
超高时空分辨显微成像技术研究进展*
2023-09-19 01:59韦芊屹倪洁蕾李灵张聿全袁小聪闵长俊
物理学报 2023年17期
韦芊屹 倪洁蕾 李灵 张聿全 袁小聪 闵长俊
(深圳大学微纳光电子学研究院,射频异质异构集成全国重点实验室,纳米光子学研究中心,深圳 518060)
高分辨显微成像技术为人们推开了探索微观世界的大门,而飞秒激光技术又为人们提供了一把探测超快物理/化学现象的尺子.将这两者结合,发展既有超高空间分辨、又有超快时间分辨的新型显微成像技术,对于人们探索极小时空尺度下新的科学现象和规律有非常重要的意义.本文综述了目前国际上主要超高时空分辨显微成像技术的基本原理和特点,并介绍了其在光电材料与器件表征、飞秒激光微加工监测、表面等离激元动力学表征等方面的最新应用进展.超高时空分辨显微成像技术的发展,不仅推动了光学显微成像领域的进步,也为精密加工、二维材料动力学、光电器件设计与表征等领域提供了关键技术手段,具有广阔的应用前景.
1 引言
21 世纪以来,纳米技术、芯片科技、新材料、生物医药等新兴领域的迅猛发展,为人类社会进步起到了重要推动作用.为了在这些领域形成技术突破,亟需深入了解和揭示其物理、化学现象背后的微观超快变化过程和机理,因此具有超高空间、时间分辨能力的显微成像技术成为了当今科学界的一个重要研究方向.
在空间分辨方面,光学显微镜的发明让人类能以近乎无损的方式观测微观世界,为生物、医学、物理、化学、材料等领域的发展打开了一片崭新的天地,已成为当今人类观察生命过程、物质结构的关键手段.然而受制于衍射极限[1],传统远场光学显微镜的空间分辨率仅能达到半个波长量级.因此,近些年来,许多能够突破衍射极限、实现超分辨的远场光学显微成像技术成为最受关注的光学研究前沿之一.多种新颖的远场超分辨光学显微成像技术被陆续提出,例如: 受激发射损耗显微成像技术(stimulated emission depletion,STED)[2]、随机光学重建显微成像技术(stochastic optical reconstruction microscopy,STORM)[3]、光激活定位显微成像技术(photo-activated localization microscopy,PALM)[4]、结构光照明显微成像技术(structure illumination microscopy,SIM)[5]、超分辨光学涨落显微成像(super-resolution Optical Fluctuation Imaging,SOFI)[6]、基于最小光子数的纳米尺度定位技术(MINFLUX)[7]等.2014 年诺贝尔化学奖就颁给了“超分辨荧光显微成像技术”的三位发明人,以表彰他们在超分辨显微成像领域的杰出贡献,标志了科学界对该领域的广泛关注与认可.此外,有别于远场光学显微技术,近场光学显微技术通过纳米尺度探针来探测物体表面近场范围内的倏逝场信息[8],例如近场扫描光学显微镜(nearfield scanning optical microscopy,NSOM)[9]等,也可以突破衍射极限,得到远小于入射光波长的精细结构信息.除了光学方式外,借助电子波长较短的特性,电子显微镜同样也是提高显微镜成像分辨率的重要手段,例如扫描电子显微镜(scanning electron microscope,SEM)[10]、透射电子显微镜(transmission electron microscope,TEM)[11]、扫描透射电子显微镜(scanning transmission electron microscope,STEM)[12]等.
在时间分辨方面,自1960 年Maiman 发明了世界上第一台激光器以来,激光技术快速发展,激光脉宽也逐渐被压缩至飞秒甚至阿秒量级.其中啁啾脉冲放大技术因为在高能量超短脉冲产生中的重要作用[13],入选了2018 年诺贝尔物理学奖.超快激光的应用涉及很多科学技术的前沿,包括微纳米尺度三维微结构制备[14,15],超快X 射线衍射[16,17],飞秒激光太赫兹波技术[18,19],飞秒激光成丝[20,21],阿秒脉冲的产生与测量[22-24],超快非线性光学[25,26],高次谐波产生[27,28],飞秒光镊操控[29,30]等.由于飞秒激光具有超短的脉冲持续时间,可以用来探测物理、化学体系中的超快现象,并将这些现象随时间的动态演化过程表征出来[31-35].例如诺贝尔化学奖得主、加州理工大学Zewail 研究组[32]成功地将飞秒时间分辨探测技术应用于化学分子反应的超快过程研究,为研究分子结构动力学[33]、光合作用超快过程[34]、分子受激拉曼散射[35]等发生在飞秒尺度的超快过程提供了有效的技术手段.
近些年来,原子与分子尺度科学已成为国际重要研究前沿.这一层面的几乎所有运动与变化在空间上是纳米尺度,在时间上是超快过程.揭示其微观过程和机理并进行有效调控,将为推动科技、产业与经济发展奠定基础.因此,光学显微成像技术的发展呈现出“更小更快”的趋势,即不但要能对更小空间尺寸的样品成像,还要具有更快的时间分辨率.为了应对这一重要挑战,近年来人们将具有空间高分辨的显微成像技术与飞秒激光超快时间分辨探测技术相结合,发展出多种具有超高时空分辨能力的显微成像技术[26,67,86],对于探索极小时空尺度下新的科学现象和规律、推动相关光电材料/器件与产业的发展都具有非常重要的意义.
本文综述了国内外超高时空分辨显微成像技术的研究进展.为了系统性地介绍这些研究工作,我们将相关技术从空间、时间这两个维度进行了划分和归类: 在空间维度上,划分为依赖纳米尺寸探针在样品表面近场区域探测的近场成像、以及远离样品表面进行探测的远场成像;在时间维度上,划分为需要重复脉冲测量的多脉冲成像、以及单脉冲成像.本文第 2 节为相关技术原理及特性介绍,包括: 2.1 节介绍了基于纳米探针的近场多脉冲时空显微成像技术,2.2 节介绍了远场多脉冲时空显微成像技术,2.3 节介绍了远场单脉冲时空显微成像技术.第3 节介绍了高时空分辨显微成像技术在光电材料/器件中的载流子转移、飞秒激光微加工监测、表面等离激元动力学表征等领域的应用研究进展.最后,第4 节总结了各技术的指标及优缺点,并对未来发展趋势进行了展望.
2 超高时空显微成像技术与原理
2.1 近场多脉冲时空显微成像
现在较为成熟的近场显微成像技术包括NSOM[9]、原子力显微镜(atomic force microscopy,AFM)[40]、扫描隧穿显微镜(scanning tunneling microscope,STM)[43]等,这些技术都依赖纳米尺度探针在物体表面近场范围内的扫描测量,因此具有超越衍射极限的空间分辨率.人们将这些近场成像技术与飞秒泵浦-探测技术相结合,发展出了多种同时具有空间超分辨以及飞秒时间分辨的显微成像技术[37,42,46].需要注意的是,由于近场成像一般要求探针逐点扫描,而每个点都需要至少一次脉冲来激发信号,所以需要许多个脉冲重复测量才能完成最终成像.这就要求所探测的现象具有可重复性,不适合对随机的、可能产生破坏的过程进行成像,因此其应用范围会受到一定限制.
2.1.1 基于NSOM 的时空显微成像
近场扫描光学显微镜(NSOM)利用探针-样品距离控制技术[9],将亚波长尺度的探针针尖,进入到样品表面的近场区域,将表面的非辐射倏逝场转变为可传播的辐射场,再由远场的探测器接收,从而获得包含在倏逝场中的超分辨信息,最终通过探针在近场的逐点扫描获得空间超分辨的样品二维图像.
2007 年,北京大学龚旗煌、张家森团队[36]在国内率先将近场扫描光学显微镜与飞秒泵浦-探测技术相结合,成功建立了飞秒时间分辨近场光学显微成像系统,如图1(a)所示.由于NSOM 本身信号较弱,结合飞秒时间分辨技术后信噪比会进一步降低.为此,他们通过高频声光调制器对泵浦光和探测光进行调制,并利用差频锁相探测提高信噪比,获得了80 nm 的空间分辨和小于200 fs 的时间分辨率,并利用该系统展现了金纳米颗粒不同位置下热电子弛豫动力学的差异.

