基于复合传感器的机器鱼推进力预测方法研究
2023-09-02 11:26:38高皓宇郭松子成海炎张进华
数字海洋与水下攻防 2023年4期
高皓宇,郭松子,姜 晟,成海炎,方 斌,张进华,*,洪 军
(1.西安交通大学 教育部现代设计与转子轴承重点实验室,陕西 西安 710049;2.中国舰船研究设计中心,湖北 武汉 430034)
0引言
近年来,随着对鱼类运动的研究得到了极大的扩展,研究人员逐渐开始进行一系列针对各种生物鱼类特性的新型仿生机器鱼的研发工作。然而复杂多变的水下环境会极大地干扰仿生机器鱼的正常运动和任务执行,难以获取相应的水下信息。在机器鱼的水下运动中,鱼鳍与水环境之间的相互作用使鱼鳍发生被动变形,从而产生了驱动机器鱼的推进力[1]。了解鱼鳍获得的感知信息和推进力之间的关系是机器鱼具备驱动控制、灵活调节和环境适应能力的基础。
PHELAN等人的研究表明了测量仿生鱼鳍形变状态既是一种鱼鳍形态方面的感官测量,也是一种与产生推进力有关的映射[2],但并未建立具体的映射模型;KAHN等人对鱼鳍运动学的研究也表明无论是作为一种感官测量,还是作为一种与产生推进力有关的物理现象,在鱼鳍内部分布传感器可以有效预测推进力的变化特征[3],说明了鱼鳍变形测量对于推进力预测的重要性,但其仅在理论上进行了阐释,并未进行具体的实验验证。由于仿生鱼鳍在运动过程中每个部位的形变状态不同,因此仿生鱼鳍的不同位置对于推进力的产生有着不同的贡献程度,FRANK等人的仿真结果表明拍动式鱼类的胸鳍外侧尖端的大幅度柔性变形主导了推进力的产生[4]。而一些研究人员最近开发的用于水下环境感知的水流传感器[5]和涡流传感器[6]在与柔性仿生鱼鳍的集成上也面临着巨大的挑战,不能很好地实现多传感数据的同步采集。
针对上述存在的问题,本文基于鱼鳍的形变特性和推进力之间的关系,制备了基于压电/压阻双传感模式的仿鱼鳍复合传感器并搭建实验平台,采集仿生鱼鳍在运动过程中的推进力信息和复合传感器输出的传感信息。为了揭示传感信息和推进力信息之间的复杂关系,更好地完成推进力预测工作,建立基于BP人工神经网络的推进力预测模型并对建立的模型进行训练。同时,针对分布在仿生鱼鳍上不同位置的不同传感层各自的输出特性以及与推进力的关联程度,提出用皮尔逊相关分析法对输入层数据进行筛选和优化,以提高模型的预测精度,为进一步提升机器鱼的水下感知能力提供了新的途径。
1 仿鱼鳍复合传感器与实验平台
1.1 复合传感器工作原理及输出特性
