
四自由度压电自感知微夹钳的设计
2023-09-20 12:38崔玉国熊志文马剑强杨依领
压电与声光 2023年4期
于 力,崔玉国,熊志文,马剑强,杨依领
(宁波大学 机械工程与力学学院,浙江 宁波 315211)
0 引言
随着各种微零件逐渐集成化和复杂化,操作对象的尺寸已进入微纳操作范围,传统的操作工具已无法满足需求,因此,高精度和高分辨率的微夹钳变得尤为重要[1]。在微装配领域,微夹钳可以完成微零件(微型轴、微型齿轮等)的抓取和搬运操作,与微动平台相结合,还能实现微零件的装配操作[2];在微操作领域,微夹钳可以完成细胞的抓取和释放操作[3]。根据不同的驱动原理,微夹钳包括气动微夹钳[4]、电磁微夹钳[5]、静电微夹钳[6]和压电微夹钳[7-10]等种类。与其他类型的微夹钳相比,压电微夹钳分辨率高,响应速度快,成本较低,广泛应用于微装配和微操作等领域。
根据不同的结构,压电式微夹钳可分为柔顺机构式和单/双晶片式。Liang等[7]研制的微夹钳采用单动爪非对称结构设计,具有三级放大机构,采用两个激光位移传感器分别测量输入、输出位移。在执行器上施加最大电压为10 V梯形电压的情况下,钳指位移达到128.41 μm。Das等[8]研制了一种具有平行抓取技术和三级放大传动机构的微夹钳,微夹钳在150 V、0.2 Hz正弦波驱动下,采用平面镜干涉仪测量得到微夹钳钳指的输出位移为169.2 μm,位移放大比为23.96。