
Noise robustness of an operational modal-based structural damage-detection scheme using impact-synchronous modal analysis
2023-09-23 08:00:52PeiYiSIOWZhiChaoONGShinYeeKHOOKokSingLIM
Pei Yi SIOW, Zhi Chao ONG, Shin Yee KHOO, Kok-Sing LIM
Research Article
Noise robustness of an operational modal-based structural damage-detection scheme using impact-synchronous modal analysis

1Department of Mechanical Engineering, Faculty of Engineering, Universiti Malaya, Kuala Lumpur 50603, Malaysia2Photonics Research Centre, Deputy Vice Chancellor (Research and Innovation) Office, Universiti Malaya, Kuala Lumpur 50603, Malaysia
Data-driven damage-detection schemes are usually unsupervised machine-learning models in practice, as these do not require any training. Vibration-based features are commonly used in these schemes but often require several other parameters to accurately correlate with damage, as they may not globally represent the model, making them less sensitive to damage. Modal data, such as frequency response functions (FRFs) and principal component analysis (PCA) reduced FRFs (PCA-FRFs), inherits the dynamic characteristics of the structure, and it changes when damage occurs, thus showing sensitivity to damage. However, noise from the environment or external sources such as wind, operating machines, or the in-service system itself, can reduce the modal data’s sensitivity to damage if not handled properly, which affects damage-detection accuracy. This study proposes a noise-robust operational modal-based structural damage-detection scheme that uses impact-synchronous modal analysis (ISMA) to generate clean, static-like FRFs for damage diagnosis. ISMA allows modal data collection without requiring shutdown conditions, and its denoising feature aids in generating clean, static-like FRFs for damage diagnosis. Our results showed that the FRFs obtained through ISMA under noise conditions have frequency response assurance criterion (FRAC) and cross signature assurance criterion (CSAC) scores greater than 0.9 when compared with FRFs obtained through experimental modal analysis (EMA) under static conditions; this validates the denoising feature of ISMA. When the denoised FRFs are reduced to PCA-FRFs and used in an unsupervised learning-based damage-detection scheme, zero false alarms occur.
Impact-synchronous modal analysis (ISMA); Frequency response function (FRF); Principal component analysis (PCA); Unsupervised learning; Damage detection
1 Introduction
Structural health monitoring (SHM) involves periodic monitoring of a structure or system for damage diagnosis. Digital sensors and storage devices are widely available nowadays, which leads to more data-driven SHM approaches in the current market (Lydon et al., 2022). Machine-learning algorithms are used in these data-driven methods to build damage-diagnosis models. Two main categories of machine-learning algorithms are supervised learning and unsupervised learning. Supervised learning-based models are trained with labelled data to build a relationship between the input features and the labels. Hence, with sufficient training data, supervised models can become accurate (Garcia-Perez et al., 2013; Gordan et al., 2020b; Kim et al., 2020; Nick and Aziminejad, 2021). However, it is not practical to create real damage to a structure or wait for damage events to obtain the training samples, which leads to the cold-start problem, especially for new and unobserved structures. When there are insufficient training samples, the extrapolation capacity of the supervised models is generally poor, and overfitting can happen. Therefore, unsupervised learning-based models are more commonly used in actuality, as training is not required.
Most unsupervised models cluster samples based on their unique characteristics, in order to help experts or engineers visualize the overall structure of the dataset and make better decisions in damage diagnosis. Examples of unsupervised learning algorithms are-means, self-organizing maps, hierarchical clustering, and fuzzy clustering, where the unsupervised-means algorithm clusters a dataset intonumber of groups;is defined by the user. In unsupervised damage-detection applications, the anomaly-detection method is commonly used. The undamaged samples form the baseline cluster, and the structure is considered damaged when an outlier is detected. Santos et al. (2016) applied an unsupervised method using multi-layer perceptron (MLP) and a-means algorithm for damage detection of a cable-stayed bridge, whereas Sarmadi et al. (2021) used-medoids with a probabilistic-based alarm threshold for bridge monitoring. Svendsen et al. (2022) applied the Mahalanobis squared distance (MSD) unsupervised approach for bridge monitoring. All three studies showed positive results in detecting early damage with minimal false detections. Bouzenad et al. (2019) implemented-means with an alarm threshold-setting method to detect damage to pipelines and tubes. Entezami and Shariatmadar (2018) used an autoregressive model to detect damage presence and applied damage indices to further identify the severity and locations of the damage. Daneshvar and Sarmadi (2022) proposed an information-based anomaly detector with a novel threshold-limit-setting approach for damage detection in civil structures. Results showed accurate discrimination of damaged and undamaged samples. Most studies on unsupervised models recommend lower dimensional data for more effective clustering. High-dimensional data can be too complex and also contaminated by noise, leading to lower data sensitivity. Therefore, several studies of this kind applied dimension-reduction or feature-extraction techniques to the dataset before clustering so that only the important features would be extracted. The principal component analysis (PCA) algorithm is commonly applied before unsupervised clustering to reduce data complexity and remove noise. Kumar et al. (2020) applied PCA to time series data to extract the damage-sensitive feature for unsupervised damage detection, and the results were more than 90% in accuracy for damage detection. Solimine et al. (2020) applied PCA to the acoustics data to reduce data dimensionality before sending them for-means clustering-based damage detection for a wind-turbine blade. The results showed that PCA helped maximize the spread of the dataset, which enabled outliers to be easily detected. Kouadri et al. (2020) applied PCA to extract the damage-sensitive features to be used in a hidden Markov model (HMM) for fault diagnosis of wind energy converter systems. Generally, unsupervised methods have been shown to be practical and effective in detecting damage, and PCA is effective in reducing the dimensions of the data and extracting the important features from it to be used for these methods.
The features that are sensitive to damage are the key to accurate damage detection. A common condition-monitoring setup involves placing different sensors to collect various parameters. Statistical features from the collected raw data, which usually consist of several parameters, are often used to determine structural health. However, the correlation between these features and damage needs to be built through multiple sources of variability that may not globally represent the model, which raises uncertainties in damage detection. On the other hand, modal parameters such as natural frequencies and mode shapes are directly related to structural dynamic behaviour. A change in modal parameters such as natural frequencies and mode shapes, indicates a change in the structural dynamic behaviour, and is thus a sign of structural damage.
In general, there are two main approaches to using modal parameters as the features for damage identification: physics-based and data-driven. An example of a widely used physics-based method is the inverse finite element (FE) model, which is updated using modal parameters. The changes or differences in the modal data between the FE model and the actual structure suggest potential structural damage, and the location and severity of the damage can also be identified. To build a reliable FE model, calibration using field measurements is required (Brownjohn et al., 2001). However, the number of parameters measured is more likely to be lower than that of the actual parameters in an FE model, which results in a low- to medium-fidelity-level FE model with uncertainties that can reduce the confidence level in the assessment stage. Thus, high-fidelity models are much preferred, but they are computationally intensive. Recent years have seen active research on reducing the computational burden and modelling the uncertainties of FE models (Wan and Ni, 2018; Xin et al., 2019; Zhou and Tang, 2021). On the other hand, data-driven methods use statistical and machine-learning algorithms, and the damage-assessment model is derived based on the available data. Several investigations have used natural frequencies and mode shapes as the damage features for machine-learning-based methods (Ozdagli and Koutsoukos, 2019; Fleet et al., 2020; Gordan et al., 2020a; Gillich et al., 2022). Modal parameters need to be extracted from the frequency response functions (FRFs). As the modal parameters are not the upstream data, they incur measurement errors from the extraction process and thus reduce the overall sensitivity to damage. Therefore, more researchers are using the FRFs directly as the damage features. The main limitation of using raw FRFs for damage detection is the high complexity of data, especially when there are many measurement points on the structure; this could be computationally exhaustive. Hence, some researchers have applied PCA to reduce the dimensions of the FRFs before using them for machine-learning-based damage identification (Elyasi et al., 2019; Chen et al., 2020; Jayasundara et al., 2020; Padil et al., 2020; Bokaeian et al., 2021; Siow et al., 2021). The first few principal components generated are then selected based on their cumulative contribution and used to reconstruct the lower-dimensional FRFs, which are used as the features in a machine-learning-based method. In general, PCA is effective in reducing the dimensions and denoising the FRFs, making the PCA reduced FRF (PCA-FRF) a damage-sensitive feature in a machine-learning-based method.
Modal analysis is required to extract the FRFs for damage detection. Experimental modal analysis (EMA) has been the most conventional technique used by researchers and engineers over the years. EMA is an input-output method which requires measurement of both input and output signals to obtain the FRFs. As the input force needs to be measured, EMA is usually performed in controlled environment, for example, in a laboratory or on a static or shutdown system; this is not practical for industrial applications due to high downtime costs. Noise that is unaccounted for may contaminate the FRFs and reduce the modal parameters' sensitivity to damage. Another technique is operational modal analysis (OMA), which is an output-only method. OMA measures the response of a structure excited by ambient white noise, and it has been performed on real-world structures such as bridges (Xie et al., 2020; Favarelli et al., 2022; Mao et al., 2022) and buildings (Foti et al., 2020) exposed to environmental noise such as wind. A recent study also showed that OMA could be performed on a variable-mass structure such as an aerospace structure with decreasing fuel (Ma et al., 2020). It has also been applied for operating machinery but requires additional data-processing methods to eliminate the harmonic excitation frequencies that are close to the structural modes (Chen et al., 2021; Kang et al., 2021). Meanwhile, the harmonic frequencies must be known beforehand, which makes the actual implementation of OMA more difficult and costly than it would be otherwise (Liu et al., 2022). Although OMA seems to be more practical than EMA, unaccounted-for input forces could affect the normalization of mode shapes.
Impact-synchronous modal analysis (ISMA) is an alternative method developed to overcome the drawbacks of EMA and OMA. It is an input-output method with impact-synchronous time averaging (ISTA), which removes harmonic signals and noise through time-averaging of the impact forces and responses. The past decade has witnessed gradual improvements and developments in the ISMA method, particularly in reducing the number of impacts through controlled impact timing (Lim et al., 2019; Ong et al., 2019; Zahid et al., 2020). The impact is imparted at off-phase angles to eliminate the non-synchronous components and cyclic loads without the need for a large number of averages (Ong et al., 2017). Ong et al. (2018) developed an auto-impact device using ISMA to control the impact timing for effective denoising, and found it to be suitable for operational modal testing. Another recent development integrated human behaviour recognition and machine learning into ISMA for more accurate impact-time prediction, and the results showed an overall low mean prediction error of 5.1% (Zahid et al., 2021).
Overall, unsupervised methods require damage-sensitive features for accurate damage detection. Modal parameters are well known for their direct relationship with damage, as they describe structural dynamic behaviour. The FRFs are more damage-sensitive because they are the upstream data, but they are complex, especially when there are many measurement points. FRF-based methods involve conventional modal analysis techniques that would either require shutdown conditions or compromise the accuracy of modal data. Therefore, we propose a robust operational damage-detection scheme utilizing the denoising feature of ISMA. The damage scheme applies an unsupervised method and uses the PCA-FRF as the damage-sensitive feature. We used a plate-like structure and a beam-like structure for the case studies. Different in-service noise conditions were simulated using an electric motor and an electrodynamic shaker. To evaluate the denoising feature of ISMA, we compared FRFs obtained using ISMA under noise conditions with FRFs obtained using EMA under static conditions. The damage scheme was also tested with the ISMA's PCA-FRF to validate its overall noise robustness. The main objective of this work was to demonstrate the noise robustness of the proposed ISMA-based scheme. We focused on the importance of having clean data to avoid false alarms at the first step of damage detection: differentiating between an undamaged state and damaged state of the structure.
2 Theoretical background
2.1 ISMA
ISMA is a modal analysis technique developed to overcome the drawbacks of conventional modal analysis techniques, i.e., EMA and OMA. Like the EMA technique, ISMA is an input-output modal analysis technique that requires measurement of both input and output signals. The main difference between ISMA and EMA is the averaging technique used.

The spectral averaging technique is adequate when the measurement is performed on static structures, as only the structural responses due to the known impact are measured. Although the spectral averaging technique can smooth noise-contaminated FRFs with sufficient averages, it may be insufficient to effectively suppress the noise and remove the cyclic load due to their unpredictable or random nature (Rahman et al., 2011a).







To effectively suppress the noise in a minimum number of averages with ISMA, impact timing needs to be controlled; impacts have to be imparted at the phase which is inconsistent with the phase of response due to cyclic load (Lim et al., 2018). Studies have shown that a minimum of only four averages is required when impacts are consecutively applied at 180° out of phase, and the cyclic peak can be suppressed up to 82.25% (Ong et al., 2017, 2019).
In our proposed scheme, ISMA is applied to eliminate noise and cyclic load components, so that a set of clean and static-like FRFs that only consists of the structural dynamic characteristics can be generated for damage-identification purposes.