如图1(a)所示,鱼鳍对于外界刺激的感知是快速检测功能和慢速检测功能的结合,快速检测受体仅在鱼鳍运动开始和结束时发生响应,且对不同弯曲速度和频率刺激对应着不同的输出强度;在鱼鳍保持在弯曲位置时,慢速检测受体在弯曲期间会对其状态持续做出响应,且随着鱼鳍弯曲量的增加,慢速检测受体持续保持活跃且保持期内的强度持续增加[7]。为了模拟鱼鳍这一感知特性,通过在一个柔性传感器上集成柔性压电层和柔性压阻层,采取双模式传感原理将2种基于不同测量原理的传感器的优点结合,设计并制备了仿鱼鳍复合传感器,使其完成对弯曲速度等动态信息和弯曲角度等静态信息的同步感测,其工作原理图如图1(b)所示。
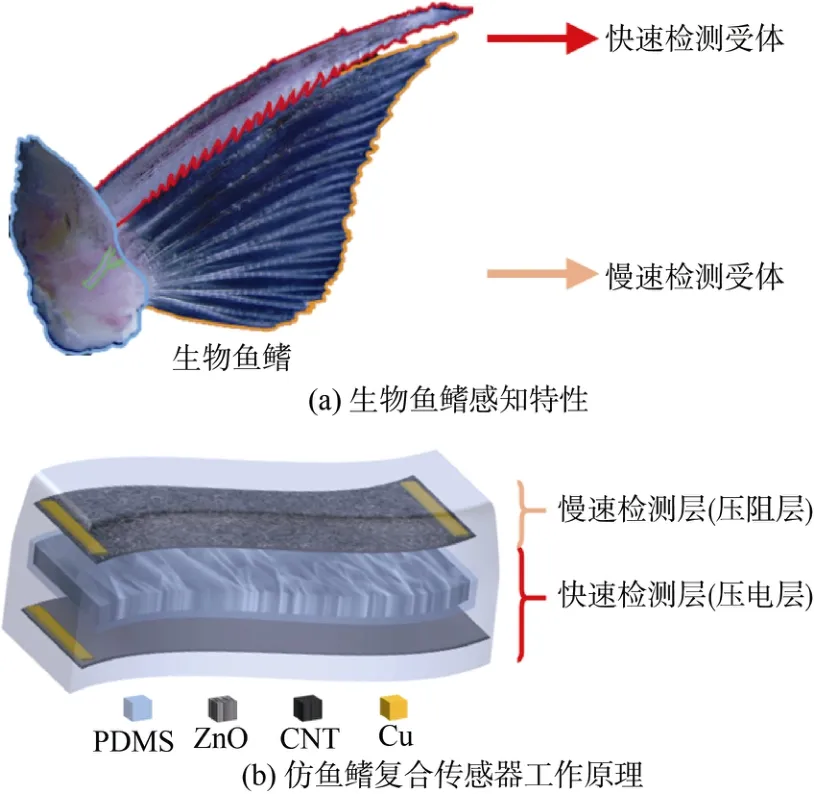
图1 仿鱼鳍复合传感器仿生原理图Fig.1 Bionic principle diagram of fish fin-like composite sensor
由于仿鱼鳍复合柔性传感器中的压电传感层和压阻传感层都具有各自的性能特色,为了验证复合传感器的传感性能和感知范围,通过激振试验测试复合传感器中压电层和压阻层的输出特性。如图2(a)所示,当激振频率设置为10 Hz时,压电层可以检测出高频动态刺激信息的变化。而相对于压电层信号,压阻层输出的信号没有一个明显的增大趋势,并且输出信号也不稳定,代表着压阻层输出的信号不能正确反映出高频动态刺激信息,如图2(b)所示。而压阻层在感知静态刺激信息的性能方面则具备一定的优势。
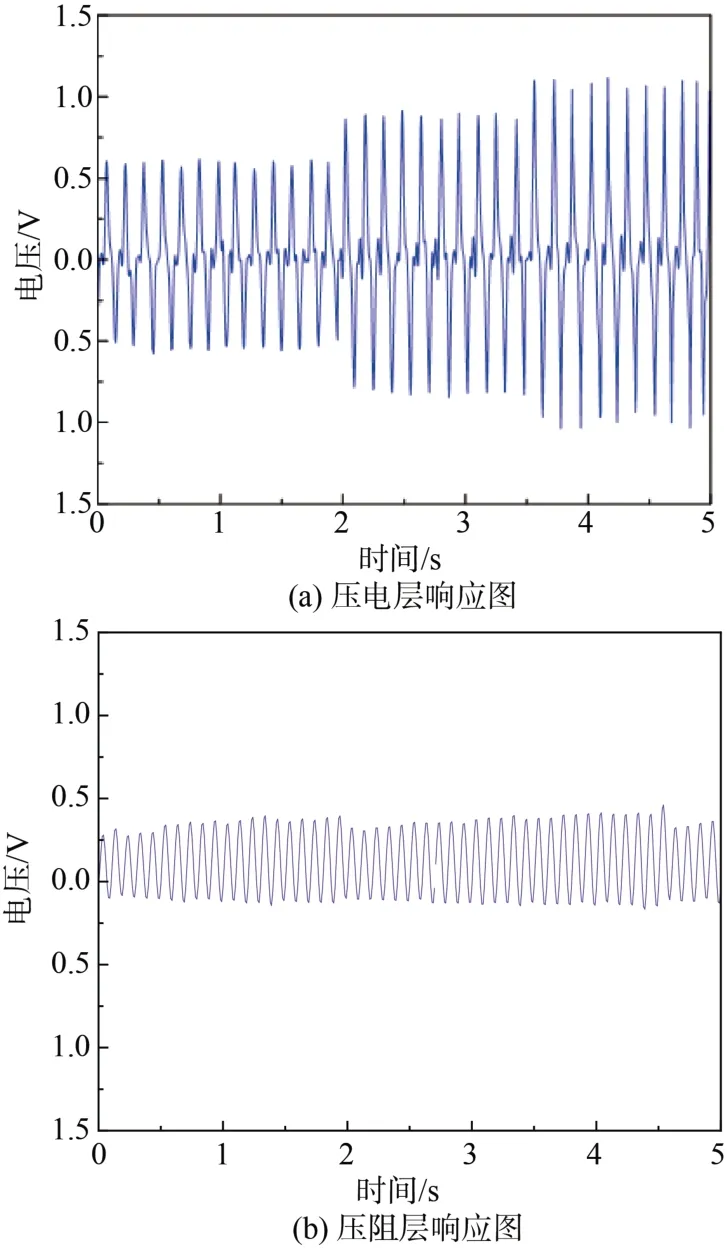
图2 复合传感器的动态刺激检测Fig.2 Dynamic stimulus detection with composite sensors
表1展示了仿鱼鳍复合传感器中各传感层的性能参数,说明仿鱼鳍复合传感器中的压电层和压阻层的传感性能各有侧重,结合2个传感层的优势可对动态刺激信息和静态信息进行检测。
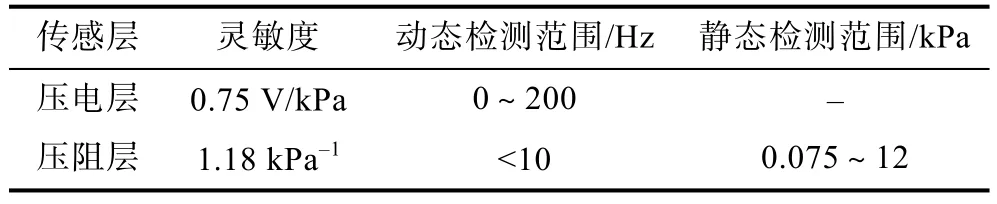
表1 仿鱼鳍复合传感器性能参数Table 1 Performance parameters of fishtail-like composite sensor
1.2 实验平台搭建
为了准确评估仿鱼鳍复合传感器的信号和其与推进力之间的映射关系,需同步采集机器鱼的仿生鱼鳍在拍动过程中产生的推进力信息与安装在仿生鱼鳍中的复合传感器输出的感测信息,进行推进力的估计方法研究。我们在一款拍动式推进的机器鱼模型[8]的仿生鱼鳍上分布式安装仿鱼鳍复合传感器。由于仿生鱼鳍在运动过程中每个部位的形变状态不同,所以安装在仿生鱼鳍上不同位置的复合传感器对于推进力的预测有着不同的贡献程度。在本实验中选择将复合传感器安装在仿生鱼鳍的前缘尖端位置(a),背侧近端位置(b)和腹侧位置(c),安装位置如图3所示。
