
基于多传感器信息融合的大型船舶机械通风设计和制造
2023-09-08 03:06:12许雅婷
现代制造技术与装备 2023年7期
许雅婷
(江苏现代造船技术有限公司,镇江 212000)
随着社会的高速发展,我国运输业不断发展。船舶运输作为我国水路运输的主要方式,对促进社会经济发展具有重要作用。近年来,船舶设备变得越来越智能化,内部结构也越来越复杂[1]。在这样的社会背景下,人们对机械通风的设计要求越来越高。尤其是在部分大型船舶中,若不及时通气,可能会造成较大的经济损失,因为在船舱中存在气流不均、梯度变化大的问题。船员在工作、生活的过程中,可能会面临温度偏高、油气较重的困境,有气流旋涡的风险,导致船舱中的设备温度持续升高,不利于工作的开展[2]。多传感器信息融合技术是近年来出现的一项新兴技术。它合理使用多个传感器,能够在时间和空间上进行互补,可以将其中的冗余信息作为故障诊断的依据[3]。当前,传感器类型越来越丰富,仅仅依靠操作员无法实现对多传感器的有效管理,需要通过信息融合技术,合理分配有限的传感器资源,保证信息融合的效果,实现对多传感器的高效管理。D-S证据理论作为多传感器信息融合技术的核心内容之一,可以有效对传播机械通风机进行故障诊断。基于此,将D-S证据理论和神经网络相结合,用于诊断大型船舶机械通风机的故障,进而更好地对其进行设计,提高工作效率的同时,为船员提供一个良好的工作环境。
1 相关理论分析
1.1 BP神经网络
反向传播(Back Propagation,BP)神经网络有输入层、隐含层和输出层。
首先,需要设置模型中的输入层和输出层,并设置其中的节点数。在输入层,模型中的节点数受小波分析的影响。为了确定模型的特征,需进一步分解层次,可以将其分为故障类型和正常状态[4]。
其次,需确定神经网络中的节点数目。因为隐含层和其他层都有着一定的关系,所以在具体的推理中可具体表示为
式中:k为隐藏层节点数目;m为输入层节点数目;n为输出层节点数目;b为修正常量。
最后,要确定模型中的激励函数,可以描述模型中的变化关系。一般会将双曲正切函数作为计算方法,具体公式为
1.2 D-S证据理论
D-S证据理论需要在费控集合上建立,可将这个集合定义为Θ,为识别框架。该集合的组成是一系列的穷举基本命题[5],在问题上的任意命题都需要在2Θ上。如果命题A是Θ的子集,那么m(A)>0,可以将A看为证据焦元,将这些焦元看为核。
借助证据体对进行定义,具体公式为
