
基于局域定位场景聚类的虚拟应答器布局优化方法研究
2023-09-11 03:11王思琦蔡伯根
铁道学报 2023年8期
王思琦,刘 江,2,3,蔡伯根,王 剑,2,3
(1.北京交通大学 电子信息工程学院,北京 100044;2.北京交通大学 智慧高铁系统前沿科学中心,北京 100044;3.北京市轨道交通电磁兼容与卫星导航工程技术研究中心,北京 100044;4.北京交通大学 计算机与信息技术学院,北京 100044)
随着列控系统自主化、智能化的不断发展,引入新技术、新方法提高列车运行效率、减少轨旁设备、降低线路建设成本和维护工作量,是我国新型列控系统(Chinese Train Control System-New, CTCS-N)和欧盟下一代列控系统(Next Generation Train Control, NGTC)的核心发展方向[1-2]。列车的自主定位是新型列控系统的一项基础性关键技术,引入全球导航卫星系统(Global Navigation Satellite System, GNSS)提供全天候、实时、精确的列车定位,已成为当前新型列控系统的重要研究内容之一[3]。
为实现列控系统低成本、高可靠的运营需求,在引入卫星定位的同时有效降低其对既有系统的异化程度,国际铁路联盟于2005年提出了基于卫星定位实现虚拟应答器(Virtual Balise, VB)的概念,旨在采用与欧洲列车控制系统(European Train Control System, ETCS)规范相兼容的虚拟应答器接口代替实体应答器向车载设备发送报文信息,从而减少对轨旁实体应答器的需求,降低实体应答器所导致的维护工作量和运营成本,为将卫星定位引入列控系统提供了一种重要的互操作化接入形式。然而,基于卫星定位的虚拟应答器技术要达到期望的功能与性能,对虚拟应答器所在位置的导航卫星信号观测质量提出了一定要求,即设置虚拟应答器位置的卫星观测条件需足以达到所需的定位性能水平。考虑铁路运行环境的复杂性,线路上各处的卫星观测条件不一,如何令虚拟应答器在线路上的“布设”充分保障导航卫星可见性及观测质量,已成为决定虚拟应答器实施效用水平的一项关键因素。现有关于虚拟应答器的研究多集中在VB与ATP列控系统的接口方法[4]、VB捕获方法[5]、VB安全风险分析[6]等,虚拟应答器的布局目前尚无统一方案。若参照实体应答器采用等间距布设方案[7],尚缺乏对虚拟应答器可用性的有效考虑。欧盟ERSAT-GGC[8-10]计划率先针对ETCS-3级系统提出VB布局优化的思想,采用威胁监测技术辅助虚拟应答器的逻辑位置布局,避免因外部环境(如电磁干扰与欺骗攻击等)引起虚拟应答器定位出现无界位置误差,但其在虚拟应答器候选位置的考量中着重关注外部的侵入性因素,对候选位置的信号观测质量尚未形成全面衡量,且还未形成一套完整的量化方案。
基于上述现状,本文提出一种基于局域定位场景聚类的虚拟应答器布局优化方法,从铁路沿线环境遮挡情况角度出发,提取列车往复运行中积累的卫星定位历史数据,重构沿线的可见天空轮廓,采用基于DTW距离度量的DBSCAN聚类算法确定轨道片场景,引入区段延拓思想划分开阔、受限、极端等不同区段类型,并利用改进的遗传算法对受限区段的VB布设方案进行优化。研究中利用现场试验数据对所提出的方法进行了验证和分析,体现该方法对实际线路中VB的布设效用和重要意义。
1 虚拟应答器工作原理