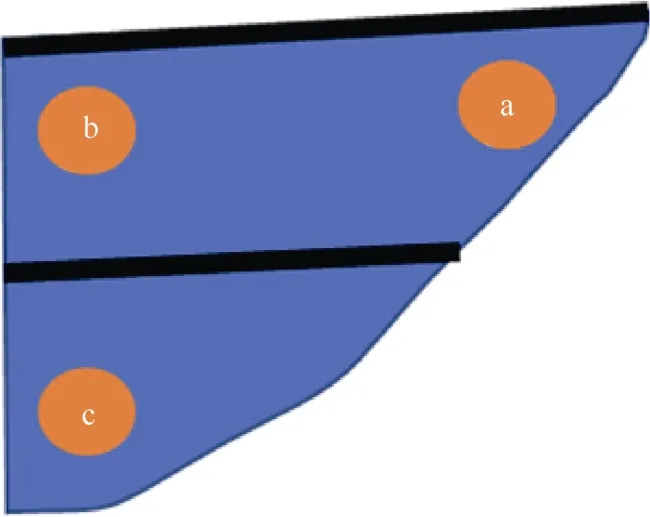
图3 复合传感器布局方案示意图Fig.3 Scheme schematic of composite sensor layout
基于以上分析和测量需求,搭建了仿生鱼鳍变形–推进力实验平台。该实验平台主要由玻璃水缸(1.2 m×1.5 m×1.0 m)、六轴力传感器(ATI-Mini40-IP68,ATI)、数据采集卡(USB-6210,National Instruments)、控制板(RoboMaster C,Dji)、恒压电源、防水舵机、固定夹具、仿生鱼鳍和仿鱼鳍复合传感器几个部分组成。将仿鱼鳍复合传感器通过浇筑成型法嵌入安装到仿生鱼鳍中,用于测量仿生鱼鳍拍动时的变形状态。仿生鱼鳍通过与六轴力传感器连接,用夹具安装在玻璃水缸上方的支架上。在实验中,通过控制板产生PWM信号驱动舵机使仿生鱼鳍在水下执行数千次往复拍动步态,通过六轴力传感器采集仿生胸鳍在往复拍动时产生的推进力信息,并同步采集仿鱼鳍复合传感器输出的信号。
2 基于BP神经网络的推进力预测模型构建
2.1 基于BP神经网络的推进力预测模型的建立
经过对推进力信息的分析,发现其具体的规律一般表现为:对于不同的拍动幅度和不同的拍动频率,都会对应有不同的推进力输出,而每个拍动周期内的仿生鱼鳍形变状态和推进力基本都是按固定的周期规律性变化的。
由于仿生鱼鳍的各个部位的变形状态是与周围流体相互作用的结果,安装在不同位置上的复合传感器的感测信息可能是相互关联的。各种输入信息之间的相关性通常会导致数值条件不良的建模问题[9]。而神经网络目前在处理复杂非线性问题中对于数据分析、数据挖掘和预测等方面都能表现出极强的能力。
人工神经网络模仿了神经系统感知外部信息的机制,通过让众多神经元对外界信息进行学习和相互传递来准确描述不同信息之间的内在联系[10]。BP神经网络是目前应用比较广泛的人工神经网络,通过误差反向传播算法训练后,BP神经网络具有良好的非线性映射能力,且其结构和训练简单,使其能够通过学习和训练进行大量输入输出模型映射关系的储存,在非线性问题中拟合程度高,很好地适应复合传感器中各传感层输出信号的波动性大等特征,在预测领域应用较为广泛。