2.2 FRF and its correlation techniques
The set of FRFs is obtained from the frequency domain after FFT of the cleaned time-domain signal. For this study, we evaluated the denoising performance of ISMA by comparing the qualities of FRFs generated by EMA and ISMA performed under noise conditions. The benchmark FRFs were generated by EMA under static conditions. The denoising performance was considered good if the FRFs generated resembled or had high correlation with the benchmark FRFs.
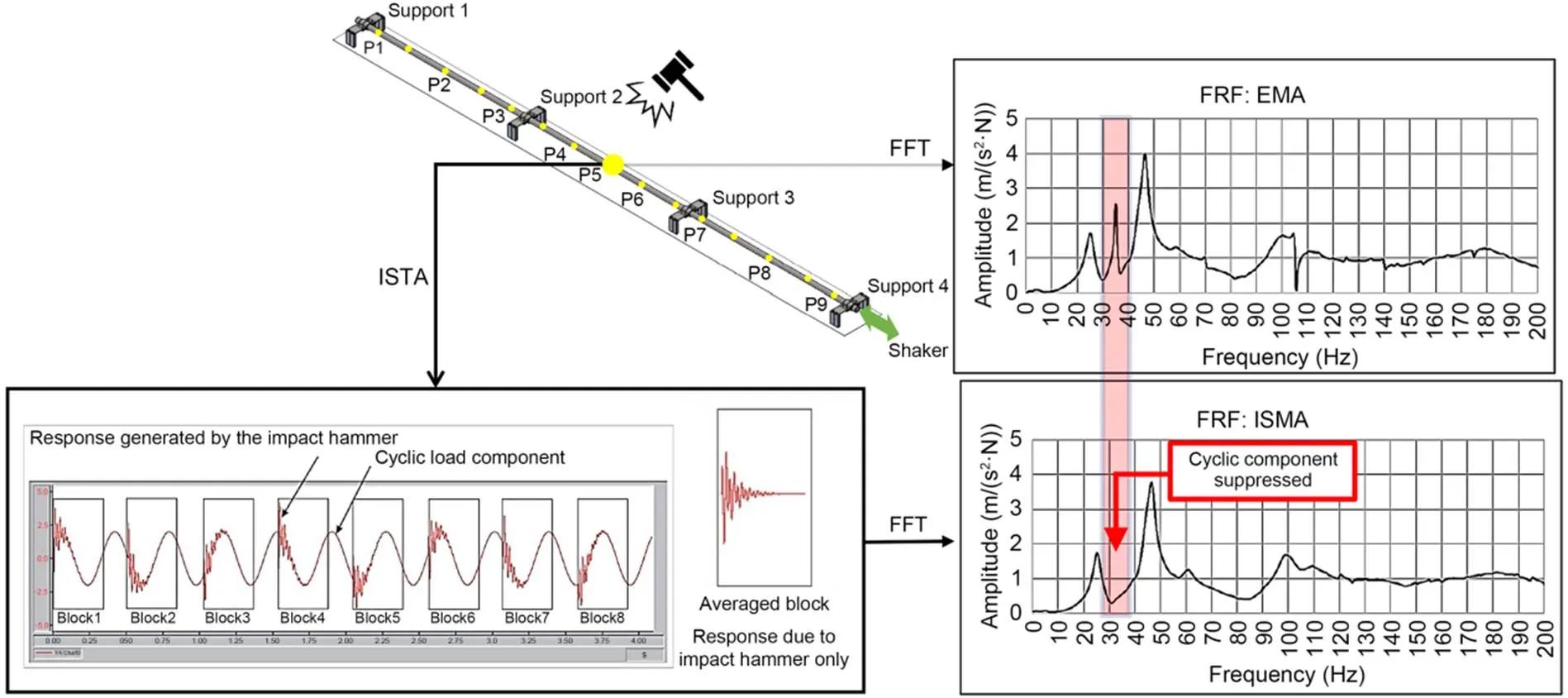
Fig. 1 Elimination of the running speed with ISTA and the generated FRF (Zahid et al., 2020)
We used the frequency response assurance criterion (FRAC) (Shin, 2016) and cross signature assurance criterion (CSAC) (Lim et al., 2019) to measure the correlation between two sets of FRFs. The FRAC is used to quantify the correlation between two FRFs of a single measurement point over a frequency range. Eq. (7) (Shin, 2016) shows the mathematical equation for the FRAC:
The CSAC is used to quantify the correlation of two sets of FRFs at a frequency point. Eq. (8) (Lim et al., 2019) shows the mathematical equation for the CSAC:

2.3 Principal component analysis for PCA-FRF construction
FRFs can be complex, especially when dense measurements are involved, so dimension reduction is usually required before unsupervised clustering-based damage detection to extract the main features that are sensitive to damage. Several researchers have used PCA to reduce the dimensions of FRFs before damage identification (Bandara et al., 2014; Khoshnoudian and Talaei, 2017; Das and Roy, 2022). Through orthogonal projection, the variables in the original dataset are linearly transformed into uncorrelated variables, also known as principal components (PCs), which form a new coordinate system that can better show the variability in the dataset. The total number of PCs equals to the total number of variables in the dataset. The first principal component PC1 indicates the direction of the original data by means of the maximum variance (eigenvalue). The next principal component PC2 is orthogonal to PC1 with the maximum variance, and so on. The ranks of the PCs correspond to their contribution to the original dataset, and higher-ranked PCs are the main features of the dataset. Thus, the lower-dimension dataset only requires the first few PCs. The cumulative contribution of the PCs needs to be investigated to determine the optimum number.
For the proposed scheme, after generating clean FRFs through ISMA, we applied PCA to the FRFs to generate the PCs. The first two PCs (PC1 and PC2) were used to construct the single-lined PCA-FRF, because according to a previous study done by our team, the fact that the cumulative contribution of the first two PCs was more than 99.9% indicated that the first two PCs represented the original FRFs by 99.9% (Siow et al., 2021). The PCA-FRF peaks were shown to be sensitive to damage when an unsupervised-means damage-detection method is used. Therefore, we constructed PCA-FRF with the first two PCs, and other construction details can be referred to in the published work done by our team (Siow et al., 2021). The peaks of the PCA-FRF were then extracted to be used as the features for the unsupervised clustering-based damage-detection method.
2.4 Unsupervised k-means clustering for damage detection


For the proposed scheme, we used the unsupervised-means algorithm and preset the value ofas 2. An undamaged cluster and a damaged cluster are expected when damage is present. We used Dunn's index to evaluate the clustering result each time a new data point was added. The peaks of the PCA-FRF were used as the features for the unsupervised-means-based damage-detection method. When damage occurred, the peaks shifted horizontally from the undamaged peaks due to stiffness reduction. Thus, when the damaged and undamaged peaks were sent for clustering, two distinct clusters formed, resulting in a high Dunn's index. When only the undamaged peaks were sent for clustering, the clusters formed were less distinguishable due to the unchanged structural dynamic behaviour, resulting in a lower Dunn's index if there were a sufficient number of undamaged peaks. In application, only undamaged samples will be available for clustering initially, so Dunn's index is expected to be lower than that when there is damaged data; there is only one cluster in actuality when a structure is undamaged. Therefore, for the proposed scheme, the damage threshold is Dunn's index of the undamaged or baseline cluster. Damage would be detected when the updated Dunn's index surpassed the baseline Dunn's index.
3 Methodology
3.1 Framework of the proposed damage-detection scheme
Fig. 2 shows the overall framework of the proposed ISMA-based damage-detection scheme. Basically, it consists of three stages: signal denoising using ISMA, dimension reduction and feature extraction using PCA, and damage detection using the unsupervised-means algorithm. First, the structural responses due to impact are collected and ISTA is performed to eliminate the cyclic load components and random noise in the signals. The cleaned signals are then processed through FFT to generate clean FRFs. As the FRFs are highly dimensional in nature, especially when dense measurement points are implemented, the dimensions of the FRFs need to be reduced before using FRFs as features for damage detection in an unsupervised machine-learning method. Thus, PCA is applied to the FRFs to generate the PCs. The first two PCs are then selected and used to construct the single-lined PCA-FRF, and the peaks are extracted to be used as the input features of the unsupervised-means method. As the proposed scheme implements the anomaly-detection concept, a baseline cluster, which consists of undamaged peaks, is first required. Dunn's index, which is generated after an iteration of clustering of the undamaged peaks, is monitored as more undamaged peaks are added for clustering. In this study, we considered the baseline cluster ready for use when Dunn's index of the undamaged peaks started to converge or remained constant at a certain value, which was used as the damage threshold. Once the baseline cluster was ready, damage detection was initiated. When the added peak surpassed the damage threshold (undamaged Dunn's index), damage was detected.
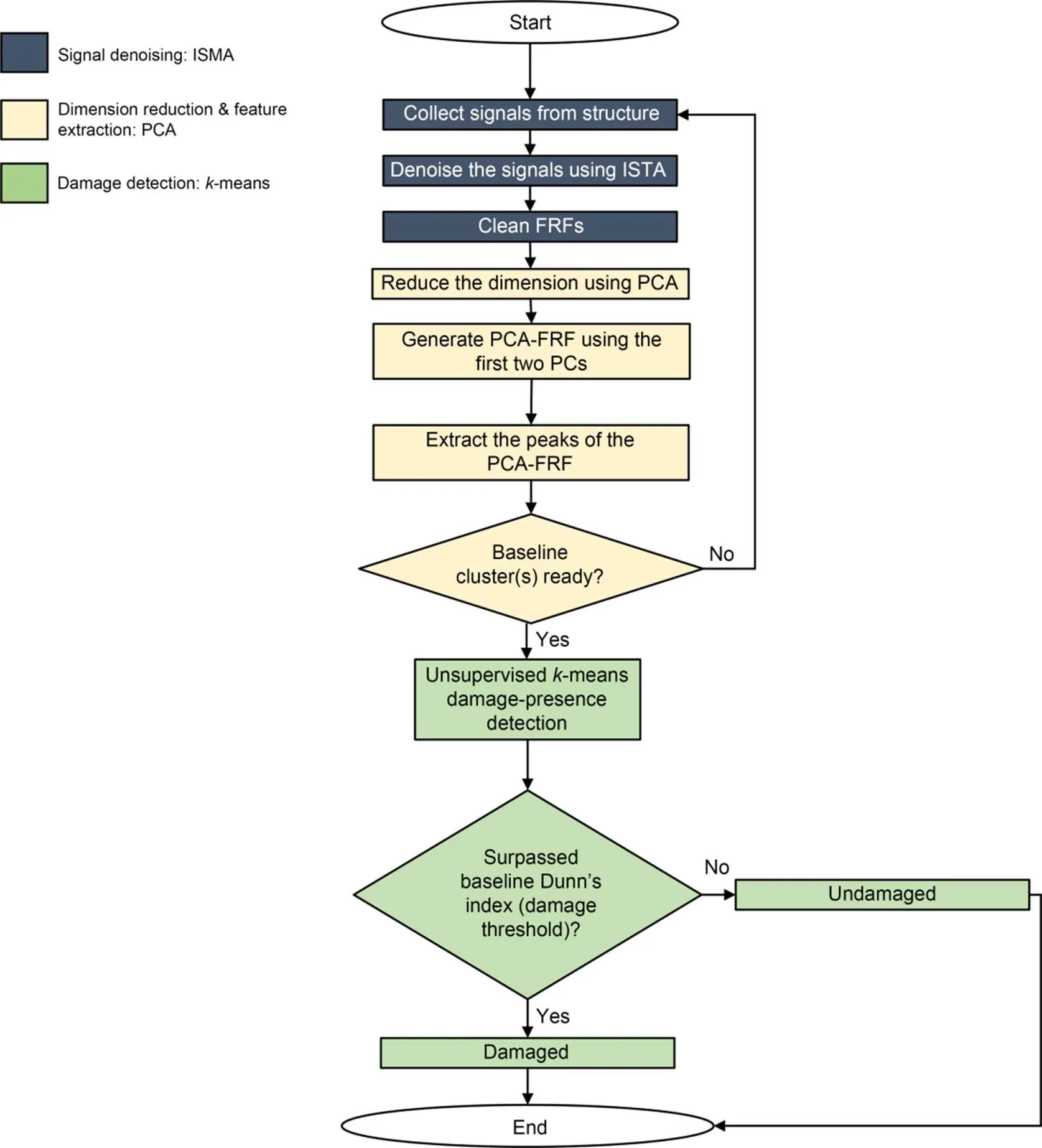
Fig. 2 Framework of the proposed operational modal-based damage scheme with ISMA
3.2 Experimental setup
Figs. 3 and 4 show the experimental setups for the plate-like and beam-like structures, respectively, and Table 1 defines the labels shown in the two figures. In general, an impact hammer was used to excite the structure and accelerometers were used to collect structural responses to the impact. The FRFs of the undamaged structure obtained using EMA under static conditions were set as the benchmark FRFs. When noise was simulated on the undamaged structures, EMA and ISMA were performed. The FRFs obtained through the two modal analysis techniques were then compared in terms of FRAC and CSAC to quantify the correlation between the FRFs and the benchmark FRFs.
