
屏蔽门轨道槽随动保护机构的设计分析
2023-09-08 03:06:24邵晓宙康文凯李哲宇郝晓华
现代制造技术与装备 2023年7期
温 毅 李 龙 邵晓宙 康文凯 李哲宇 张 东 郝晓华
(中国辐射防护研究院,太原 030000)
随着核工业的发展,放射性场所逐渐增多,接触电离辐射的人员也越来越多。人体在受到超剂量辐射时会引起全身性损伤,因此在人与放射性物质之间必须进行有效屏蔽。以核电站为例,其在运营中往往会产生放射性废物。在对这些放射性物质进行分类收集、净化浓缩、减容固化、就地暂存和集中处置等操作时,为满足人员与物料的出入需求以及对电离辐射的屏蔽要求,通常需要在人员与物料出入口处安装屏蔽门[1]。
研究普遍认为,2060年光伏、风电、水电和核电等非化石能源发电占比将提高到80%~93%,风电和太阳能发电量占比将从当前的9.5%增长至59.6%~70%,核电发电量将从当前的5%增长至10%~18%,核电的装机容量将是现在装机容量的4.6~6.6倍,达到2.3亿~3.3亿kW[2]。这意味着需要处理大量的放射性废物,使用更加方便的屏蔽门。
对于屏蔽能力要求高的电动推拉屏蔽门,通常厚度比较大,地面的轨道槽宽度也比较大,人员通过时必须跨过轨道槽。在转运设备时,通常是在屏蔽门打开后临时安装挡板,设备转运完成后再拆掉挡板,使用不方便且存在一定的安全隐患。为满足人员安全通行和物项转运的需求,需要利用轨道槽随动保护机构来保护轨道槽。该机构覆盖于轨道槽上方,与两侧底面平齐,可实现自动跟随屏蔽门运动,根据屏蔽门轨道槽的长度自动调整两侧长度,实时完成对轨道槽的完全遮蔽,从而有效提升人员通过的安全性和物项转运的便利性[3]。
为了保证轨道槽随动保护机构能够实时跟随屏蔽门运动,通过可编程逻辑控制器(Programmable Logic Controller,PLC)系统进行控制。PLC系统采用可编程的存储器,在内部存储中执行逻辑运算、顺序控制、定时、计数和算术运算等操作指令,通过数字式或模拟式的输入输出来控制各种类型的机械设备或生产过程。比例-积分-微分(Proportion-Integral-Differential,PID)算法具有原理简单、鲁棒性强和适应性广等优点,属于最基本的控制方式[4-5]。
1 随动保护机构设计
1.1 随动保护机构基本原理