Khadraoui等[9]研制了一种单晶片驱动微夹钳,通过外部微位移传感器检测钳指位移,并通过力观测器获取夹持力,完成了对直径∅250 μm导线的抓取任务。Xu[10]研制了一种双晶片压电微夹钳,采用激光位移传感器检测位移和夹持力,位移和力的跟踪误差分别为0.89 μm和3.44 mN。柔顺机构式微夹钳夹持力较大,但需要放大机构放大压电叠层致动器以获取较大的钳指位移,这使微夹钳结构变得复杂。单/双晶片式微夹钳夹持力较小,但结构简单,钳指位移大,体积较小。
综上所述,目前微夹钳的钳指只有一个自由度,整个微夹钳仅有两个自由度,只能完成夹持动作,微夹钳的灵活性不高。另一方面,微夹钳常采用微位移与微力传感器检测钳指位移和夹持力,这些传感器价格昂贵。此外,受空间限制,有的系统无法安装传感器,不便于微装配与微操作系统的应用。
本文将两组空间垂直交叉的逆压电效应作用于同一钳指,设计了一种可沿夹持方向与垂直夹持方向输出位移的四自由度压电微夹钳。同时,基于所提出的积分电荷式位移自感知方法,获取微夹钳的钳指位移。
1 结构设计
1.1 钳指运动原理
图1为两自由度钳指结构,可沿夹持方向(y向)和垂直夹持方向(z向)输出位移。