虚拟应答器本质上是一套车载列控系统的软件模块,包括定位单元模块(Locator Unit Module, LUM)、安全判别模块(Safety Qualifier Module, SQM)和虚拟应答器模块(VB Module, VBM),它通过卫星定位接收机等设备获取列车的实时位置、速度等信息,将该位置与预设在轨道上的下一虚拟应答器(Next Virtual Balise, NVB)的位置进行匹配,即VB捕获过程,从而确定列车经过参考点(即NVB)的时刻,提取预先存储在虚拟应答器报文数据库中的报文信息传输至列车自动超速防护(Automatic Train Protection, ATP)系统。列车在两个连续的VB之间运行时,由轮轴测速测距提供与最近相关虚拟应答器(Last Relevant Virtual Balise, LRVB)的相对位置信息,实现列车定位。图1为VB工作原理。
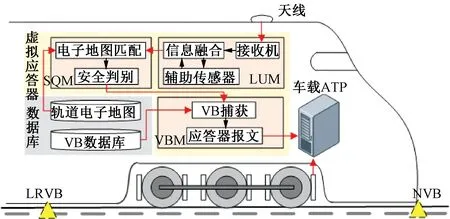
图1 虚拟应答器工作原理
在VB选址布局方面,欧洲铁路研究所(European Rail Research Institute, ERRI)于2005年发布一系列虚拟应答器功能规范[11-13],明确表示虚拟应答器的布设要实现以下目的:
(1)提高列车在VB之间的定位精度(连续两个VB的距离越小,则最大定位误差减小的概率越大)。
(2)VB应布设在卫星星座可见性较高的轨道位置,使卫星定位可用性、精确性和完好性得到最佳利用(不需要等间距沿轨道布设)。
(3)应避免将VB布设在实体应答器附近,避免信号之间的干扰。
最简单的VB选址布局参照实体应答器的布局方式,然而,实体应答器的布局方式不需考虑应答器待布设位置的卫星信号观测质量,对于拟布设VB的候选位置,如果因其局部地形环境等因素导致卫星信号观测质量不佳,可能使所实现的卫星定位性能不足以支撑高精度VB捕获,VB报文的激励无法达到预期的效果。图2为线路VB候选位置三种可能的卫星观测情况。
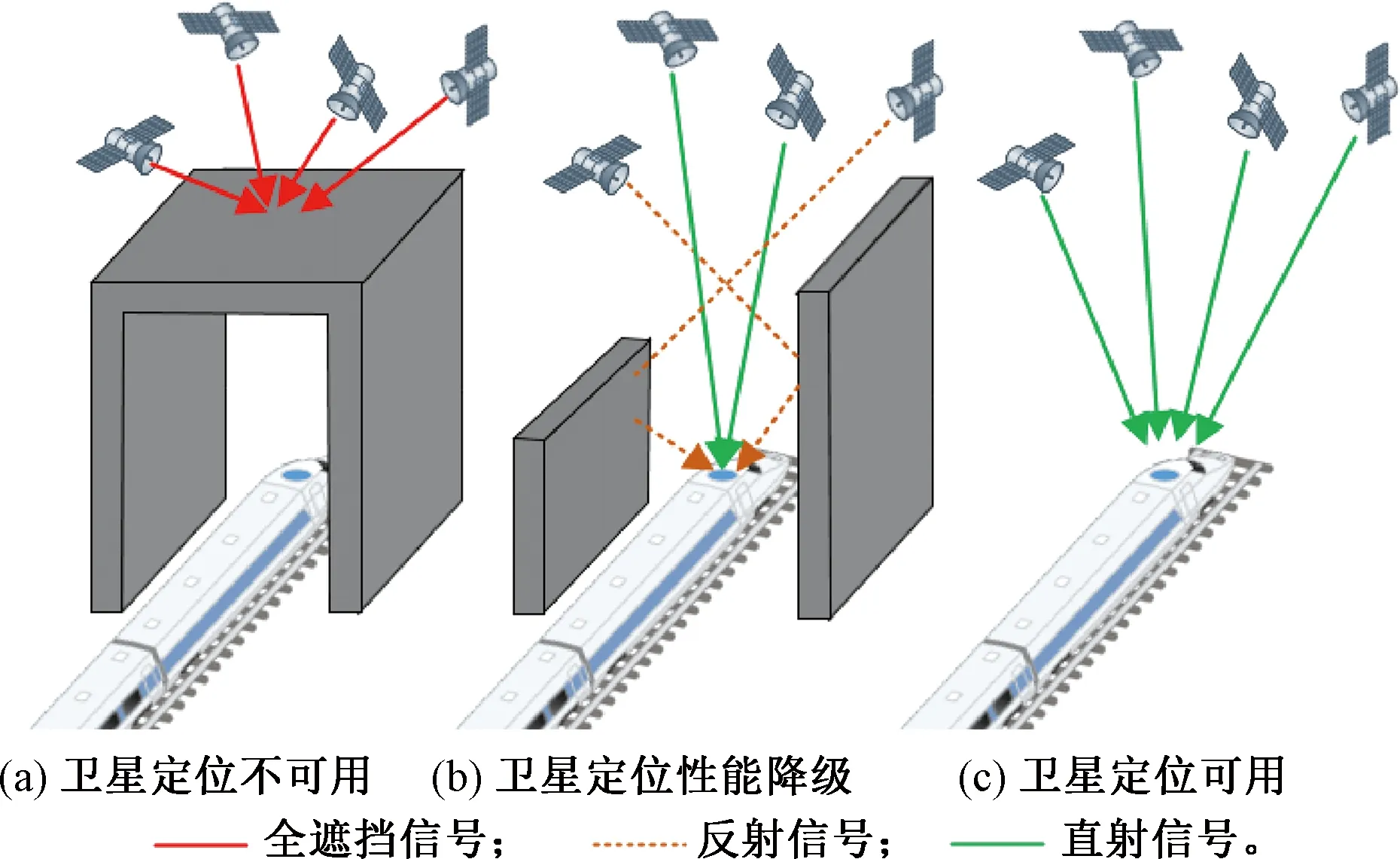
图2 虚拟应答器候选位置观测质量示意
由图2可知,不同线路环境下卫星观测质量可能存在显著差异,当列车处于全遮挡线路,如隧道、桥梁、带顶棚车站等,卫星信号被完全遮挡,卫星定位不可用,故该情况不适宜布设VB,应根据线路实际情况布设实体应答器;当列车运行线路环境为路堑、山脉、丛林等区域时,卫星信号极易受到遮挡,卫星定位接收机仅能接收部分卫星信号,且信号反射可能较常出现,则卫星定位性能会随之劣化,故而,VB应布设在上述线路区段中局部卫星观测质量较佳的位置;当列车运行线路周围环境较为开阔、遮挡较少时,卫星可见性好,定位性能易于得到保障,可采用相对直接的布局策略,如等间隔布设VB方式。基于以上分析,本文首先从目标线路的局域定位场景特征划分入手,为最终确定VB布局策略提供依据。
2 局域定位场景聚类策略
2.1 铁路沿线局域定位场景
铁路线路地域跨度大,沿线环境复杂多变,卫星信号极易受到外界环境不同程度的遮挡,导致卫星定位性能存在较大的差异。局域定位场景是卫星定位接收机天线周边局部范围内的地形环境(如山谷、树林、路堑、隧道等)所致卫星信号传播及接收特性的一种分类与描述,直接反映了卫星信号观测环境中信号受到遮挡等影响的程度,且不同定位场景下卫星定位性能存在差异。可见天空轮廓(天空遮挡的边界)作为局域定位场景的一种精细描述,可以用于局域定位场景辨识,评价不同区域卫星定位性能。卫星天空图描述了特定线路关键点上空的卫星分布情况,根据卫星分布特性,可以重构可见天空轮廓。