图1 (a) 飞秒近场扫描显微成像系统示意图以及延迟时间0,500 fs 和2 ps 时的近场泵浦-探测信号[36];(b) 利用tr-NSOM 对WSe2进行的时间分辨纳米尺度探测实验[37]Fig.1.(a) Schematic representation of the femtosecond near-field scanning microscopy imaging system and the near-field pumpprobe signal at the time delay of 0,500 fs and 2 ps[36];(b) time resolved infrared nano-imaging experiments on WSe2 by using tr-NSOM[37].
国际上,利用飞秒泵浦-探测技术与NSOM 结合而发展的超快时间分辨扫描近场光学显微镜(time-resolved near-field scanning optical microscopy,tr-NSOM)近年来也得到广泛关注和发展[37-39],已成为研究纳米材料近场光学现象的重要手段.2020 年,美国哥伦比亚大学 Sternbach 等[37]利用tr-NSOM 研究了WSe2纳米片中飞秒脉冲引起的复杂光诱导变化,如图1(b)所示.实验中使用的NSOM 针尖可以实现20 nm 的空间分辨率,图中展示了稳态以及功率为2.5 mW 的泵浦进行激发后Δt=1 ps 时刻下的近场图像,并在亚皮秒时间尺度上记录了WSe2相干动力学,以及在10 ps 的时间尺度上记录了非相干激子漂白现象.
2.1.2 基于AFM 的时空显微成像
在对样品的表面形貌进行超分辨成像时,经常用到原子力显微镜(AFM)[40].AFM 依赖于悬臂梁的共振力学运动,能够探测针尖与样品表面的力的变化,实现在纳米尺度下材料形貌的高分辨率成像.
由于AFM 获得的主要是形貌信息,需要进一步研究尖端-样品间相互作用,如探测光引起的化学、物理或光谱特征的变化,才能间接获得纳米材料的近场光学性质.光诱导力显微镜(photo-induced force microscopy,PiFM)便是一种将AFM 和光诱导力探测结合的新型近场光学显微镜.在PiFM 中,镀有金属膜的AFM 针尖尖端与样品经光诱导发生极化,针尖偶极子与样品中的偶极子相互作用产生光诱导力.由于产生的光诱导力包括梯度力和散射力,而其中梯度力对分子极化率敏感,因此PiFM 可以通过探测光诱导力变化来检测样品的光诱导分子极化率,从而最终得到样品的光场分布.其信号的产生和测量都是在近场中进行的,可以达到小于10 nm 的空间分辨率,实现超分辨测量[41].
将PiFM 的高空间分辨与飞秒泵浦-探测技术相结合,是获得超高时空分辨成像的方法之一.其空间分辨率由PiFM 的空间分辨率决定,时间分辨率由飞秒泵浦-探测脉冲到达样品上的脉冲宽度决定.2015 年,美国加州大学Jahng 等[42]提出了基于PiFM 的超快泵浦-探测光诱导力显微镜(timeresolved photo-induced force microscopy,tr-PiFM).他们将泵浦和探测光束分别进行振幅调制,使得分子与泵浦光和探测光的连续相互作用对光诱导力产生调制,再将悬臂机械运动调谐至与光诱导力运动相匹配,即可获得光诱导力产生的图像,成像系统如图2(a)所示.他们利用tr-PiFM 研究了SiNc 材料的激发态动力学,记录了不同时间延迟下单个分子簇的图像,如图2(b)—(e)所示.图2(f)比较了tr-PiFM 探测的力学信号和远场下的泵浦-探测时间分辨信号,可以清楚地看到,力学信号和光学检测信号显示出相同的动力学特性,证明tr-PiFM 所测量到的动力学过程具有可靠性.这项工作证明了以光诱导力方式探测纳米材料的超快非线性光学响应的可行性,实现了小于10 nm的空间分辨率和飞秒量级的时间分辨率.
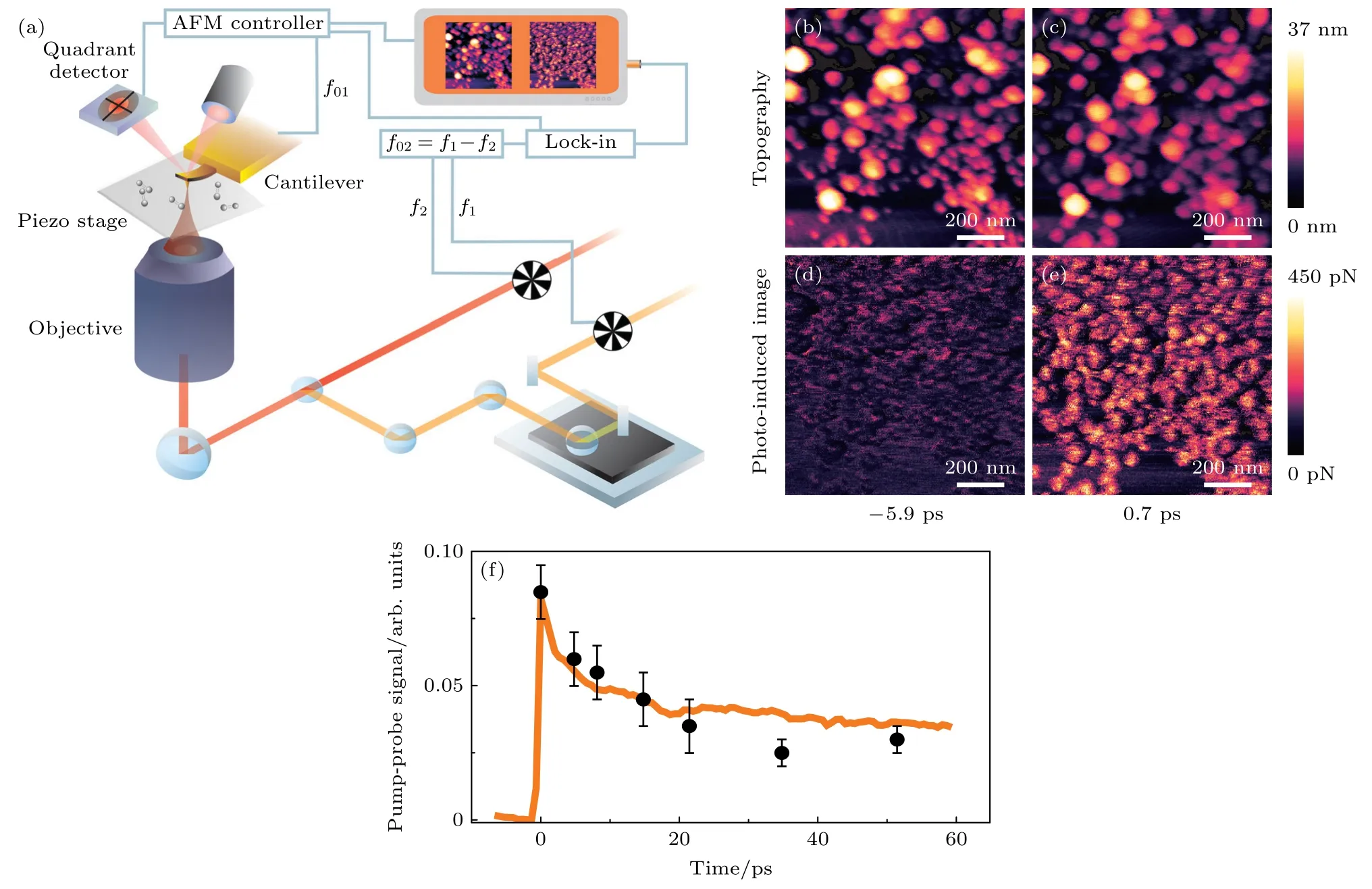
图2 (a) tr-PiFM 系统示意图[42];在两个不同时间延迟(—5.9 和0.7 ps)下AFM 所记录的(b),(c)形貌图和(d),(e)光诱导力图像[42];(f)比较远场检测到的泵浦-探测信号(橙色实线)和光诱导力信号(黑色圆点)[42]Fig.2.(a) Schematic of the tr-PiFM system[42];topography image (b),(c) and optical force image (d),(e) are simultaneously recorded at negative time delay 5.9 ps (or positive time delay 0.7 ps) [42];(f) comparison between the far-field detected pump-probe signal (orange solid line) and the tr-PiFM signal (black circle dot)[42].
表面等离激元(surface plasmon polariton,SPP)是一种新型的光学表面波,其具有波长远小于入射波长的特点,因此用于成像时可以轻松地突破衍射极限.利用飞秒激光结合SPP 用于近场光学扫描成像一直是研究人员的重要研究目标之一.2016 年,美国科罗拉多大学Kravtsov 等[26]利用刻蚀有亚波长光栅的金纳米针尖耦合飞秒激光脉冲的方法,在AFM 针尖尖端处产生了非线性四波混频效应与飞秒SPP 纳米聚焦现象,并利用其实现了粗糙金膜上不同热点处飞秒SPP 相干动力学过程的超快成像,如图3 所示.他们将飞秒激光脉冲(800 nm,10 fs)聚焦到刻蚀有亚波长光栅结构的金探针侧面,光栅激发的SPP 脉冲沿探针传播并会聚到针尖位置,在针尖形成高度局域化的增强光场,产生非线性四波混频(four-wave mixing,FWM)效应,最后将三阶非线性光学信号散射到远场进行探测,成像系统示意图如图3(a)所示.他们将针尖增强四波混频成像与飞秒泵浦探测技术相结合,对粗糙金膜进行成像,同时获得AFM 图像和针尖增强四波混频成像(图3(b),(c)所示),分别探测了延迟时间为0,8.2,16.4 fs 下金膜表面不同位置处SPP 热点的瞬态动力学信息(图3(d)所示),最终实现了50 nm 的成像空间分辨率和10 fs 的时间分辨率.该工作为超快近场显微镜和光谱学研究提供了高灵敏度的纳米探针设计方案,在超快和多维全光近场光谱成像方面有重大应用价值.

图3 (a) 超快FMW 成像系统示意图,经过脉冲整形系统后的飞秒脉冲通过刻蚀在金针尖上的光栅激发SPP 并聚焦到针尖的顶点[26];(b) 硅-金膜表面SPP 热点S1,S2,S3 位置对应的FWM 扫描图像[26];(c) 每个热点对应的AFM 形貌图像[26];(d) 金膜中SPP热点动力学的飞秒FWM 纳米成像,对应热点在不同延迟时间下的相对强度变化[26]Fig.3.(a) Schematic of the ultrafast FMW imaging experiment,the femtosecond pulse after the pulse shaping system excited the SPP through a grating etched on the gold tip and focused to the vertex of the tip[26];(b) near-field FWM image of a Si-Au step,showing SPP “hotspots” S1,S2 and S3[26];(c) simultaneously acquired AFM topography[26];(d) FWM nanoimages of the SPP “hotspots” dynamics of a Si-Au surface,corresponding to different inter-pulse delay,demonstrating evolution of the relative intensities in spots S1,S2 and S3[26].
2.1.3 基于STM 的时空显微成像
STM 是一种可以达到原子级别空间分辨率的近场扫描成像技术[43].其基本原理是将一根针尖放置在离样品很近(<1 nm),但是不接触的距离,并在样品上施加偏压,则可以在针尖-样品上测量到一个很微弱的电流,称为隧穿电流或隧道电流,此电流反映了表面电子态的信息.STM 具有极高的空间分辨率,其横向分辨率可达1 Å[43].2020 年,中国科学技术大学罗毅教授团队[44]利用尖端增强的STM,以8 Å的空间分辨率展示了单个酞菁分子与纳米腔等离激元耦合的光致发光成像.
STM 虽然具有良好的空间分辨能力,但受限于前置放大器的带宽,其时间分辨能力非常有限.通过与超快光学技术相结合,可以使STM 突破前置放大器带宽的限制,实现原子/分子尺度分辨率的超快时空成像.
2004 年,Takeuchi 等[45]设计了一套精密的STM 时空分辨显微系统.2010 年,Terada 等[46]基于该方案获得了首个超快时间分辨的STM 结果,其原理如图4(a)所示,将光分成具有一定光程差的两束光入射,此时所激发表面的隧穿电流可以表示为光程差的函数.对这两束光的光程差施加一个周期性调制,则所产生的的隧穿电流也会受到相应周期的频率调制,若用锁相放大器对该周期信号进行放大,就能反映出所产生的电流与相差之间的关系,该关系直接反映了表面电子态超快过程的时间寿命.同时,由于两束光的光程差所对应延迟时间远大于激光脉宽,即使加了调制,照射在针尖上的总光强也是不变的,此时针尖的热膨胀会趋于一个恒定值,不会影响隧穿电流的测量[45].此外,Terada等[46]对Takeuchi 等[45]方案中的周期调制方法进行了一些改进,将机械式的脉冲选择改为通过一脉冲选择器实现,可以通过改变加载在其上的电压,再通过偏振片选择,来精准控制脉冲的通断,从而将重复频率90 MHz 的脉冲光筛成重复频率为1 MHz 的脉冲光.他们基于这个系统对GaAs 结构表面的Co 纳米粒子的空穴产生和复合进行了实空间直接分析,通过超短激光脉冲激发出非平衡载流子分布,并结合泵浦-探测技术通过STM 观察其弛豫过程,实现了纳米量级的空间分辨率以及皮秒量级的时间分辨率,所得到的结果如图4(b)—(e)所示.从图4(b)—(e)可以看出,该系统观察到了纳秒范围内超快弛豫过程.