随动机构由轨道装置、轨道槽保护链板装置、链板收放装置和链板放紧装置组成。轨道槽保护链板在轨道上运行,屏蔽门由减速电机驱动完成平移运动。减速电机转动时,控制系统控制两个链板收放装置的驱动电机转动,完成屏蔽门运动方向链板的收卷。屏蔽门运动相反方向的链板收放装置放出链板,轨道槽上方链板在轨道装置上随着屏蔽门运动,从而保证轨道槽上方始终有挡板保护,完成对轨道槽的保护。屏蔽门轨道槽随动保护机构如图1所示,其中链板放紧调节装置能够调节链板的张紧程度。

图1 屏蔽门轨道槽随动保护机构
1.2 各装置结构组成及功能说明
链板结构由多块链板铰接而成,如图2所示。两块链板可绕中间链连接轴相对转动,在具备承重能力的同时缠绕到链板收放装置上。轨道装置由滚轮和安装槽组成,滚轮安装在安装槽中,链板在滚轮上方运动。屏蔽门轨道槽两侧开设轨道装置安装槽,保证轨道装置安装后,链板在轨道轮上运行时与两侧地面平齐。
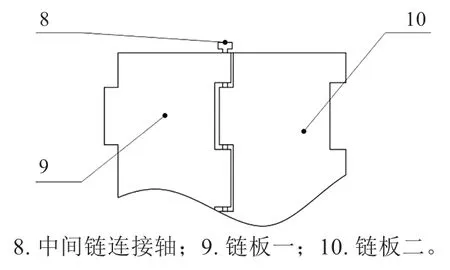
图2 链板结构
链板收放装置由驱动电机、传动链条和链板卷筒组成,其中驱动电机为可变频调速的减速电机,通过传动链条驱动链板卷筒正反转完成对链板的收起和释放,并通过调节驱动电机的转速控制链板收起和释放的速度[6]。
屏蔽门与链板通过链板放紧调节装置连接,利用调节弹簧的伸缩来补偿收放速度和瞬时速度差造成的间隙。链板放紧调节装置由连接调节弹簧和距离传感器组成,其中距离传感器能够实时测量链板与屏蔽门间的距离,并将数据转化为电信号传递给PLC控制系统。PLC根据链板与屏蔽门的距离,调整链板放紧调节装置驱动电机的转速,将距离控制在设计范围内。
2 控制系统总体设计
2.1 控制系统组成
屏蔽门随动保护机构控制系统的核心为PLC控制器和变频器。PLC控制变频器输出频率,共同控制链板驱动电机。控制系统组成如图3所示。
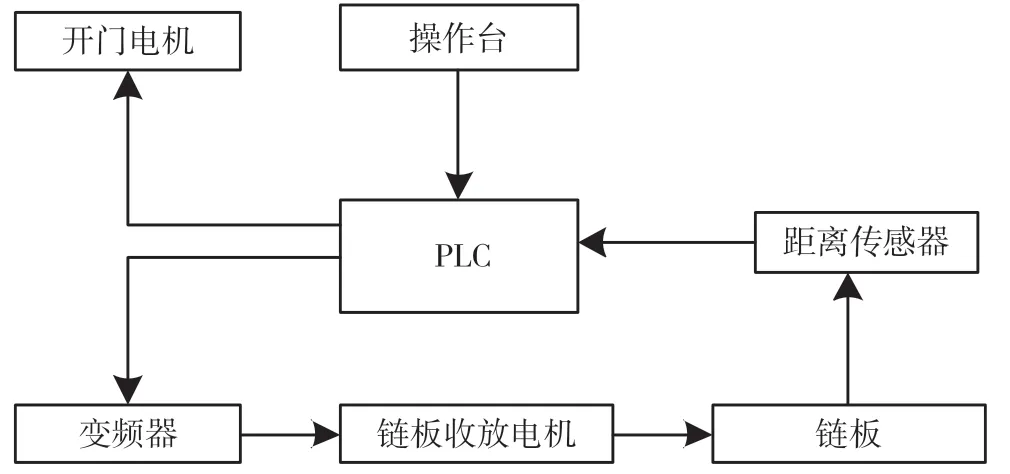
图3 控制系统组成
操作台是提升机的操控核心,发送对门的操作指令。距离传感器实时采集链板与屏蔽门之间的相对运行距离数据,并将数据传送至PLC。PLC分析所得数据,并发出指令控制屏蔽门与链板装置协调运动。发生异常时,PLC立即发出指令,电机停止运转。
2.2 调速原理
系统采用变频器变频调速的方式对驱动电机进行正反转控制。使用变频器进行变频调速,具有响应速度快、调速范围宽和速度可控性好等优点,同时具备软启动功能、瞬时停电自动再启动功能、跳跃共振频率点功能及在线自整定功能等多种保护功能[7]。