Table 2 shows the noise conditions generated in this study and their descriptions. Two types of noise conditions were generated: harmonic excitation and random noise excitation. For the plate-like structure, harmonic excitation with a sine wave of 40 Hz was generated by a motor to simulate the in-service conditions of a plate-like structure, i.e., automobile chassis. For the beam-like structure, reciprocating excitations with square waves of 20 Hz and 35 Hz were generated by a shaker to simulate the in-service conditions of a pipe structure. Random noise was generated by the same shaker on the beam-like structure to simulate exposure of the structure to various noise sources that would be present in actual scenarios.
Table 3 describes the simulated damage conditions for the plate-like and beam-like structures. The screws that secured the plate-like and beam-like structures to the corresponding supports were loosened to create stiffness-reduced damage conditions. We simulated single-damage cases at each of the supports of the plate-like and beam-like structures.

Table 1 Description of the labels from Figs. 3 and 4
MEMS: micro-electro-mechanical system
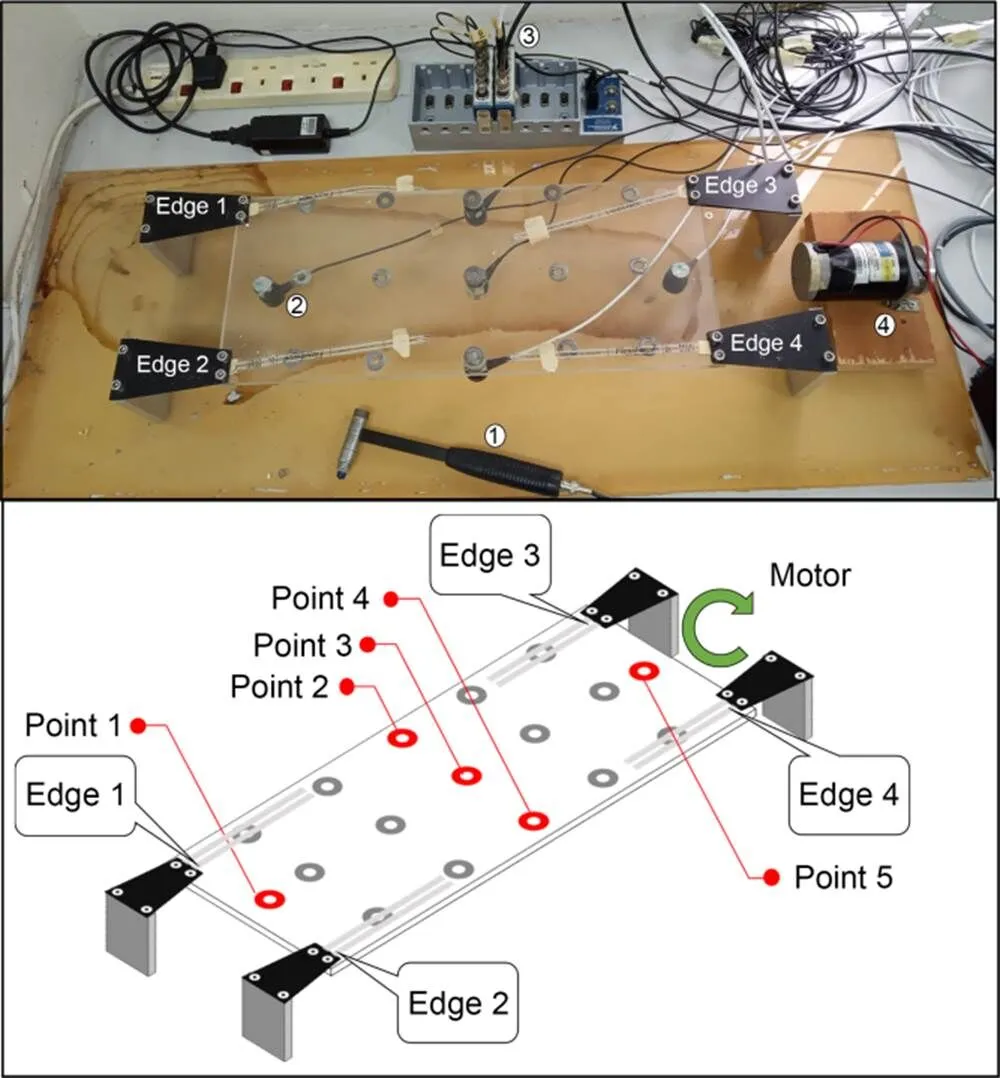
Fig. 3 Experimental setup and schematic diagram of the plate-like structure
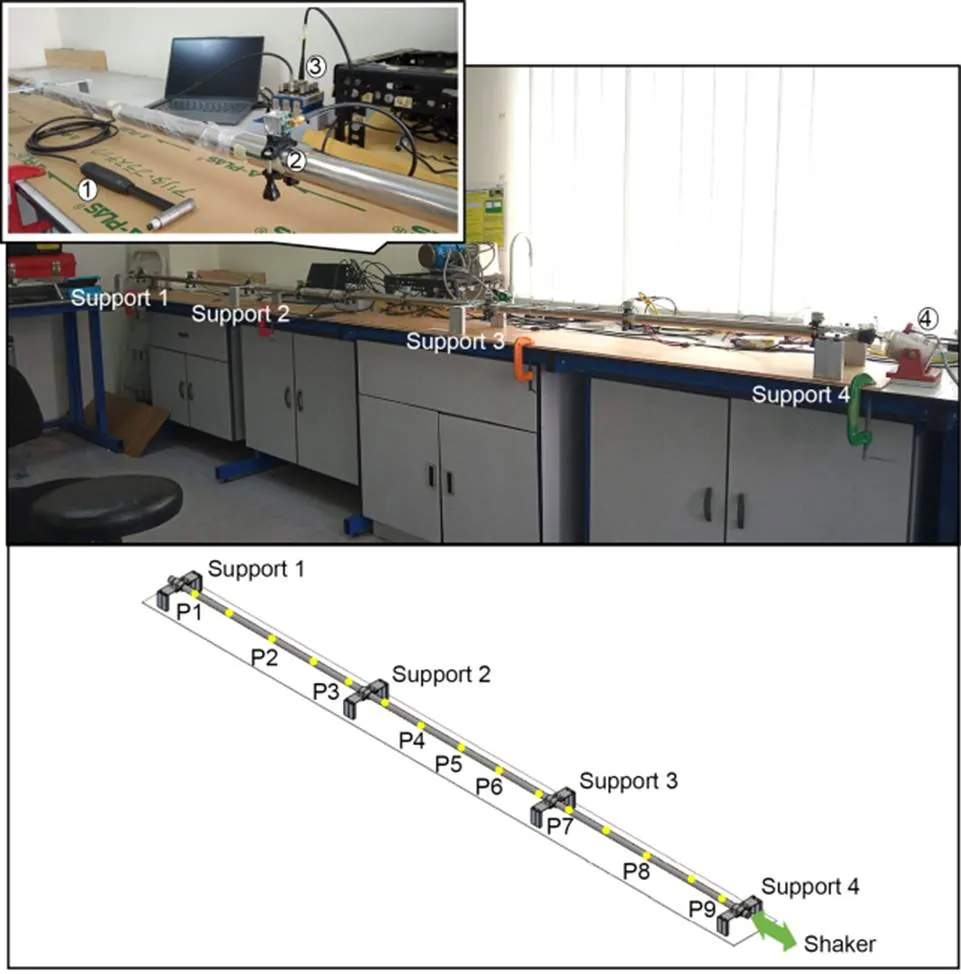
Fig. 4 Experimental setup and schematic diagram of the beam-like structure
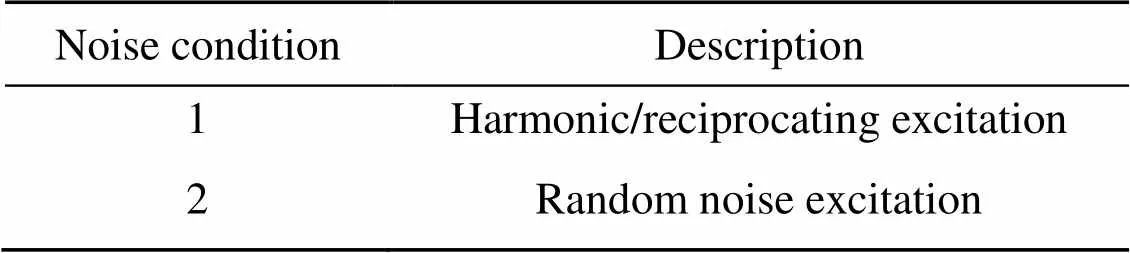
Table 2 Simulated noise conditions with descriptions
Table 3 Simulated damage conditions on the plate-like and beam-like structures
3.3 Unsupervised k-means clustering-based damage-detection method
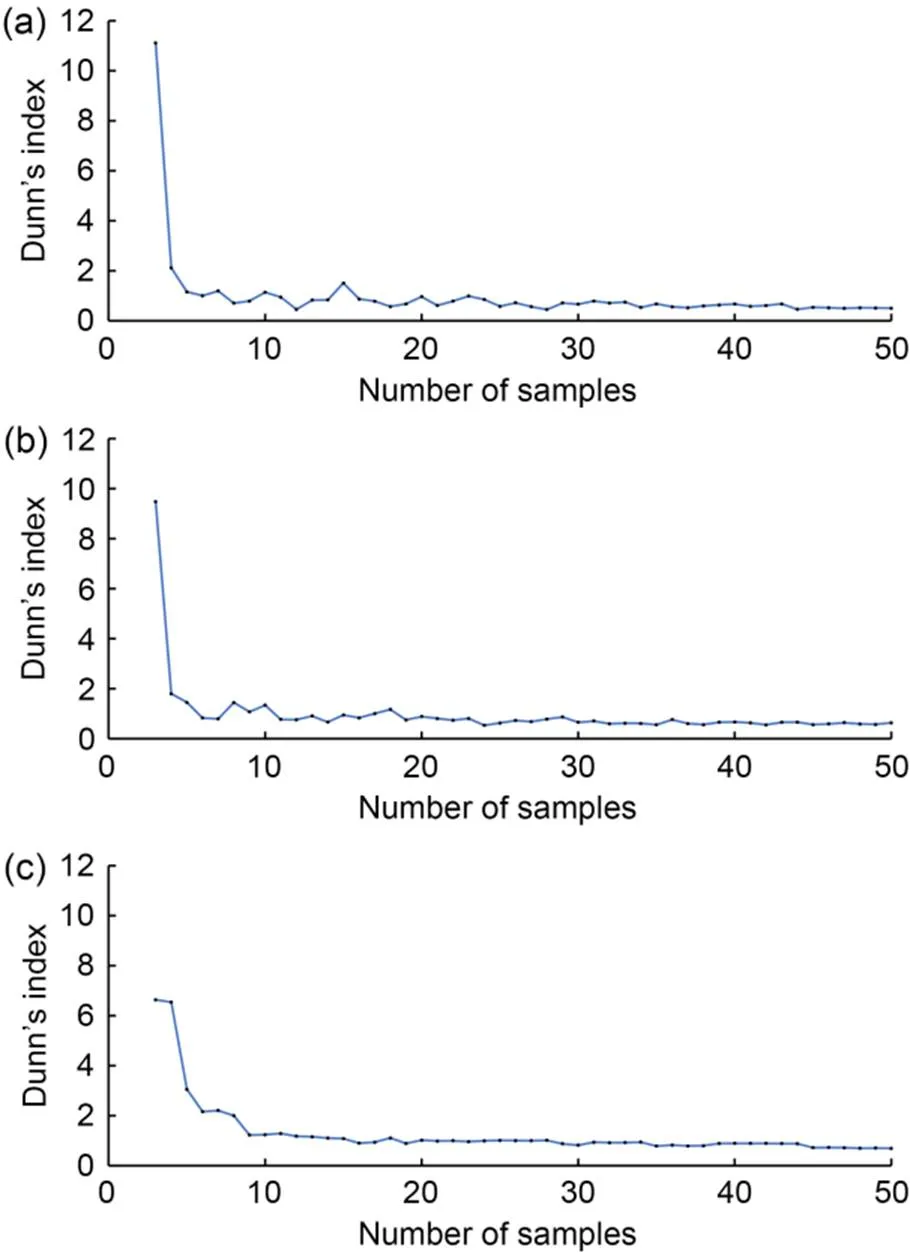
Fig. 5 Dunn's indices for the undamaged PCA-FRF peaks 1 (a), 2 (b), and 3 (c) into the baseline cluster of the plate-like structure
For the plate-like and beam-like structures, we used 50 undamaged samples. Each of the PCA-FRF peaks was sent for clustering and the value of Dunn's index was observed. Figs. 5 and 6 show Dunn's indices for the undamaged peaks of the plate-like and beam-like structures, respectively. In general, it was clear that for both structures, Dunn's index deviated below 2 as more undamaged samples were added for clustering. Therefore, the damage threshold was set as 2 for both structures, so that when a new data point was added for clustering and Dunn's index was greater than 2, the structure would be detected as damaged. The damage threshold should be set based on undamaged samples from the individual structure, and other factors should also be considered, such as the environmental conditions of the undamaged structure. As the main objective of this study is to demonstrate the noise robustness of the proposed ISMA-based damage scheme and the focus is therefore on the denoising performance of ISMA, the damage threshold (Dunn's index) was set as 2 for both structures we studied.