绘制天空图需要两个参数:卫星仰角和方位角,其中,卫星仰角反映了卫星信号的质量,一般来说,卫星仰角越高,受线路周边障碍物遮挡和反射的可能性越小,卫星信号质量越高。卫星仰角也被广泛用于GNSS定位过程中相关权重的确定,是区分视距(Line of Sight, LoS)、非视距(Non Line of Sight, NLoS)信号的重要特征指标。图3显示了铁路沿线部分典型环境场景及其可见天空轮廓,天空图中阴影部分代表被遮挡的天空,红色线条即为可见天空轮廓,表示区域四周环境遮挡的细节。
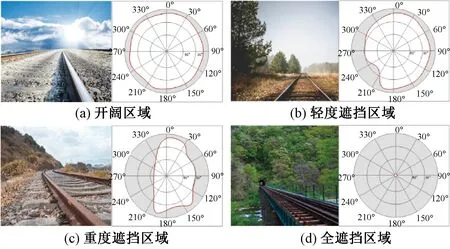
图3 典型环境场景及可见天空轮廓示意
因此,根据铁路沿线的可见天空轮廓,对铁路沿线局域定位场景进行聚类与判别,将遮挡程度相似的场景进行整合,依此确定不同区段是否适合布设VB以及宜采取的布设策略,从而实现全线VB选址布局。
2.2 聚类策略
定位场景聚类算法具体实施可分为以下7个步骤。
Step1数据准备。从卫星定位接收机原始数据中提取导航卫星观测信息,所涉及原始数据如表1所示。根据轨道电子地图将铁路沿线等间隔分割为若干轨道片segi,根据接收机解算的列车经度、纬度信息确定每个轨道片的历史导航卫星观测信息。
Step2剔除无效可见卫星。考虑部分不可见卫星信号易受多径效应的影响,被卫星定位接收机当成可见卫星信号接收并参与定位解算,从而降低了线路环境特征描述的准确性。设置卫星仰角阈值Tβ和卫星信噪比阈值TSNR,剔除无效可见卫星。
Step3选择边界卫星。边界卫星即接近可见天空轮廓的可见卫星。将方位角等间隔划分为若干个区域,在每个区域选择可见卫星最低仰角β,仰角属于[β,β+Bβ]区间的所有可见卫星组成该方位角的边界卫星,其中,Bβ为确定边界卫星的仰角带宽。
Step4曲线拟合。根据边界卫星,采用光滑样条函数拟合可见天空轮廓,得到参数化边界
( 1 )

Step5计算天空可见度。天空可见度Vis表示天空图中无遮挡天空所占的比例,为后续VB布局优化方法提供部分数据。
( 2 )
Step6曲线约简。若仅采用Step4所得序列进行聚类,会面临显著的相似度计算复杂性,故而采用Douglas-Peucker(DP)算法对可见天空轮廓进行约简,得到约简边界特征,以简化聚类相似性计算。
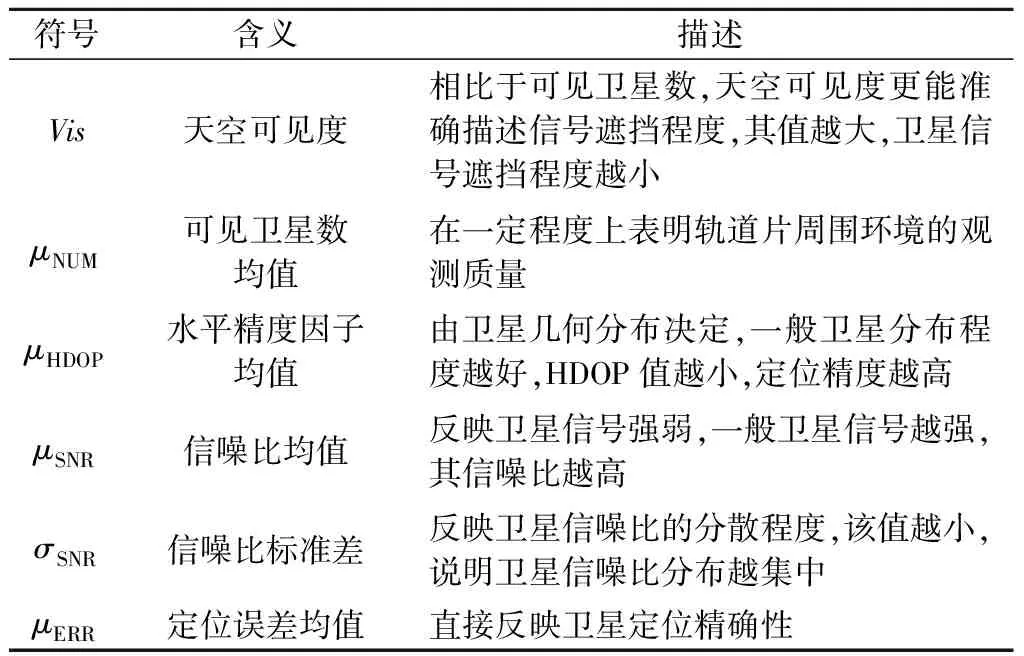
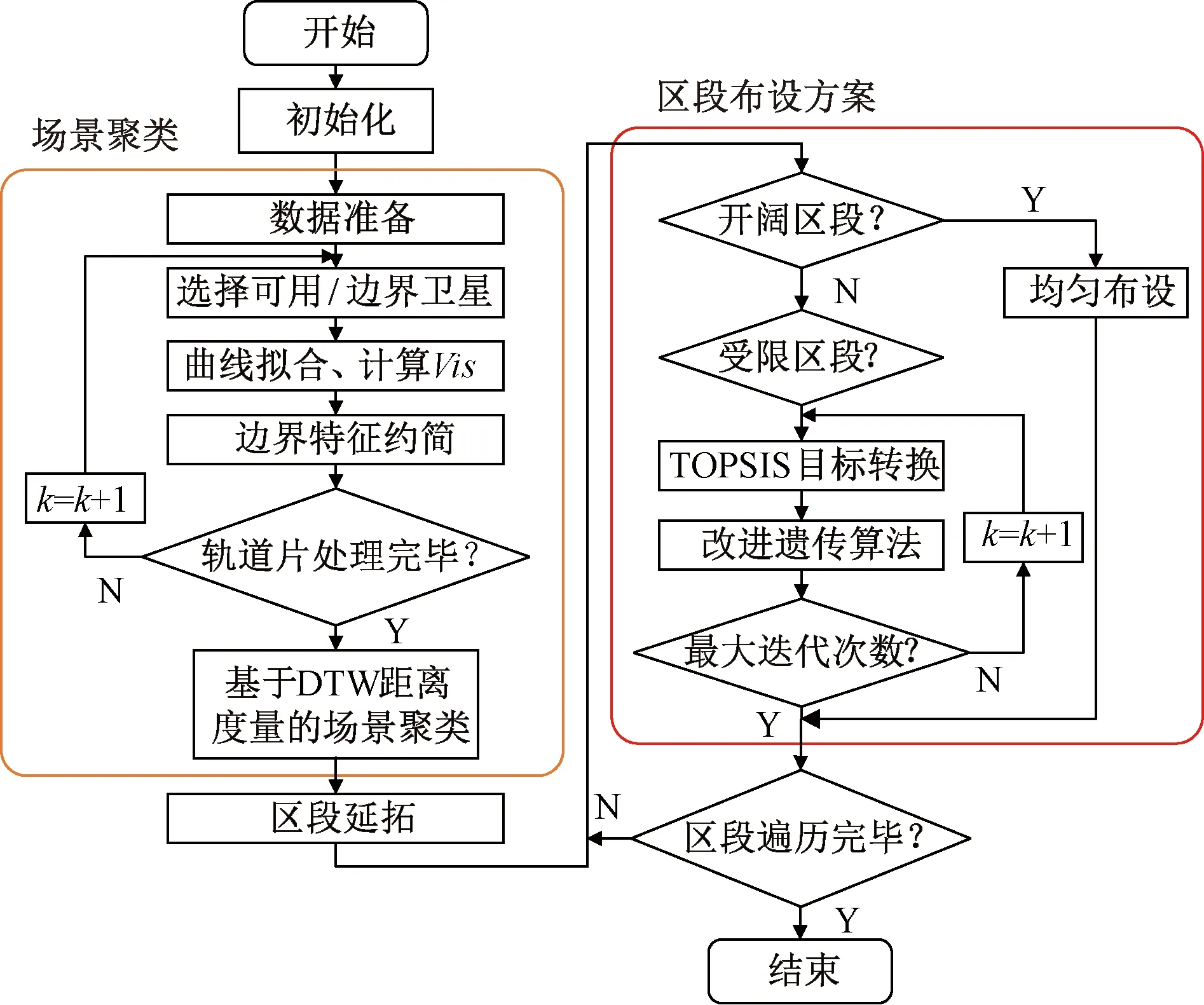
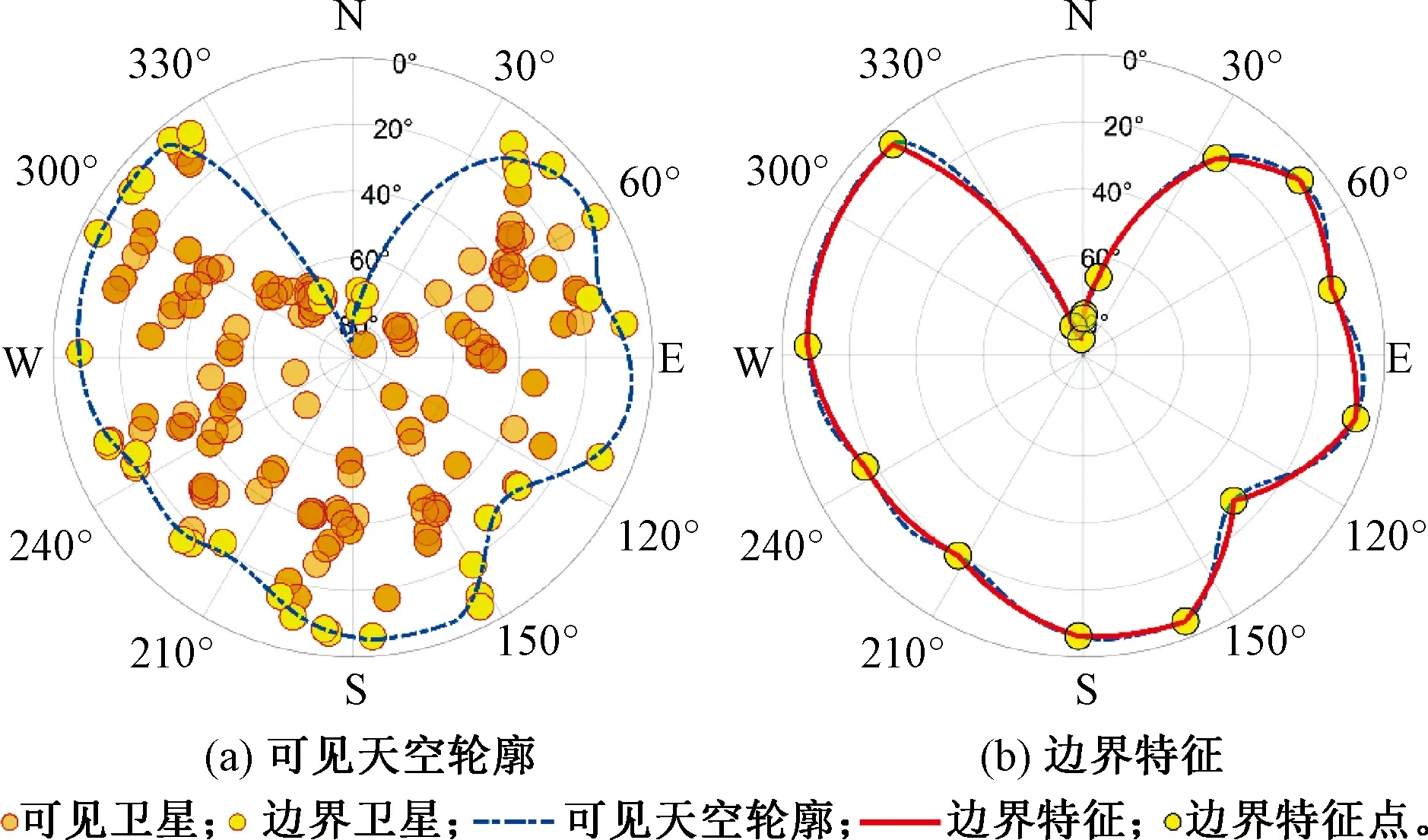
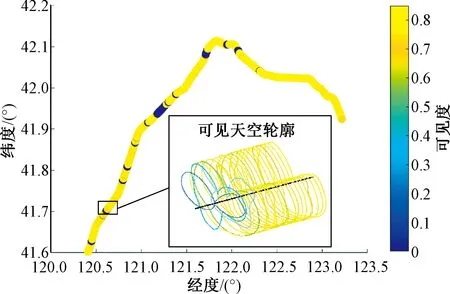
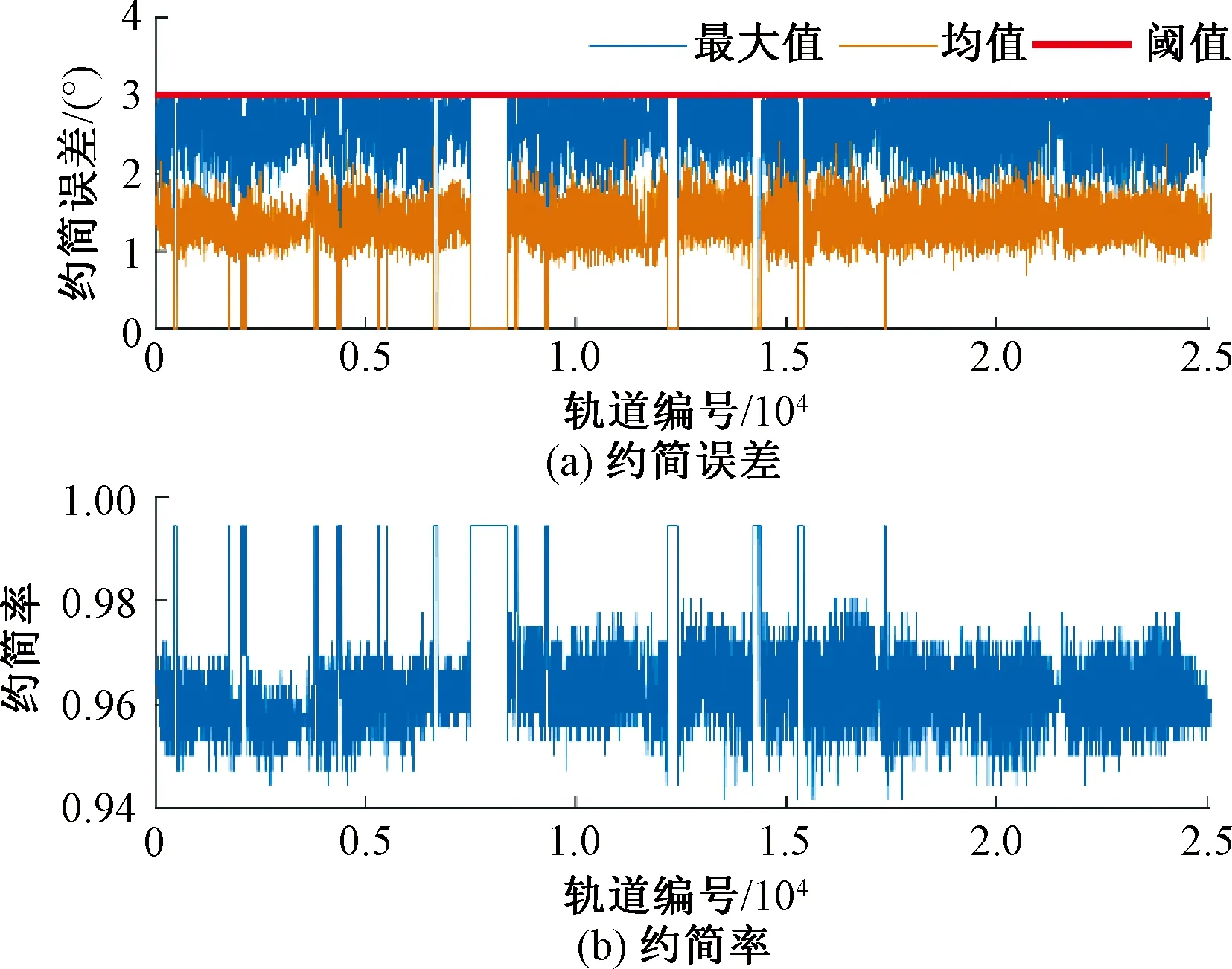
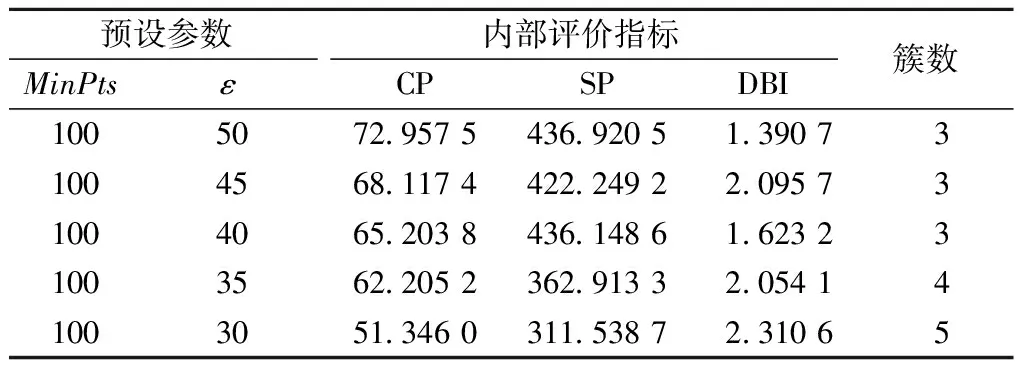
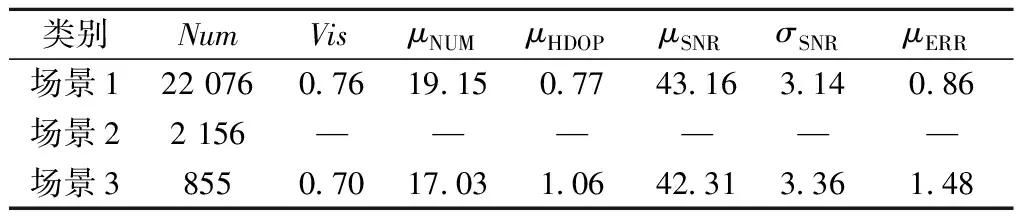
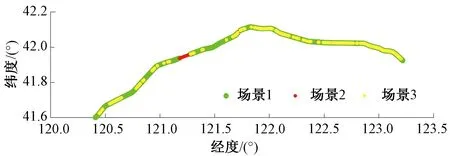
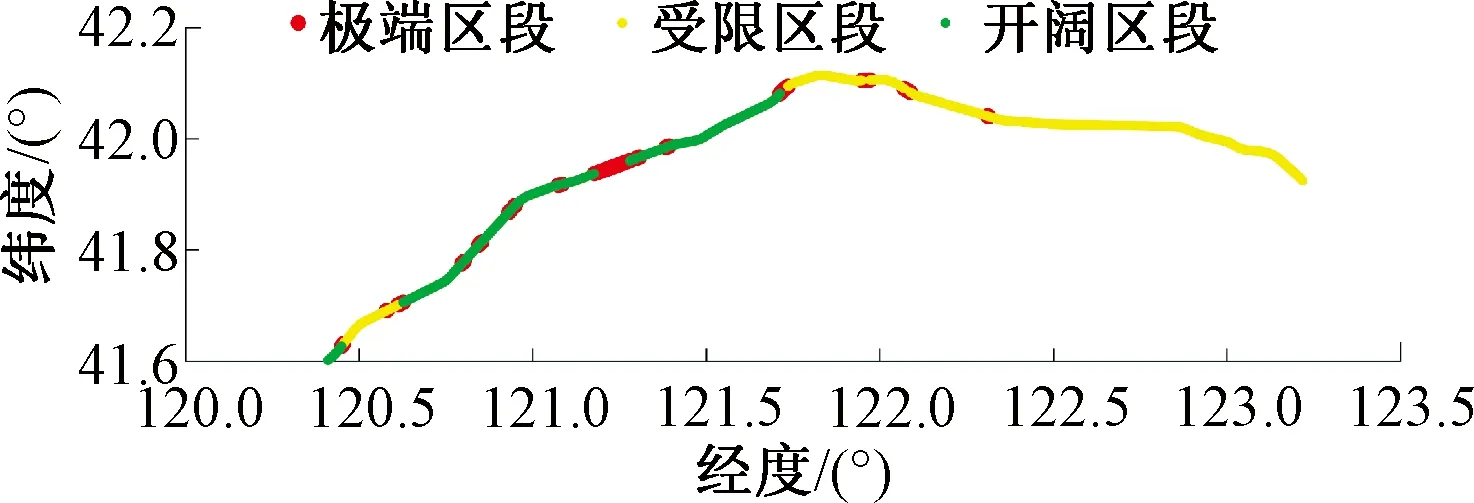
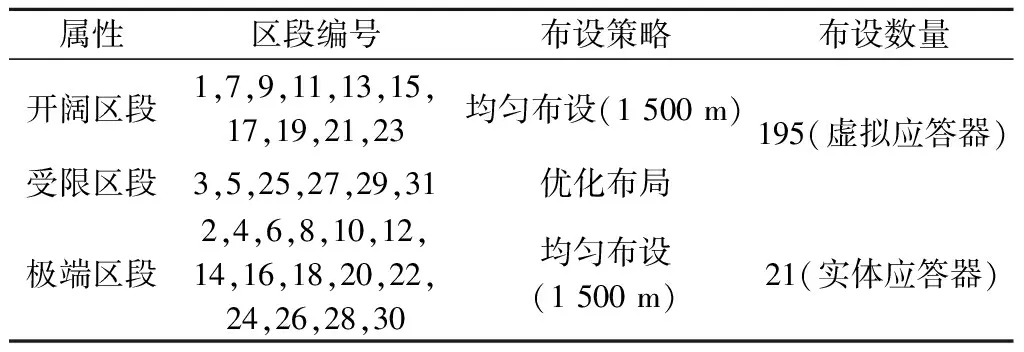
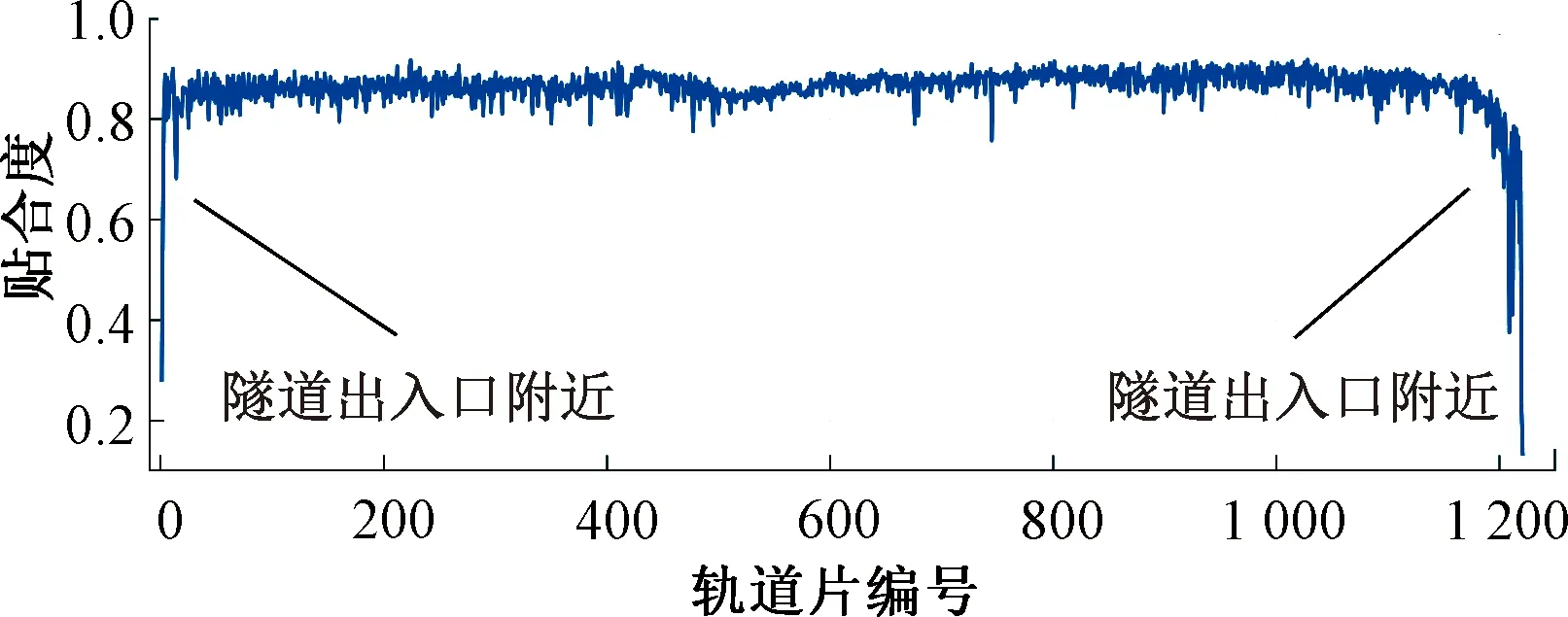
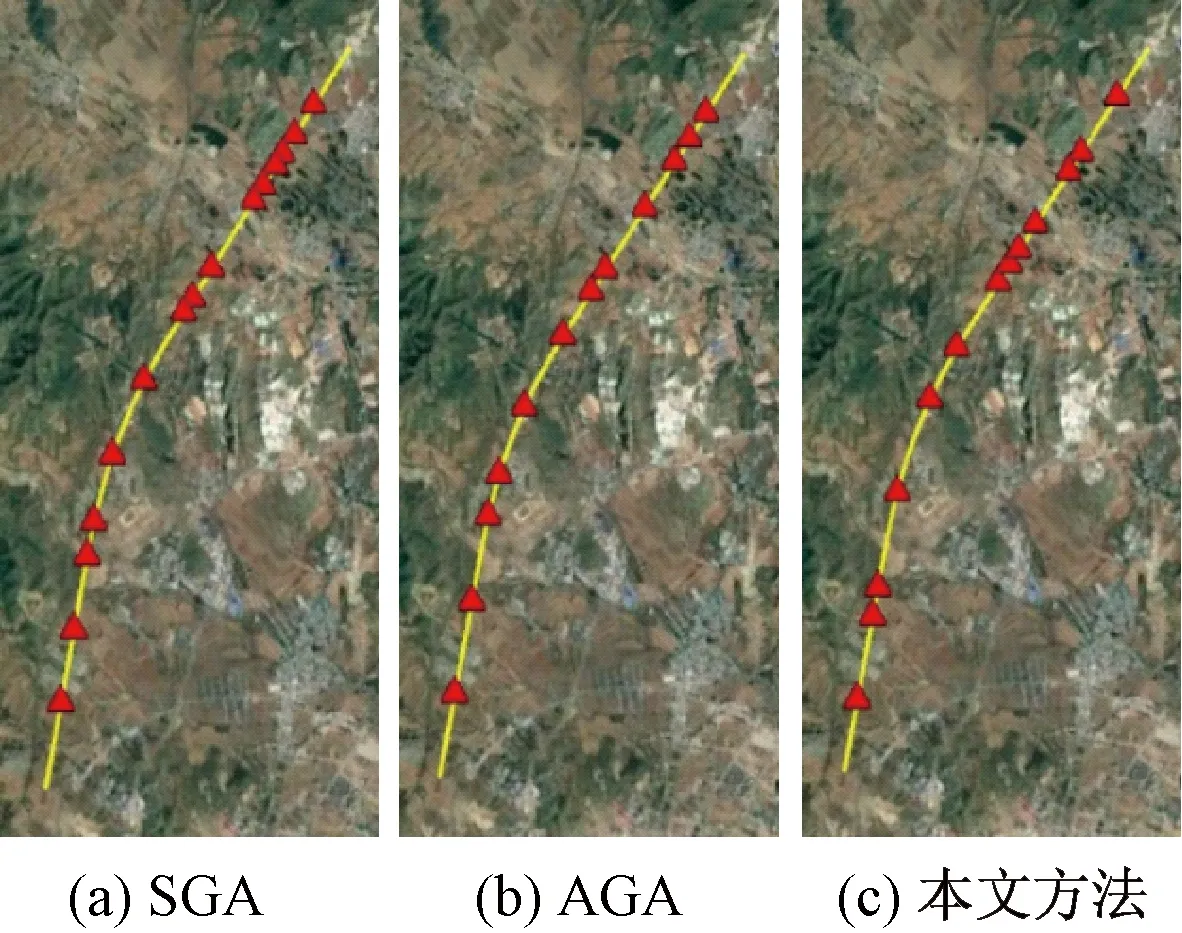