该钳指由上、下压电陶瓷晶片构成,上晶片的非粘结面上有相互绝缘的3个电极,其中左电极、中间电极为驱动电极,右电极为地电极,上晶片的粘结面无电极;下晶片的非粘结面上与上晶片一致,其中中间电极、右电极为驱动电极,左电极为地电极,下晶片的粘结面上仅有中间电极,且该电极为地电极;将上晶片与下晶片粘结,并使上、下晶片的左、中、右电极分别对齐,则可形成钳指。
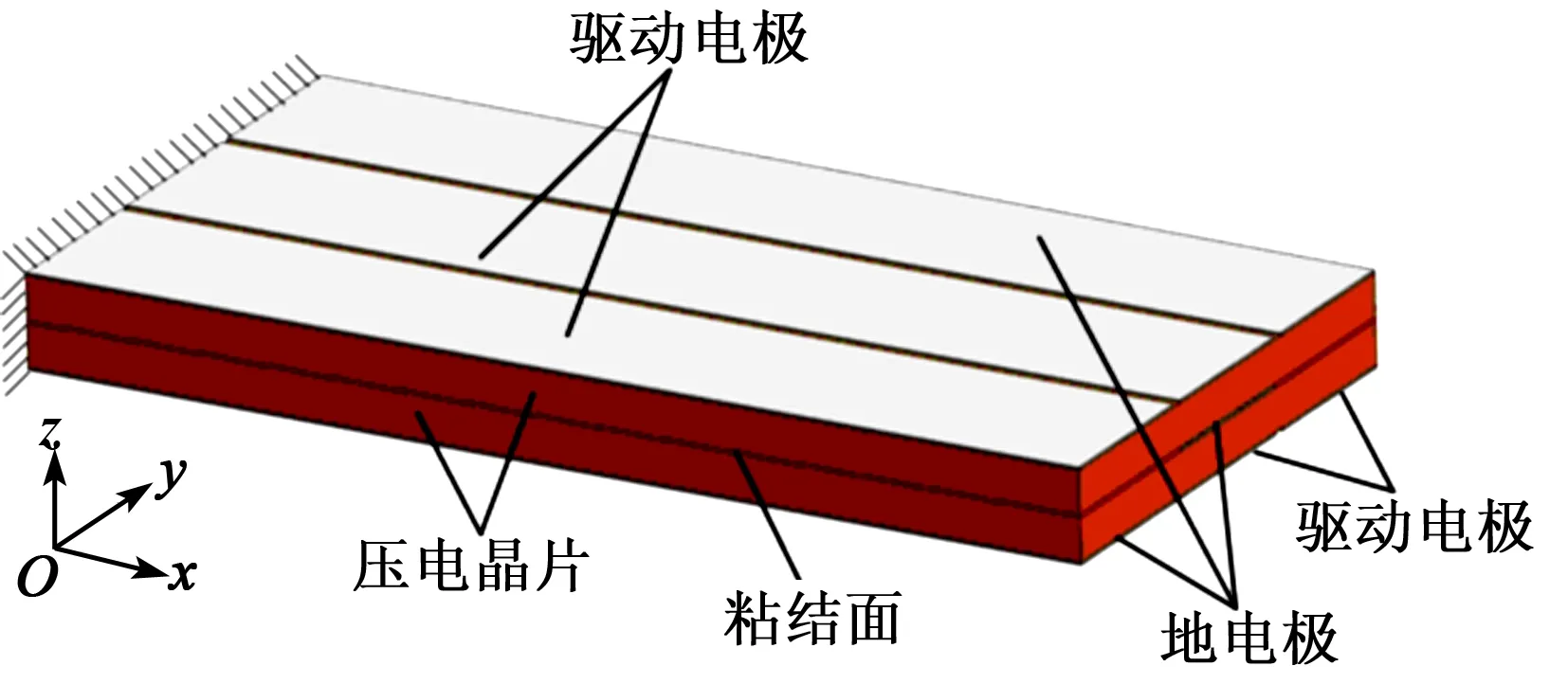
图1 两自由度钳指
图2给出了钳指的截面图,其中晶片极化方向P向上。由图2(a)可知,当在钳指左电极上表面和钳指右电极下表面分别施加驱动电压uy时,左电极电场向下,与极化方向相反,左电极部分将沿图1的+x方向伸长;右电极电场方向向上,与极化方向相同,右电极部分将沿图1的-x方向缩短。在两者同时作用下,钳指便可向夹持方向(图1中+y向)运动,图2(a)中虚线给出了钳指沿夹持方向输出位移后的位置。由图2(b)可知,当在钳指中间电极施加驱动电压uz时,上晶片电场方向向下,与极化方向相反,中间电极部分的上晶片将沿图1的+x方向伸长;下晶片电场方向向上,与极化方向相同,中间电极的下晶片将沿图1的-x向缩短。在两者同时作用下,钳指可向垂直夹持方向(图1中-z向)运动,图2(b)虚线给出了钳指垂直于夹持方向输出位移后的位置。由图2(c)可知,当uy、uz同时作用于钳指时,可使钳指同时沿夹持方向和垂直于夹持方向运动。由此可见,1个钳指具有2个自由度,而由2个钳指构成的微夹钳则具有4个自由度。