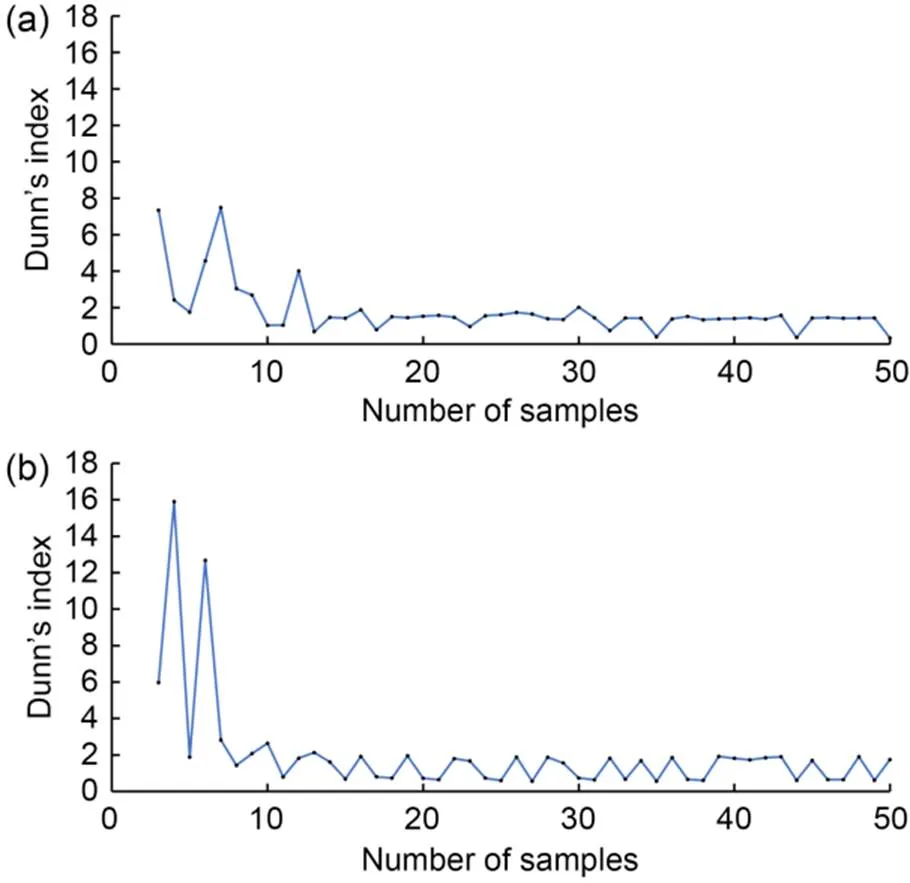
Fig. 6 Dunn's indices for the undamaged PCA-FRF peaks 1 (a) and 2 (b) into the baseline cluster of the beam-like structure
4 Results and discussion
4.1 Denoising feature of ISMA on FRFs
Fig. 7 shows the FRFs of the undamaged state for the plate extracted using EMA and ISMA under noise conditions, with the FRFs extracted using EMA under static conditions set as the benchmark. A harmonic excitation of 40 Hz was applied to the plate-like structure for noise condition 1 to simulate the in-service conditions of a motor-driven plate-like structure. Based on the benchmark FRFs of the plate-like structure shown in Fig. 7a, we would like to point out that there are five notable peaks at 17.5 Hz, 34.0 Hz, 43.0 Hz, 93.0 Hz, and 168.5 Hz within the frequency range of 0–200 Hz, which are the structural modes. When noise condition 1 was simulated on the plate-like structure and EMA was performed, an additional sharp peak with a frequency of 40.0 Hz was observed in the FRFs. We also noted that the FRF lines were not as smooth as the benchmark FRFs when EMA was performed in the presence of noise. On the other hand, the 40.0-Hz peak was absent and the FRF lines were smooth when ISMA was performed on the noise-induced plate. In general, the number of structural modes in the ISMA FRFs was equal to that in the benchmark FRFs, indicating the capability of ISMA for removing non-structural modes.
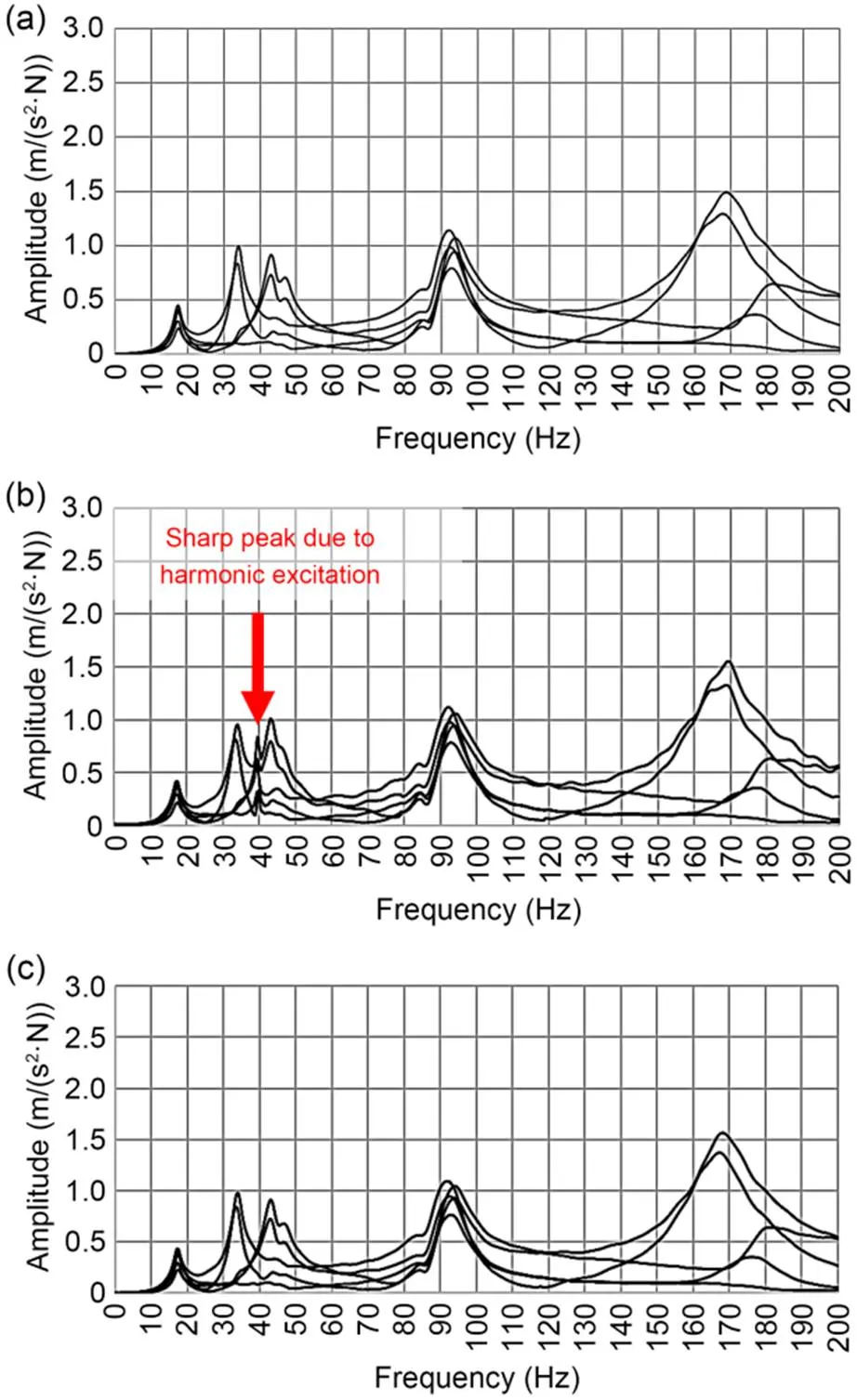
Fig. 7 FRFs of an undamaged plate-like structure using: (a) EMA under static conditions as the benchmark FRFs; (b) EMA with noise condition 1; (c) ISMA with noise condition 1
Figs. 8 and 9 show the FRAC and CSAC of the FRFs, with the FRFs obtained under static conditions as the benchmark. Based on Figs. 8 and 9, we found that when another set of EMA static FRFs was compared with the benchmark FRFs, the FRAC and the average CSAC were generally greater than 0.999. This showed that when the structure was still undamaged, the structural dynamic behaviour remained unchanged; thus, the FRFs were generally the same as the benchmark set when EMA was performed under static conditions. However, when EMA was performed under noise conditions, the FRAC and average CSAC indices dropped even when the structure was still undamaged. The minimum FRAC dropped from 0.999103 to 0.992063, whereas the average CSAC dropped from 0.99912 to 0.99579 when noise was induced. Based on Fig. 9, we noted that within the frequency range of 35–40 Hz, the CSAC dipped to 0.95923 for the EMA-noise FRFs, which indicated a poorer correlation of the FRFs in that range with the benchmark FRFs. When ISMA was performed under the same noise conditions, both FRAC and average CSAC indices were greater than 0.999, indicating a high correlation with the benchmark FRFs in general, even though noise was present. At the frequency range of 35–40 Hz, the minimum CSAC for ISMA FRFs was 0.998; this was higher than the EMA-noise FRFs, indicating a higher correlation with the benchmark FRFs due to the absence of the cyclic peak. Therefore, it was evident that the ISMA was capable of removing the cyclic load and thus producing static-like FRFs for a plate-like structure when noise was present.
