables, but some of them are not very relevant to the tunneling load. Therefore, to improve efficiency and speed up the process of TBM thrust modeling, it is necessary to process the data and analyze the source of thrust. Considering the propulsion characteristics of TBM, data preprocessing is first performed. Data preprocessing can divide the excavation cycle and remove the non-working state data. In the process of TBM tunneling, the thrust force, cutterhead advance speeds, cutterhead torque, and cutterhead rotation speedcare not zero. Therefore, a binary state discriminant functioncan be established based on the above indicators and used as the basis for data preprocessing.
The thrust force of the TBM consists of three main parts, i.e., the normal force between the cutterhead and the rock F1, the frictional force on the shield F2, and the traction force of the backup device F3. The schematic description of the thrust force is shown in Fig. 1. During the tunnel excavating process, the thrust force is directly influenced by the operating and geological parameters (Zheng et al., 2016). For example, the rock pressure on the shield under different geological conditions will affect the friction force.
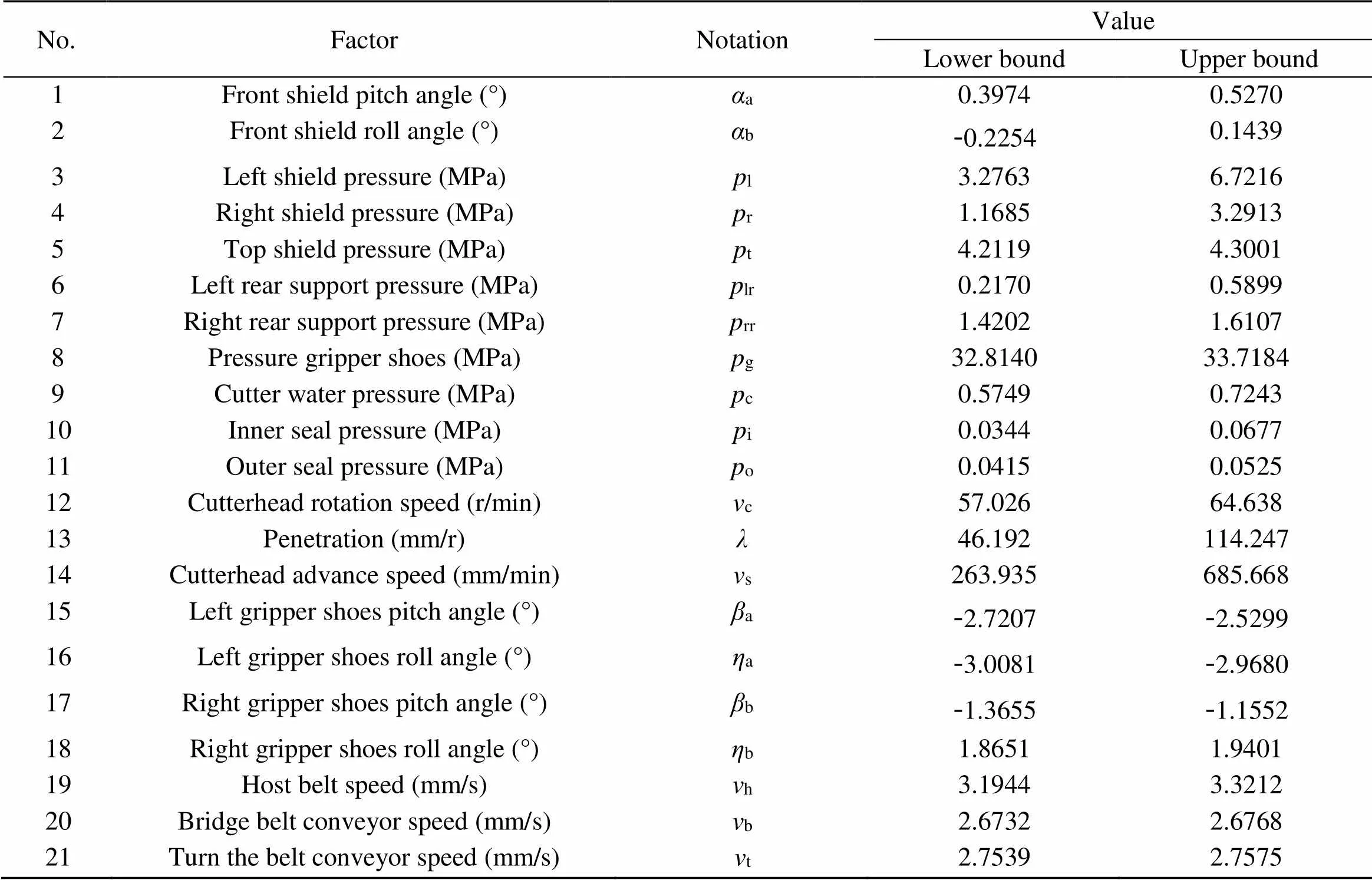
Table 2 Influential factors of the thrust force
Moreover, the normal force acting on the cutterhead will increase with an increase in the tunneling speed of the TBM. In addition, during the propulsion of the TBM, its operating attitude will affect the rock pressure on the shield and thus have a certain impact on the thrust. As shown in Table 2, through factor analysis on the source of thrust, 21 variables that may affect the thrust are selected.