图4 (a) Terada 等[46]所提出的时间分辨STM 工作原理图;(b) 实空间上GaAs 样品表面Co 纳米颗粒的STM 形貌图[46];(c) 图(b)中不同位置的空穴捕获率测量结果[46];(d) 图(b)与图(c)的图象叠加[46];(e) 空穴捕获率与Co 纳米颗粒尺寸的依赖关系[46]Fig.4.(a) Schematic of the time-resolved STM proposed by Yasuhiko Terada[46];(b) STM topography of Co nanoparticles on the surface of GaAs samples in real space[46];(c) hole capture rate measurements at different locations in Fig.(b) [46];(d) superposition of Fig.(b) and Fig.(c) [46];(e) size dependence of hole capture rate[46].
2.2 远场多脉冲时空显微成像
与近场显微成像相比,远场成像只能收集物体衍射出的信息,因此空间分辨率受到衍射极限的影响,但其具有非侵入性、非接触、宽视场、可实时成像等优点,因此在许多领域都有广泛的应用.
为了提升光学远场成像的空间分辨率,研究人员提出了许多方法.例如为了进一步增大数值孔径(numerical aperture,NA)而发明的水浸、油浸、固浸物镜[47,48],这种方法虽然实现了分辨率的提升,但并没有突破衍射极限.能够突破衍射极限的远场显微成像技术也取得了许多突破,除了先前提到的STED,STORM,PALM,SIM 以外,还包括微球透镜[49]、超透镜[50]等以收集倏逝波[51-53]为基础的超分辨成像技术.将其与飞秒泵浦-探测技术相结合,可以在远场成像的情况下,获得超越衍射极限的空间分辨率以及飞秒量级的时间分辨率.
2.2.1 基于高NA物镜的时空显微成像
提升光学显微镜空间分辨率的一个重要手段,就是依据衍射极限规律,使用更大数值孔径的物镜.2012 年,Domke 等[54]将飞秒泵浦-探测与光学显微镜相结合,通过两种不同的时间延迟技术得到了超长时间范围的飞秒激光脉冲刻蚀薄钼膜的完整过程图像,延迟时间可以覆盖从飞秒到微秒量级.在飞秒到纳秒的延迟时间内,泵浦-探测之间的光程差使用光学延迟线进行调控,获得了小于840 fs的时间分辨率;而在纳秒到微秒的时间内,使用皮秒脉冲进行探测,并用电子延迟来获得纳秒级别的时间分辨率.系统的空间分辨率由所使用光学显微镜的数值孔径决定,所使用物镜的NA=0.29,获得了1.22 µm 的空间分辨率.
2017 年,华东师范大学贾天卿团队[55]将飞秒泵浦-探测技术与高NA的光学显微镜(100×,NA=0.9)结合,观测了飞秒激光诱导金膜表面亚波长周期性条纹结构(laser-induced period surface structures,LIPSS)的形成过程,并用表面等离激元的热效应解释了LIPSS 结构生长过程中的一系列现象,实现了300 nm 的空间分辨率和1 ps 的时间分辨率.实验原理如图5(a)所示,一束泵浦脉冲用于诱导金膜表面产生周期性结构,另一束探测脉冲则聚焦到厚10 mm 的水室中,在非线性效应的影响下产生400—1000 nm 的白光脉冲,用短通滤波器过滤出波长400—550 nm 的部分,这决定了实验的时间分辨率为1 ps 左右.探测脉冲通过延迟线调控与泵浦脉冲之间的光程差,来获取泵浦脉冲到达样品后不同时刻的表面图像.CCD 所收集到的图像如图5(b)所示,展示了泵浦脉冲入射后20—3000 ps 时间范围内金膜表面的瞬态LIPSS 的产生过程.

图5 (a) 飞秒泵浦-探测显微镜实验装置示意图[55];(b) 在20—3000 ps 之间一系列延迟时间点内,单个泵浦脉冲辐照样品表面的光学显微照片[55]Fig.5.(a) Schematic of femtosecond pump-probe microscopy setup[55];(b) optical micrographs of sample surface irradiated by the single pump pulse observed at the delay time of 20—3000 ps[55].
2.2.2 基于多帧结构光照明的时空显微成像
结构光照明显微成像 (SIM)[5]是一种远场超分辨显微成像技术,其实现超分辨的原理可以通过图像的空间频谱来解释.在一般光学显微镜中,显微镜的空间分辨率取决于它能采集到信号的最大空间频率,当样品的高频信息高于显微镜的衍射极限时,这部分信息就无法通过.如图6(a)所示,两个高频条纹叠加时会因为莫尔效应产生低频条纹,基于同样的原理,如果采用高空间频率的结构光场(例如光学干涉条纹)来照明样品,就可以将样品超衍射极限的高频信息移至光学成像系统可探测的低频区域,从而得到样品的高频信息.此外,为了复原样品的真实频谱分布,需要将探测得到的各频谱分量分离,再将其分别还原至原有位置,最后通过计算处理得到超分辨的样品图像[56].一般常见的图像还原做法是在条纹结构光照明时引入至少三步相移,再分别拍摄三个不同方向,合计拍摄9 张原始图像,才能重构出1 张超分辨图像.

图6 (a) 莫尔现象及SIM 实现超分辨原理[56];(b) 基于DMD 的结构光照明泵浦-探测成像系统光路图;(c) 左侧分别为硅纳米线样品的SEM 图像、SPPM 成像、传统光学显微成像,右侧为SPPM 成像与传统光学显微成像分辨率对比、SPPM 泵浦-探测获得样品不同位置的载流子弛豫过程[59]Fig.6.(a) Moire phenomenon and the SIM principle of super-resolution[56];(b) schematic of DMD-based structured pump—probe microscope[59];(c) the left side: SEM image,SPPM image,and image by conventional optical microscopy of silicon nanowire samples respectively;the right side: the carrier relaxation process at different positions of SPPM imaging and conventional optical microscopy imaging resolution and SPPM pump-probe[59].
如果不借助非线性效应[57],SIM 技术的空间分辨率最多能在衍射极限基础上提高1 倍[56],但是其不需要逐点扫描样品,可大范围成像,具有快速、超分辨、宽场成像的显著优点.目前,借助于高速空间光调制器(spatial light modulator,SLM)、数字微镜器件(digital micro-mirror device,DMD)等设备最高上万帧/秒的切换速度,SIM 技术的时间分辨已经可以达到毫秒至亚毫秒量级[58].若将SIM 技术与飞秒泵浦-探测技术相结合,理论上可以获得具有飞秒时间分辨、空间超分辨、宽场成像特性的显微成像技术.
2016 年Massaro 等[59]首次将飞秒泵浦-探测技术与SIM 相结合,提出了一种结构光泵浦-探测显微镜(structured pump-probe microscopy,SPPM),用于硅纳米线的载流子动力学研究,如图6(b)所示.实验中使用中心波长为800 nm 的泵浦光,用于激发硅纳米线的载流子运动.倍频之后的400 nm光作为探测光,并用DMD 编码产生结构光条纹图案.探测脉冲在空间上与泵浦场相匹配,并对硅纳米线样品进行空间扫描,来获得特定时间延迟下的探测图像.他们使用具有不同初相位的三张图像进行重建,使得结构光泵浦-探测显微成像的空间分辨率达到114 nm,约为1/4 波长,突破了衍射极限.图6(c)展示了延迟时间Δt=0 ps 时传统光学显微成像以及SPPM 成像结果对比,以及SPPM所获得的纳米线不同位置0—200 ps 时间范围内载流子弛豫过程结果.
2.2.3 基于单帧傅里叶变换轮廓术的时空显微成像
2022 年,深圳大学袁小聪、闵长俊团队[60]将飞秒泵浦-探测技术和基于单帧结构光条纹的傅里叶变换轮廓术(Fourier transform profilometry,FTP)相结合,提出并实现了一种单脉冲结构光探测、无需多步相移的宽场时空显微镜(single-probe structured light microscopy,SPSLM).与上述SIM技术不同的是,SIM 需要在原始图像采集时引入三步相移,至少需要三个方向上的9 张原始图像,才能重建出一张超分辨图像,不适用于不可逆的超快过程成像.SPSLM 在成像时利用傅里叶变换轮廓术(FTP)算法,只需要一张结构光照明的原始图像即可重建出样品表面的三维高度信息.FTP 是一种只需要单帧图像的三维成像技术[61,62],虽然还受衍射极限影响,不能像SIM 那样实现超分辨,但无需多步相移,方法简便,已广泛应用于工业检测、机器视觉等宏观应用[63,64].基于几何光学的三角剖分方法[65],被测样品的高度被认为与FTP 计算的相位线性相关,通过三角法解出样品的相位信息,再通过相位-高度关系最终可以重建样品的三维表面形貌[62].
利用SPSLM 系统可以对飞秒激光烧蚀过程进行探测,系统光路如图7(a)所示.其中飞秒激光器中心波长为800 nm 部分作为泵浦光,通过BBO晶体倍频之后的400 nm 脉冲作为探测光.SPSLM最大的特点是结构光离轴照明,这为FTP 的三角测量方法创造了条件.如图7(a)所示,探测光束经过DMD 后,产生多个衍射级数.通过位于4f-系统(L3 和L4)共焦平面上的光孔,选出+1 级和0 级光干涉,产生具有结构光条纹的探测脉冲.图7(b)展示了用该系统拍摄的单脉冲烧蚀硅表面从0 到2.5 ps 的形貌演变.其中第一行是原始探测图像,第二行是通过FTP 算法重建的表面高度图.SPSLM 技术实现了478 nm 的空间横向分辨率和22 nm 的纵向分辨率,以及256 fs 的时间分辨率.虽然SPSLM 技术无法达到和SIM 一样的超衍射极限分辨,但是具有三维成像、不需要多步相移的优点,提高了成像速度,适用于激光加工过程中材料表面形貌超快变化的表征与研究.