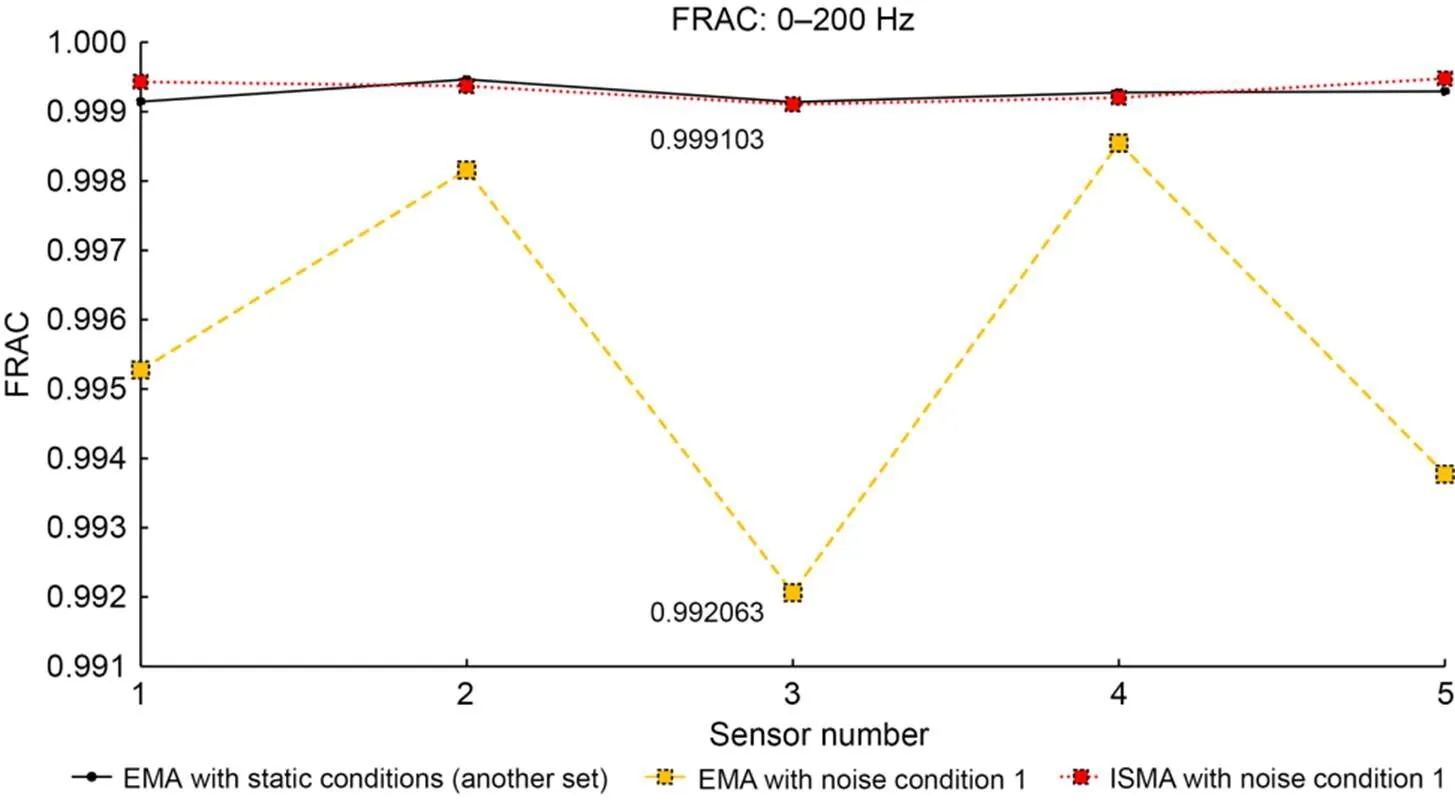
Fig. 8 FRAC between the FRFs of the plate-like structure, as measured by EMA and ISMA. The FRFs measured by EMA under static conditions were used as the reference
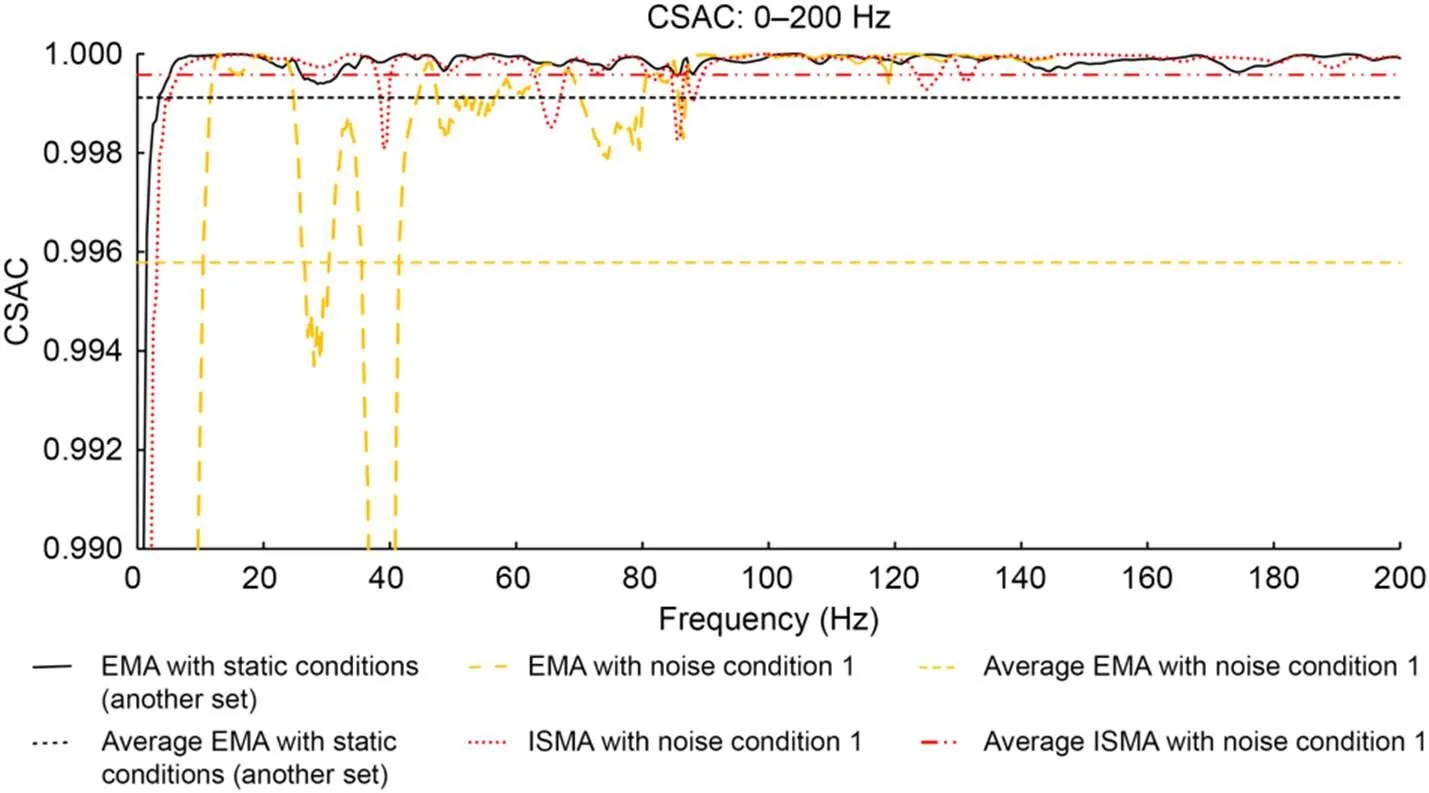
Fig. 9 CSAC between the FRFs of the plate-like structure, as measured by EMA and ISMA. The FRFs measured by EMA under static conditions were used as the reference
Figs. 11 and 12 show the FRAC and CSAC of the FRFs, with the static FRFs using EMA as the benchmark for the beam-like structure. One can see from Fig. 11 that when EMA was performed under noise conditions, the minimum FRAC was 0.565454 and 0.333459 for noise conditions 1 and 2, respectively. The average CSAC values for noise conditions 1 and 2 were 0.81714 and 0.76449, respectively (Fig. 12). This shows that the FRFs obtained during operation and noise exposure using EMA are poorly correlated with the benchmark FRFs even when there are no changes in the structural dynamic behaviour. However, the ISMA FRFs show a higher correlation with the benchmark FRFs; the minimum FRACs were 0.966341 and 0.947158 for noise conditions 1 and 2, respectively. We also noted that the average CSAC values for the ISMA FRFs were 0.968000 and 0.983000 for noise conditions 1 and 2. The higher FRAC and average CSAC values shown when ISMA is performed indicate a higher correlation of the FRFs with the benchmark FRFs. Thus, it is evident that ISMA is capable of denoising the FRFs and producing static-like FRFs. It can therefore be applied on in-service plate-like and beam-like structures in actual scenarios to generate clean data for modal-based damage identification.
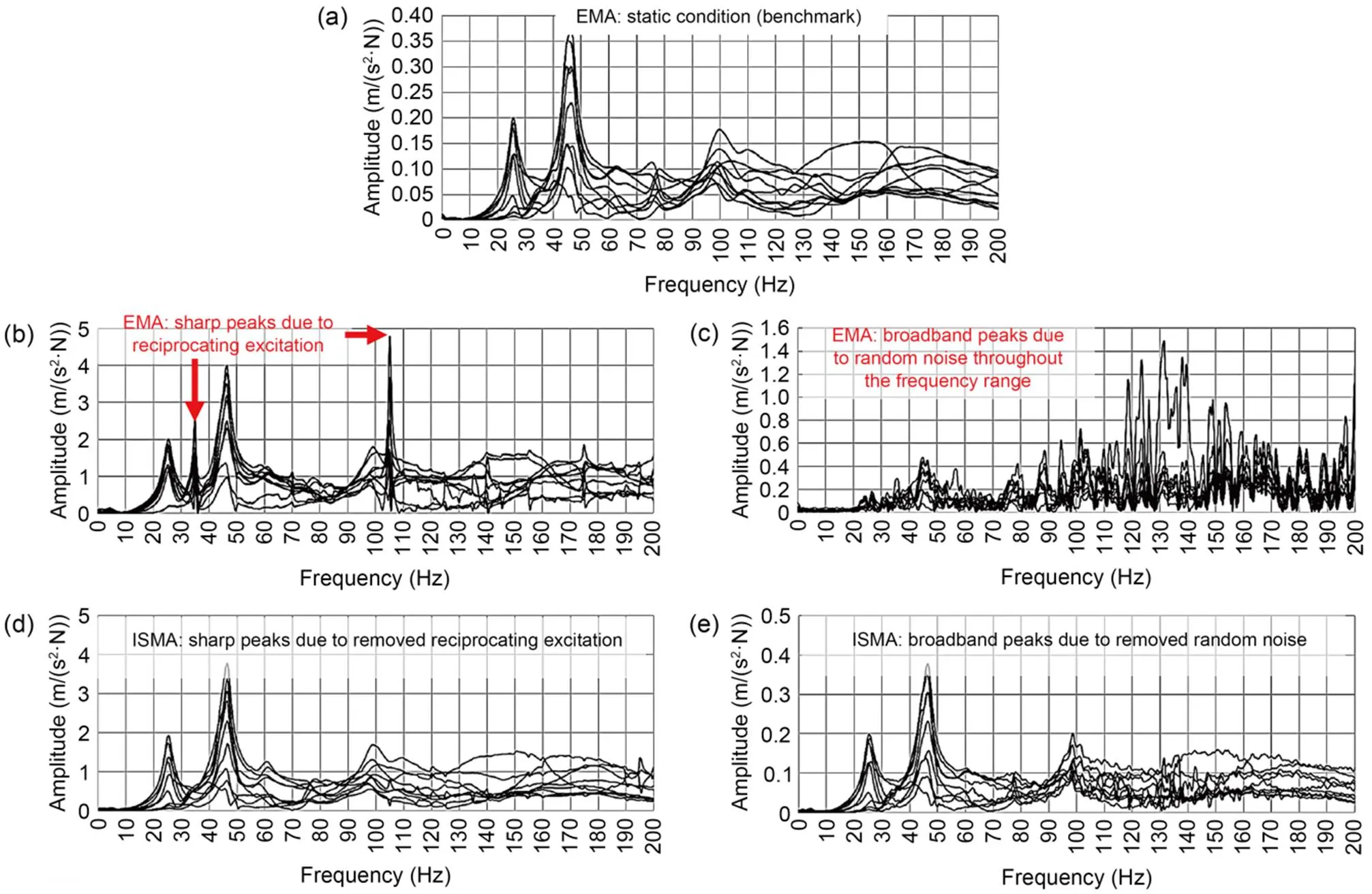
Fig. 10 FRFs of undamaged beam-like structure obtained using: (a) EMA under static conditions; (b) EMA with noise condition 1; (c) EMA with noise condition 2; (d) ISMA noise with condition 1; (e) ISMA with noise condition 2
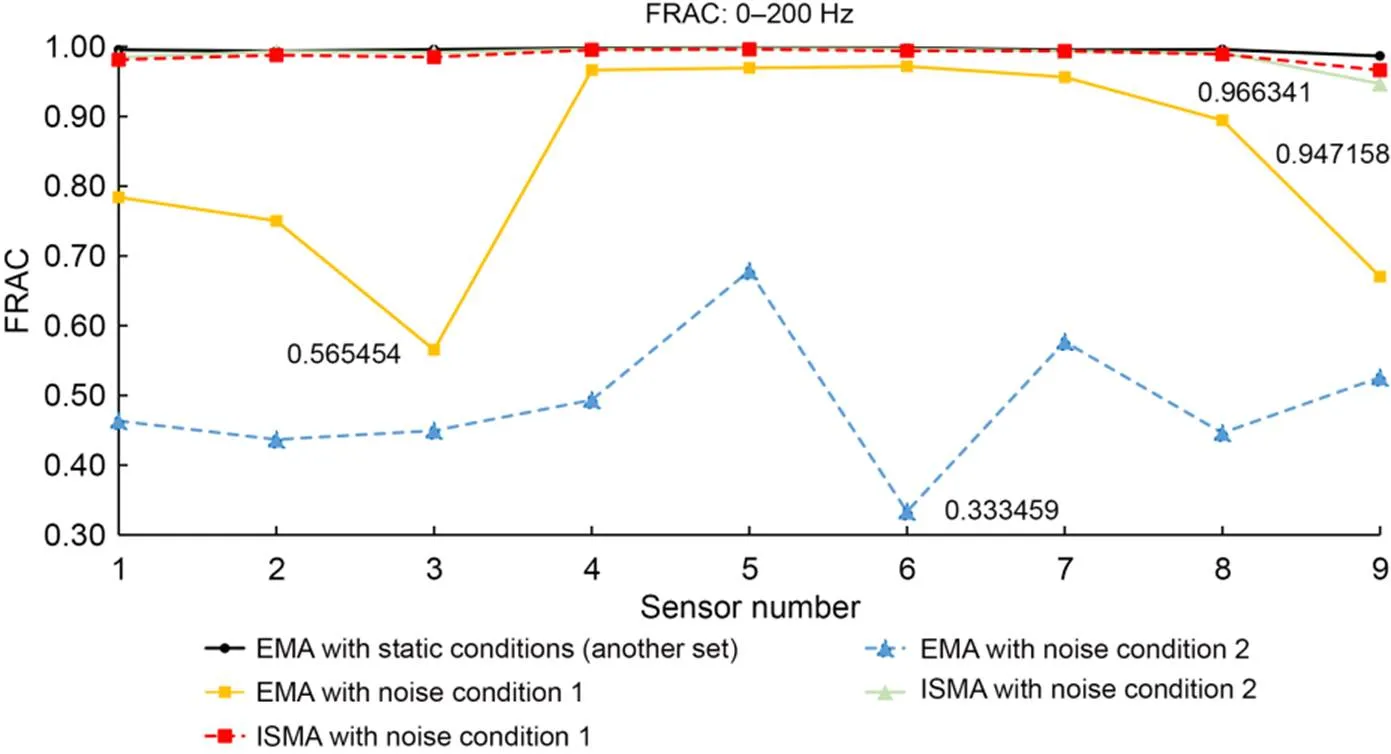
Fig. 11 FRAC between the FRFs measured by EMA and ISMA of the beam-like structure. The FRFs measured by EMA under static conditions are used as the reference
4.2 Robustness-to-noise effect of ISMA implementation in an unsupervised damage-detection method
Figs. 13 and 14 show the overlaid undamaged PCA-FRFs for noise conditions of the plate-like and beam-like structures, respectively, with the PCA-FRF obtained from EMA during static conditions used as the benchmark. Generally, it is shown that when EMA is performed under noise conditions, Dunn's index exceeds the damage threshold of 2, which indicates damage presence. As the shift of the PCA-FRF peaks from the undamaged state is applied for damage detection, the additional peaks due to noise lead to false alarms. On the other hand, we observed that when ISMA is performed under noise conditions, the PCA-FRF resembles the benchmark PCA-FRF, where only the resonance peaks were shown in the figures.