3 Thrust force modeling based on surrogate models
3.1 Selecting the appropriate surrogate models

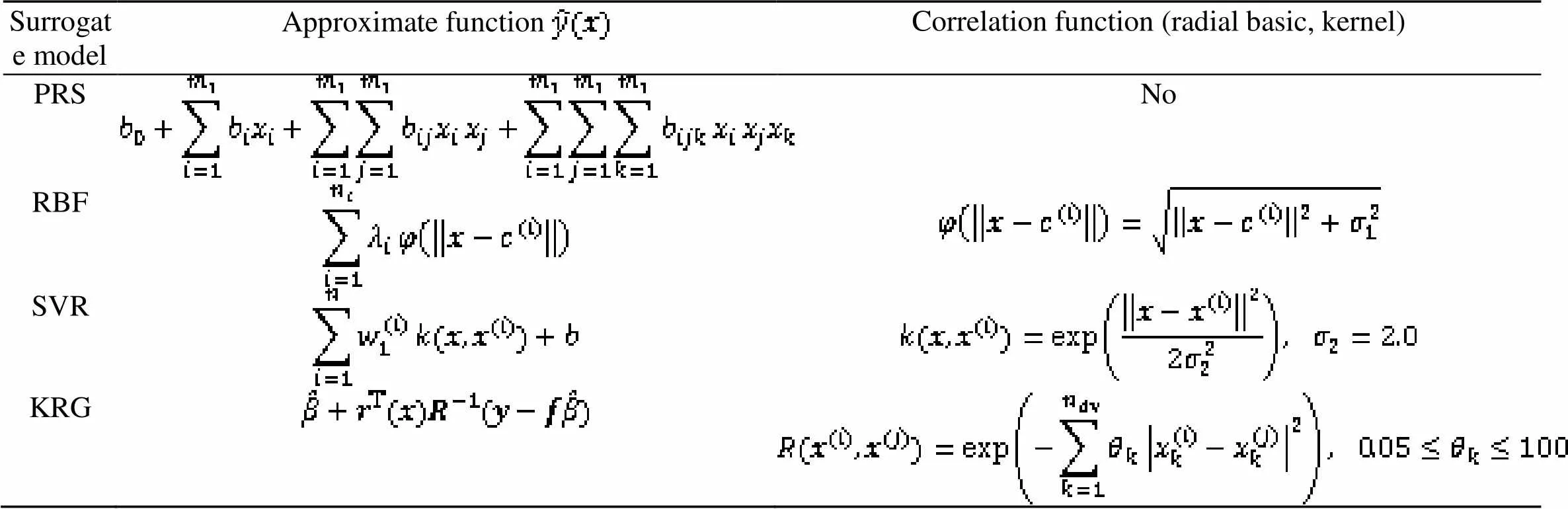
Table 3 Parameters and functions of four commonly used surrogate models
It can be seen from the second section that by analyzing the thrust source of the TBM, we have identified 21 key design variables and obtained the sample data set from the data recorded by sensors in the tunnel. Therefore, the modeling of the following surrogate model enters the parameter estimation and training stage. Here, we use the maximum likelihood estimation and cross-validation method to minimize the loss function (Sun et al., 2020).
3.1.1Maximum likelihood estimation

To simplify the calculation, the natural logarithm is negative and minimized:


3.1.2Cross-validation

3.1.3Loss function


In the process of surrogate model fitting, overfitting often occurs when the model is too flexible to some extent; the model often fits the data too finely within a certain range. Therefore, in addition to the model itself to be fitted, the noise is also fitted. Therefore, to prevent over-fitting, this study selects the model in the process of cross-validation, so as to select the optimal model.

where is the number of detection points; is the response of the detection point; is the calculation result of the surrogate model; is the average value of the response of the detection point. Additional sampling points are generated to check the error of the constructed surrogate model, where the square-error is used as an error analysis indicator. According to Eq. (6), the nearer the value of surrogate model approximates to 1, the better its fitting capacity is. As shown in Fig. 2, the precision of the proxy model between thrust and input variables based on different kernel functions is different. Based on the values of the four models, it can be seen that the RBF model has the highest accuracy (). However, the accuracy of the above four surrogate models cannot be used for accurate prediction of TBM thrust, compared with the accuracy of proxy models that can reach more than 0.9 in general. Here, the RBF model is selected as the model for qualitative analysis of the parameters in Section 3.2.
3.2 Screening out main factors with sensitivity analysis



To evaluate the elementary effect distributions of variables, the RBF model is used in analysis of the parameters, and the equation of the RBF model (Breiman, 2001) is:


Fig. 3 Estimated means and standard deviations of elementary effect distributions
3.3 Constructing surrogate models with high accuracy
In this section, based on the main influential parameters, the TBM thrust force models are built. The number of samples selected is 200 and the number of the test samples is 50. The comparison of2for the four surrogate models is shown in Fig. 4.
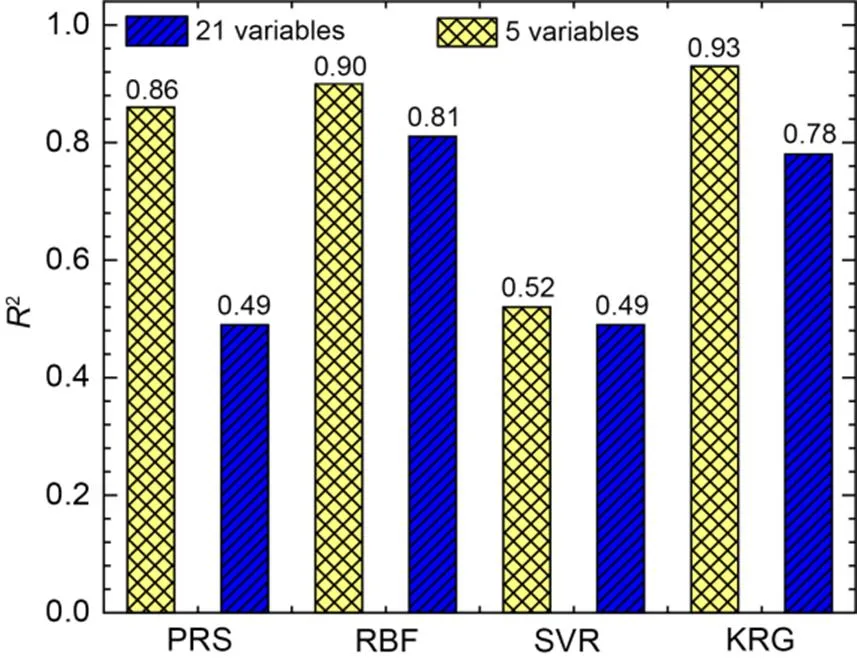
Fig. 4 Accuracy comparison of the main influential parameters for surrogate models

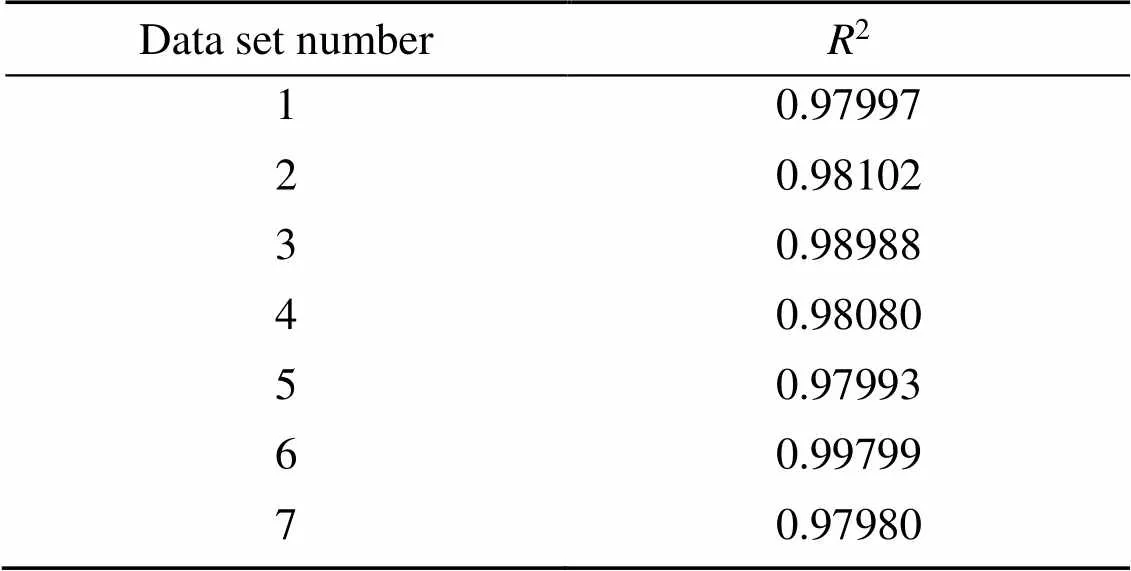
Table 4 Seven-fold cross-validation results
In general, feature selection is the step before model development. However, based on the above thrust surrogate model modeling process of TBM, this study first constructs the results of the thrust surrogate model and then performs feature selection. This is because this study first analyzes the source of TBM thrust and obtains 21 possible influencing factors, that is, the influencing factors are uncertain. The above influencing factors are used as model features and a surrogate model is constructed. The results show that the accuracy and prediction credibility of the surrogate model constructed by 21 design variables are low. Therefore, there are redundant features in the influencing factors of TBM thrust, so the Morris method is used for feature selection to further improve the accuracy of the model. The advantage of this is that all possible influencing factors in the TBM thrust modeling process are fully considered, and the subsequent feature selection further improves the prediction accuracy of the TBM.