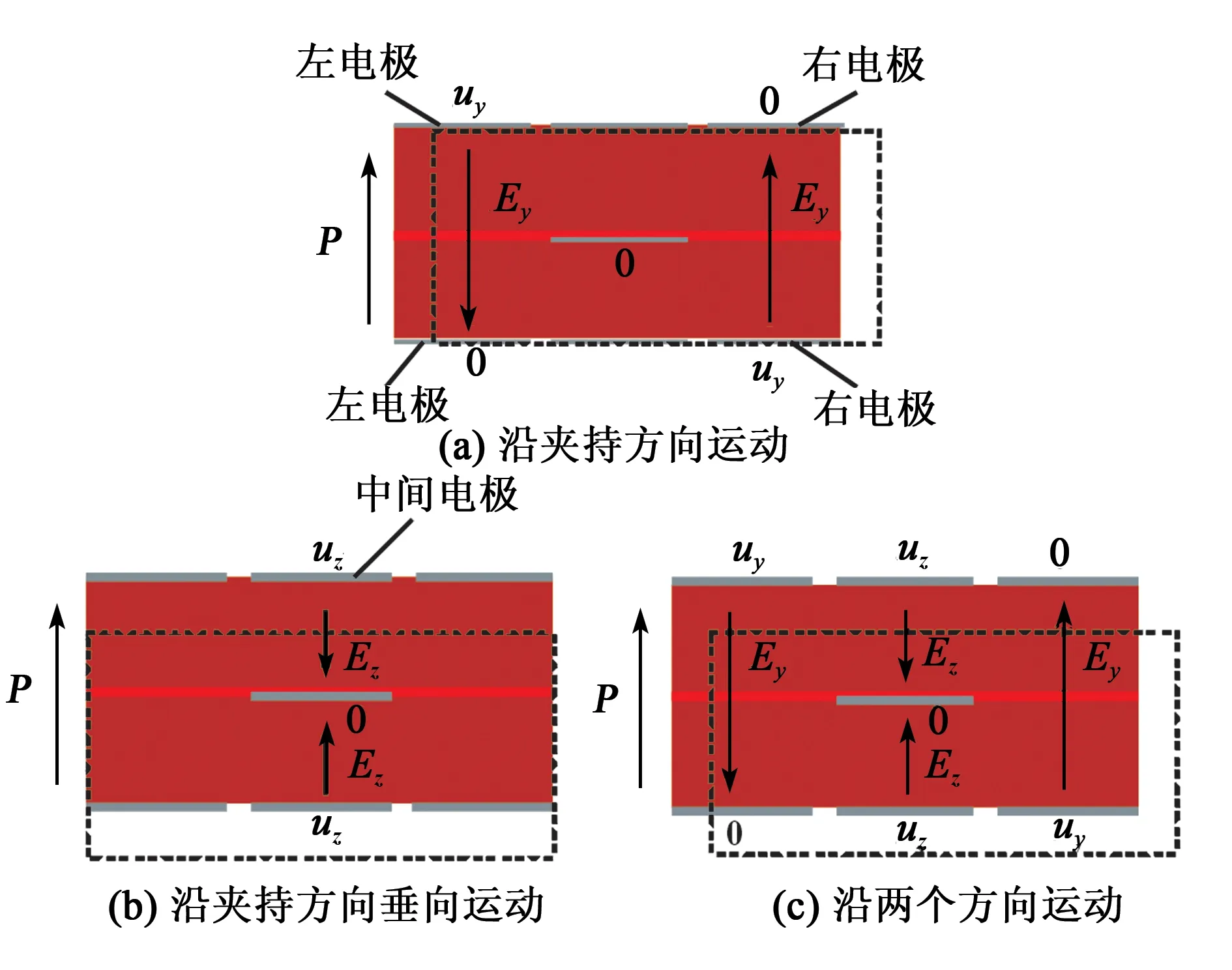
图2 钳指运动原理
1.2 微夹钳结构
图3为四自由度压电微夹钳结构。它由呈夹钳状的上、下压电陶瓷晶片构成,每片晶片包括支撑部和钳指,支撑部用于固定微夹钳以及引出钳指电极;上晶片有切口,用于引出下晶片粘接面上的电极。上、下晶片的非粘接面上有电极及其引出区,上晶片粘接面上的电极在晶片极化后被去除,下晶片粘接面上仅有中间电极及其引出区,其余电极在晶片极化后被去除。压电微夹钳整体尺寸为50 mm×14.5 mm×0.8 mm。
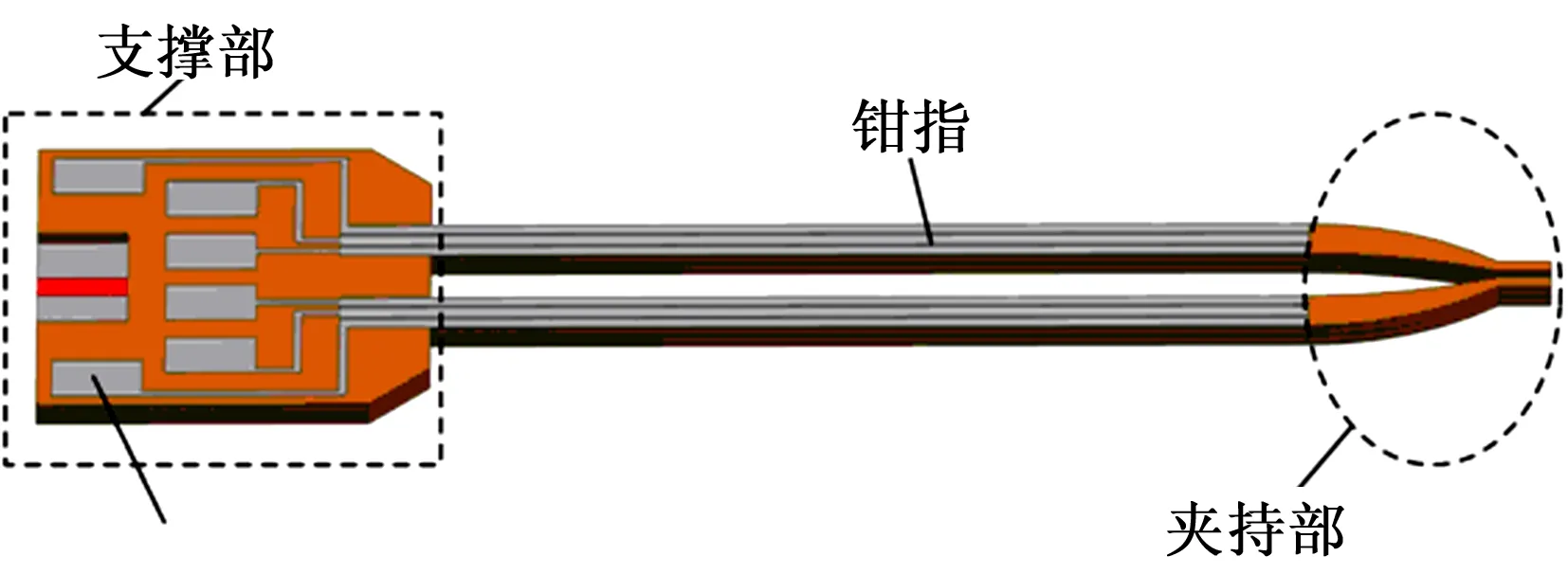
图3 四自由度压电微夹钳
2 钳指位移自感知原理
2.1 钳指位移与晶片表面电荷的关系
压电执行器在驱动电压u作用下会发生变形,当其输出端不受约束时,该变形成为压电执行器的输出位移δ,压电执行器在变形的同时,其晶片还会发生电极化,从而在晶片表面产生电荷Q。δ与u的关系以及Q与u的关系,根据压电材料的逆压电效应、介电效应可分别表示为
δ=au
(1)
Q=Cpu
(2)
式中:a为位移-电压系数;Cp为压电执行器的电容。
根据式(1)、(2)可得δ与Q的关系为
δ=αQ
(3)
式中α=a/Cp为位移-电荷系数。