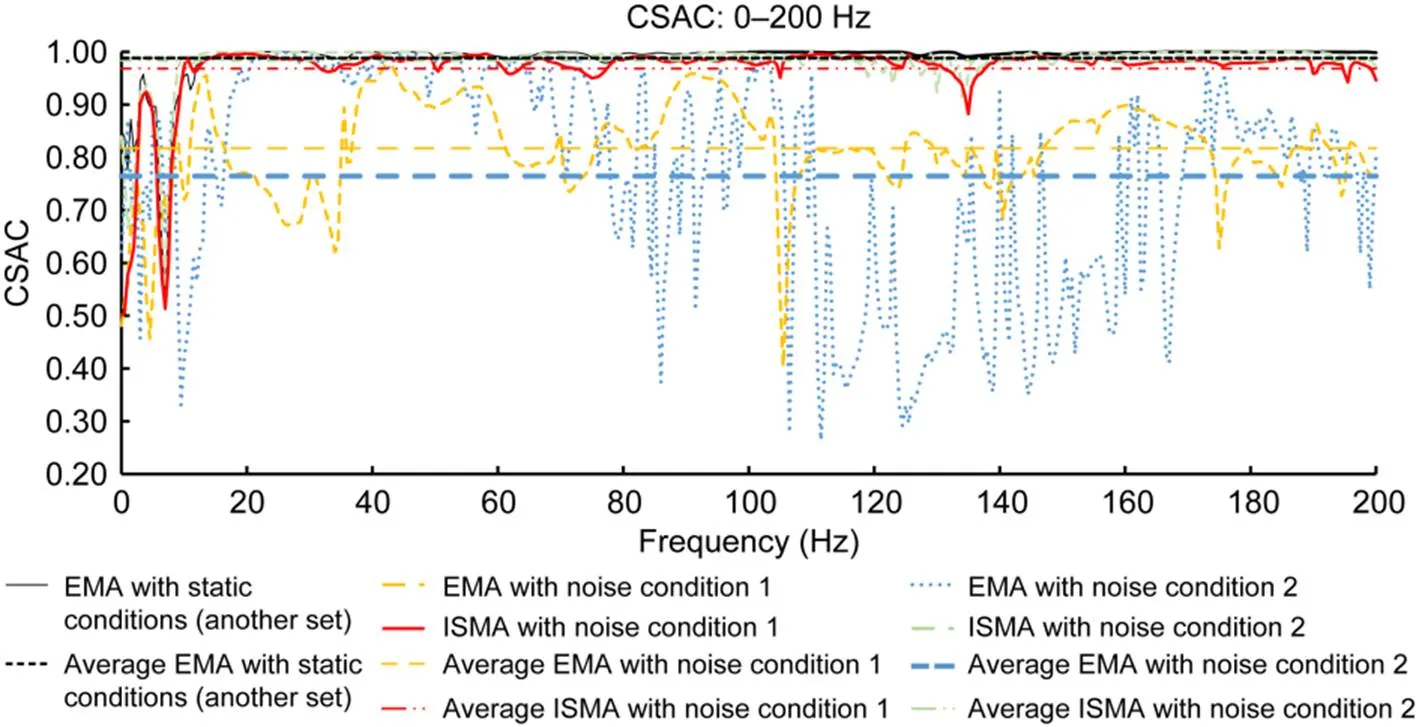
Fig. 12 CSAC between the FRFs of the beam-like structure measured by EMA and ISMA. The FRFs measured by EMA under static conditions are used as the reference
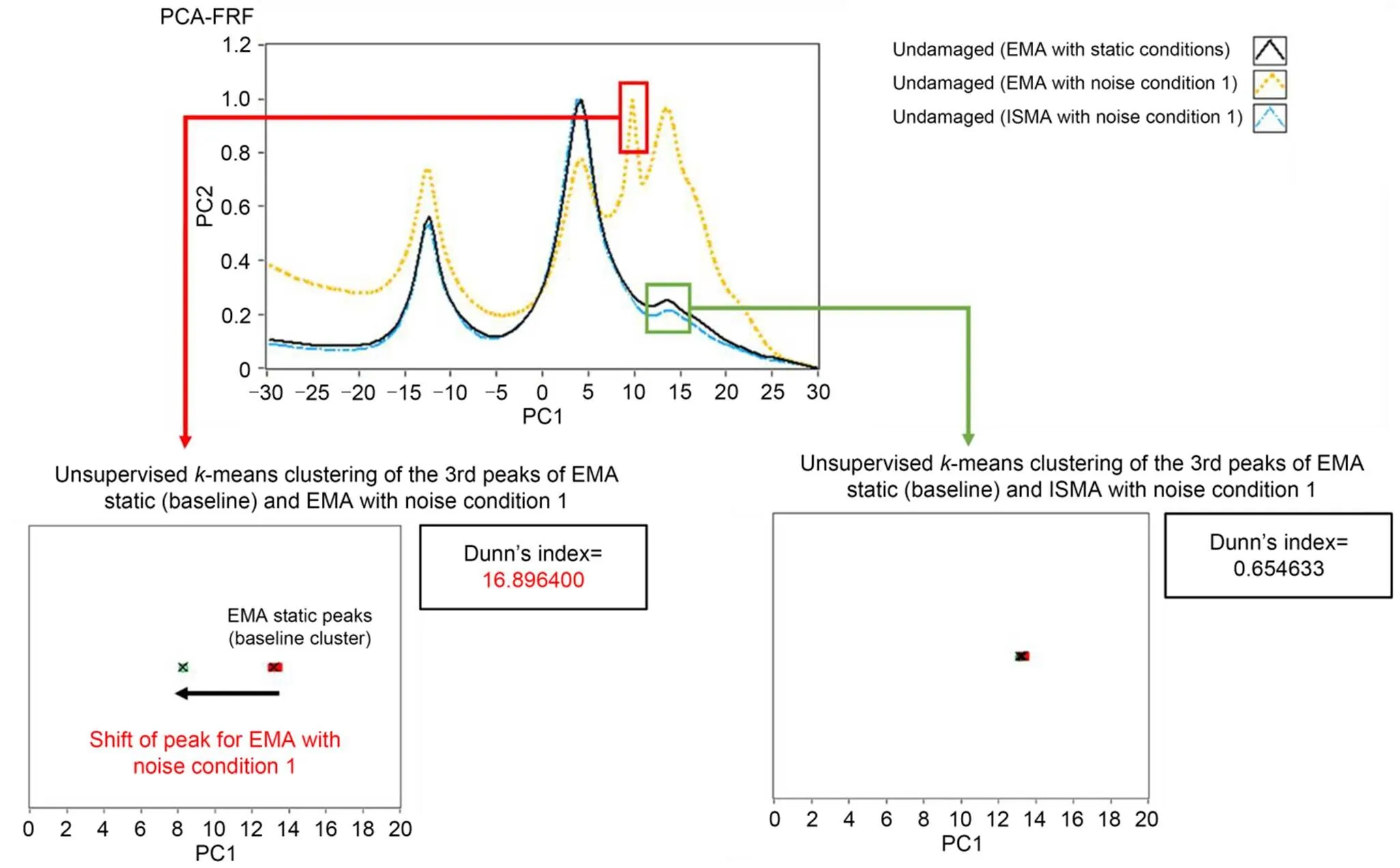
Fig. 13 Overlaid undamaged PCA-FRFs and unsupervised clustering results when EMA and ISMA are performed on a plate-like structure with noise condition 1
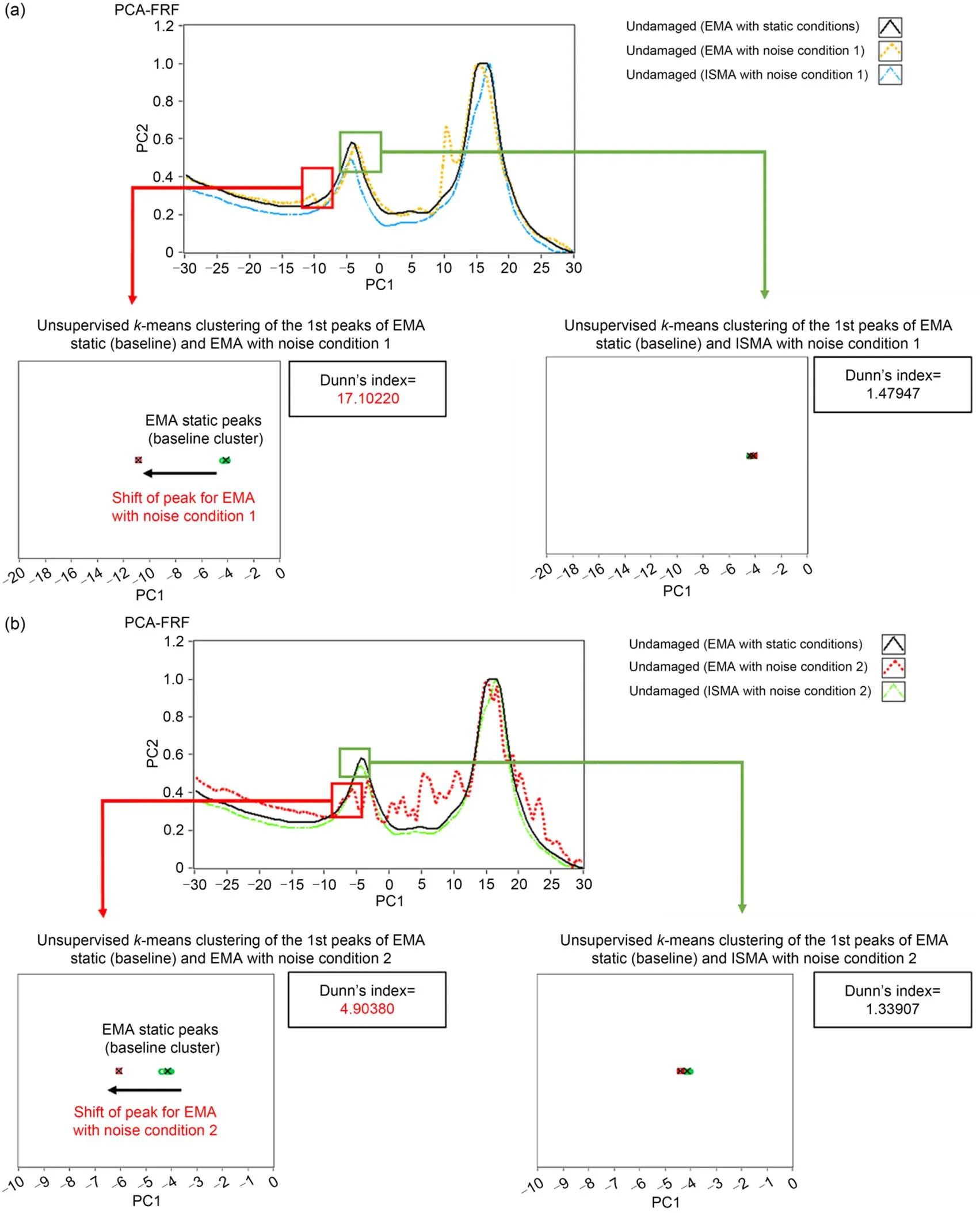
Fig. 14 Overlaid undamaged PCA-FRFs and unsupervised clustering results when EMA and ISMA are performed on a beam-like structure with noise condition 1 (a) and noise condition 2 (b)
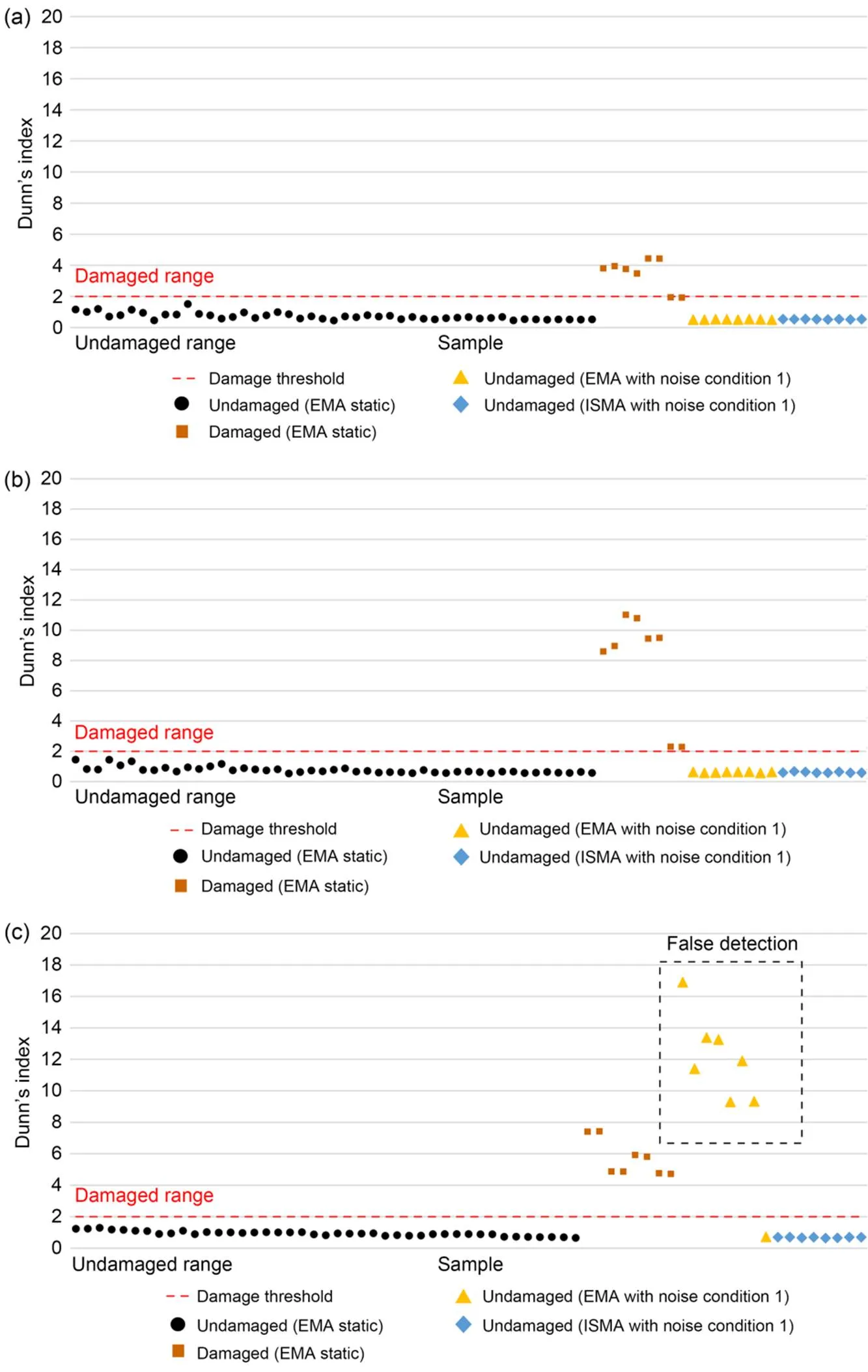
Fig. 15 Dunn's indices for the PCA-FRF peaks 1 (a), 2 (b), and 3 (c) of undamaged and damaged samples of the plate-like structure
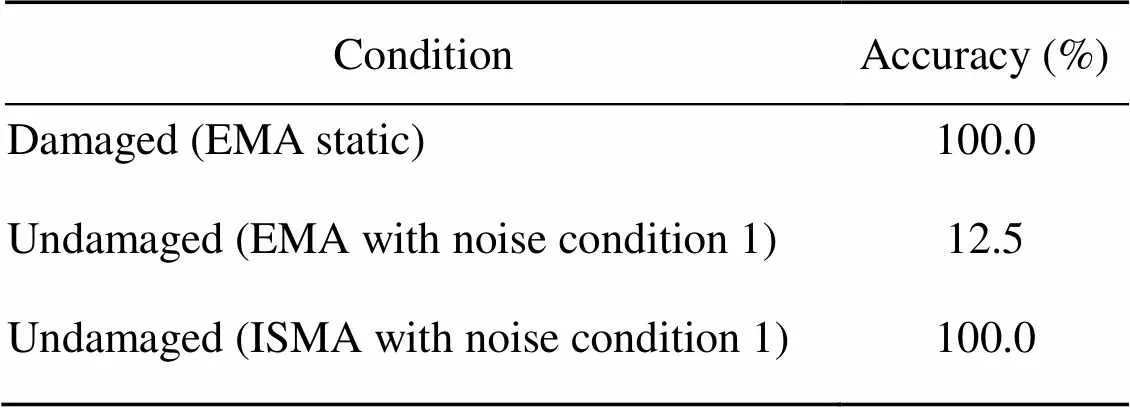
Table 4 Overall results of the unsupervised damage-detection method for the plate-like structure
When noise was induced on the undamaged structure and EMA was performed, false detection was observed; 7 out of 8 sets showed Dunn's index of a peak exceeding the damage threshold. This was due to the sharp peak in the PCA-FRF caused by the noise present as the third peak, which gave the mistaken impression that there was a shift due to damage. The detection accuracy for EMA with noise condition 1 was thus 12.5%; only 1 out of 8 samples was successfully detected as undamaged. However, the structure was detected as undamaged for all ISMA samples with noise condition 1; all samples showed Dunn's index values below the damage threshold, resulting in an accuracy of 100%.
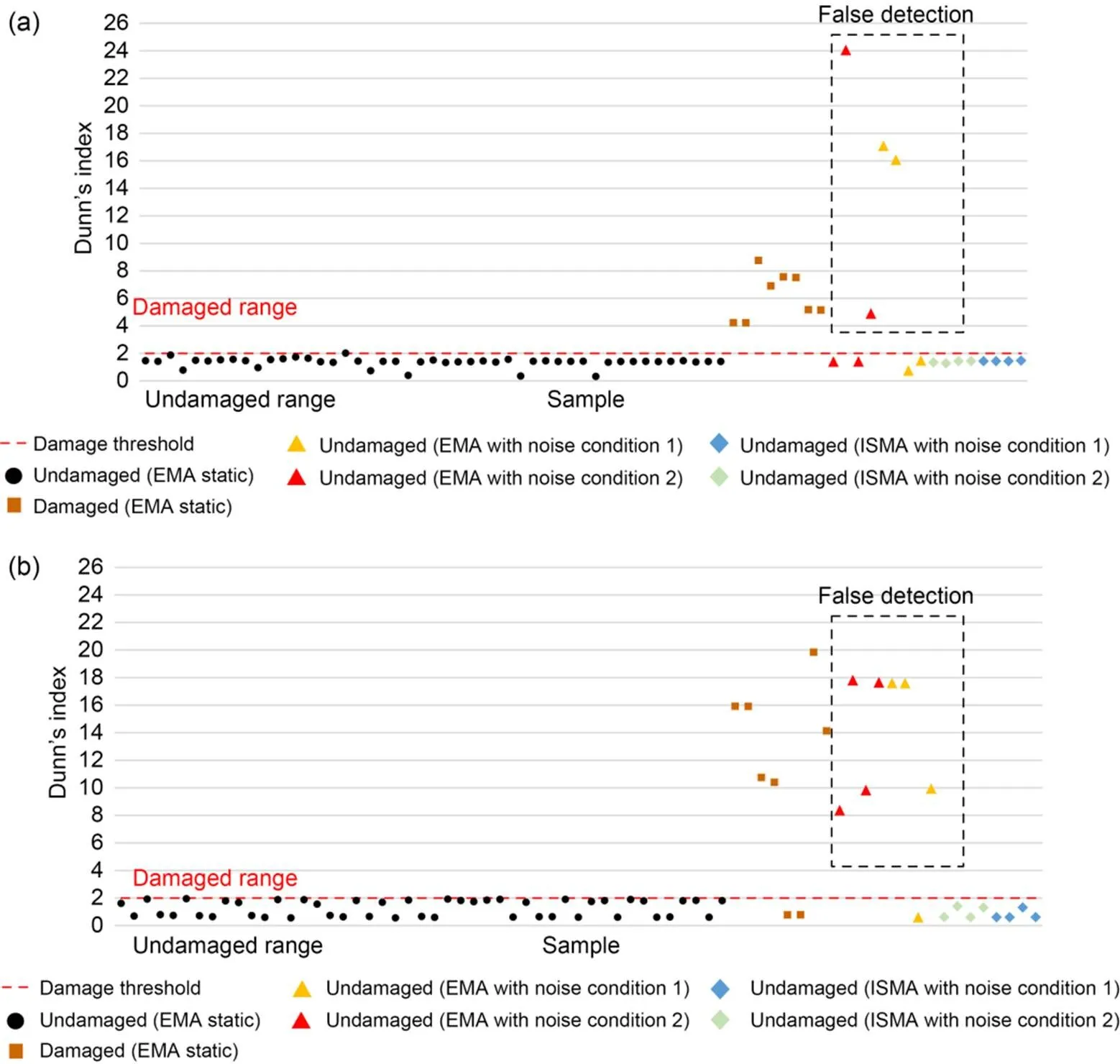
Fig. 16 Dunn's indices for the PCA-FRF peaks 1 (a) and 2 (b) of undamaged and damaged samples of the beam-like structure
When noise was induced on the undamaged structure and EMA was performed, we observed false detection: 7 out of 8 sets showed that Dunn's index of a peak exceeded the damage threshold. The peaks due to noise that were present before the structural modes led to false detection. The detection accuracy for EMA with noise conditions was also 12.5%, and only one sample could be successfully detected as undamaged. When ISMA was performed under noise conditions, all