图7 (a) SPSLM 系统示意图及光路图,其中红色和紫色分别代表泵浦光和探测光[60];(b)单个泵浦光脉冲烧蚀硅表面从0 到2.5 ps 采集到的原始图像及重建得到的表面形貌演化图[60]Fig.7.(a) Schematic of the SPSLM,where color red and color violet indicate pump light and probe light respectively[60];(b) raw images and the reconstructed surface evolution height maps collected from 0 to 2.5 ps[60].
2.2.4 基于PINEM 的时空显微成像
因为电子波长比光要短很多,电子显微镜天然的就比光学显微镜有更高的空间分辨率.电子显微镜与超快激光结合,同样也是实现高时空分辨率成像的重要手段.超快透射电子显微镜(ultrafast transmission electron microscopy,UTEM)是 一种将超快泵浦-探测技术与透射电子显微镜(TEM)相结合而发展出来的技术[66],这项技术提供了可视化原子量级物体瞬态的能力,能够研究更快的动力学过程,已成为表征物理、化学、材料科学和生物学中动态过程的有力工具.其原理是通过一束飞秒泵浦光激发样品,另一束飞秒探测光进入电子枪激发探测电子脉冲,然后电子脉冲再入射到样品,对样品进行电子显微镜的成像.控制泵浦光脉冲、探测电子脉冲两者到达样品的时间差,就能获得样品被泵浦光激发后不同时刻的超快动力学成像.电子脉冲具有和飞秒激发光相当的脉宽,因此系统的时间分辨率主要由飞秒激光器的脉宽决定.
由UTEM 发展而来的光诱导近场电子显微镜(photon-induced near-field electron microscopy,PINEM)可以以高时空分辨率直接观察表面等离激元近场结构,能够实现飞秒量级的时间分辨率和原子量级的空间分辨率.PINEM 名称中的近场(near-field)主要是指获取的是近场信息,其探测方式仍然是利用电子显微镜远离样品表面进行探测,所以成像方式仍然是远场的.2009 年,PINEM 由加州理工大学Ahmed H.Zewail 教授团队[67]首次提出,并实现了光诱导碳纳米管倏逝场的超快演化成像,如图8(a)所示.在纳米碳纳米管上,近场的脉冲光电子通过吸收或发射单个或多个散射光子来进行调制.通过对这些调制后的脉冲电子进行能量滤波,可以直接在空间中成像近场电场分布,再通过调节泵浦-探测脉冲的延迟时间,获得飞秒时间尺度上的电场动力学过程.
近年来,国内科研团队在PINEM 领域也有不少研究成果.2021 年,中国科学院物理研究所李建奇教授团队[68]利用PINEM 实现了飞秒脉冲激发银纳米线表面等离激元的近场时间分辨成像,并分析了不同偏振激发下的等离激元近场分布,如图8(b)所示.他们使用波长515 nm 的飞秒脉冲作为泵浦脉冲激发样品的表面等离激元振荡,再使用波长257 nm 的飞秒脉冲驱动钨丝发射超快脉冲光电子作为探测脉冲,并通过调节两者的延迟时间,得到时间分辨电子能量损失谱(electron energy loss spectroscopy,EELS)图像.2022 年,南开大学付学文教授团队[69]利用PINEM 观测到了银膜上飞秒激光诱导的表面等离激元分布及动力学过程,实验原理及观测到的超快动力学结果如图8(c)所示.实验使用波长为515 nm 飞秒激光诱导银膜表面等离激元,通过只选择吸收光子能量的电子进行能量过滤成像,直接观测到了表面等离激元的空间分布,并通过改变入射激光的偏振方向研究了PINEM强度的偏振依赖性.研究发现与纳米线、纳米棒等结构的偏振依赖性不同,激光偏振方向的改变不会影响银膜上的PINEM 强度.
2.2.5 基于PEEM 的时空显微成像
光发射电子显微镜(photoemission electron microscopy,PEEM)是一种基于光电效应的显微镜.其通过入射光子激发材料表面电子,将携带表面信息的电子通过电磁透镜系统,收集并聚焦到二维电子成像探测器的焦平面上来成像,具有光子激发-电子探测的工作方式,PEEM 的空间分辨率可以达到5.4 nm[70],缩短了与扫描电子显微镜分辨率之间的距离.随着超快科学的发展和技术进步,时间分辨光发射电子显微镜(time-resolved photoemission electron microscopy,tr-PEEM)将飞秒激光的超高时间分辨和PEEM 的超高空间分辨结合,从而同时具有超高时间和空间分辨能力,在研究微纳尺度表面和界面超快动力学过程方面有独特优势.其时间分辨率由超快激光系统决定,空间分辨率由tr-PEEM 的电子显微系统决定.tr-PEEM 的空间分辨率受到电子光学固有的色差和球面像差的限制,在相差校正系统中可以达到10 nm[71].需要说明的是,tr-PEEM 技术与上文提到的PINEM技术都利用电子显微镜进行成像,两者区别在于:PINEM 是飞秒探测光先进入电子枪激发出电子脉冲,电子脉冲再入射到样品进行探测;而tr-PEEM是飞秒探测光直接入射到样品,激发出样品的光电子进行探测.
tr-PEEM 按照泵浦光和探测光的波长是否相同,可以分为干涉泵浦-探测技术和双色泵浦-探测技术[72,73],如图9(a)所示[74].干涉泵浦-探测技术中的泵浦光和探测光为完全相同的两个脉冲,可通过马赫-曾德干涉仪(Mach-Zehnder interferometer,MZI)产生,并通过调节MZI 其中一路的延迟线,改变泵浦-探测时间延迟.激光光源一般为20 fs或10 fs 以下的超短脉冲,并采用高精度的压电平移台作为延迟线.干涉泵浦-探测技术常用于研究表面等离激元(SPP)等的超快动力学过程.双色泵浦-探测技术一般采用中心波长不同的两个脉冲,如: 中心波长800 nm 的基频光和其三倍频光分别作为泵浦光和探测光.双色泵浦-探测常用于研究材料激发态载流子的弛豫动力学过程,并根据所研究材料的能带结构和关注的物理过程,选择合适的泵浦-探测光波长组合.

图9 (a) tr-PEEM 两种泵浦-探测光路类型[74];(b) Ag 光栅上的四个局部SPP 的ITR-PEEM 结果.泵浦和探测脉冲之间的延迟时间(τd) 从—0.33 fs 增加到40.69 fs,步长为0.33 fs[78];(c)通过tr-PEEM 拍摄了在光激发后,InSe/GaAs 异质结构中的电子随时间的积累(红色)和耗尽(蓝色)等转移过程[79]Fig.9.(a) Two pump-probe schematic of tr-PEEM[74];(b) ITR-PEEM of the four localized plasmons on the silver grating framed.The delay time between the pump and probe pulses (τd) is advanced from —0.33 to 40.69 fs with an increment step of 0.33 fs[78];(c) electron transport over time in the InSe/GaAs heterostructure showing the initial accumulation (red) and eventual recombination (blue) after photoexcitation[79].
2005 年,美国匹斯堡大学Kubo 等[78]首次将干涉时间分辨双光子光发射(interferometric twophoton time-resolved photoemission,ITR-2PP)技术[75]与PEEM 技术[76,77]相结合,对银光栅上飞秒激光脉冲(400 nm,10 fs)激发SPP 的超快过程进行了研究,获取了具有深亚波长空间分辨率(50 nm)和亚飞秒时间精度(0.33 fs)的SPP 脉冲激发及传播过程探测,如图9(b)所示.这为纳米结构/器件中超快SPP 的动态过程研究提供了新方法.
近年来,基于超快PEEM 的成像技术发展迅速.2017 年,冲绳理工大学Man 等[79]通过将飞秒泵浦-探测技术与光谱光电子显微镜相结合,对II型二维InSe/GaAs 材料异质结构中光激发电子从高能到低能态的运动进行了成像,如图9(c)所示.在光激发瞬间,能量分辨光电子图像显示出光载流子在空间和能量上的高度非平衡分布.之后,在非平衡光载流子的作用下,电荷的空间再分布,从而形成内部电场,弯曲半导体带,最终阻碍进一步的电荷转移.通过将不同延时拍摄的图像组合在一起,得到了100 ps 内的运动过程,揭示了光激发II 型异质结构中的电子转移过程.
2.2.6 基于泄露模辐射的时空显微成像
泄露模辐射显微镜(leakage radiation microscopy,LRM)是一种对界面上传播的表面等离激元(SPP)等倏逝波进行成像的远场光学显微成像方法.SPP 在金属薄膜表面传播的过程中,会有一部分能量泄露进衬底之中,通过检测其泄露模式可以定量成像和分析SPP 在金属薄膜上的传播,国际上已经有大量利用LRM 对SPP 成像的研究报道[80-82].若将LRM 与飞秒激光技术相结合,就能以飞秒量级时间分辨率成像SPP 脉冲波包运动,研究SPP 波包的特性,例如群速度和相速度等.
2016 年,法国Ebbesen 团队[83]利用结合飞秒激光空间外差干涉方法的LRM,实现了金属膜表面单个SPP 波包传播的时间分辨观测,并通过干涉信息计算出SPP 传播的群速度和相速度.所使用的方案如图10(a)所示,在马赫-曾德干涉仪中插入一个LRM,在该干涉仪的输入端,单束飞秒激光脉冲分为参考脉冲与SPP 激发脉冲两束.其中一束用于从上方激发金膜表面的SPP 信号,再通过高NA油浸物镜(图10(a)中O2)收集SPP的泄露辐射信号.然后,该泄露模脉冲与来自干涉仪另一支臂的参考脉冲相结合,当两个脉冲在时间和空间上重叠时,可以在CMOS 相机中观察到干涉图像,两个脉冲间的时间延迟可以通过光学延迟线进行控制.结果如图10(b)所示,展示了延迟时间为190 fs 下干涉输出的图像及其强度的横切曲线.