由式(1)、(2)可得钳指在电压作用下沿夹持方向和垂直于夹持方向的位移与钳指表面电荷之间的关系分别为
(4)
(5)
式中:δy、Qpy、ay、Cpy分别为夹持方向的钳指位移、表面电荷、位移-电压系数及钳指左、右电极覆盖部分的等效电容;δz、Qpz、az、Cpz分别为垂直夹持方向的钳指位移、表面电荷、位移-电压系数及钳指中间电极覆盖部分的等效电容。
2.2 晶片表面电荷的获取方法
压电微夹钳钳指晶片表面电荷为束缚电荷,需通过相应的电路将其变成自由电荷。图4为钳指位移自感知电路。图中,A为运算放大器,K为手动开关;Rk为限流电阻,upy、uoy为夹持方向的输入电压和输出电压,upz、uoz为垂直夹持方向的输入电压和输出电压,Rpy、Cy、Ry为微夹钳夹持方向的等效电阻、积分电容和反馈电阻,Rpz、Cz、Rz为微夹钳垂直夹持方向的等效电阻、积分电容和反馈电阻,ipy、iCy、iRy为夹持方向上钳指、积分电容和反馈电阻的电流,ipz、iCz、iRz为垂直夹持方向上钳指、积分电容和反馈电阻的电流。
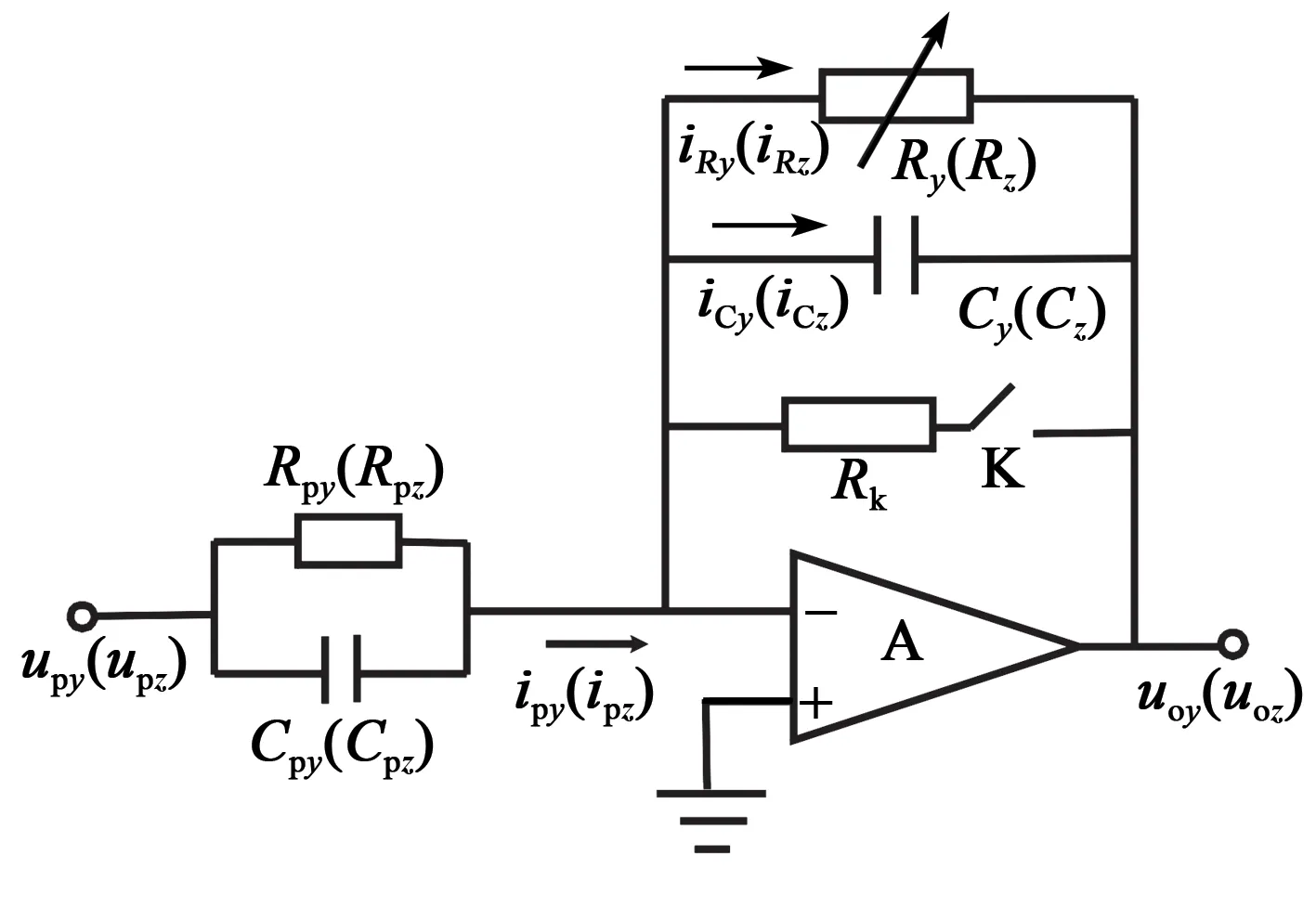
图4 自感知电路
对于夹持方向,积分电路的输出电压可表示为

(6)
若:
(7)
则:
Cpyupy=-Cyuoy
(8)
式(8)表明,钳指表面的电荷Cpyupy等于积分电容Cy上的电荷Cyuoy,即钳指表面的自由电荷可通过Cy获得。