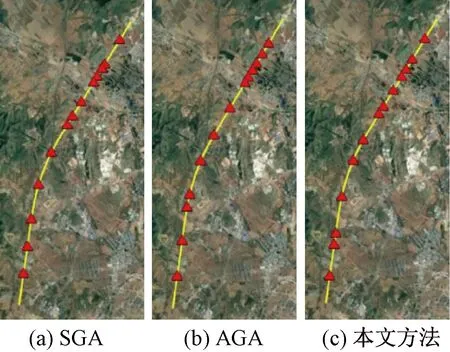
算法首先在待处理曲线的首尾之间虚连接一条直线,计算所有中间点与直线的距离;然后,寻找最大距离值Dmax,将该值与约简阈值TDP进行比较:若Dmax Step7场景聚类。约简后边界特征已变成不等长序列,采用动态时间规划(Dynamic Time Warping, DTW)算法计算不等长序列的相似性,用于具有噪声的基于密度的聚类方法(Density-Based Spatial Clustering of Applications with Noise, DBSCAN)。 DTW算法通过对序列进行拉伸或压缩计算两个序列的“最小”距离,计算式为 γi,j=d1i,2j+min(γi-1,j,γi,j-1,γi-1,j-1) ( 3 ) 式中:γi,j为序列的动态时间规划距离;d1i,2j为样本点之间的欧式距离。 DBSCAN算法是一种典型的基于密度的无监督聚类算法,该聚类算法可以有效识别边界特征中的噪声场景,其聚类结果主要取决于领域半径ε和领域密度阈值MinPts,参数取值不同,其聚类簇数、簇内和簇间性能存在较大差异。该算法首先根据给定参数找出所有核心对象,然后,以任一核心对象为出发点,找出由其密度可达的样本生成聚类簇,直到所有核心对象均被访问过为止。表2为本文所提场景聚类算法的伪代码以及预期结果的可视化。 表2 场景聚类算法 定位场景聚类策略将铁路沿线卫星定位场景分为无遮挡场景、轻度遮挡场景、重度遮挡场景、全遮挡场景等局域类别,不同局域定位场景卫星定位性能存在显著差异。由于铁路沿线卫星定位场景复杂多变,部分线路区域定位场景频繁转换,单一场景特征覆盖的线路长度有限,较难确定VB的位置,为进一步简化VB的布局方法,采用区段延拓思想,将以上多种定位场景进行组合,延拓后分为开阔、受限、极端共三类区段,在不同类区段结合现有虚拟应答器和实体应答器布设原则选用不同的虚拟应答器布局策略。 (1)开阔区段:多数为无遮挡场景,存在少数部分遮挡场景,卫星定位性能较为稳定,在该类区段采用等间隔均匀布设VB的策略; (2)受限区段:由部分遮挡场景和无遮挡场景组成,在该类区段定位场景频繁交换,卫星定位性能存在较大的波动,可采用基于改进遗传算法的VB布局优化方法,选择卫星定位性能优越的位置布设VB; (3)极端区段:多由全遮挡场景和部分遮挡场景组成,卫星信号遮挡严重,在该类区段将不布设VB。 为确定三类区段的长度,使得区段长度足以满足相应布设策略的最低要求,且实现不同类区段对区段内场景交换频数(区段内相邻轨道片的局域定位场景不一致的次数)的要求,按如下方式实施区段延拓: 首先,合并相邻定位场景一致的轨道片,确定场景长度。 然后,根据全线不同定位场景的天空可见度统计结果,确定不同类型局域定位场景的卫星信号遮挡程度。将定位场景按相应天空可见度均值进行降序排序,设置场景最大交换频数Fmax和待合并定位场景长度上限值Lmax,根据定位场景排序结果逐一进行场景合并,得到至少包含两种不同类型定位场景的混合场景,经过合并的混合场景将不再进行二次合并。 最后,设置区段内任一类型定位场景总长度占区段长度的百分比阈值R,默认天空可见度最低的混合场景为极端区段,以极端区段作为部分区段分界线,结合阈值R确定其余两类区段。 在上述方案确保能够确定目标线路不同类别区段的划分后,整体VB布设的关键问题即为受限区段的VB布局优化策略。 