samples could be detected accurately as undamaged and all peaks showed Dunn's index values below the damage threshold. This shows that ISMA permits FRF data collection in noisy environment and on in-service plate-like and beam-like structures; the FRFs would be cleaned up initially before being used for damage detection in an unsupervised manner.
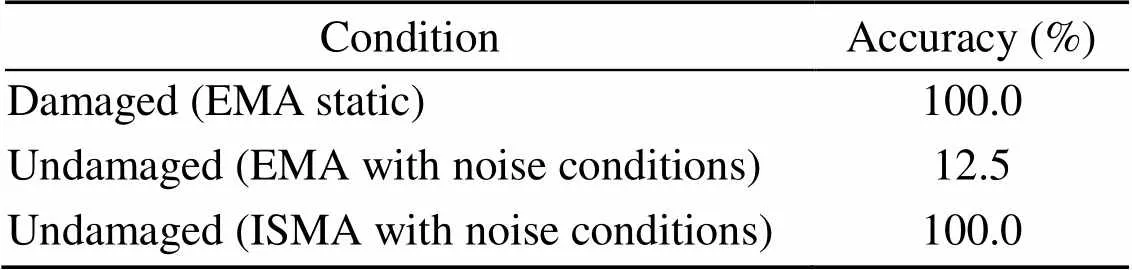
Table 5 Overall results of the unsupervised damage-detection method for the beam-like structure
Based on the overall results, we would like to note that when there is damage, the peaks of the PCA-FRF shift from the undamaged peaks, and the shift of the peaks is detected by the unsupervised-means algorithm. This also applies for multiple damage, in which case there would also be shift in the peaks of the PCA-FRF due to structural stiffness reduction.
5 Conclusions
We proposed a noise-robust damage-detection scheme for operating machinery using the denoising feature of ISMA. Our results show that ISMA can produce static-like FRFs with FRAC and CSAC values greater than 0.9 in general. The noise and cyclic loads or harmonic components can be removed, showing the effectiveness of the denoising approach. We infer that the proposed damage scheme can be performed on a structure without requiring shutdown conditions; it can produce EMA-like or static-like FRFs that only consist of the structural dynamic information for damage assessment. The clean FRFs obtained through ISMA are then processed to generate the PCA-FRF for unsupervised damage detection. The results in our tests showed 100% accuracy when the ISMA's PCA-FRFs were used for unsupervised damage detection for both plate-like and beam-like structures, whereas when EMA was performed under noise conditions, the percentage of error was 87.5% for both plate-like and beam-like structures. This further validates the idea that implementation of ISMA in the proposed scheme aids in the fundamental level of damage assessment. By suppressing the effect of noise, the state of structural health can be correctly determined to avoid false alarms. Thus, we validated that the proposed scheme with ISMA is robust to noise and applicable for operating structures.