由式(7)、(8)可得:
CpyRpy=CyRy
(9)
由式(2)可知,夹持方向的钳指表面自由电荷可进一步表示为
Qpy=Cpyupy=-Cyuoy
(10)
将式(10)代入式(4),微夹钳沿夹持方向的自感知位移可表示为
(11)
同理,垂直于夹持方向的钳指自感知位移可表示为
(12)
在式(11)、(12)中,ay、az、Cpy、Cpz、Cy、Cz是已知的,而uoy、uoz可通过自感知电路获得,所以钳指沿夹持方向及其垂向的位移均可通过所提出的自感知方法获得。
3 实验验证
3.1 测试系统构成
图5为对钳指位移进行自感知验证的实验系统。它由计算机、数据采集卡、驱动电源、压电微夹钳、激光位移传感器、自感知电路构成。
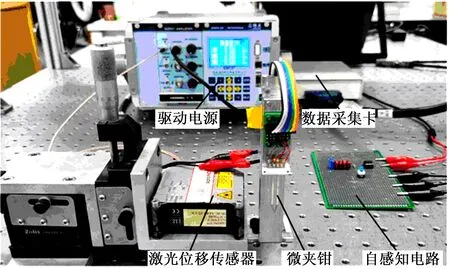
图5 位移自感知测试系统
3.2 自感知验证
3.2.1 静态位移
给钳指左、右电极施加上升与下降时间均为10 s、最大值为150 V(即图2中uy为150 V)的三角波驱动电压;给钳指中间电极施加上升和下降时间均为5 s、最大值为75 V(即图2中uz为75 V)的三角波驱动电压。图6为三角波作用下的钳指实测位移与自感知位移。