本文提出一种基于改进遗传算法的VB布局优化方法,提取列车往复运行积累的历史运行数据,统计区段轨道片卫星观测质量指标,如表3所示,结合现有应答器布设原则,采用改进的单目标遗传算法确定受限区段VB最佳布设方案。 表3 卫星观测质量指标 3.2.1 目标函数的确定 以上多个卫星观测质量指标综合反映了各轨道片卫星定位整体性能,结合多个卫星观测质量指标确定受限区段VB最佳布设方案是一个多目标优化问题,为简化寻优过程,采用逼近理想解法(Technique for Order Preference by Similarity to Ideal Solution, TOPSIS)将多目标优化问题转变为单目标优化问题,通过构建理想最优指标集和理想最劣指标集,计算目标指标与理想指标集的距离,获得目标与理想解的贴合度,将多目标(卫星观测质量指标)优化问题转为单目标(贴合度)优化问题。 3.2.2 约束条件的确定 在充分考虑卫星定位性能的前提下,VB布设密度也是需要考虑的因素。VB布设距离较近时,在卫星定位接收机输出频率一定的情况下,相邻列车定位位置可能经过多个VB,增加VB漏捕获风险,且用于VB捕获触发报文传输时间将大大减小,限制了VB捕获功能的有效实现;VB布设距离较远时,列车在连续两个VB之间运行中,随着轮轴测速测距误差的积累,列车定位误差水平可能因未得到及时校正而超过限定,无法满足列控系统需求。因此,结合现有实体应答器布设原则,确定VB最大布设间隔dmax和最小布设间隔dmin,作为遗传算法求解的距离约束条件,其数学函数模型可表示为 ( 4 ) s.t.So≤si≤SD ∀idmin≤|si+1-si|≤dmax 式中:n为区段布设虚拟应答器的数量;So为区段起始里程;SD为区段终止里程;si表示布设第i个虚拟应答器的里程;c(si)为布设位置的贴合度。 3.2.3 函数模型求解 遗传算法(Genetic Algorithm, GA)是模拟自然界生物进化机制解决搜索问题的一种通用算法,该算法广泛应用于单目标优化和多目标优化领域。但是,该算法存在收敛速度慢、局部搜索能力较差等问题,本文引入带有学习能力的麻雀搜索算子通过引导变异算子的变异方向,增加遗传算法的局部搜索能力。 麻雀搜索算法(Sparrow Search Algorithm, SSA)是由Xue和Shen[14]于2020年提出的一种新颖的群体智能优化算法,受麻雀的觅食行为和反捕食行为的启发而提出,算法具有寻优能力强、收敛速度快等优点,其搜索过程分为探索者位置更新、跟随者位置更新以及反捕食行为。 探索者用于提供觅食区域和方向,其更新过程为 ( 5 ) 式中:X=[x1x2…xn]为麻雀位置,n为麻雀总数;itermax为最大迭代次数;i为迭代次数;∂为[0,1]内的随机数;Q为服从正态分布的随机数;L为元素全为1的矩阵;R2(R2∈[0,1])和ST(ST∈[0.5,1])分别为预警值和安全值。 跟随者监视探索者随时争夺食物,其更新过程为 ( 6 ) 当麻雀意识到危险时,会做出反捕食行为,其更新过程为 ( 7 ) 式中:fi为适应度值;fg、fw分别为当前最优、最差适应度值;K为[-1,1]内的随机数;ε为避免分母为0的常数。 本文基于改进的遗传算法通过编码、种群初始化、选择算子、交叉算子、变异算子、麻雀算子以及保留策略共7个步骤,快速求取受限区段虚拟应答器布局优化问题的最佳布设方案,具体实施步骤如下: Step1编码。针对虚拟应答器位置的一维里程属性,采取实数编码方式。一个染色体代表受限区段一种可行的VB布设方案,染色体上的基因代表VB拟选位置,基因数量可变,以实现VB布设数量的优化。 