式中:Bel(A)是对命题A的支持度。
在组合规则上,Bel可以看为模型Θ中的信任函数,m为可信任的分配函数,焦元为A1、A2、A3、…、AK。
1.3 小波分析
小波分析作为一种信号分析技术,通过数字化形成相应的数字信息,可以分别对频域和时域进行处理。作为其他分析方法的补充,它被广泛应用于许多领域。通过小波分析后,信号能量的计算公式为
在对大型船舶通风机的工作状态进行分解后,能够获取一部分小波能量,并将其作为诊断特征量。使用小波分析方法分析尺度差异性的小波系数和通风机工作状态向量,随后进行归一化处理,有
式中:E为在归一化处理之后的特征向量,也可以看为大型船舶通风机中的故障诊断向量。
2 D-S证据理论下的通风故障
借助D-S证据理论对船舶通风机故障进行诊断,需要先通过多个传感器采集模型中的振动信号,并将其转变成电信号,如图1所示。
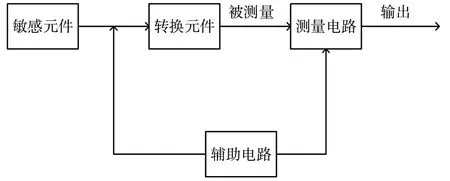
图1 传感器采集信号图
通过小波分析可有效分解相关信号,在得到相关能量特征后,发现转子不平衡是其中的主要能量特征。能量特征图如图2所示。
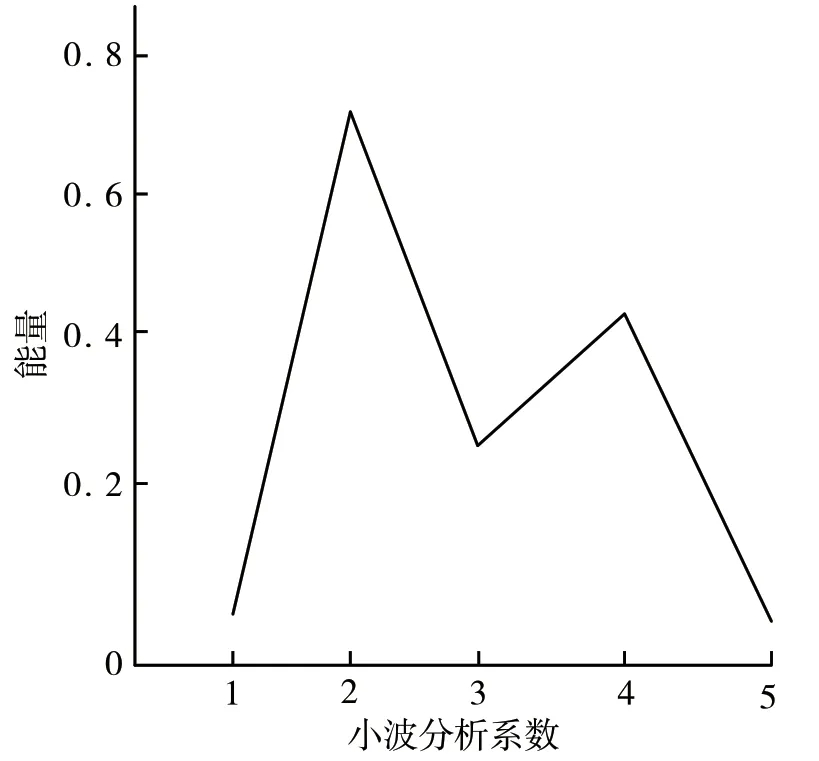
图2 转子不平衡能量特征
随后对其中的样本进行训练,建立BP神经网络模型,将所有传感器的诊断结果进行融合,使用D-S证据理论诊断其中的故障,并输出最后的结果。
3 船舶通风机械故障诊断分析
分析船舶通风机的振动特性,是进行通风设计的前提条件,能够有效监测和分析振动。研究过程中发现,故障和能量特征关系密切,具体数据如表1所示。其中,f1为平衡故障,f2为叶片故障,f0为外圈频率,fi为内圈频率,fb为特征频率,ff为保持频率。
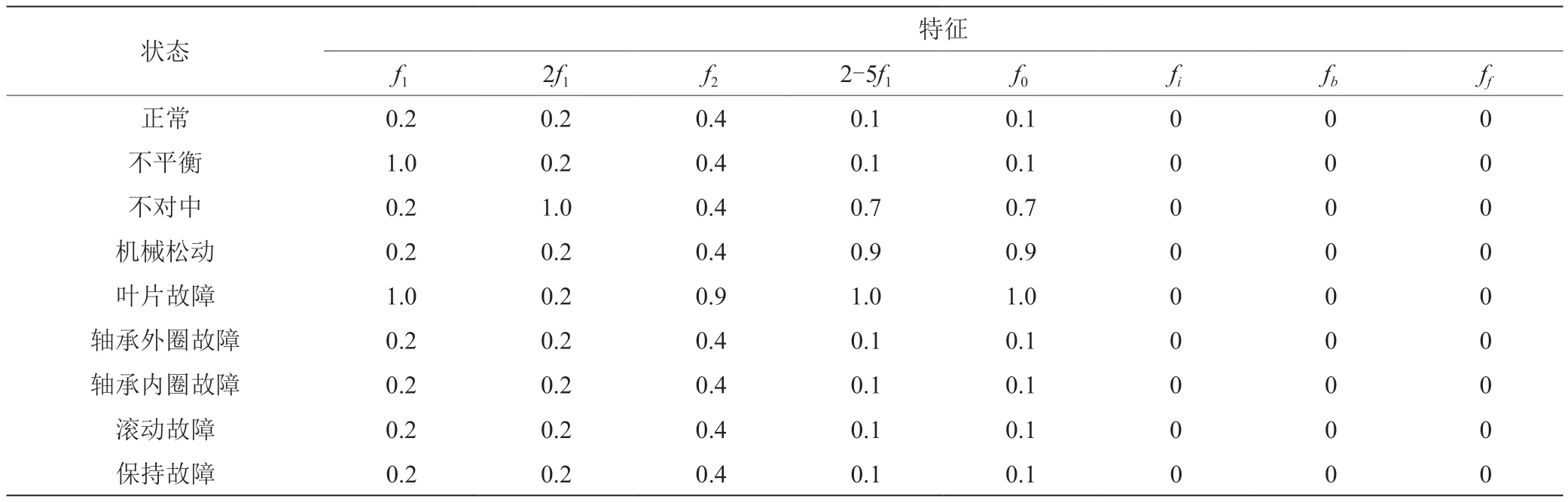
表1 故障及能量特征关系表
在振动信号中,可以通过不同的频率成分识别故障。选择应用3个传感器,在信息融合的过程中发现了4个主要故障,分别为不平衡、不对中、机械松动、叶片松动。基于不同的传感器对其进行诊断,并计算传感器中的函数值,借助D-S证据理论判断故障。
基于BP神经网络结构,将已经采集的信号进行归一化处理,共得到8个特征,并作为BP神经网络的输入点,因此可以将输入的层数定义为8。传感器在选择信任分配函数时,可以将其定义为输出层,共有4种基本故障,因此输出的节点数为4。在隐含层节点中,本次试验选择9。