As above mentioned, the KRG model is selected as the model of thrust and can be calculated using Eqs. (12)–(17).






4 Thrust force prediction with the KRG model
4.1 Evaluation standard on the thrust prediction

4.2 Comparison of prediction results in different modeling sections
To make the thrust prediction model of TBM applicable in the actual situation, the thrust models of different excavation positions are established in this study. The thrust models A–C of three different excavation positions are established respectively and are set up in the database. The same KRG model is used to predict the thrust of the above three thrust models of TBM in the unexcavated section. To compare the prediction accuracy of the three models, different models are used for prediction and comparison in the same excavated area. The flow chart of the above prediction method is shown in Fig. 5.
Based on the above methods, three KRG thrust models are used to predict the unexcavated part and compared with the recorded site data. In addition, the statistical analysis of the relative error is used to measure the accuracy of the prediction of the unconsolidated section. The analysis of three thrust prediction models based on different excavation positions is as follows.
4.2.1KRG model A
As shown in Fig. 6, the KRG model A is built in the excavated section A to predict the unexcavated sections A1, A2, and A3. Based on the excavated sample data, prediction model A is established using the KRG model.
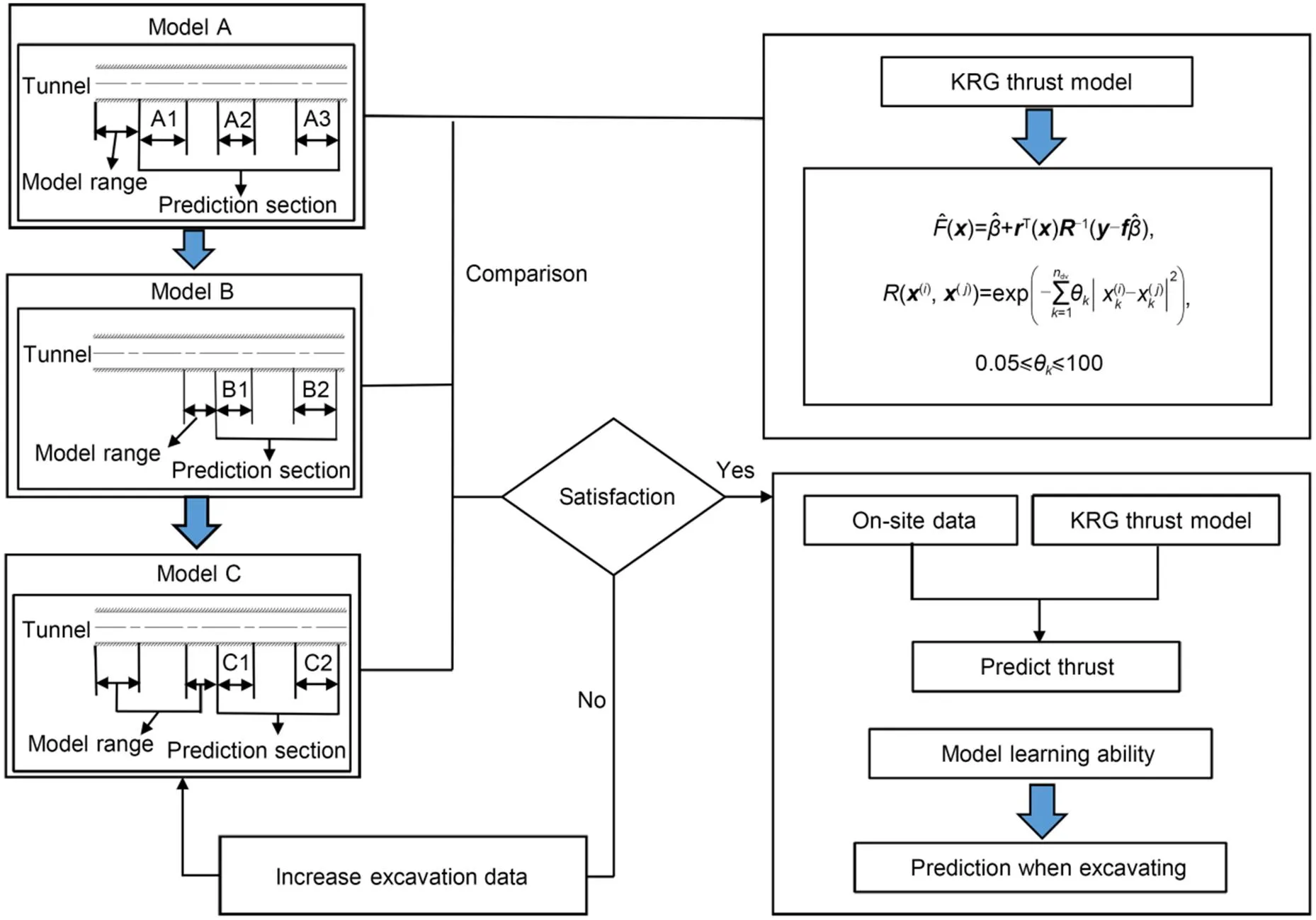
Fig. 5 Flow chart of thrust prediction comparison
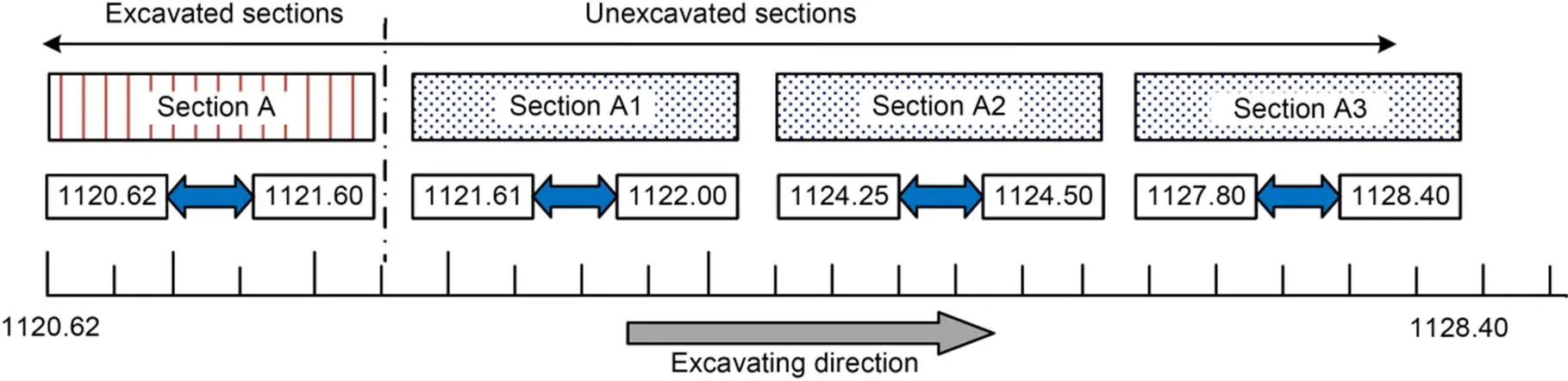
Fig. 6 Distribution map of sample data (unit: m)


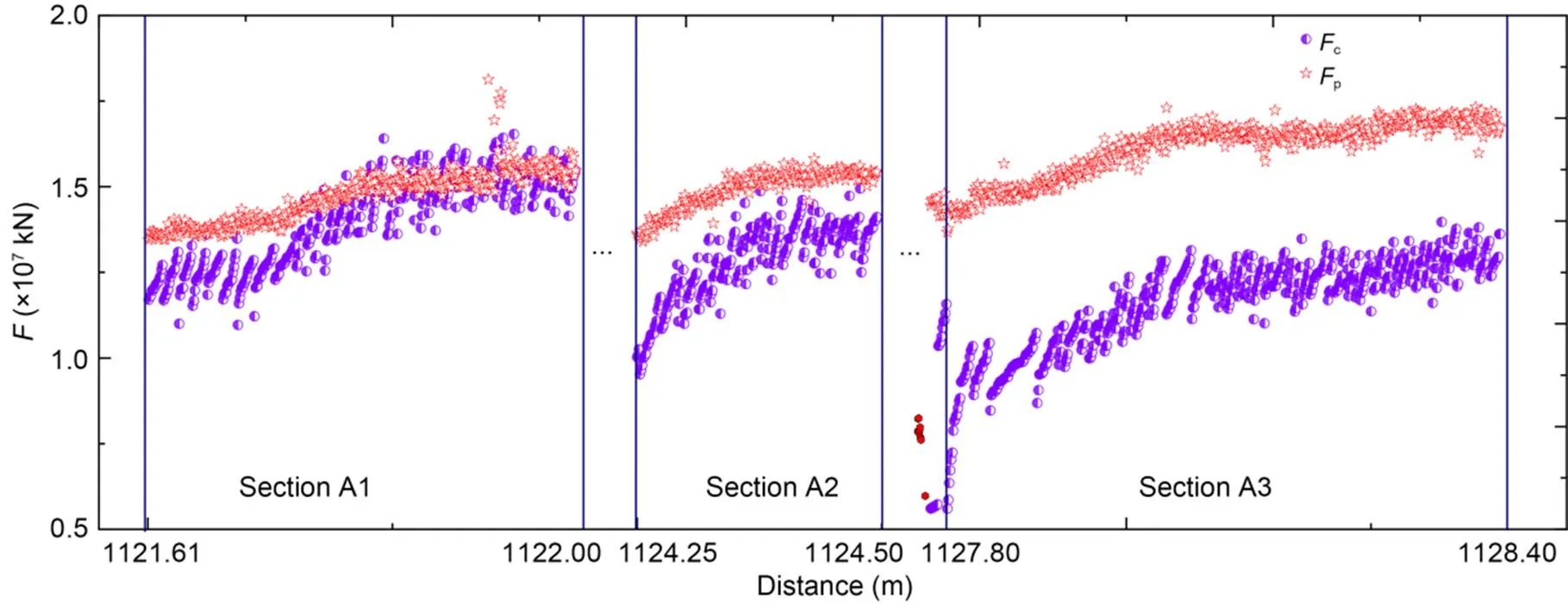
Fig. 7 Thrust prediction of unexcavated sections A1, A2, and A3 by model A
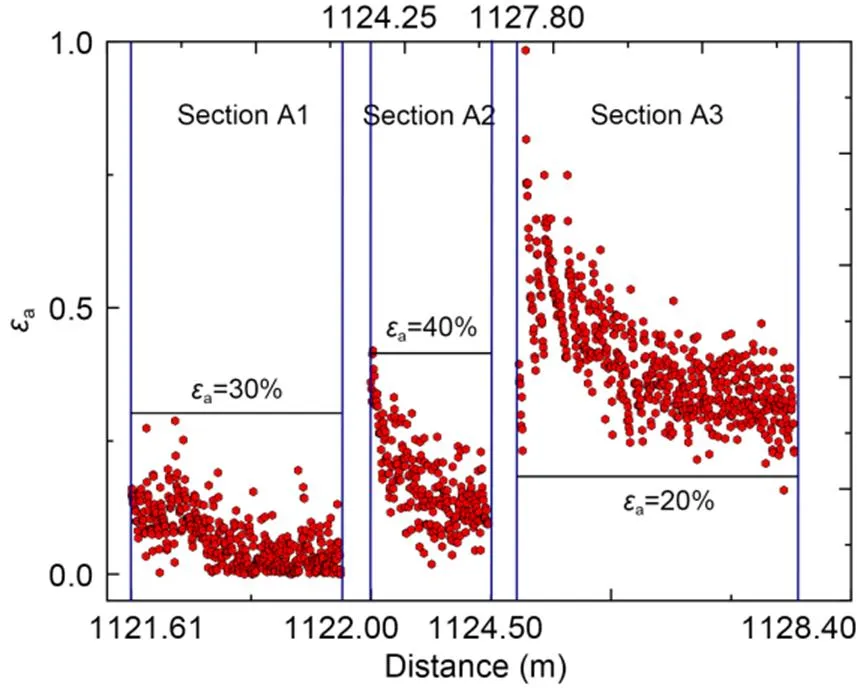
Fig. 8 Relative error of the thrust force prediction by model A
4.2.2KRG model B

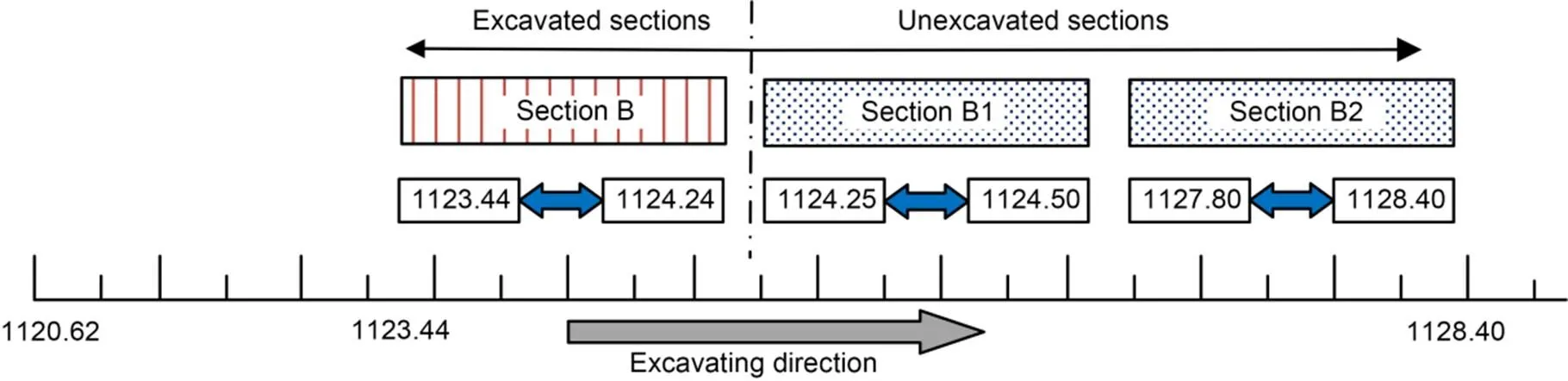
Fig. 9 Distribution diagram of sample data (unit: m)