Step2种群初始化。初始化种群的分布对算法求解的全局收敛性具有较大的影响,为确保初始种群的随机性,采用满足距离约束的随机生成方法产生个体。 Step3选择算子。采用二进制锦标赛机制选择父种群的两个个体作为双亲,即从种群中随机选择两个个体,选择适应度值较高的个体进行遗传操作。 Step4交叉算子。采用单点交叉,随机产生交叉点。实行交叉时,由于VB布设距离约束,需对新产生的个体进行部分VB位置修正。 Step5变异算子。根据变异概率对种群中选定个体的某些基因座上的基因值进行变动,产生新的个体。本文采用多点变异方法,确定待变异的基因。 Step6麻雀算子。麻雀算子用于辅助引导个体朝着局部最优解的方向变异,根据VB布设距离约束确定变异基因的可活动范围,采用麻雀算子在该范围内进行局部寻优,确定基因位置。 Step7保留策略。通过比较父代和子代的个体适应度值,保留适应度值较高的个体,避免优秀的个体在进化过程中遭遇淘汰,且保留个体不重复以增加种群的多样性。 上述基于局域定位场景聚类的虚拟应答器布局优化方法可以通过图4所示的处理流程对VB布局优化方法进行总结。 图4 基于局域定位场景聚类的虚拟应答器布局优化方法 本文所提出的VB布局优化方法从卫星信号遮挡情况出发,充分利用了卫星定位的可用性、精确性和完好性,且结合现有虚拟应答器和实体应答器布设原则,不是简单的将VB等间距布设在轨道线路上,而是适应其应用需求形成了定制化方案。 总结来看,本文所提出的方法具有以下特点: (1)在VB布局优化过程中由于引入了铁路沿线卫星定位场景聚类方法,能够根据定位场景确定区段卫星定位性能,采用不同的VB布设策略,简化了列车运行全线VB的布设。 (2)基于改进遗传算法的VB布局优化方法,首次将VB布设问题转为数学函数寻优问题,使用反映卫星定位性能的卫星观测质量指标建立目标函数,现有VB布设原则作为约束条件,使用改进的遗传算法求解VB最佳布设位置。 (3)在采用遗传算法求解VB布设优化问题时,引入了TOPSIS算法实现目标函数的转换,降低了算法求解的复杂度,提高了求解效率;引入了麻雀算子改进标准遗传算法,提高了算法收敛速度和局部寻优能力。 本文采用2018年8、9月在京沈高铁(朝阳—沈阳西段)现场采集的卫星定位数据对所提出的VB布设方法进行验证分析。试验线路途径朝阳、北票、乌兰木图、阜新、黑山北、新民北、沈阳西7个车站,存在隧道15座,铁路沿线环境具有明显的多样性。列车运行线路见图5。 图5 京沈线列车运行线路 列车在线路上运行时,其定位模式包括单GPS、单BDS以及GPS和BDS组合定位,为确保数据充足,避免因样本不足导致轨道片误分类的情况发生,本次仿真实验叠加了三种定位模式(多天、多趟列车往返数据),共有364 611条观测信息。根据线路轨道电子地图数据,以10 m为间隔进行等间隔划分轨道片,共划分为25 087个轨道片。利用以上数据,按照本文所述方法进行虚拟应答器选址布局设计,并从场景聚类和布局优化两个方面进行具体分析。 根据轨道片位置和定位信息确定每个轨道片的导航卫星观测信息,设置卫星仰角阈值为5°、信噪比阈值为30 dB、边界卫星带宽为10°,约简阈值为3°,确定可见卫星和边界卫星,图6(a)显示了1号轨道片的所有可见卫星、边界卫星以及拟合可见天空轮廓的情况,图6(b)显示了其边界特征,可以看出,该轨道片周围环境较为开阔,能够支持较高的卫星定位性能水平,光滑样条的拟合结果可以较好的描绘出轨道片上空可见轮廓的细节,且仅使用12个边界特征点便足以表示1号轨道片的可见天空轮廓,相比于约简前边界特征,约简率达到96.6%。