将表1的数据作为神经网络训练样本,以通风机中的不平衡故障为实证研究对象。为了保证故障诊断的安全性和有效性,使用BP神经网络分析3个传感器的特征数据。不同的传感器得到的信任度不同,如表2所示。
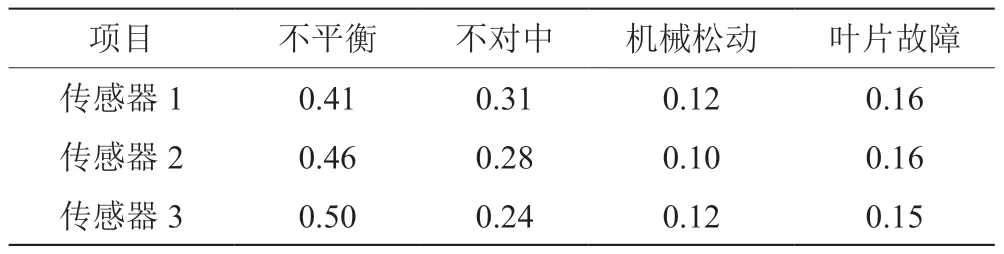
表2 信任分配结果表
应用D-S证据理论后,可以有效将传感器1和传感器2融合。融合后的结果设定为k,通过公式计算,具体的融合结果如表3所示。BP神经网络诊断后,可获取传感器1和传感器2的频率特征。将这两个数据集合融合于不平衡,得到的可信任分配为0.41、0.46,可见信任度明显提高。
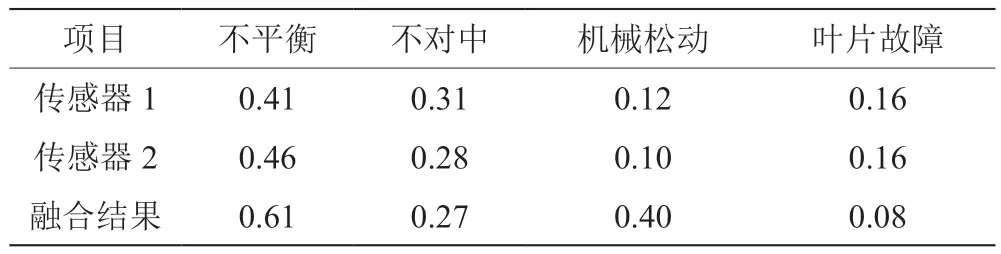
表3 传感器1和传感器2的融合结果
融合传感器1和传感器2后,还可以将其与传感器3进行融合,如表4所示。

表4 传感器1、传感器2和传感器3的融合结果
将所有的传感器进行融合后,故障基本可信任度分配有所提高,可以有效诊断故障平衡进行有效应用。
4 结语
单个传感器在信息采集上存在较大的局限性,可能会影响故障诊断结果。本次研究借助多传感器信息融合技术对大型船舶的通风系统故障进行诊断,通过多传感器收集大型船舶通风机的状态信号,使用小波分析提取相应的特征向量,并通过BP神经网络统计单个传感器诊断结果,最后使用证据理论进行多传感器融合,发现其具有较高的诊断价值,可在一定程度上提高基本可信任度,为大型船舶通风系统的正常运行提供了强有力的支持,也保证了船员正常的生活和工作,促进了经济和社会的发展。
猜你喜欢
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科学)(2019年10期)2020-01-18 09:16:22
船舶标准化工程师(2019年4期)2019-07-24 07:21:12
中国船检(2017年3期)2017-05-18 11:33:09
红土地(2016年3期)2017-01-15 13:45:22
幼儿智力世界(2016年6期)2016-05-14 13:50:51
发明与创新(2016年33期)2016-04-16 16:32:25
重庆工商大学学报(自然科学版)(2015年10期)2015-12-28 07:43:58
小雪花·初中高分作文(2015年10期)2015-10-24 04:01:58
振动、测试与诊断(2014年5期)2014-03-01 01:14:21