含有1层隐含层的多层神经网络模型的结构功能已经可以满足很多要求不高的非线性问题和应用场景,所以我们采用如图4所示的单隐含层的BP神经网络作为预测模型的结构框架。其结构组成包含输入层、隐含层和输出层3个部分。其中,模型的输入层导入的数据为X=(x1,x2,...,xn)T,此向量代表着仿生鱼鳍上各复合传感器的压电/压阻层的输出信号;模型的隐含层输入的数据为Y=(y1,y2,...,ym)T,预测模型输出量为推进力P,而目标期望输出量为推进力T。从输入层到中间隐含层的权值为V=(v11,v22,...,vnm)T,从中间隐含层到输出层的权值为W=(w1,w2,...,wm)T。
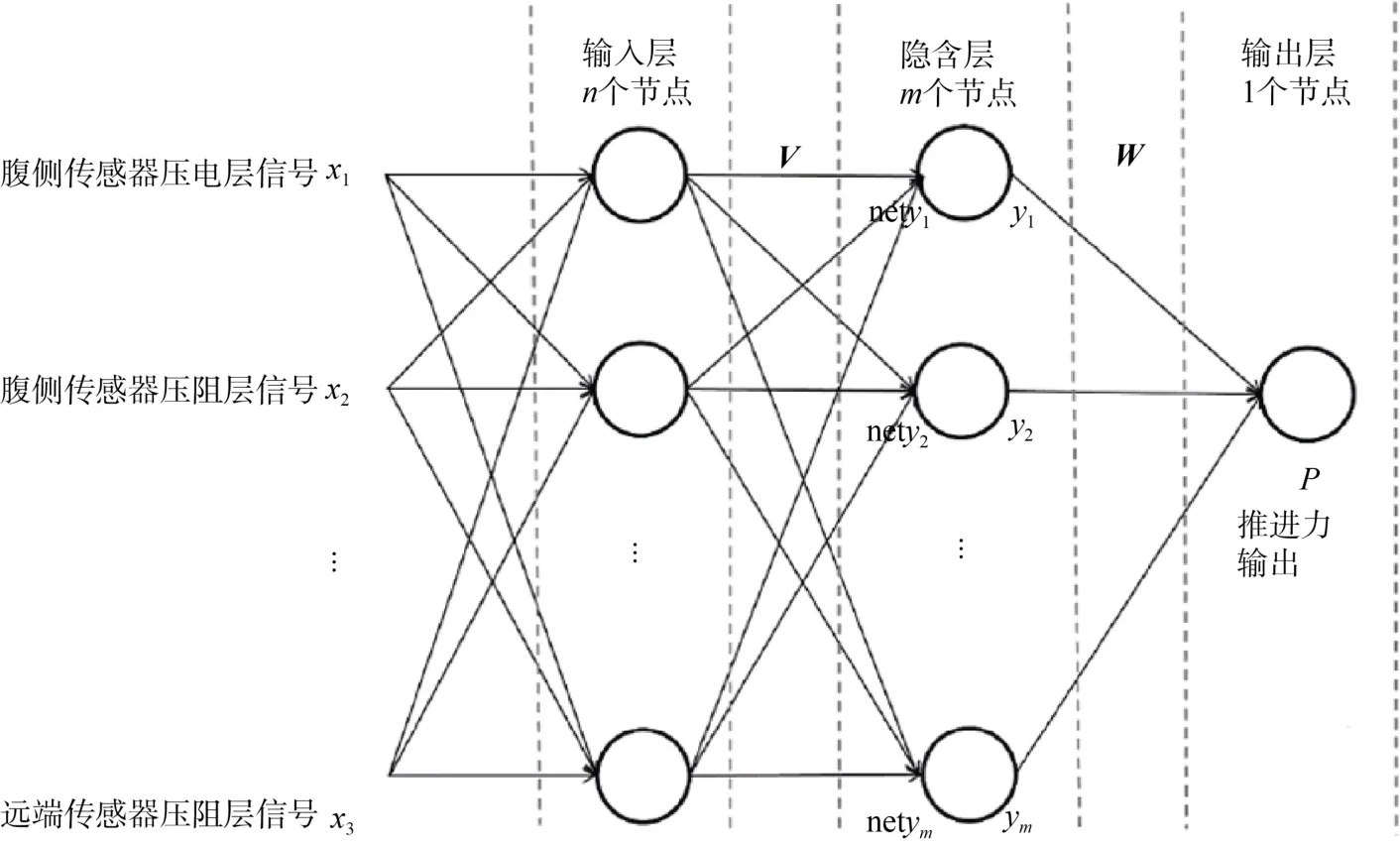
图4 推进力预测模型结构框架Fig.4 Structural framework of propulsion prediction model
BP神经网络推进力预测模型的激励函数采用Sigmoid函数,它的数学表达式为
BP神经网络的学习算法的过程为不断更新模型中层与层的权值,直到预测模型推进力输出量P与目标期望推进力输出量T之间的误差缩至最小。预测模型使用单隐含层BP神经网络,当模型推进力输出量P达不到目标期望推进力输出量T的要求,将两者之间的误差设为E,则有以下定义:
其中,隐含层的数学表达式为
预测模型输出量P的数学表达式为
模型中各层的权值,决定了模型预测的误差,所以可通过直接调整各层的权值来对误差E进行修正。具体的,通过误差函数对各层权值求偏导,可以得到各权值的数学表达式:
通过以上推导可以得知,在此预测模型的学习算法中,各层的权值的影响因素为:当前层数的输入信号、训练值与真实值之间的误差信号以及学习率η。
2.2 基于BP神经网络的推进力预测模型的训练
为了满足BP神经网络模型在推进力预测中的应用要求,还需要对BP神经网络预测模型中的参数不断进行训练优化,以不断提升模型的预测性能和精准性。将各传感器信号作为输入层数据进行归纳和处理后,随机划分为训练集、验证集和测试集几个互斥子集,然后对推进力预测模型中的各层权值与参数进行合理选择。经过训练集和验证集的不断计算来优化预测模型的参数,使优化后的预测模型的性能可以满足对测试集进行推进力预测分析的要求。
推进力预测模型训练与学习的流程:1)构建模型结构及神经网络初始化;2)训练集生成,模型训练;3)预测误差计算及返回;4)调整各层各单元权重值;5)得出最优权重值。
3 基于BP神经网络的推进力预测实验
3.1 推进力预测实验及分析