图7显示了全线天空可见度的分布情况,局部视图中显示了所选线路隧道出入口附近的可见天空轮廓。 图6 1号轨道片卫星天空图及其边界特征 图7 全线天空可见度 为定量分析约简算法在全部轨道片的约简情况,图8给出了约简最大误差Dmax和约简率的统计结果,可见,所有轨道片的约简误差的最大值均未超过预设的约简阈值,在卫星信号全遮挡区域,可见天空轮廓约简为两个边界特征点,约简率达到99.4%,且约简误差保持在较低水平。 图8 全线边界特征的约简误差和约简率 利用所得边界特征,进行基于DTW距离度量的场景聚类。图9显示了所选两个轨道片的“最小距离”路径,其中间图形的颜色表示对应序列位的距离,所选两个轨道片的边界特征长度不等,通过特征序列匹配,得到其DTW距离为70.415 2°。 图9 所选两个轨道片的“最小距离”路径示意 本文设置每类至少包含100个样本,即DBSCAN算法的领域密度阈值MinPts为100,根据聚类算法内部评价指标确定领域半径ε,所选指标有紧密性(CP)、间隔性(SP)和戴维森堡丁指数(DBI),其中,CP是类内每一样本到类中心的平均距离,该值越小,类内距离越近;SP是类中心的平均距离,该值越大,类间距离越远;DBI计算任意两类的类内平均距离之和除以两聚类中心距离的最大值,该值越小意味着类内距离越小,同时类间距离越大。表4显示了不同预设参数下评价指标的统计结果,可见,当MinPts为100、ε取40时,类内距离较小,类间距离较大,综合聚类性能较好,因此,确定ε为40,最佳聚类簇数为3。 表4 聚类算法内部评价指标 图10显示了定位场景在线路上的分布情况,其中,场景1代表开阔场景,场景2代表全遮挡场景,场景3代表部分遮挡场景。图11为线路典型场景的边界特征。存在桥梁遮挡的线路被识别为全遮挡场景,桥梁附近存在部分遮挡和开阔场景的交替;存在丛林遮挡的线路被识别为开阔场景或部分遮挡场景;存在隧道的线路被识别为全遮挡场景,在隧道出入口处由于隧道所在方向可能存在部分遮挡,被识别为部分遮挡场景或开阔场景;存在路堑的线路部分,由于遮挡高度不同,存在部分遮挡场景和开阔场景的交替,总体而言,算法聚类结果符合预期。表5显示了各场景数量以及场景内卫星观测质量指标的统计结果,其中,场景2为全遮挡区域,不存在卫星观测质量指标,各场景之间具有较为明显的差异。 表5 场景属性统计 图10 线路场景分布 根据多次试验以及对场景聚类结果的统计,设置区段延拓参数Fmax为5、Lmax为1 000 m,进行区段延拓,确定布设区段。图12显示了全线区段分布情况。全线共分为31个区段,其中,受限区段有6个,累积长度约为138.29 km。 图12 全线区段延拓所得分布结果 根据CTCS-3级列控系统应答器应用原则和区段延拓结果,在开阔区段和极端区段采用等间隔1 500 m布设策略分别布设虚拟应答器和实体应答器,在受限区段采用优化策略(最小布设间隔为200 m,最大布设间隔为1 500 m)确定布设方案。考虑到相邻区段的衔接部分,在不改变受限区段布设结果的情况下,以尽量减小布设数量且满足布设距离要求为目标调整临近区段的相邻应答器位置,表6和图13显示了基于局域定位场景聚类的VB布局结果,全线共216个应答器。 表6 全线应答器布设结果统计 本文重点关注在受限区段基于改进遗传算法的VB布局优化方法。