图10 (a) 通过飞秒LRM 成像SPP 波包运动的实现系统光路图[83];(b) 延迟时间为190 fs 时CMOS 相机采集到的干涉图像[83];(c) 不同时刻下(200,230,260 fs)实验中获得的泄露模干涉图与理论值(绿色虚线)的比较,用于表征SPP 波包运动[83]Fig.10.(a) Implementation of femtosecond LRM imaging SPP wave packet[83];(b) LRM image recorded on the CMOS camera at the output of the interferometer for a time delay of 190 fs[83];(c) SPP wave packet motion of experimental time-resolved interferograms obtained by LRM cross-cut images for the different time delays of 200,230 and 260 fs,compared with the theoretical values(green dashed line)[83].
实验中所测量得到不同时刻下的泄露模干涉图像如图10(c)所示,表征了200,230 和260 fs 三个时刻下的SPP 波包传播情况,并与理论模拟曲线(绿色虚线)吻合较好.实验所测量的SPP 波包群速度为2.901×108m·s—1,相速度为(2.94±0.01)×108m·s—1.该技术可用于定量分析SPP 在平面薄膜上的传播,可同时实现10 fs 量级的时间分辨率、以及接近衍射极限的空间分辨率.
2.3 远场单脉冲时空显微成像
虽然基于飞秒激光的泵浦-探测技术可以提供飞秒尺度的高时间分辨率,但泵浦-探测技术需要设置泵浦光、探测光之间不同时间延迟,重复激发样品的动态变化过程,并将重复结果近似视为相同过程的不同瞬间.然而,实际情况下,考虑到样品材料成分的不均匀性、表面形貌的不均匀性、以及激光能量的不稳定性,无法保证每一次重复激发都完全相同,因此泵浦-探测技术存在其固有的局限性,即不适合对随机的、难以重复的过程进行探测.
为了克服泵浦-探测技术在动态测量中的不足,研究人员开发了多种基于单次脉冲的时空显微成像技术.单脉冲成像技术利用单个超快脉冲就能捕捉到不同时刻的动态过程,实现实时成像,克服了泵浦-探测技术不适用于随机、非重复过程的缺点.需要说明的是,单脉冲时空成像一般基于远场成像技术,因为不少远场成像技术可以直接输出二维、宽场的图像.而近场成像一般要求探针逐点扫描,每个点至少需要一次脉冲来激发信号,所以不具有单脉冲成像的能力.以下着重介绍几种代表性的远场单脉冲时空显微成像技术.
2.3.1 压缩超快成像
压缩超快成像技术(compressed ultrafast photography,CUP)是2014 年由加州理工大学汪立宏院士团队[84]首先提出,之后引起了全球相关领域科学家的关注.作为一种计算成像方法,CUP 包括正向数据采集过程和反向数据重构过程.CUP技术的数据采集过程主要包括编码、偏转及时空压缩三个过程.首先三维动态场景经过编码器进行随机二进制模式编码,然后编码后的信息进入到偏转器进行时间偏移,即不同时刻的信息会偏转到不同的位置,最后进行时空积分的叠加压缩,可以得到一个包含时空三维信息的二维平面数据,最后通过压缩感知算法对其进行解码,即可得还原出原始的时空信息.相比于其他单次超快成像技术,CUP 的一大优势是不需要专用主动照明[85],因此CUP 可以成像各种发光物体,例如荧光或生物发光体.
2018 年,汪立宏团队[86]在CUP 原型的基础上,进一步提出了单脉冲每秒10 万亿帧的压缩超快成像系统(T-CUP),并在单摄像机曝光中以100 fs/帧间隔实现了单个超短激光脉冲在动态散射介质中聚焦过程的实时、超快、被动成像,实验光路图如图11(a)所示.首先高速运动的物体所成的像通过分束器分成两束,其中一束进入外部CCD,由外部CCD 直接记录整个曝光时间内物体随时间演化的时间积分;另一束光聚焦到DMD 上,由DMD 进行编码,然后进入到飞秒条纹相机中,实验所用的条纹相机最高时间分辨率为200 fs.为了记录二维图像信息,将条纹相机的入口狭缝完全打开,光信号在光电阴极激发出的电子经过电压后在空间方向上偏转,并由检测器记录.最终借助重建算法,可以获得帧速率高达10 Tf/s 的动态场景的延时视频,时间分辨率达到了100 fs.

图11 (a) T-CUP 系统示意图.其中黑色虚线框为条纹相机中的条纹管的详细图示[86];(b)使用T-CUP 系统得到的飞秒脉冲时间聚焦的时空演化[86]Fig.11.(a) Schematic of the T-CUP system,where the black dashed box is a detailed representation of the striped tube in the striped camera[86];(b) spatiotemporal evolution of the femtosecond pulse time-focus obtained using the T-CUP system[86].
在聚焦过程中,超短激光脉冲的宽度和强度发生剧烈变化,因此需要飞秒级曝光来捕捉这种精细现象中产生的瞬时光场.他们利用该系统研究了脉宽为50 fs 的飞秒脉冲的时空聚焦过程,揭示了脉冲在聚焦传播时强度、形状和宽度的完整演变,结果如图11(b)所示.同时,他们提出,如果将系统中(10×,NA=0.12)的聚焦物镜替换为20×的高数值孔径物镜,该系统可以提供100 fs 的时间分辨率,1 µm 的空间分辨率,以及150 µm 的大视场.
2.3.2 光栅原理全光成像
采用光栅原理的超快摄影具有帧速高和帧数充足的优点,然而,由于机械运动机制、时空电荷效应、电子束扫描设备中固有的电子抖动等限制,现有的超快光栅分幅相机无法在原子运动的时间尺度上工作.2021 年,深圳大学李景镇、徐世祥团队[87]将采样理论和光谱时间编码技术相结合,提出并演示了一种新的基于光栅原理的全光成像技术(alloptical photography with raster principle,OPR),该技术可以绕过这些限制,在原子时间尺度上实现实时捕捉超快现象的成像.同时,与压缩感知算法相比,OPR 具有更直接、更快速的重建算法和更高的稳定性.
OPR 分为两个步骤: 数据采集和数据重建,其中数据采集可以由光栅分幅相机(raster framing camera,RFC)完成,基于RFC 进行采样的原理如图12(a)所示.从图12(a)可以看到,可以将瞬态场景看作时间离散化的帧序列,并用线性啁啾脉冲照明.通过物镜将被照明的物体成像到微透镜阵列上,即可形成中继图像.中继图像经过微透镜阵列,微透镜阵列的每一个小透镜都对物镜的入瞳成像,形成光栅图像,该光栅图像即为采样后的物体图像.光栅图像经过一个4f系统,其中频谱面上放置衍射光栅,由于照明光为连续啁啾脉冲,就能在像面上形成光谱空间分离的光栅图像,它是时间编码的单波长光栅图像的累积,其中不同波长的图像位于检测平面的不同位置.