在推进力预测实验过程中,首先需要经过合理的数据划分完成训练集、测试集和验证集的建立;然后需要对训练数据进行预处理,在确定了模型的结构之后,进行初始化参数工作,进而完成模型预测的准备工作。
由于仿生鱼鳍上搭载了3个复合传感器,一共6个输入节点,故先将预测模型的输入层节点数设置为6。对于隐含层的节点数,采用经验公式法来确定,常用的确定隐含层节点数的公式为
式中:l为表隐含层的节点数;a为输入层的节点数;b为输出层的节点数;c为1~10之间的正整数。
由于隐含层节点数不仅与输入、输出层的节点数有关,还与预测问题的实际情况和激活函数的型式以及样本数据的特性等因素有关[11],所以上述公式还是以估算为主,理论上还没有一种科学和普遍的确定方法。结合王嵘冰等人如何确定人工神经网络隐含层结构的相关研究[12],针对研究问题相对简单的特点,采用的是结合上述经验公式在区间内进行穷举对比的方式来确定隐含层的结构,选定指标是推进力的输出值和标签值的误差,以该误差最小为标准确定隐含层结构。首先,由于输入层节点为6,根据公式计算后可以得出隐含层节点数为12,隐含层的节点范围为3~13。将单隐含层神经网络的神经元节点数设定为12,再依次确定各层隐含层神经元数量。将初步范围中的所有层数分别进行训练以确定层数,然后将每层训练结束后的均方根误差(Root Mean Square Error,RMSE)进行对比,当RMSE最小时,该隐含层节点数作为该网络的最佳隐含层节点数。均方根误差的计算公式为
式中:n为数据样本总量;t为采样时刻;D(t)为在t时刻的样本数据;D′(t)为在t时刻的预测值。
在维持其他变量不变的情况下,设置不同隐含层数量来对前向驱动力和侧向力的预测性能进行对比分析,预测结果如表2所示。可以看出,对于前向驱动力来说,当隐含层数为2时,RMSE最小,预测效果最好,精度最高;隐含层数超过3层后RMSE变大,预测精度开始降低。说明隐含层数设置为2层时,前向驱动力预测最为理想;侧向力也是类似的情况。
基于以上分析,分别对前向驱动力和侧向力的预测模型参数进行设置。其中,激励函数为sigmoid函数;训练函数选择trainlm函数;迭代次数设为1 000;学习率η设为0.01;误差阈值设为10–6。隐含层设置为2层,且每层神经元数目均为12。将6组共15 000个样本数据来对预测模型进行训练,划分70%的数据为训练集,然后选取20%为测试集,最后10%的数据为验证集。输入层为6组传感器采集的数据,输出层分别为推进力和侧向力,由此建立起6-12-12-1的BP神经网络预测模型结构。对2个预测模型分别训练10 000次,得到如下的运算结果,如图5所示。