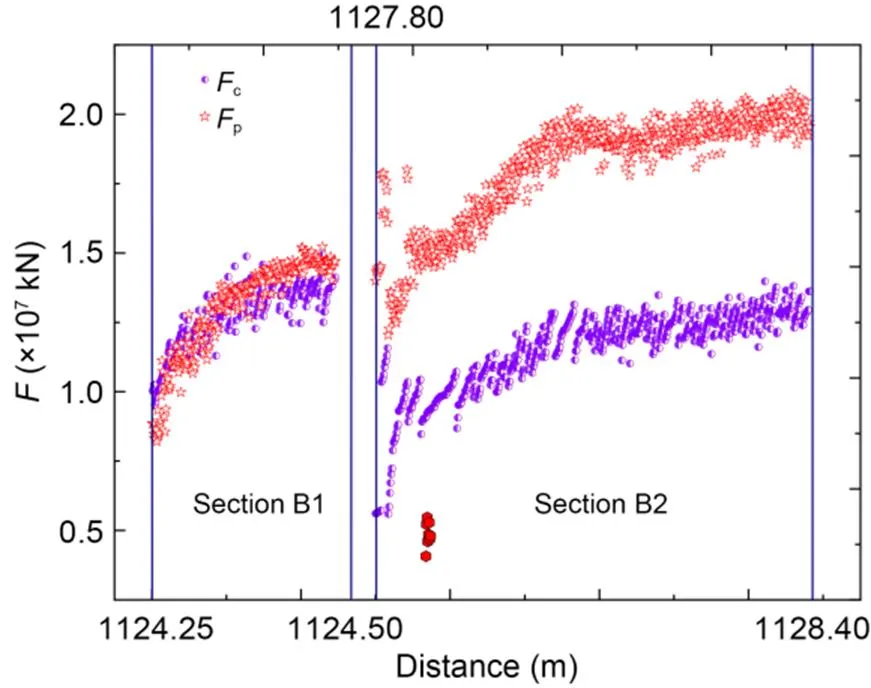
Fig. 10 Thrust prediction of unexcavated sections B1 and B2 by model B
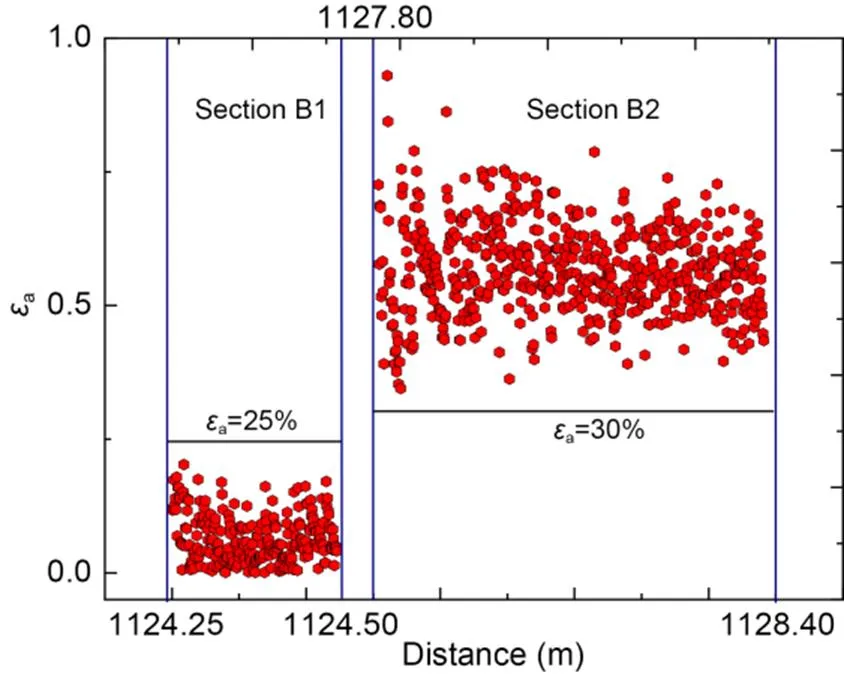
Fig. 11 Relative error of the thrust force prediction by model B
4.2.3KRG model C

Compared with models A and B, the higher prediction accuracy of model C shows that when the thrust modeling and predicted working conditions are similar, the predicted uncut section is the same, and the predicted thrust value of the TBM based on the proxy model is basically the same as the actual value. Meanwhile, it can be seen that model C has continuous learning ability and predictive ability with increasing excavated distance. As a matter of fact, the sample data of model C consist of two parts, section A and section B. Comparing the predicted values and real values of the thrust force, it is confirmed that model C has a better prediction. Therefore, the thrust model based on surrogate model provides a high precision method for better thrust prediction of a TBM.