图12 (a) 利用光栅分幅相机(RFC)进行采样的OPR 原理图[87];(b) 利用OPR 单次激发超快成像系统采集到的空气中等离子体运动过程图像[87]Fig.12.(a) Schematic of OPR using the raster framing camera (RFC) [87];(b) images of plasma motion processes in the air collected by the OPR single-shot ultrafast imaging system[87].
数据重建可以通过傅里叶变换实现.通过系统校准,可以从时间编码的光栅图像中提取出每个单波长的光栅图像,最后通过傅里叶变换,可以得到该波长下的物体图像,由于啁啾脉冲波长和时间的映射关系,即可得到物体随时间动态演化的图像.同时,还可以通过光栅图像在检测平面上像素大小来计算帧之间的间隔时间,OPR 的理论时间分辨率可以达到10 Tf/s (即100 fs).
为了证明了OPR 的可靠性,他们使用OPR技术观测了空气和玻璃中等离子体的运动过程,并和泵浦-探测成像的结果进行对比.图12(b)展示了OPR 单次成像的实验结果,实现了从0—5.5 ps下等离子体运动过程的超快摄影,实现了90 lp/mm(11.1 µm)的空间分辨率,帧速率为2 Tf/s 的时间分辨率(500 fs).同时与泵浦-探测技术的成像结果对比,两种模式的实验结果基本一致,证明了OPR 技术捕捉时空三维瞬态场景的可靠性.
2.3.3 啁啾光谱映射超快成像
2021 年,华东师范大学张诗按团队[88]提出了啁啾光谱映射超快成像技术(chirped spectral mapping ultrafast photography,CSMUP).与泵浦-探测技术不同,CSMUP 使用具有时间色散的单个啁啾宽带激光脉冲作为探测光源来记录超快动力学,高光谱相机作为检测器件来同时获取光谱和空间信息.基于啁啾激光脉冲的时间-光谱映射关系,可以根据光谱图像恢复出不同时刻下的超快动力学成像结果.CSMUP 不需要依赖光谱信息的空间偏转,而是直接使用高光谱相机对不同波段的光谱信号同时响应,来实现不同波长图像的获取.
高光谱相机基于具有高光谱法布里的标准CMOS 传感器设计而成,在传感器像素结构顶部添加法珀干涉滤波器,过滤出不同的光谱带,从而能够在多个不同的光谱范围内工作.实验所使用的高光谱相机有25 个单独的光谱带,排列为5×5 阵列,因此它可以在一次曝光中捕获25 个高光谱2D图像.基于这25 个不同波段的光谱图像,通过时间-光谱映射关系对应到不同的时间序列,从而实现单脉冲时间分辨测量.
CSMUP 系统如图13(a)所示,钛宝石激光放大器输出激光分为两条路径,一条通过BBO 晶体产生400 nm 泵浦脉冲,另一条路径聚焦到YAG晶体中,以产生具有从可见光到近红外的宽光谱成分的超连续激光脉冲.使用长度为60 cm 的玻璃棒拉伸激光脉冲宽度并产生正啁啾超连续激光脉冲,持续时间为100 ps.400 nm 泵浦脉冲和啁啾探测脉冲通过二向色镜组合,然后用物镜聚焦在硅样品表面.最后使用高光谱相机记录动态图像,该相机收集了659—949 nm 范围内不同波长的25 幅光谱图像.CSMUP 的时间分辨率取决于啁啾激光脉冲的持续时间和高光谱相机一次能够采集的光谱带数量(该系统为25 个光谱带),因此可计算出该系统的时间分辨率为4 ps.他们用光栅测量了该系统的空间分辨率,当使用50×物镜进行观察时,能够分辨1200 pl/mm 的光栅,所以最终达到小于833 nm 的空间分辨率、以及4 ps 的时间分辨率.

图13 (a) 用于飞秒激光烧蚀测量的CSMUP 系统[88];(b) CSMUP 在400 nm 飞秒激光照射下对硅烧蚀的单脉冲不同时刻动力学成像结果[88]Fig.13.(a) System configuration of CSMUP for the femtosecond laser ablation measurement [88];(b) single-shot laser ablation dynamics measurement of silicon under a 400 nm femtosecond laser exposure captured with CSMUP[88].
为了验证该系统的时空成像能力,他们使用400 nm 飞秒激光脉冲在厚度为0.5 mm 的抛光硅晶片上烧蚀,并使用CSMUP 成像其超快动力学过程.所记录的25 张不同时刻单脉冲烧蚀图像如图13(b)所示,可以看出,从8—26.6 ps 反射强度逐渐增加,归因于载流子的晶格加热-声子散射所带来的高反射率.38.4 ps 处之后中心区域变暗,是由于材料喷发引起的表面形貌变化和材料蒸发引起的光吸收/散射引起,说明烧蚀开始出现.这些结果证明了此技术在激光加工监测领域的应用前景.
2.3.4 时序全光映像摄影术
2014 年,日本东京大学Nakagawa 等[89]和Sakuma 教授课题组[90]提出了时序全光映像摄影术(sequentially timed all-optical mapping photography,STAMP).STAMP 是一种单次主动式照明超快成像技术,需要特定的照明光源.主动式照明超快成像技术一般是把照明光的空间、频谱或者相位信息通过计算转换为时间信息,用照明光的时间信息反演动态过程,其可实现的最高帧速率约为4.4 Tf/s,对应帧间隔约227 fs.
STAMP 的技术原理如图14(a)所示,其系统由五部分组成: 超短脉冲激光器、时间映射装置(temporal mapping device,TMD)、空间映射装置(spatial mapping device,SMD)、图像传感器和计算机.首先,从光源发射的超短激光脉冲通过TMD后,产生多个不同中心波长的超短脉冲.TMD 由一个脉冲展宽器(如玻璃棒、棱镜对或光纤)和一个脉冲整形器(如一个带有空间光调制器的4f系统)组成.该脉冲整形器将啁啾脉冲“裁剪”成脉宽、强度完全相同,但不同中心波长的多个子脉冲.子脉冲由运动的目标图像编码之后,通过空间映射装置SMD 将其在空间上进行分离,并将不同脉冲指向图像传感器的不同位置.SMD 由衍射光栅、潜望镜阵列和透镜组成,可在图像传感器上形成子脉冲图像而不变形,空间分离的子脉冲最终由图像传感器探测.最后对图像传感器上记录的图像进行数字处理和重新组合,根据时间-光谱以及光谱-探测器空间坐标之间的映射关系,就可以从携带时间信息的图像帧中重建出超快的运动图像.

图14 (a) STAMP 技术原理示意图[89];(b) 用STAMP 对晶格振动波进行时间分辨成像[89]Fig.14.(a) Schematic of STAMP[89];(b) time-resolved imaging of the lattice vibrational waves with STAMP[89].
STAMP 相机的帧速率和曝光时间可以通过调整TMD 中的时间色散来确定,以匹配不同过程的时间尺度,例如通过增加SMD 中潜望镜阵列中潜望镜的个数,来增加图像采集的帧速率.同时,STAMP 在宏观、微观两种成像条件下都可以实现高像素分辨率成像: 在微观成像条件下,成像像素为680×560,空间分辨率为微米量级;在宏观成像条件下,成像像素为600×490,空间分辨率为10 µm量级.其时间分辨率为227 fs,由于采用了光谱图像编码的方法,将光谱分配给不同时刻的信息,这就导致了帧数与系统的时间分辨率之间是相互制约的.
STAMP 可用于在飞秒时间尺度上观察晶体中的声子动力学(图14(b)).他们将脉冲能量40 µJ、脉宽70 fs 的激发脉冲聚焦到LiNbO3晶体中,通过脉冲受激拉曼散射产生声子.图中显示了不同时刻的声子动力学过程,包括激光脉冲的强电磁场激发晶体中的晶格振动,然后晶体形成声子-极化子波包,并从激发区域传播出去.
2.3.5 非共线光学参量放大成帧成像
2020 年,深圳大学李景镇、徐世祥团队[91]提出了一种基于光学参量放大(optical parametric amplification,OPA)的单次超快光学成像技术,称为非共线光学参量放大的成帧成像(framing imaging based on noncollinear optical parametric amplification,FINCOPA)技术,首次将非共线光学参量放大用于单次光学时空成像中.
如图15(a)所示是啁啾脉冲光照明、超短脉冲泵浦取样的FINCOPA 超快实时多幅成像系统原理图.在这个系统中,利用基于光栅原理的脉冲展宽器,可以将飞秒脉冲展宽成脉宽50 ps 的啁啾脉冲,利用啁啾脉冲信号光使不同时刻时变对象加载到不同波长上,再利用35 fs 的泵浦光调节不同时刻的延迟,使其在四个OPA 中对携带不同时刻信息的啁啾脉冲泵浦取样,即获得四幅时序的闲频光图像信息.在通过波长分离器之后,400 nm 脉冲被分束器组分成四个子脉冲,作为泵浦光分别进入四个光学参量放大器(NCOPA-1 至NCOPA-4).由于这里放大器的数量是4,因此可以一次拍摄得到四帧图像,这主要受飞秒激光系统的输出脉冲功率的限制.成像的时间分辨率取决于泵浦光的脉冲宽度以及各路泵浦光脉冲的相对时间延迟.