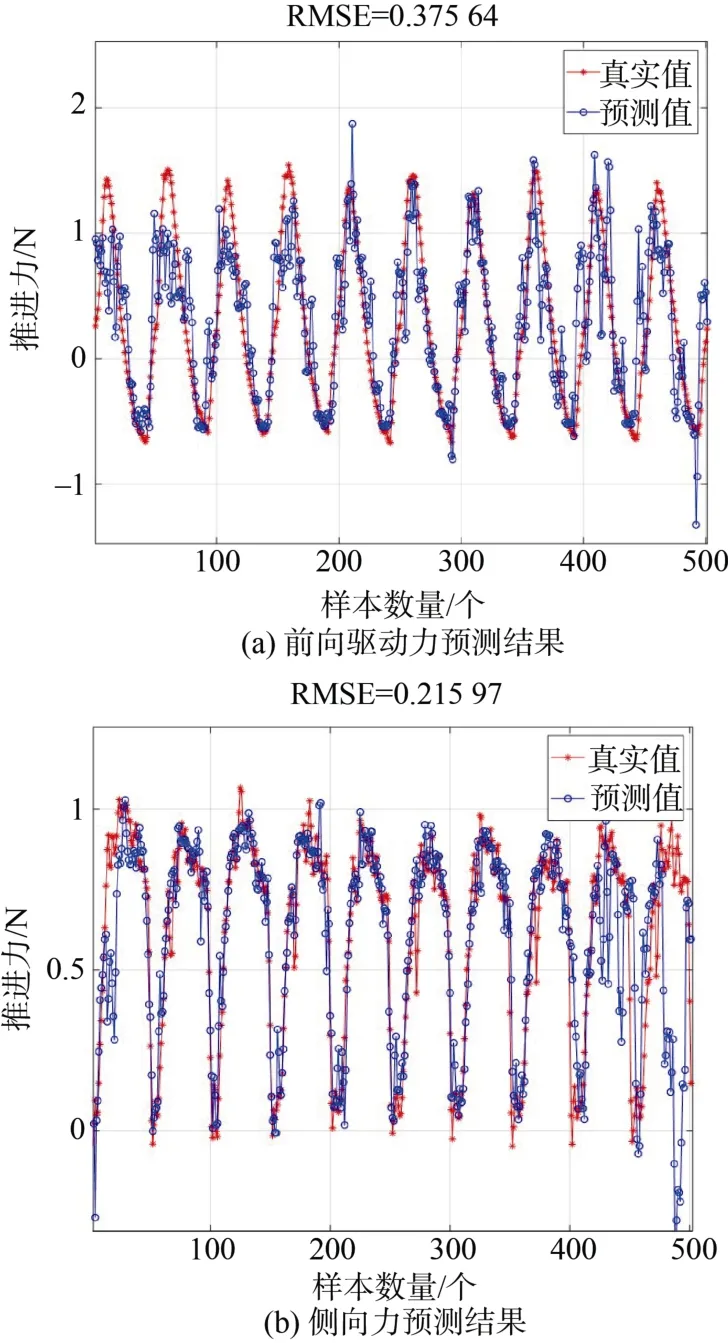
图5 预测结果图Fig.5 Prediction results
从推进力预测结果来看,侧向力的预测效果相比于前向驱动力的预测效果较好。虽然对于前向驱动力和侧向力的预测都达到了一定的效果,但是预测性能还有进一步提升的空间。主要原因是输入层节点的选择,由于输入层的6组传感数据保留了原始变量的大量信息,部分的传感数据对推进力的影响很小,加入这些参数反而干扰了主要因素与推进力之间关系的建立,故所选取的输入层的数据不能够很好地反映要输出的推进力。每组传感数据对于前向驱动力和侧向力预测的影响程度也不同,这是由于相同传感层信号与前向驱动力和侧向力信息的相关程度也有很大差别,所以各传感层对于前向驱动力和侧向力预测的贡献度都有差别。
3.2 推进力预测模型优化分析
虽然完成了推进力的预测工作,但是预测的精度还有待进一步提升。有研究表明,使用弯曲传感器的线性预测模型比使用压力传感器的线性预测模型表现更好,但这些结果尚未在人工神经网络预测模型中得到验证。由于相同传感层对于前向驱动力和侧向力预测的影响程度不同,因此需要分别对前向驱动力和侧向力的预测进行分析,比较安装在不同位置的传感器之间的性能,从而初步确定能使预测模型性能调整至最好的最佳传感器的安装位置和类型。
1) 安装在不同位置的复合传感器的预测性能对比。
①前向驱动力预测性能。
首先,将安装于仿生鱼鳍前缘尖端位置a,背侧近端位置b,腹侧位置c的复合传感器的压电/压阻层信号分别导入到前向驱动力预测模型(输入层节点为2)中进行前向驱动力预测实验,其他参数保持不变,对比布置在3个测量点的复合传感器的前向驱动力预测性能,预测结果如图6所示。
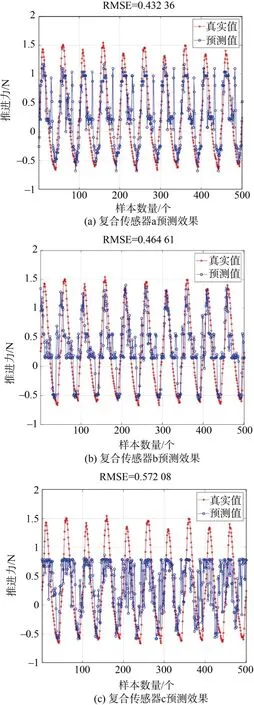
图6 各位置复合传感器的前向驱动力预测性能对比图Fig.6 Comparison of the forward drive prediction performance of composite sensor by position
可以发现来自仿生鱼鳍尖端位置a处的变形状态数据构成的前向驱动力预测模型表现最好,这与前人对于鱼体水动力学的研究结果[3]一致,鱼鳍尖端的变形主导了前向驱动力的产生。所以,如果要对前向驱动力进行测量或预测,变形状态的最佳取样点通常位于鱼鳍尖端部分。
②侧向力预测性能。
按同样的位置安装复合传感器进行预测实验,对比布置在3个测量点的复合传感器的侧向力预测性能,预测结果如图7所示。