由图可知,由激光位移传感器测得的左、右钳指沿夹持方向的最大位移分别为66.31 μm、66.27 μm,由自感知电路获得的最大自感知位移分别为65.93 μm、66.27 μm;由激光位移传感器测得的左、右钳指垂直于夹持方向的最大位移分别为62.89 μm、63.29 μm,由自感知电路获得的最大自感知位移分别为62.68 μm、62.73 μm。因此,所设计的四自由度压电微夹钳沿夹持方向及其垂向均具有良好的位移输出特性,且自感知位移与实测位移具有良好的一致性。
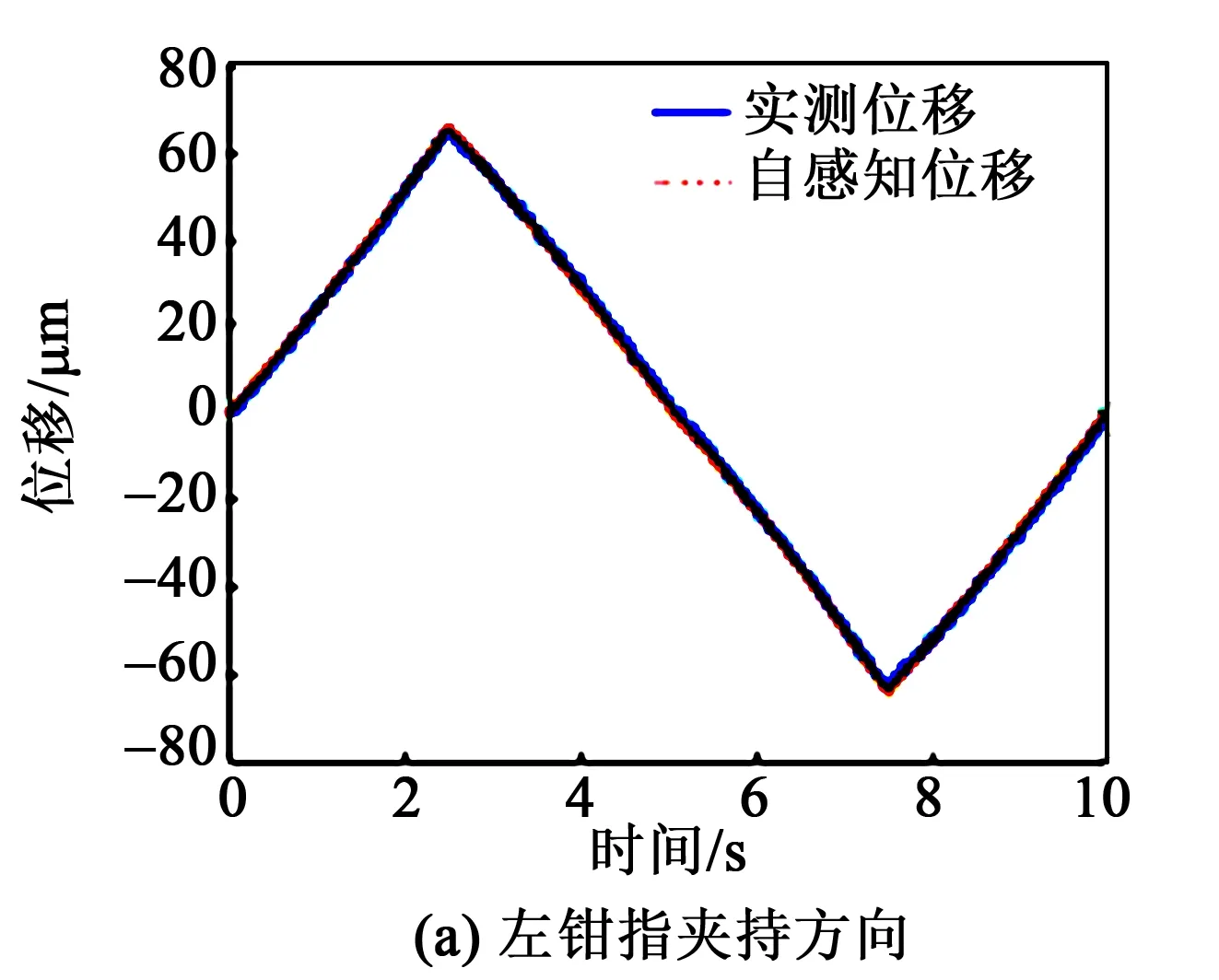
图6 三角波作用下的钳指实测位移与自感知位移
3.2.2 阶跃响应
给钳指左、右电极施加上升时刻为第1 s、持续作用时间为9 s、幅值为50 V(即图2中uz为50 V)的阶跃驱动电压,给钳指中间电极施加上升时刻为第1 s、持续时间为9 s、幅值为25 V(即图2中uz为25 V)的阶跃电压。图7为阶跃响应作用下的钳指实测位移与自感知位移。由图可知,左、右钳指沿夹持方向的实测位移的稳态值分别为21.27 μm、21.47 μm,响应时间分别为0.22 s、0.21 s,自感知位移的稳态值分别为21.02 μm、21.19 μm,响应时间分别为0.22 s、0.21 s;左、右钳指垂直于夹持方向的实测位移的稳态值分别为 20.28 μm、20.16 μm,响应时间分别为0.20 s、0.21 s,自感知位移的稳态值分别为20.15 μm、19.97 μm,响应时间均为0.21 s。因此,所设计的四自由度压电微夹钳沿夹持方向及其垂向均具有良好的动态响应特性,即使在动态情况下,自感知位移同实测位移仍具有良好的一致性。