变频器根据PLC指令将50 Hz或60 Hz的工频电源变换成各种频率的交流电源,实现电机的变速运行。其中,控制电路完成对主电路的控制,整流电路将交流电变换成直流电,直流中间电路对整流电路的输出进行平滑滤波,逆变电路将直流电再逆变成交流电。
2.3 PID控制
调速时,PLC控制系统通过距离传感器获得链板与屏蔽门间的实际距离值,并利用PID控制法计算距离偏差值,根据运算结果调节变频器频率及电机转速。PID控制算法是结合比例、积分和微分3种环节于一体的控制算法,通过调节P、I、D这3项参数得到对控制系统的控制方法[8]。
(1)比例部分。它的作用是按比例反映控制系统的偏差信号,偏差一旦产生,控制器立即产生与偏差成正比的控制信号,以减小偏差。它构成链板与屏蔽门间隙的比值控制部分,比例调节系数KP越大,比值控制作用越强。但KP过大会引起控制系统输出的不稳定,在调节过程中造成屏蔽门与链板间距离过大或过小。
(2)积分部分。只要系统存在偏差,积分控制就不断积累并输出控制量,以消除偏差,减小稳态误差。积分控制作用的强弱取决于积分时间常数的大小。工程应用时要避免积分作用过强,以免造成控制系统输出振荡,使链板不断振荡。需要注意,如果积分作用太弱,则会导致稳态误差过大。
(3)微分部分。它的作用通过微分时间常数来体现。微分部分能够反映偏差信号的变化趋势,并能在偏差信号值变化过大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,缩短调节时间,改善系统的动态性能。如果微分部分的作用过强,会造成响应过程提前制动,从而延长调节时间;如果微分部分的作用太弱,则会导致动态偏差增大。
3 控制系统具体设计
3.1 PLC选型
德国西门子公司生产的PLC控制器广泛应用于我国的化工和汽车制造等领域。其中,西门子S7系列PLC体积小、速度快、标准程度化高,具有网络通信能力,功能更强,可靠性更高。因此,本次设计选择西门子S7系列的PLC控制器。
3.2 PLC端口统计
PLC的输入信号有两种,一种是距离传感器输入的距离信号,一种是控制台输入的针对屏蔽门的控制信号。PLC的输出信号也有两种,一种是控制变频器输出频率的控制信号,一种是控制电机启停及正反转的控制信号。PLC输入端口统计如表1所示。

表1 PLC输入端口统计
3.3 PLC程序设计
链板与屏蔽门之间通过弹簧连接。弹簧在张紧链板的同时能够调整链板与屏蔽门之间的距离。在PLC内部设定屏蔽门与连接链板间距离的最大值为Lmax,最小值为Lmin,设计值为L。开门与关门控制流程图,如图4所示。