设置种群规模pop=20,交叉概率为0.9、变异概率为0.1,迭代次数为250代,以第3个区段为例,该区段长度为12.307 km,图13局部视图显视了其线路上VB的布设情况。 图14显示了该区段所有轨道片的贴合度统计结果,区段的边界是隧道的出入口附近,卫星定位性能较差,其所在轨道片的卫星观测质量指标较差,贴合度较低,而中间部分轨道片遮挡程度较轻,其贴合度较大,但存在波动。表7为布局优化后该区段VB布设距离和布设位置贴合度的统计结果,可见,VB布设距离均满足要求,且布设位置的贴合度较高。 图14 区段轨道片贴合度统计 为验证本文所提改进遗传算法在求解VB布局优化问题时的性能,选取标准遗传算法(Simple Genetic Algorithm, SGA)和自适应遗传算法(Adaptive Genetic Algorithm, AGA)[15]进行对比分析,三种算法设置相同的参数和初始种群。图15和图16分别显示了三种算法在迭代到28次和250次,VB的分布情况。 图15 第28次迭代 图16 第250次迭代 由图15和图16可知,在第28次迭代时,三种算法的虚拟应答器布设数量和布设位置存在差异,在250次迭代后,三种算法的VB布设数量均已收敛,但布设位置仍存在差异,导致布设方案贴合度不同,体现了三种算法在寻优能力方面的差异。图17统计了迭代过程中虚拟应答器数量以及方案贴合度均值,可见,在收敛速度方面,本文所提方法的收敛速度最快,算法迭代28次后基本收敛,SGA和AGA算法收敛速度较慢;在寻优能力方法,本文所提方法求解的VB布设方案贴合度均值最大,为0.905 6,SGA和AGA算法所求方案的贴合度均值较小。总体而言,本文所提出的方法在VB布局优化方面优于SGA和AGA算法。 本文针对虚拟应答器的布局需求,提出一种基于局域定位场景聚类的虚拟应答器布局优化方法,从铁路沿线环境遮挡情况出发,根据列车历史定位数据,重构铁路沿线卫星可见天空轮廓,完成局域定位场景聚类方法;采用区段延拓思想确定VB布设区段,在受限区段,采用改进的遗传算法优化VB布局。本文所述方法结合了现有应答器布设原则,充分考虑了线路上候选VB位置的卫星可见性特征,避免了因卫星定位性能不足,引起VB捕获误差较大的风险,相比沿线使用GNSS进行连续定位的苛刻要求,只需保证VB布设位置的卫星定位性能支撑条件,所提出的方法解决了VB功能实现的本质能力保障问题。 论文后续工作将进一步关注线路卫星定位性能的精细分类方法,引入多目标优化策略进一步提高VB布局优化能力,并结合实际数据测试检验所提出的方法对VB捕获判定与报文触发时空性能的影响。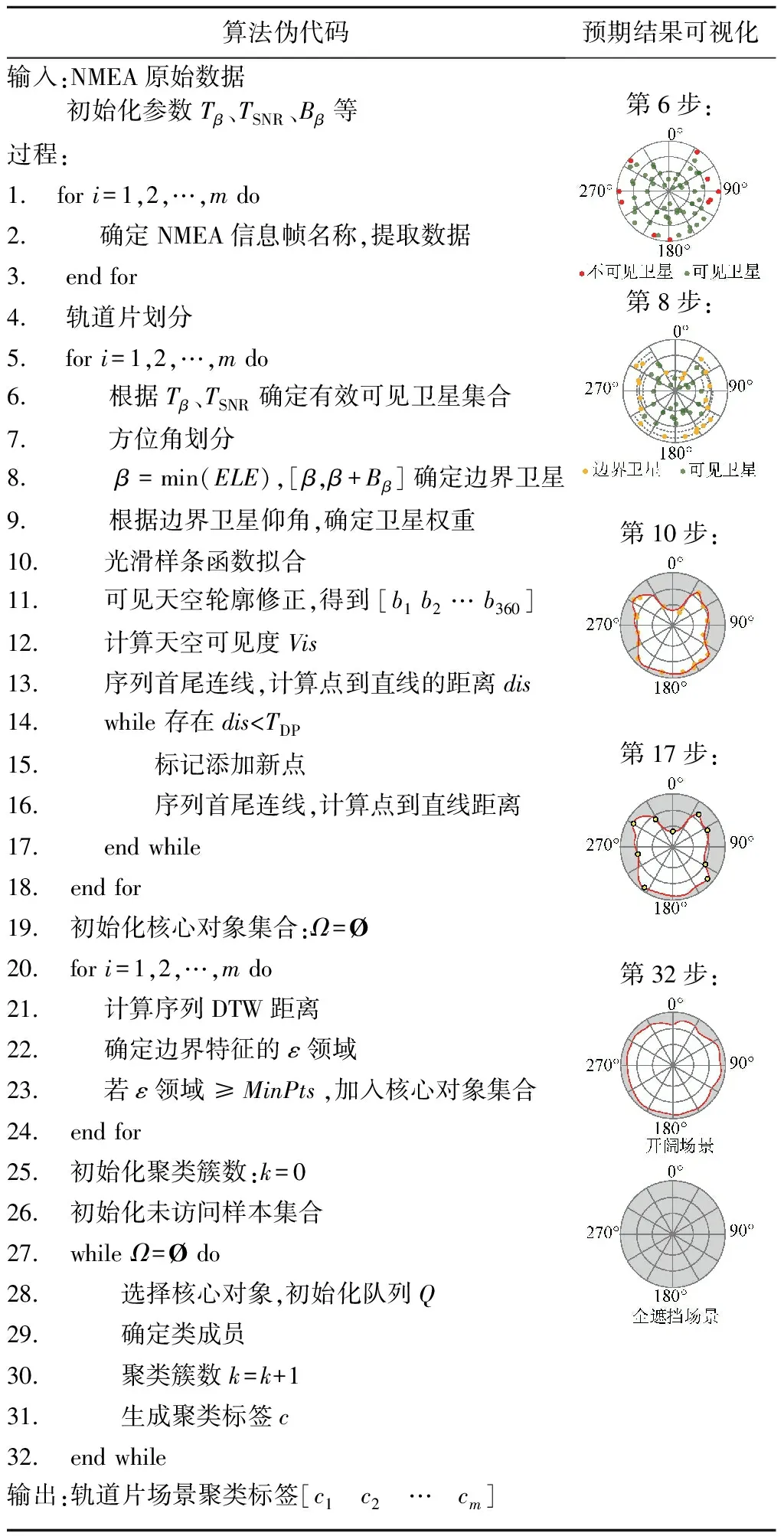
3 虚拟应答器布局优化方法
3.1 布设策略
3.2 受限区段优选策略


3.3 方法总结
4 验证与分析
4.1 实验线路及数据准备

4.2 场景聚类方法验证

4.3 布局优化方法验证
5 结论
猜你喜欢
云南画报(2021年11期)2022-01-18
铁道通信信号(2020年9期)2020-02-06
成都信息工程大学学报(2019年2期)2019-08-28
铁道通信信号(2018年8期)2018-11-10
铁道通信信号(2018年8期)2018-11-10
自动化学报(2018年2期)2018-04-12
成都信息工程大学学报(2017年1期)2017-07-21
铁道通信信号(2016年4期)2016-06-01
铁道通信信号(2016年4期)2016-06-01
城市轨道交通研究(2015年11期)2015-02-27