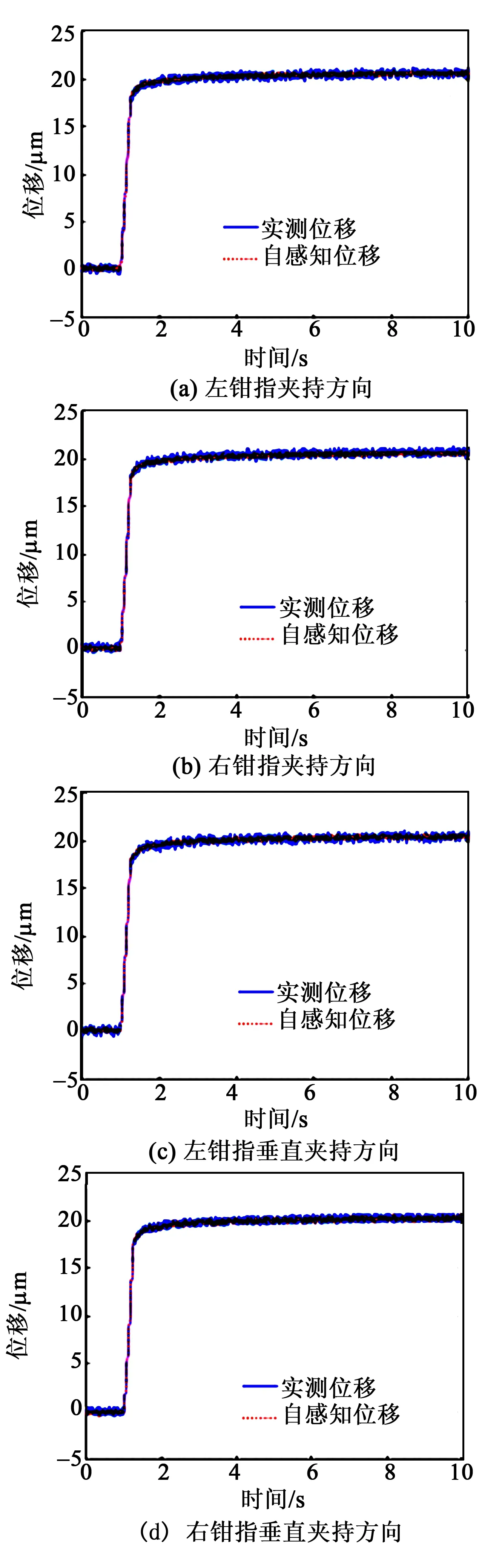
图7 阶跃响应作用下的钳指实测位移与自感知位移
4 结束语
本文将空间垂直交叉的两组逆压电效应作用于同一钳指,设计了一种四自由度压电微夹钳新构型。根据压电晶片在电压作用下发生变形的同时在其表面产生电荷的思想,提出了基于积分电荷的钳指位移自感知方法。实验结果表明,本文设计的四自由度压电微夹钳沿夹持方向及其垂向均具有良好的静动态特性,所提出的自感知方法能够较为准确地获取钳指位移。
猜你喜欢
锻压装备与制造技术(2022年1期)2022-03-24
装备制造技术(2020年2期)2020-12-14
中国特种设备安全(2019年2期)2019-04-22
压电与声光(2019年1期)2019-02-22
测控技术(2018年8期)2018-11-25
制造技术与机床(2018年11期)2018-11-23
铜仁学院学报(2018年6期)2018-07-05
电子世界(2016年22期)2016-03-12
超硬材料工程(2016年1期)2016-02-28
振动、测试与诊断(2014年6期)2014-03-01