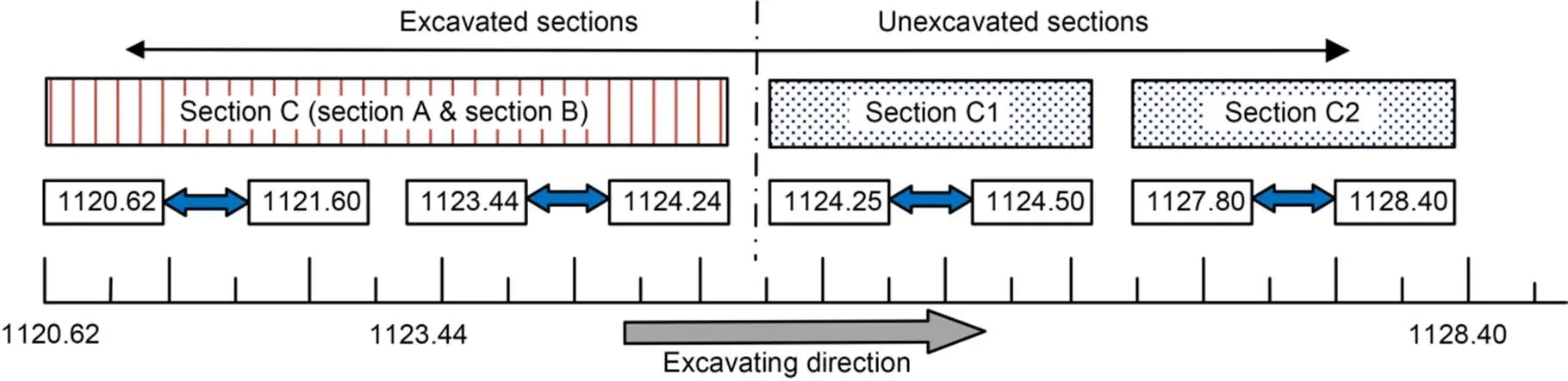
Fig. 12 Distribution diagram of sample data (unit: m)
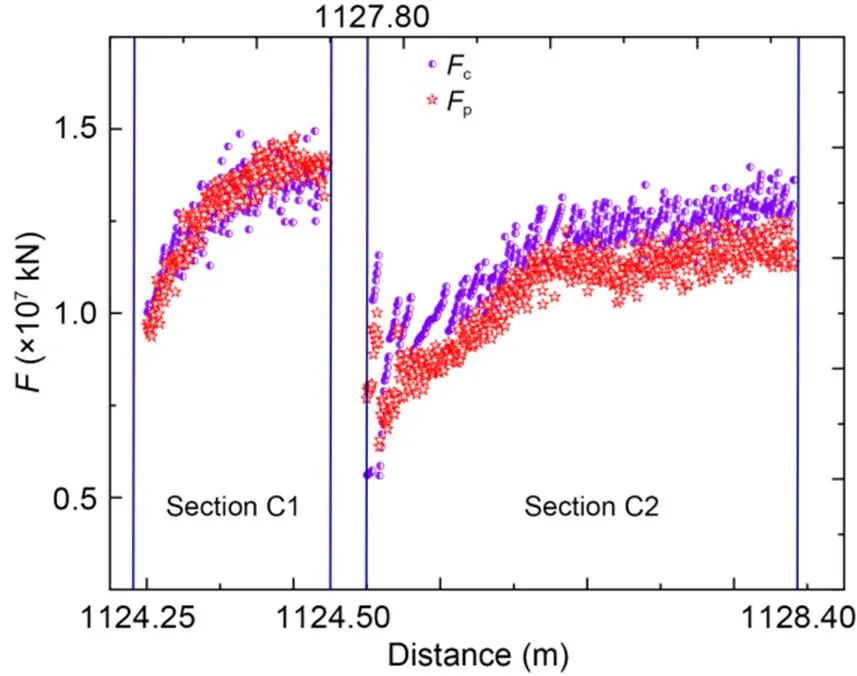
Fig. 13 Thrust prediction in unexcavated sections C1 and C2 by model C
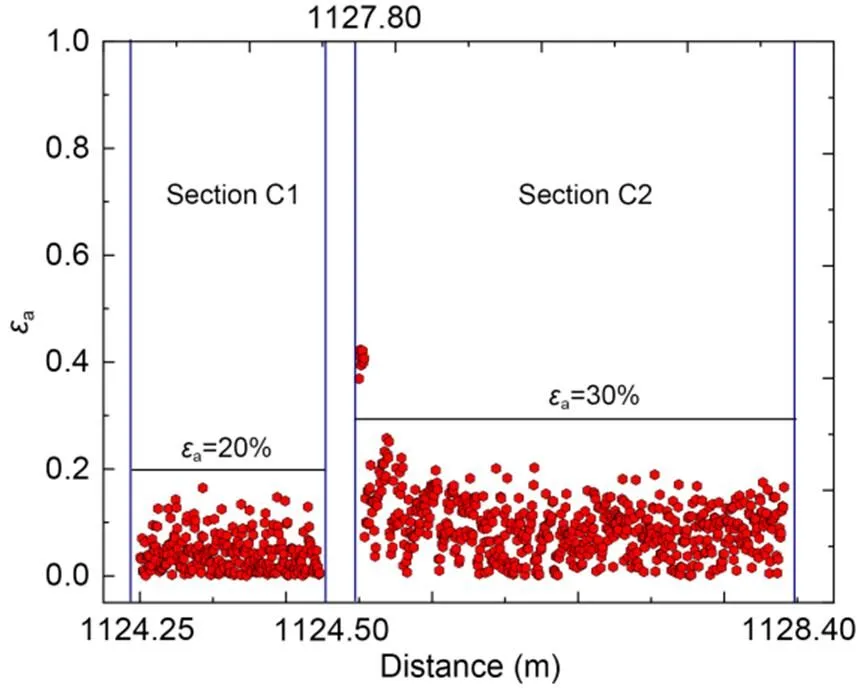
Fig. 14 Relative error of the thrust force prediction by model C
The results and analysis above demonstrate that the proposed approach can not only accurately predict the dynamic thrust force of the load but can also precisely estimate its statistical characteristics, which is of great help for the design and analysis of TBMs. In addition, numerous post-hoc analyses can be performed based on the prediction model. For instance, researchers can use global sensitivity analysis to understand how the operation parameters interact with each other or to locate the key operation parameters under different working conditions. Besides, the performance prediction results can improve excavation planning. For example, researchers can maximize the advance rate based on the performance prediction model in this paper. In addition, the proposed approach can construct a prediction model based on different engineering data (Sun et al., 2018).