图15 (a) FINCOPA 技术原理图[91];(b) 用FINCOPA 对等离子体光栅运动进行时间分辨成像[91]Fig.15.(a) Schematic diagram and experimental setup of FINCOPA[91];(b) time-resolved imaging of the plasma grating motion performed with FINCOPA[91].
利用这个系统,作者研究了空气中等离子体光栅演化过程的单次成像,等离子体光栅的空间周期最小为10 µm,寿命为ps 量级.使用非共线等离子体干涉仪(noncollinear plasma interferometer,NCPI)通过两个非共线800 nm 超短脉冲激发空气等离子体光栅,光栅的周期可以通过两个脉冲的干涉角来调整.如图15(b)展示了从0—30 ps 下的16 张等离子体光栅运动图像.从图15(b)可以看出,随着时间的推移,等离子体光栅从左到右的条纹逐渐可见.实验时的光栅周期为12 µm,在实验中实现了50 fs 时间分辨率、12 µm 空间分辨率的时空光学成像,有效帧速率为10 Tf/s.作者还使用FINCOPA可视化高速旋转动态过程,实现了最高15 Tf/s 的帧速率.若使用20×物镜进行成像,FINCOPA 可以实现300 pl/mm (约3 µm)的空间分辨率,意味着其时空分辨率还可进一步提升.
3 超高时空显微成像的应用研究
超高时空显微成像技术因其兼具高时间、高空间分辨率,被广泛应用于分子结构动力学[33]、光合作用[34]、飞秒激光微加工[96,97]、光电材料/器件中的载流子转移[107-109]、光子轨道角动量动力学[114]等各种微观、超快过程的探测.下面将对近年来超高时空显微成像的一些代表性应用研究进展进行介绍与分析.
3.1 超快激光加工过程检测
超快激光加工具有高精度、高效率、低附带损伤和广泛适用性,是精密加工的有力工具.对超快激光加工的超快动力学进行成像,对于理解加工机理和建立相应的物理模型是非常重要的.1985 年,Downer 等[92]首次将飞秒泵浦-探测技术和光学显微镜相结合,实现了硅表面激光烧蚀过程的成像,所达到的时间分辨率为100 fs,能够探测的时间过程为600 ps,但所能达到的空间分辨率只有5 µm.从此,对飞秒激光烧蚀过程机理的揭示成为超高时空分辨显微镜的重要应用之一,国际上已经有很多研究成果揭示了不同材料上激光烧蚀、激光诱导表面周期性结构(LIPSS)的形成过程[93-95].
2017 年,中国科学院长春光学精密机械与物理研究所中美联合实验室郭春雷教授团队[96]将泵浦探测技术与光学显微镜相结合,开发了一种基于零背景和高对比度散射光的光学时空成像技术.通过该技术,捕捉到飞秒激光诱导的金属表面形态结构动力学从开始到结束的完整时空演变,即从初始瞬态表面波动到熔化和烧蚀,直到再溶解结束,如图16(a)所示.他们在实验中发现瞬态表面结构首先出现在约100 ps 的延迟时间,这归因于表面层中压力松弛驱动的烧蚀.在有利于纳米结构形成的较低激光烧蚀功率下,瞬态表面结构首先出现在烧蚀斑点的中心部分;而在有利于微米结构形成的较高激光烧蚀功率下,纳米结构首先出现在外围,随后微米结构在中心区域出现.
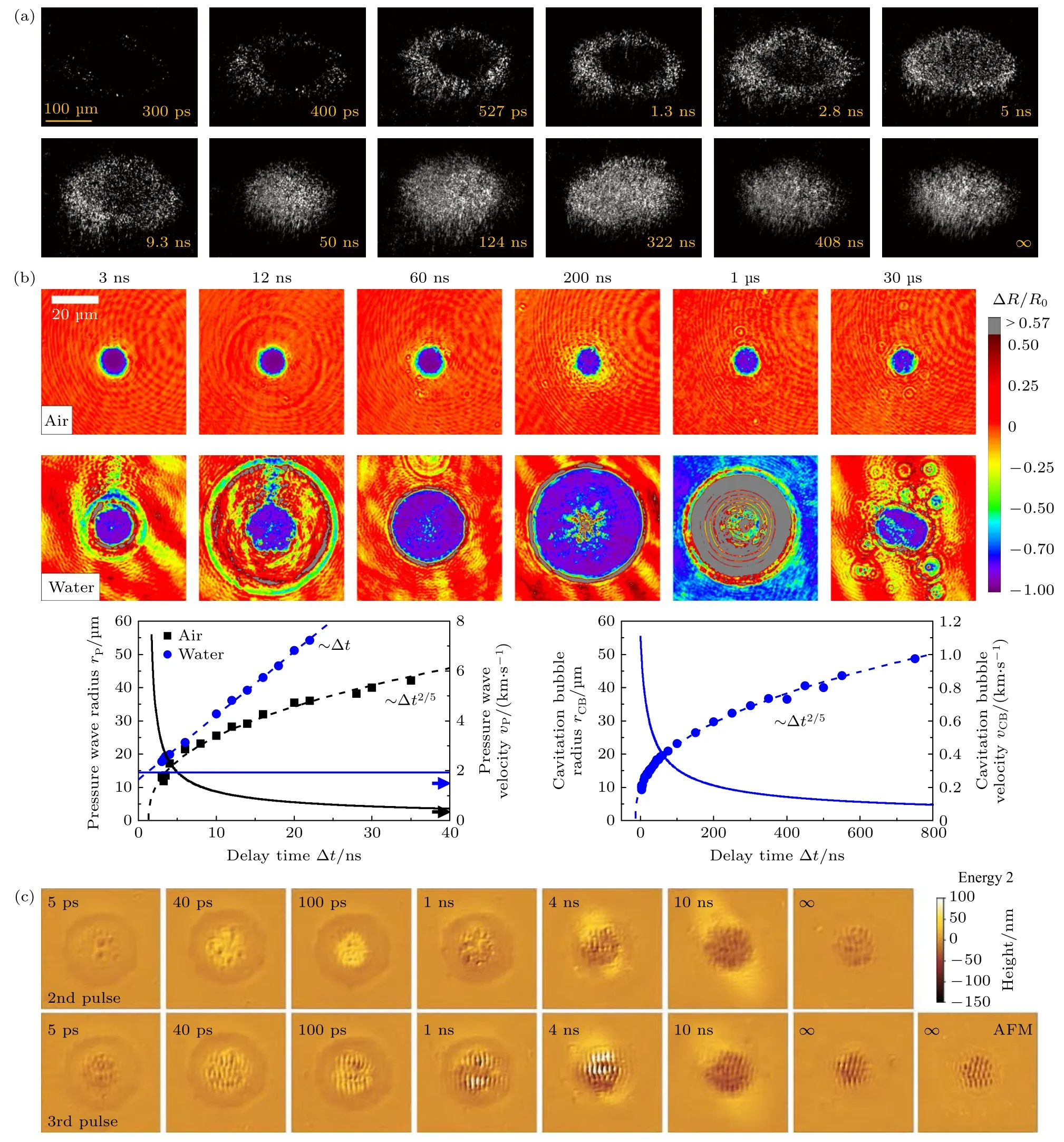
图16 (a) 在1.0 J/cm2 能量密度的泵浦脉冲后,锌表面在不同延迟时间的CCD 图像[96];(b) 空气和水中的皮秒激光诱导烧蚀动力学[97];(c) 泵浦功率为0.29 J/cm2 下,第二和第三个脉冲叠加后硅表面的超快形貌演变,并将最终结果与原子力显微镜(AFM)进行比较[60]Fig.16.(a) CCD images of the Zn surface impacted by pump pulse at different delay times with energy of 1.0 J/cm2[96];(b) picosecond laser-induced ablation in air and water[97];(c) ultrafast topography evolution on the Si surface impacted by 2nd and 3rd pulses with energy of 0.29 J/cm2,and final results compared with AFM[60].
2022 年,Spellauge 等[97]将泵浦-探测技术与光学显微镜相结合,分别探测了空气和水环境中金膜的皮秒激光诱导烧蚀动力学,实验所搭建的超快泵浦-探测显微镜系统具有630 nm 的横向空间分辨率,以及500 fs 的时间分辨率.通过测量烧蚀结构的瞬态反射率,将水和空气中的烧蚀过程进行对比,证明了水约束层在皮秒到微秒时间尺度上显著影响着烧蚀动力学,如图16(b)所示.水层有助于电子发射诱导的光学击穿产生等离子体,将烧蚀羽流限制在数百ps 的时间尺度上,并促进约1 ns 后空化气泡的产生.实验结果完整地展示了从1 ps的早期阶段到空化泡崩溃、纳米颗粒被喷射的激光烧蚀机制,与已建立的理论预测非常一致.
2022 年,深圳大学袁小聪、闵长俊团队[60]利用宽视场单探测结构光显微镜(SPSLM),成像了LIPSS 的表面三维形貌演变过程.LIPSS 是表面结构加工领域的研究热点,其产生原理目前最为广泛接受的理论模型为干涉模型,包括入射激光与表面散射波的干涉模型[98]以及表面等离激元(SPP)干涉模型[99,100].LIPSS 的条纹方向与激光的偏振有关,一般是垂直于偏振方向,少部分平行于偏振方向.根据表面波干涉模型,LIPSS 的周期与数由入射激光波长、材料折射率和激光入射角共同决定.作者利用三个能量相同的泵浦脉冲依次入射到硅晶片样品表面诱导LIPSS 结构,LIPSS 的演化结果如图16(c)所示.单个泵浦脉冲能量为0.29 J/cm2,重复频率设置为10 Hz.由于泵浦光在样品平面上是一个艾里光斑,光斑中心处的能量较高,而边缘处的能量密度相对较低,因此光斑中心的地形变化比边缘附近的地形变化更剧烈.在连续的第二和第三脉冲冲击由第一脉冲诱导的结构后,LIPSS 现象开始出现,其空间方向垂直于激光的偏振方向.由于光斑中心能量较高,因此LIPSS 从中心开始产生,逐渐扩散到光斑边缘区域.研究超快脉冲作用过程中不同材料表面的形态响应和形貌演变,对于理解LIPSS 的潜在机制具有重要意义.
3.2 光电材料/器件的载流子动力学表征
近年来,许多具有优良光电性质的新型低维材料的出现,为新型光电材料和器件的研究与发展注入了新的活力.因此,对半导体器件及新型二维材料的中载流子动力学的研究至关重要,这将帮助人们更深入地了解其中的奥秘.超高时空分辨显微成像技术兼具超快光学和表面载流子高分辨探测的优点,是研究这些型光电材料与器件的强有力工具.
二维过渡金属二卤化物(TMDs)具有许多奇特的性质,例如在单层样品中出现直接带隙[101],以及谷极化[102],因此TMDs 在光信号收集[103]、高灵敏光电探测器[104]、场效应晶体管[105]、发光二极管[106]等领域中得到广泛应用.全面了解二维过渡金属二卤化物(TMDs)中的超快电子动力学对于其在光电子器件中的应用是非常重要的.2018 年,新加坡的Loh 团队[107]报道了使用飞秒时间分辨光发射电子显微镜(tr-PEEM)来成像化学气相生长(chemical vapor deposition,CVD)的单层二硒化钨(WSe2)的超快(亚皮秒到皮秒)载流子动力学过程,如图17(a)所示.对tr-PEEM 数据的分析提供了单个WSe2薄片内各种时间常数下的空间分布,如图17(a)展示了WSe2薄三个不同位置点处信号强度随延迟时间变化曲线,反映了不同位置下的电子弛豫.
除了二维材料,一维材料如纳米线的热电子弛豫和输运动力学过程最近也被报道.2021 年,Wittenbecher 等[108]利用tr-PEEM 在飞秒时间尺度上成像了直径100 nm 的InAs 纳米线内光生热电子的弛豫过程,如图17(b)所示.实验系统的时间分辨率为30 fs.他们观察到热电子在100 fs 内传输到纳米线表面,发现电子-空穴散射在前几皮秒期间对热电子冷却有很大影响,而声子散射在更长的时间尺度上更为显著.实验证明,根据激发光偏振,纳米线的纤锌矿和锌铅矿晶体段的冷却时间尺度不同.通过实验确定得到的热电子传输机制,将会在纳米器件的设计研发中发挥重要作用.
除了低维材料,电子动力学过程还可以在更小的空间尺度上被观测到,即直接观测分子中电子的弛豫过程,这对理解和控制化学反应具有关键作用.2022 年,Garg 等[109]报道了利用扫描隧穿显微镜结合阿秒激光技术,在埃尺度(10—10m)的空间分辨率以及亚飞秒尺度时间分辨率下,直接观察到<6 fs 的近红外激光脉冲在分子中诱导的量子电子相干,如图17(c)所示,实现了电子基态与表面态相互转移的苝四羧酸二酐分子(PTCDA)的量子电子相干干涉的时空成像.
3.3 表面等离激元的超快动力学表征
SPP 是由金属表面的自由电子随入射光子同频率集体振动,从而产生的一种在金属表面近场范围内传播的局域电磁波模式[110,111].因此SPP 既可以通过光子进行探测,也可以通过电子进行探测,对SPP 的超快动力学成像可以使用光学显微镜或电子显微镜进行.
2015 年,Nishiyama 等[112]利用飞秒近场光学显微镜在100 nm,10 fs 的时空分辨下,观察了单个金纳米棒中SPP 波包的产生和动力学.在用超短脉冲同时激发纳米棒的两个SPP 模式后,获得了反映波包往复运动的时间分辨信号的衰减和恢复特征,如图18(a)所示.瞬态近场图像的空间特征随时间变化,是由于两种SPP 模式的空间特征在20 fs 的时间延迟交替出现.作者理论分析了光脉冲激发SPP 波包传输的运动过程,发现可以通过调整泵浦-探测脉冲之间的时间延迟来控制SPP 波包的空间特征,为未来实现对SPP 波包动力学的操纵提供了新方法.