对预测效果进行对比分析可以发现来自仿生鱼鳍c处的变形状态数据构成的侧向力预测模型效果最好,代表鱼鳍腹侧的变形主导了侧向力的产生。所以,如果要对侧向力进行测量或预测,变形状态的最佳取样点通常位于鱼鳍腹侧部分。
2) 最佳传感器组合分析。
虽然使用更多的输入层数据可以使预测过程中提供更多信息,但这些信息并非所有都可以与所研究的任务或过程产生正向促进作用。因此,为了舍弃对推进力预测不重要甚至会影响预测精准性的输入层数据,提出用皮尔逊相关系数(Pearson Correlation Coefficient)分别度量各传感层数据与推进力信号之间的相关性,从而对输入层数据进行筛选和优化。皮尔逊相关系数r值可以衡量2个连续信号如何随时间共同变化,代表两者之间的关联程度,其计算公式为
式中:{xi,i=1,2,...,n}和{yi,i=1,2,...,n}分别为2个信号;和分别为2个信号的平均值;rxy为2个信号的皮尔逊相关系数。若rxy>0,表明2个变量是正相关;若rxy<0,表明2个变量是负相关。rxy的绝对值越大表明相关性越强。皮尔逊相关系数和其代表的2个信号间的相关程度如表3所示。
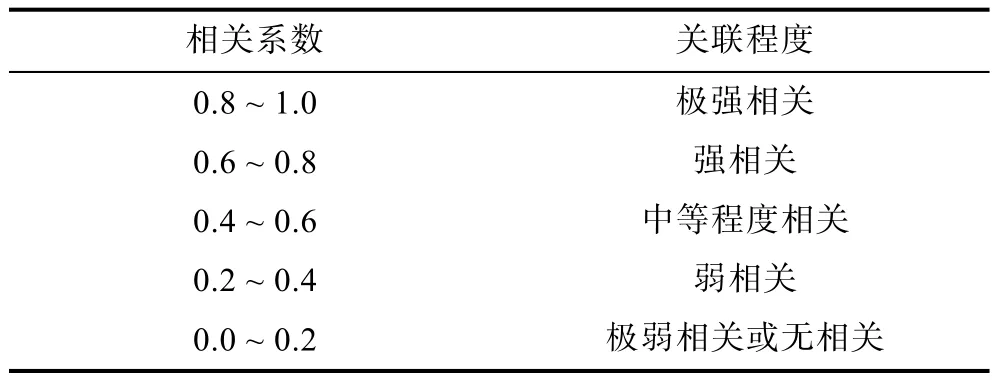
表3 皮尔逊相关系数和对应关联程度Table 3 Pearson correlation coefficient and corresponding correlation degree
用皮尔逊相关性分别分析6组传感数据与推进力中的推进力和侧向力之间的相关系数,计算得到的各输入层节点与推进力信息之间的相关系数和对应的相关程度如表4所示。
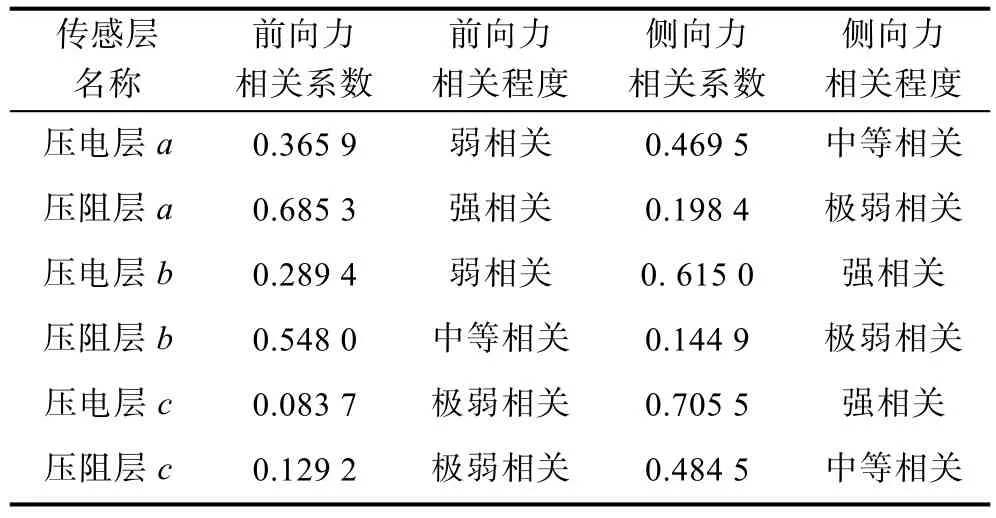
表4 各传感层的相关系数和关联程度Table 4 Correlation coefficient and correlation degree of each sensing layer
分别对比6个不同安装位置的仿鱼鳍复合传感器中各传感层与前向驱动力、侧向力的相关性,得出以下结论:
①对于前向驱动力的相关因素,布置在仿生鱼鳍尖端的复合传感器a中的压阻层的信号与推进力信息的相关系数最高,说明位于鱼鳍尖端的变形情况最能与推进力的变化产生映射规律。
②对于侧向力的相关因素,可以发现安装在a、b、c这3个位置的压电传感信息均与侧向力信息的相关程度较高,说明在鱼鳍上分布压电传感器比分布压阻传感层更能对侧向力进行准确预测。对于最佳取样位置,可以发现靠近腹侧位置的传感器更能正确反映出侧向力的变化。