5 Discussion
In addition, when the above three models are predicted in farther sections, the predicted value of TBM thrust is not the same as the real value. In model A and model B, the thrust prediction value will be greater than the actual value in most cases. Compared with models A and B, the prediction error of model C is effectively reduced. However, when model C predicts the thrust in the farther section, we find that the predicted thrust is often smaller than the actual value. On the one hand, because the process of TBM thrust prediction is inherently random, the problem that the predicted value is different from the actual value occurs. The thrust is not only affected by the factors of the shield machine itself (e.g. the tunneling speed, the rock pressure of the shield machine, and the water pressure of the cutterhead), but also by the geological conditions and the rock stripping process. In addition, the sensor will also be disturbed by noise in the process of recording data, which will cause some errors in the monitoring of the true value of thrust. On the other hand, the generalization ability of the KRG model is limited. With the increase of prediction distance, the continuous addition of noise factors will have a certain impact on the overall performance of the prediction model. That is, there will be a certain deviation between the predicted value and the actual value of the thrust, and the predicted value will be smaller or larger than the actual value.
In the process of factor screening using the Morris method, it can be found that the tunneling speed is the most important factor affecting the mean value of thrust prediction. In the process of thrust modeling, the change of tunneling speed often leads to a difference between the predicted value and the actual value of TBM thrust. Therefore, in the process of practical application, when there is a big gap between the predicted value and the actual value monitored by the sensor, the TBM parameters such as tunneling speed should be adjusted in time.
Compared with the limited generalization ability of the KRG model, various neural network models incorporate uncertainty and previous information into data-driven models, which can significantly improve the generalization ability of prediction models (Zhang et al., 2022b). Therefore, future research work will focus on improving the generalization ability of the TBM thrust prediction model. In addition, software development and user guide interface can significantly improve the applicability of the data-driven model, thus enhancing the application of TBM thrust prediction model in engineering practice (Zhang et al., 2022a).
6 Conclusions
In this paper, a new method of modeling and predicting thrust force for the mass on-site data is proposed, which integrates operation parameter analysis and thrust prediction analysis. Based on the work in this study, the following conclusions can be drawn.
To establish the thrust prediction model of the TBM, the composition and influencing factors of TBM thrust are analyzed. To overcome the difficulty of thrust modeling of the TBM, a surrogate model is used to train engineering sample data to obtain the corresponding relationship between thrust and its influencing factors. After using the Morris method to screen the main factors, the accuracy of the surrogate model is greatly improved. The TBM thrust prediction model based on the KRG model shows that the error between the predicted thrust value and the actual value is small when the number of training samples is increased and the working conditions of thrust modeling and prediction are the same. Therefore, thrust modeling based on a data-driven surrogate model can be used as the theoretical basis for thrust determination in TBM forward excavation construction control. It may also offer new research concepts for mass measured data analysis and modeling of complex engineering equipment characterized by nonlinearity and multiple influencing factors.
Acknowledgments
This work is supported by the National Natural Science Foundation of China (No. 5217052098) and the National Key Research and Development Program of China (No. 2020YFB2007203).
Author contributions
Lintao WANG conducted the modeling and theoretical derivation of the approximate model and trained the sample of the approximate model. Jie LI analyzed the thrust composition and influencing factors of TBM and modeled the thrust of TBM by using agent model technology based on field data. Fengzhang ZHU improved the accuracy of the surrogate model greatly after the principal factor screening based on the Morris method, and wrote the first draft of the paper. Wei SUN revised and edited the final version.
Conflict of interest
Lintao WANG, Fengzhang ZHU, Jie LI, and Wei SUN declare that they have no conflict of interest.
Barton NR, 1999. TBM performance estimation in rock using Q(TBM)., 31(9):30-34.
Breiman L, 2001. Random forests., 45(1):5-32. https://doi.org/10.1023/A:1010933404324
Buhmann MD, 2000. Radial basis functions., 9:1-38. https://doi.org/10.1017/S0962492900000015
Copur H, Aydin H, Bilgin N, et al., 2014. Predicting performance of EPB TBMs by using a stochastic model implemented into a deterministic model., 42:1-14. https://doi.org/10.1016/j.tust.2014.01.006
Gutmann HM, 2001. A radial basis function method for global optimization., 19:201-227. https://doi.org/10.1023/A:1011255519438
Hassanpour J, Rostami J, Khamehchiyan M, et al., 2010. TBM performance analysis in pyroclastic rocks: a case history of Karaj water conveyance tunnel., 43(4):427-445. https://doi.org/10.1007/s00603-009-0060-2
Huo JZ, Zhang HD, Xu ZH, et al., 2022. Coupling dynamic characteristics of tunnel boring machine cutterhead system with multi-source uncertainties., 137:106180. https://doi.org/10.1016/j.engfailanal.2022.106180
Iliadis L, Jayne C, Tefas A, et al., 2022. Engineering Applications of Neural Networks. Springer, Cham, Germany. https://doi.org/10.1007/978-3-031-08223-8
Jean WH, Sutikno P, Fan SZ, et al., 2022. Comparison of deep learning algorithms in predicting expert assessments of pain scores during surgical operations using analgesia nociception index., 22(15):5496. https://doi.org/10.3390/s22155496
Krause H, 1976. Geologische erfahrungen beim einsatz von tunnelvortriebsmaschinen in Baden-Württemberg.: für Geomechanik ÖG (Ed.), Neue Erkenntnisse im Hohlraumbau—Fundierungen im Fels/Latest Findings in the Construction of Underground Excavations—Rock Foundations. Springer, Vienna, Austria, p.49-60 (in German). https://doi.org/10.1007/978-3-7091-8452-3_3
Li WJ, Zeng QL, Yin L, et al., 2011. Analysis on force model of wedge-shaped milling cutters and influence laws., 39(10):112-117 (in Chinese).https://doi.org/10.16816/j.cnki.ksjx.2011.10.029
Lin SS, Zhang N, Zhou AN, et al., 2022. Time-series prediction of shield movement performance during tunneling based on hybrid model., 119:104245. https://doi.org/10.1016/j.tust.2021.104245
Lv F, Yu J, Zhang J, et al., 2022. A novel stacking-based ensemble learning model for drilling efficiency prediction in earth-rock excavation., 23(12):1027-1046.https://doi.org/10.1631/jzus.A2200297
Masi F, Stefanou I, Vannucci P, et al., 2021. Thermodynamics-based artificial neural networks for constitutive modeling., 147:104277. https://doi.org/10.1016/j.jmps.2020.104277
Meng XH, Babaee H, Karniadakis GE, 2021. Multi-fidelity Bayesian neural networks: algorithms and applications., 438:110361. https://doi.org/10.1016/j.jcp.2021.110361
Morris MD, 1991. Factorial sampling plans for preliminary computational experiments., 33(2):161-174.https://doi.org/10.2307/1269043
Mullur AA, Messac A, 2006. Metamodeling using extended radial basis functions: a comparative approach., 21(3):203-217. https://doi.org/10.1007/s00366-005-0005-7
Myers RH, Montgomery DC, Anderson-Cook CM, 2016. Response Surface Methodology: Process and Product Optimization Using Designed Experiments. 4th Edition. John Wiley & Sons, Hoboken, USA.