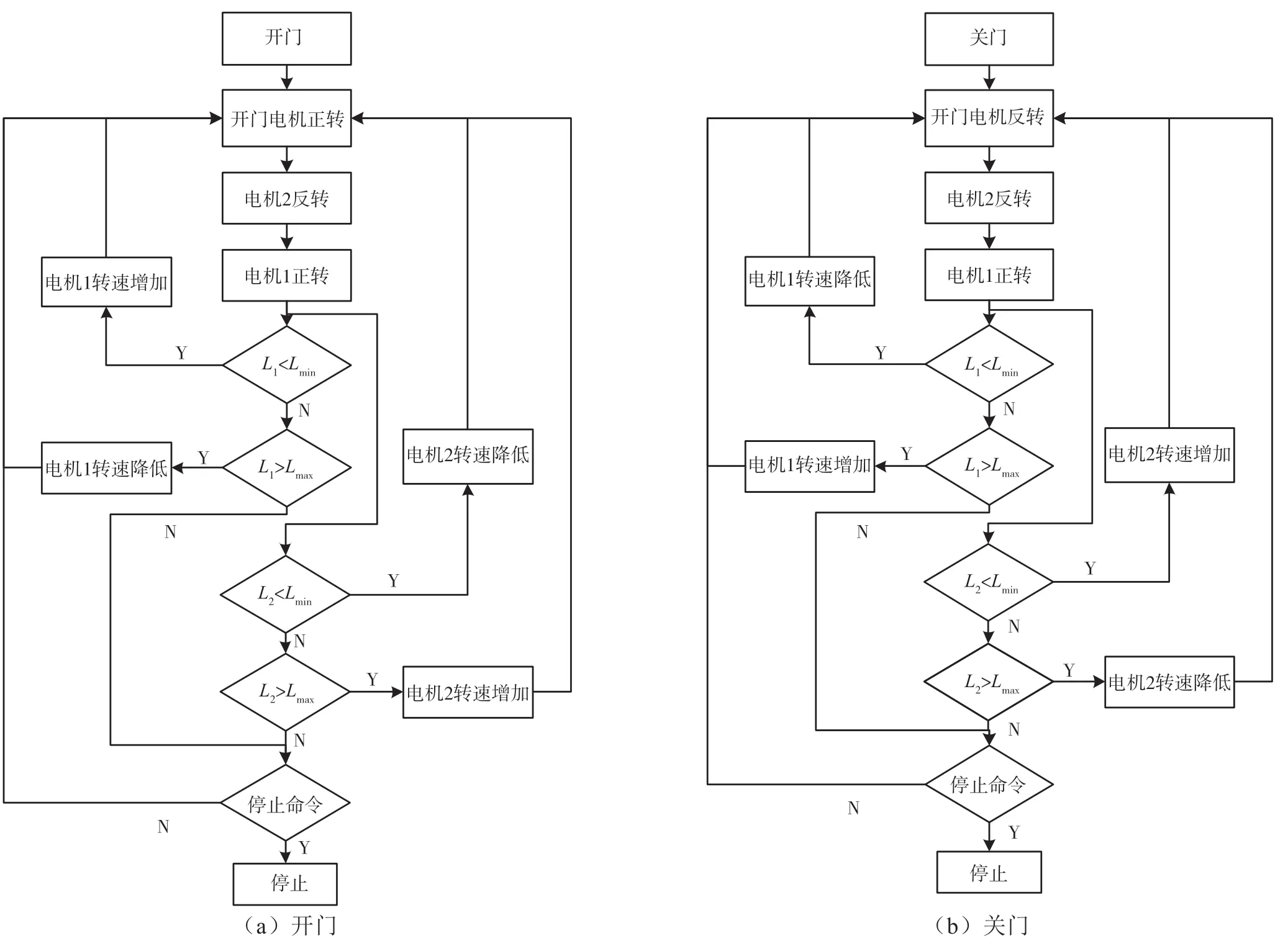
图4 控制流程图
按下开门按钮,开门电机正转,屏蔽门向左运动,两个链板收放电机正转,PLC根据距离传感器传回的信号调节电机的转速,保证系统平稳运行。PLC系统根据屏蔽门两侧距离传感器传输的距离信号,实时调整两边电机的转速。假设链板收放装置一距离屏蔽门为L1,链板收放装置二距离屏蔽门为L2。当L1<Lmin时,电机1保持正转并增加转速;当L1>Lmax时,电机1保持正转并降低转速;当L2<Lmin时,电机2保持正转并降低转速;当L2>Lmax时,电机2保持正转并提高转速。按下停止按钮,开门电机、链板收放电机1和链板收放电机2停止转动。
按下关门按钮,开门电机反转,屏蔽门向右运动,两个链板收放电机反转,PLC根据距离传感器传回的信号调节电机的转速,保证系统平稳运行。PLC系统根据屏蔽门两侧距离传感器传输的距离信号,实时调整两边电机的转速。当L1<Lmin时,电机1保持反转并降低转速;当L1>Lmax时,电机1保持反转并增加转速;当L2<Lmin时,电机2保持反转并增加转速;当L2>Lmax时,电机2保持反转并降低转速。按下停止按钮,开门电机、链板收放电机1和链板收放电机2停止转动。
3 结语
该屏蔽门轨道槽随动保护机构在设计时,充分考虑了应用场合的情况,并以满足实际需求为导向不断完善设计。该机构能够跟随屏蔽门的运动自动完成对轨道槽的遮盖,不仅能够防止人员失误掉进轨道槽,还极大地方便了人员与物料的进出。
猜你喜欢
机械工业标准化与质量(2023年8期)2023-09-25 03:23:52
科学家(2021年24期)2021-04-25 17:56:42
防爆电机(2020年3期)2020-11-06 09:07:42
设备管理与维修(2019年4期)2019-05-16 03:16:56
物流技术与应用(2019年3期)2019-05-14 06:41:14
铁道通信信号(2019年3期)2019-04-25 03:00:36
测控技术(2018年5期)2018-12-09 09:04:50
铁道通信信号(2018年9期)2018-11-10 03:26:52
铁道通信信号(2018年7期)2018-08-29 01:17:06
电子制作(2017年7期)2017-06-05 09:36:13