根据上述皮尔逊相关性分析,剔除与前向驱动力和侧向力信息呈现“极弱相关或无相关”的关联程度的传感层数据。分别对BP神经网络预测模型进行训练,得到如图8的预测结果。
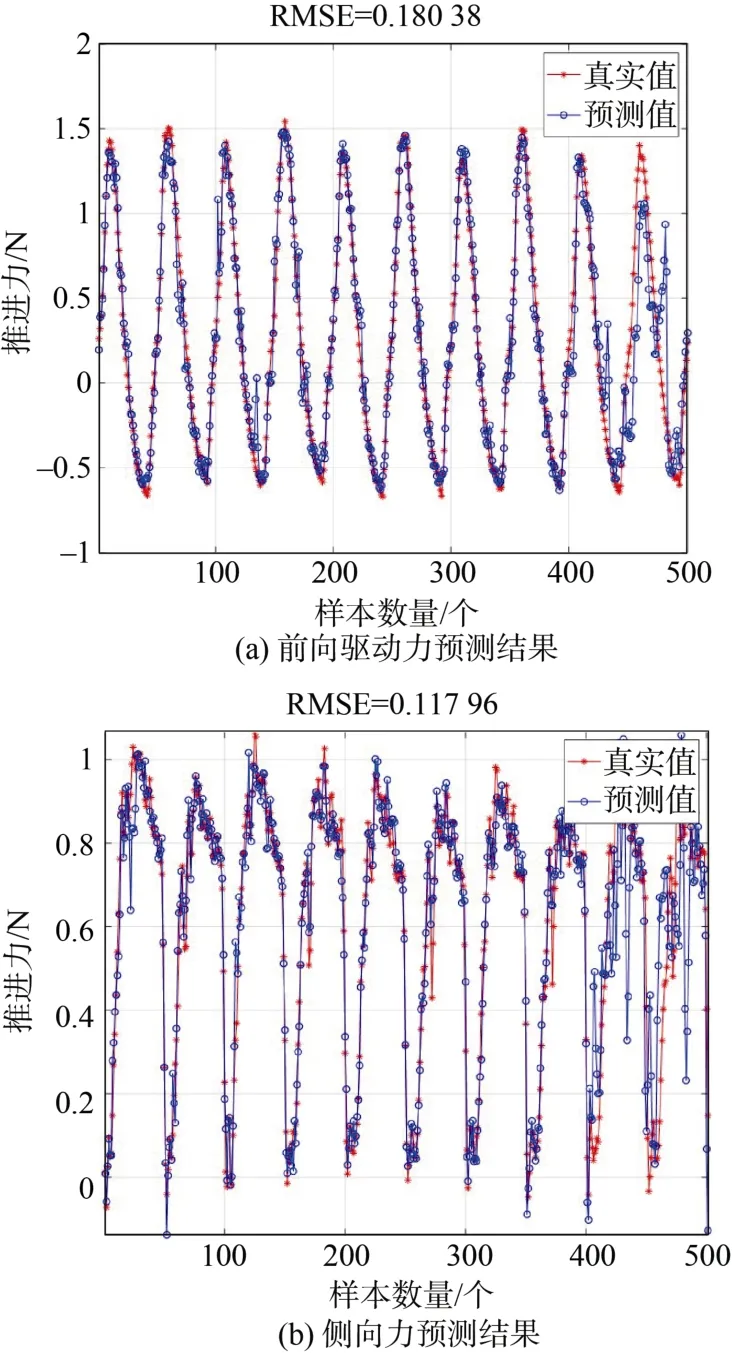
图8 预测结果图Fig.8 Prediction results
从预测结果来看,由于保留了与推进力信息相关程度较高的关联变量传感层数据作为输入层节点,并剔除了与推进力信息相关程度不高甚至于完全不相关的传感层数据,降低数据集维度的同时提高了推进力预测的准确性和高效性。结果显示对于前向驱动力和侧向力的预测性能相较于之前都得到了提升,预测效果较为理想,证明基于BP神经网络及皮尔逊相关性分析的多传感层组合的推进力预测是有效可行的。
4 结束语
本文针对现有对机器鱼推进力进行识别和预测研究的局限性,提出了一种通过仿鱼鳍复合传感器对鱼鳍产生的推进力预测的方法。通过在一个柔性传感器上集成柔性压电层和柔性压阻层制备了仿鱼鳍复合传感器,使其完成对仿生鱼鳍变形状态的感测,并建立了基于BP人工神经网络的推进力预测模型,对仿生鱼鳍在拍动过程中受到的推进力进行识别和预测。针对安装在仿生鱼鳍上不同位置和不同传感层类型的预测效果,提出用皮尔逊相关性分析法对输入层数据进行筛选和优化,提高模型的预测精度。实验结果表明:基于BP神经网络及皮尔逊相关性分析的多传感层组合的推进力预测模型能够有效预测鱼鳍产生的推进力的变化特征,并具有一定的预测精度。研究结果进一步提升了机器鱼的水下感知能力,为机器鱼的驱动控制和环境适应提供了新的方法,拥有广泛的应用范围。
猜你喜欢
学苑创造·C版(2022年2期)2022-01-29 19:36:44
机械设计与制造(2021年8期)2021-08-26 10:55:56
中国外汇(2019年9期)2019-07-13 05:46:30
天津师范大学学报(自然科学版)(2019年2期)2019-04-29 08:04:22
意林·少年版(2019年2期)2019-01-16 20:01:16
家庭影院技术(2018年9期)2018-11-02 05:31:30
现代企业文化(2018年13期)2018-06-09 08:22:15
家庭影院技术(2018年3期)2018-05-09 07:06:17
东方法学(2017年4期)2017-07-13 16:45:07
卫星电视与宽带多媒体(2017年13期)2017-03-09 13:08:25