Raissi M, Perdikaris P, Karniadakis GE, 2019. Physics-informed neural networks: a deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations., 378:686-707. https://doi.org/10.1016/j.jcp.2018.10.045
Regis RG, Shoemaker CA, 2005. Constrained global optimization of expensive black box functions using radial basis functions., 31(1):153-171.https://doi.org/10.1007/s10898-004-0570-0
Rosso MM, Marasco G, Aiello S, et al., 2023. Convolutional networks and transformers for intelligent road tunnel investigations., 275:106918. https://doi.org/10.1016/j.compstruc.2022.106918
Sacks J, Welch WJ, Mitchell TJ, et al., 1989. Design and analysis of computer experiments., 4(4):409-423. https://doi.org/10.1214/ss/1177012413
Saltelli A, Tarantola S, Campolongo F, et al., 2004. Sensitivity Analysis in Practice: a Guide to Assessing Scientific Models. Wiley, Hoboken, USA.
Shi H, Yang HY, Gong GF, et al., 2011. Determination of the cutterhead torque for EPB shield tunneling machine., 20(8):1087-1095. https://doi.org/10.1016/j.autcon.2011.04.010
Sun W, Shi ML, Zhang C, et al., 2018. Dynamic load prediction of tunnel boring machine (TBM) based on heterogeneous in-situ data., 92:23-34. https://doi.org/10.1016/j.autcon.2018.03.030
Sun W, Peng X, Dou J, et al., 2020. Surrogate-based weight reduction optimization of forearm of bucket-wheel stacker reclaimer., 61(3):1287-1301. https://doi.org/10.1007/s00158-019-02415-3
Tao Z, Tan XD, Han T, et al., 2010. Reconstruction of normal speech from whispered speech based on RBF neural network. Proceedings of the 3rd International Symposium on Intelligent Information Technology and Security Informatics, p.374-377. https://doi.org/10.1109/IITSI.2010.118
Williamson RC, Smola AJ, Scholkopf B, 2001. Generalization performance of regularization networks and support vector machines via entropy numbers of compact operators., 47(6):2516-2532. https://doi.org/10.1109/18.945262
Yagiz S, 2017. New equations for predicting the field penetration index of tunnel boring machines in fractured rock mass., 10(2):33. https://doi.org/10.1007/s12517-016-2811-1
Yang L, Meng XH, Karniadakis GE, 2021. B-PINNs: Bayesian physics-informed neural networks for forward and inverse PDE problems with noisy data., 425:109913. https://doi.org/10.1016/j.jcp.2020.109913
Yuan XF, Wang YN, Sun W, et al., 2010. RBF networks-based adaptive inverse model control system for electronic throttle., 18(3):750-756. https://doi.org/10.1109/TCST.2009.2026397
Zhang P, Yin ZY, Jin YF, 2022a. Machine learning-based modelling of soil properties for geotechnical design: review, tool development and comparison., 29(2):1229-1245. https://doi.org/10.1007/s11831-021-09615-5
Zhang P, Yin ZY, Jin YF, et al., 2022b. Physics-informed multifidelity residual neural networks for hydromechanical modeling of granular soils and foundation considering internal erosion., 148(4):04022015. https://doi.org/10.1061/(ASCE)EM.1943-7889.0002094
Zhang Q, Huang T, Huang GY, et al., 2013. Theoretical model for loads prediction on shield tunneling machine with consideration of soil-rock interbedded ground., 56(9):2259-2267. https://doi.org/10.1007/s11431-013-5302-6
Zhang Q, Qu CY, Cai ZX, et al., 2014. Modeling of the thrust and torque acting on shield machines during tunneling., 40:60-67. https://doi.org/10.1016/j.autcon.2013.12.008
Zhang ZH, Meng L, Sun F, 2014. Wear analysis of disc cutters of full face rock tunnel boring machine., 27(6):1294-1300. https://doi.org/10.3901/CJME.2014.0905.145
Zheng YL, Zhang QB, Zhao J, 2016. Challenges and opportunities of using tunnel boring machines in mining., 57:287-299. https://doi.org/10.1016/j.tust.2016.01.023
https://doi.org/10.1631/jzus.A2200516
Revision accepted Feb. 26, 2023;
Crosschecked Aug. 2, 2023
© Zhejiang University Press 2023
Oct. 28, 2022;
 Journal of Zhejiang University-Science A(Applied Physics & Engineering)2023年9期
Journal of Zhejiang University-Science A(Applied Physics & Engineering)2023年9期
- Journal of Zhejiang University-Science A(Applied Physics & Engineering)的其它文章
- Noise robustness of an operational modal-based structural damage-detection scheme using impact-synchronous modal analysis
- Bifurcation control of solid angle car-following model through a time-delay feedback method
- Molecular force mechanism of hydrodynamics in clay nanopores
- Theoretical and experimental investigation on the efficiency of a novel roller piston pump
- Finite-time path following control of a sailboat with actuator failure and unknown sideslip angle