图18 (a) 金纳米棒的瞬态近场图像中沿着棒轴的线轮廓的时间变化[112];(b) LCP 和RCP 光反对称模式和对称模式的激发下的光电发射强度随时间演变图及0 fs 下的PEEM 扫描图像[113];(c) tr-PEEM 观测SPP 携带OAM 实验示意及观测结果,SPP 涡旋场在约2.67 fs 的单个光学周期内演化状态的快照序列图[114];(d) ITR-PEEM 对从银膜矩形沟槽发射的飞秒SPP 的时空演化成像[115];(e) 金纳米链的拓扑边态动力学过程[116]Fig.18.(a) Time variation of the line profiles along the rod axis in transient near-field images of nanorod[112];(b) PEEM-measured(solid lines) and theoretically fitted (dashed lines) photoemission intensity curves against the delay time between the two pulses for LCP and RCP light,corresponding to excitation of the antisymmetric mode and symmetric mode,respectively,as indicated by the PEEM images with a delay time of 0 fs in the insets[113];(c) schematic experimental methodology and experimental tr-PEEM snapshot sequence of the rotating field of a plasmonic vortex in the revolution stage within a single optical cycle of~2.67 fs[114];(d) spatial-temporal evolution imaging of the femtosecond SPP emitted from the rectangular grooves of the silver membranes by ITR-PEEM[115];(e) topological edge state dynamic processes of gold nanocarticles[116].
具有手性响应的SPP 手性微纳结构,也是近年来SPP 的研究热点之一.这些SPP 手性微纳结构的手性响应特性,可以通过改变入射光的方向/偏振、手性结构的形状/材质等方式实现调节,但是其光学响应中的时空过程仍不清楚.2021 年,日本北海道大学Misawa 课题组[113]利用tr-PEEM在纳米空间尺度和飞秒时间尺度下,观测了两个正交取向的金纳米棒在斜入射的左旋圆偏振(lefthanded circular polarization,LCP)和右旋圆偏振(right-handed circular polarization,RCP)条件下,由反对称和对称模式SPP 激发引起的巨大手性光学响应,如图18(b)所示.作者通过调控泵浦-探测脉冲之间的延迟时间,得到了金纳米棒二聚体的超快光电发射强度的时间演变,显示了LCP 和RCP光激励的不同振荡行为,图18(b)显示了延迟时间为0 fs 时的图像.此项研究证明时空成像技术能够在纳米和飞秒的时空尺度下表征手性光学响应,为研究光学手性的时空动力学以及与SPP 模式相互作用提供了新途径.
由于SPP 可以形成表面旋涡光场,具有携带轨道角动量(orbital angular momentum,OAM)的能力,而对SPP 所携带的OAM 进行探测和表征对于进一步理解微观条件下OAM 生成、演化特性及其与原子、分子相互作用的动力学过程具有重要的意义.2017 年,Spektor 等[114]利用飞秒激光在螺旋线形纳米金属结构中激发 SPP 旋涡场,并用tr-PEEM 在100 nm 的空间尺度和亚飞秒的时间尺度下,得到了SPP 涡旋的超快时间演化过程与群速度特性.金属平面上的螺旋状狭缝结构为所激发SPP 提供了螺旋相位,当选用圆偏振光激发SPP时,同时会发生自旋角动量到OAM 的转化.因此,狭缝提供的螺旋相位与入射光子所携带的自旋角动量共同决定了最终所形成SPP 涡旋的OAM.作者采用泵浦-探测的方法,研究了SPP 涡旋场在约2.67 fs 的单个光学周期内演化的超快动力学过程(图18(c)),直观表征了SPP 所携带的OAM 动力学特性.
2020 年,长春理工大学林景全团队[115]利用飞秒激光干涉时间分辨光发射电子显微镜(ITRPEEM)对从银膜沟槽激发的飞秒SPP 的时空演化进行了成像,并对比了有无400 nm 光辅助的两种成像情况,如图18(d)所示.研究发现,在800 nm近红外激光泵浦-探测ITR 方案中引入400 nm 光脉冲,可以利用ITR 方案的弱探测脉冲对飞秒SPP进行更清晰的时空成像,SPP 传播的时空图像的可见度得到了极大提高,有助于进一步分析飞秒SPP的传播和时空演化特性,并有望将SPP 场的成像从可见光扩展到光通信波段.
2021 年北京大学龚旗煌团队[116]利用tr-PEEM研究了具有SHH (Su-Schrieffer-Heeger)构型的金颗粒纳米链的拓扑边缘态动力学过程,并研究了其退相时间,如图18(e)所示.通过对纵向极化激发下纳米链长度依赖性的动态测量,发现局域等离激元拓扑边界态退相干时间首先随着纳米链长度的增加而增加,然后达到饱和.对局域等离激元拓扑边界态时域动力学过程及其演化图像的测量,有助于深入理解拓扑边界态的形成本质.该研究方式可扩展到其他拓扑结构或更高维度上去,这不仅为时域拓扑光子学的基础理论研究铺平了道路,也促进了新型高性能拓扑光子器件的实现.
4 总结与展望
本文围绕时间、空间这两个维度,从技术原理与应用研究两个方面展开,对近年来报道的多种代表性的超高时空分辨显微成像技术做了介绍与分析.表1 汇总了本文介绍的相关时空成像技术指标及优缺点.为了方便对比,还分别以时间、空间分辨率作为横纵坐标轴,用图表直观地展示不同技术对应的时空分辨率,如图19 所示.可以看出,近场多脉冲显微成像技术可实现的时空分辨率最高,空间分辨率均在衍射极限以下;但其所依赖的探针扫描系统普遍存在系统复杂、设备昂贵、扫描时间长等问题,在样品使用上也受到一定限制.远场多脉冲显微成像技术中,高NA系统、LRM 和SPSLM等技术的空间分辨率都受到光学衍射极限的限制,但也具有大视场、成像速度快、系统简单等优势;SPPM 技术的空间分辨率可突破衍射极限,但需要多步相移和多帧图像重构,对系统稳定性、重构算法都有更高的要求;基于电子显微镜的PINEM、超快PEEM 技术具有纳米、甚至亚纳米尺度的空间分辨能力,但所依赖的电子显微镜系统复杂且只适用于特定材料样品.远场单脉冲显微成像技术的空间分辨率普遍较低,均在几百纳米甚至微米量级,但其克服了传统泵浦-探测技术需要重复测量的缺点,在对激光刻蚀等不可重复现象的成像上具有重要优势.

表1 超高时空分辨成像技术指标及优缺点对比Table 1.Technical indexes,advantages and disadvantages of ultra-high spatiotemporal resolution imaging.

图19 超高时空分辨显微成像技术分辨率指标对比,包括近场多脉冲显微成像技术(红色框)、远场多脉冲显微成像技术(蓝色框)以及远场单脉冲显微成像(黄色框)Fig.19.Resolution of the ultra-high spatiotemporal resolved imaging techniques,including the near-field multipulse spatiotemporal microscopic techniques (red box),the far-field multi-pulse spatiotemporal microscopic techniques(blue) and the far-field single-pulse spatiotemporal microscopic techniques (yellow box).
展望未来,超高时空分辨显微成像技术正朝着“更小、更快、更智能、更广泛”的趋势快速发展.其中“更小”指空间域上: 需要克服飞秒脉冲色散引起的像差,在近场通过探针设计、远场通过光场设计进一步提升脉冲光的空间分辨,并将更多的超分辨成像技术与飞秒结合起来.“更快”指时域上: 一方面要与阿秒相关技术结合,提升时间分辨率;另一方面发展更多的单脉冲成像技术,提升单脉冲成像的时间间隔.“更智能”是指和计算成像、人工智能算法等结合,降低噪声、色散等影响,在图像重建中提升图像信噪比、对比度和分辨率.“更广泛”是指拓展更多应用,例如在生物分子化学反应监测方面,产生“分子电影”的效果.超高时空分辨显微成像技术不仅对于物理、化学、生物、材料中微观超快现象的研究有重要支撑作用,其应用涉及超快光学、微纳光学、二维材料、光电器件、先进制造等诸多前沿领域,未来具有广阔的发展前景.
猜你喜欢
初中生学习指导·中考版(2022年4期)2022-05-12
人人健康(2021年16期)2021-12-01
中学生数理化(高中版.高考理化)(2021年5期)2021-07-16
制造技术与机床(2019年8期)2019-09-03
华东师范大学学报(自然科学版)(2019年3期)2019-06-24
电子制作(2018年9期)2018-08-04
长春理工大学学报(自然科学版)(2018年2期)2018-05-26
中国设备工程(2017年24期)2017-12-28
中国光学(2016年2期)2016-11-09
系统工程与电子技术(2016年2期)2016-04-16