Because impact timing is key to achieving effective denoising performance with a minimum number of averages for ISMA, it could be optimized by using an automated impact device known as automated phase controlled impact device (APCID) that has been developed to enable accurate impact timing. However, the device lacks practicality for commercial and industrial use due to its large size and heavy weight. Our team's ongoing research includes the development of a semi-auto impact device, in which machine learning is integrated into the APCID scheme for human-based impact. In addition, future work could include investigation into different types of unsupervised methods for the proposed scheme in order to determine the best-performing algorithm. Optimization of the damage threshold could also be a separate topic for study, and researchers could look at factors such as environmental conditions to further improve the overall proposed damage-detection scheme.
Acknowledgments
This work is supported by the Ministry of Higher Education for the Fundamental Research Grant Scheme (No. FRGS/1/2022/TK10/UM/02/29), the SD Advance Engineering Sdn. Bhd. (No. PV032-2018), the SATU Joint Research University Grant (No. ST020-2020), the Impact-Oriented Interdisciplinary Research Grant (No. IIRG007B-2019) awarded to Zhi Chao ONG, and the Advanced Shock and Vibration Research (ASVR) Group of University of Malaya.
Author contributions
Pei Yi SIOW and Zhi Chao ONG designed the research. Pei Yi SIOW, Shin Yee KHOO, and Kok-Sing LIM processed the corresponding data. Pei Yi SIOW wrote the first draft of the manuscript. Zhi Chao ONG and Shin Yee KHOO helped organize the manuscript. Pei Yi SIOW and Zhi Chao ONG revised and edited the final version.
Conflict of interest
Pei Yi SIOW, Zhi Chao ONG, Shin Yee KHOO, and Kok-Sing LIM declare that they have no conflict of interest.
Bandara RP, Chan THT, Thambiratnam DP, 2014. Frequency response function based damage identification using principal component analysis and pattern recognition technique., 66:116-128. https://doi.org/10.1016/j.engstruct.2014.01.044
Bokaeian V, Khoshnoudian F, Fallahian M, 2021. Structural damage detection in plates using a deep neural network-couple sparse coding classification ensemble method., 27(3-4):437-450. https://doi.org/10.1177/1077546320929156
Bouzenad AE, El Mountassir M, Yaacoubi S, et al., 2019. A semi-supervised based k-means algorithm for optimal guided waves structural health monitoring: a case study., 4(1):17. https://doi.org/10.3390/inventions4010017
Brownjohn JMW, Xia PQ, Hao H, et al., 2001. Civil structure condition assessment by FE model updating: methodology and case studies., 37(10):761-775. https://doi.org/10.1016/s0168-874x(00)00071-8
Chen SL, Ong ZC, Lam WH, et al., 2020. Unsupervised damage identification scheme using PCA-reduced frequency response function and waveform chain code analysis., 20(8):2050091. https://doi.org/10.1142/s0219455420500911
Chen W, Jin MS, Huang JS, et al., 2021. A method to distinguish harmonic frequencies and remove the harmonic effect in operational modal analysis of rotating structures., 161:107928. https://doi.org/10.1016/j.ymssp.2021.107928
Daneshvar MH, Sarmadi H, 2022. Unsupervised learning-based damage assessment of full-scale civil structures under long-term and short-term monitoring., 256:114059. https://doi.org/10.1016/j.engstruct.2022.114059
Das S, Roy K, 2022. A state-of-the-art review on FRF-based structural damage detection: development in last two decades and way forward., 22(2):2230001. https://doi.org/10.1142/s0219455422300014
Elyasi N, Khoshnoudian F, Khoshnoudian Y, 2019. A new damage index for isolated structures., 19(6):1950055. https://doi.org/10.1142/s021945541950055x
Entezami A, Shariatmadar H, 2018. An unsupervised learning approach by novel damage indices in structural health monitoring for damage localization and quantification., 17(2):325-345. https://doi.org/10.1177/1475921717693572
Favarelli E, Testi E, Giorgetti A, 2022. The impact of sensing parameters on data management and anomaly detection in structural health monitoring., 12(6):1413-1425. https://doi.org/10.1007/s13349-022-00566-4
Fleet T, Kamei K, He FY, et al., 2020. A machine learning approach to model interdependencies between dynamic response and crack propagation., 20(23):6847. https://doi.org/10.3390/s20236847
Foti D, Giannoccaro NI, Vacca V, et al., 2020. Structural operativity evaluation of strategic buildings through finite element (FE) models validated by operational modal analysis (OMA)., 20(11):3252. https://doi.org/10.3390/s20113252
Garcia-Perez A, Amezquita-Sanchez JP, Dominguez-Gonzalez A, et al., 2013. Fused empirical mode decomposition and wavelets for locating combined damage in a truss-type structure through vibration analysis., 14(9):615-630. https://doi.org/10.1631/jzus.A1300030
Gillich N, Tufisi C, Sacarea C, et al., 2022. Beam damage assessment using natural frequency shift and machine learning., 22(3):1118. https://doi.org/10.3390/s22031118
Gordan M, Ismail Z, Razak HA, et al., 2020a. Data mining-based damage identification of a slab-on-girder bridge using inverse analysis., 151:107175. https://doi.org/10.1016/j.measurement.2019.107175
Gordan M, Razak HA, Ismail Z, et al., 2020b. A hybrid ANN-based imperial competitive algorithm methodology for structural damage identification of slab-on-girder bridge using data mining., 88:106013. https://doi.org/10.1016/j.asoc.2019.106013
Jayasundara N, Thambiratnam DP, Chan THT, et al., 2020. Locating and quantifying damage in deck type arch bridges using frequency response functions and artificial neural networks., 20(10):2042010. https://doi.org/10.1142/s0219455420420109
Kang J, Liu L, Shao YP, et al., 2021. Non-stationary signal decomposition approach for harmonic responses detection in operational modal analysis., 242:106377. https://doi.org/10.1016/j.compstruc.2020.106377
Khoshnoudian F, Talaei S, 2017. A new damage index using FRF data, 2D-PCA method and pattern recognition techniques., 17(8):1750090. https://doi.org/10.1142/s0219455417500900
Kim JJ, Kim AR, Lee SW, 2020. Artificial neural network-based automated crack detection and analysis for the inspection of concrete structures., 10(22):8105. https://doi.org/10.3390/app10228105
Kouadri A, Hajji M, Harkat MF, et al., 2020. Hidden Markov model based principal component analysis for intelligent fault diagnosis of wind energy converter systems., 150:598-606. https://doi.org/10.1016/j.renene.2020.01.010
Kumar K, Biswas PK, Dhang N, 2020. Time series-based SHM using PCA with application to ASCE benchmark structure., 10(5):899-911. https://doi.org/10.1007/s13349-020-00423-2
Lim HC, Ong ZC, Brandt A, 2018. Implementation of phase controlled impact device for enhancement of frequency response function in operational modal testing., 355(1):291-313. https://doi.org/10.1016/j.jfranklin.2017.11.031
Lim HC, Ong ZC, Ismail Z, et al., 2019. A performance study of controlled impact timing on harmonics reduction in operational modal testing., 141(3):034501. https://doi.org/10.1115/1.4041609
Liu JH, Kizaki T, Ren ZW, et al., 2022. Mode shape database-based estimation for machine tool dynamics., 236:107739. https://doi.org/10.1016/j.ijmecsci.2022.107739
Lydon D, Kromanis R, Lydon M, et al., 2022. Use of a roving computer vision system to compare anomaly detection techniques for health monitoring of bridges., 12(6):1299-1316. https://doi.org/10.1007/s13349-022-00617-w
Ma ZS, Ding Q, Tang Y, 2020. Operational modal analysis of a liquid-filled cylindrical structure with decreasing filling mass by multivariate stochastic parameter evolution methods., 172:105420 https://doi.org/10.1016/j.ijmecsci.2020.105420
Manochandar S, Punniyamoorthy M, Jeyachitra RK, 2020. Development of new seed with modified validity measures for-means clustering., 141:106290 https://doi.org/10.1016/j.cie.2020.106290
Mao JX, Yang CY, Wang H, et al., 2022. Bayesian operational modal analysis with genetic optimization for structural health monitoring of the long-span bridge., 22(5):2250051. https://doi.org/10.1142/s0219455422500511
Nick H, Aziminejad A, 2021. Vibration-based damage identification in steel girder bridges using artificial neural network under noisy conditions., 40(1):15. https://doi.org/10.1007/s10921-020-00744-8
Ong ZC, Lim HC, Khoo SY, et al., 2017. Assessment of the phase synchronization effect in modal testing during operation., 18(2):92-105. https://doi.org/10.1631/jzus.A1600003
Ong ZC, Lim HC, Brandt A, 2018. Automated impact device with non-synchronous impacts: a practical solution for modal testing during operation., 19(6):452-460. https://doi.org/10.1631/jzus.A1700431
Ong ZC, Lim HC, Brandt A, et al., 2019. An inconsistent phase selection assessment for harmonic peaks elimination in operational modal testing., 89(12):2415-2430. https://doi.org/10.1007/s00419-019-01584-3
Ozdagli AI, Koutsoukos X, 2019. Machine learning based novelty detection using modal analysis., 34(12):1119-1140. https://doi.org/10.1111/mice.12511
Padil KH, Bakhary N, Abdulkareem M, et al., 2020. Non-probabilistic method to consider uncertainties in frequency response function for vibration-based damage detection using artificial neural network., 467:115069. https://doi.org/10.1016/j.jsv.2019.115069
Rahman AGA, Chao OZ, Ismail Z, 2011a. Effectiveness of impact-synchronous time averaging in determination of dynamic characteristics of a rotor dynamic system., 44(1):34-45. https://doi.org/10.1016/j.measurement.2010.09.005
Rahman AGA, Ong ZC, Ismail Z, 2011b. Enhancement of coherence functions using time signals in modal analysis., 44(10):2112-2123. https://doi.org/10.1016/j.measurement.2011.08.003
Santos JP, Crémona C, Calado L, et al., 2016. On-line unsupervised detection of early damage., 23(7):1047-1069. https://doi.org/10.1002/stc.1825
Sarmadi H, Entezami A, Salar M, et al., 2021. Bridge health monitoring in environmental variability by new clustering and threshold estimation methods., 11(3):629-644. https://doi.org/10.1007/s13349-021-00472-1
Shin K, 2016. An alternative approach to measure similarity between two deterministic transient signals., 371:434-445. https://doi.org/10.1016/j.jsv.2016.02.037
Siow PY, Ong ZC, Khoo SY, et al., 2021. Damage sensitive PCA-FRF feature in unsupervised machine learning for damage detection of plate-like structures., 21(2):2150028. https://doi.org/10.1142/s0219455421500280
Solimine J, Niezrecki C, Inalpolat M, 2020. An experimental investigation into passive acoustic damage detection for structural health monitoring of wind turbine blades., 19(6):1711-1725. https://doi.org/10.1177/1475921719895588
Svendsen BT, Frøseth GT, Øiseth O, et al., 2022. A data-based structural health monitoring approach for damage detection in steel bridges using experimental data., 12(1):101-115. https://doi.org/10.1007/s13349-021-00530-8
Wan HP, Ni YQ, 2018. Bayesian modeling approach for forecast of structural stress response using structural health monitoring data., 144(9):04018130. https://doi.org/10.1061/(asce)st.1943-541x.0002085
Xie YL, Li BB, Guo J, 2020. Bayesian operational modal analysis of a long-span cable-stayed sea-crossing bridge., 21(7):553-564. https://doi.org/10.1631/jzus.A1900511
Xin Y, Hao H, Li J, et al., 2019. Bayesian based nonlinear model updating using instantaneous characteristics of structural dynamic responses., 183:459-474. https://doi.org/10.1016/j.engstruct.2019.01.043
Zahid FB, Ong ZC, Khoo SY, 2020. A review of operational modal analysis techniques for in-service modal identification., 42(8):398. https://doi.org/10.1007/s40430-020-02470-8
Zahid FB, Ong ZC, Khoo SY, et al., 2021. Inertial sensor based human behavior recognition in modal testing using machine learning approach., 32(11):115905. https://doi.org/10.1088/1361-6501/ac1612
Zhou K, Tang J, 2021. Structural model updating using adaptive multi-response gaussian process meta-modeling., 147:107121. https://doi.org/10.1016/j.ymssp.2020.107121
https://doi.org/10.1631/jzus.A2200620
Revision accepted Jan. 21, 2022;
Crosschecked Aug. 9, 2023
© Zhejiang University Press 2023
Dec. 28, 2022;
 Journal of Zhejiang University-Science A(Applied Physics & Engineering)2023年9期
Journal of Zhejiang University-Science A(Applied Physics & Engineering)2023年9期
- Journal of Zhejiang University-Science A(Applied Physics & Engineering)的其它文章
- Bifurcation control of solid angle car-following model through a time-delay feedback method
- A data-driven approach for modeling and predicting the thrust force of a tunnel boring machine
- Molecular force mechanism of hydrodynamics in clay nanopores
- Theoretical and experimental investigation on the efficiency of a novel roller piston pump
- Finite-time path following control of a sailboat with actuator failure and unknown sideslip angle