水陆两栖机器人水下动力学建模及操纵性研究
2023-09-02 11:26童保成祖斯羽
数字海洋与水下攻防 2023年4期
陈 龙,童保成,祖斯羽,张 豪,胡 桥,2,*
(1.西安交通大学 机械工程学院,陕西 西安 710049;2.西安交通大学 陕西省智能机器人重点实验室,陕西 西安 710049)
0 引言
海洋一直以来都是国家高质量发展的战略要地,建设海洋强国是实现中华民族伟大复兴的重大战略任务。研究一种既能实现海洋与陆地环境探测,又具有高效推进能力、环境适应性强的两栖机器人,对海洋资源探测和近海区域警戒具有重要的现实意义[1-2]。针对现有水陆两栖机器人环境适应性差和稳定性弱等问题,本文将仿生推进机构与传统推进机构结合设计出一种高性能组合推进型水陆两栖机器人。机器人的水下操纵性影响其工作状态,因此研究机器人的水动力系数以及水下操纵性有重要意义。
通过CFD方法建立机器人水下动力学模型的方法已通过标模试验数据的验证,得到了国内外学者的广泛应用。2021年,FRANCESCHI等人利用开源CFD代码OpenFoam求解了船体本地和附加质量的水动力系数,完成了对双轴舰船的操纵性质量评估[3],研究表明,应用CFD流体分析方法可以得到较为准确的结果。2019年,GO等人提出了一种利用计算流体动力学技术求解拖鱼水下航行器水动力导数的新方法[4],并进行了不同速度下拖鱼在3种运动场景的六自由度仿真,最后通过虚拟仿真结果与理论对比分析,验证了方法的有效性[3]。2017年,意大利DUBBIOSO等人利用非定常CFD求解器详细分析了潜艇的机动特性,针对十字形和X形舵进行水平面的三自由度运动分析,并通过实验进行验证,研究结果表明X形舵具备更加优异的转弯能力[5]。上海交通大学万教授团队基于OpenFOAM仿真平台,开发了一款船舶自航行求解器naoe-FOAM-SJTU[6],实现了船舶航行的直接数值模拟。结合上述研究现况分析可知,基于CFD的间接求解方法计算效率和精度高,且易于参数化,便于进行动力学模型的修正和机器人优化设计。
本文以一种利用波动鳍推进的轮–鳍–桨机器人为研究对象,通过CFD技术针对机器人水下多种运动模态进行数值求解,分析得到机器人不同运动模态下的水动力特性,求解水动力参数,建立机器人的动力学模型。构建水下运动仿真平台,通过机器人直航、回转等运动模态研究其水下操纵性,并验证动力学模型的准确性和有效性[6],为进一步研究多模态水陆两栖机器人操纵特性奠定了理论与技术基础。
1 机器人坐标系建立及数值求解方法
1.1 坐标系建立
如下图1所示,本文采用了国际水池会议(ITTC)推荐的体系,建立水陆两栖机器人的坐标系:
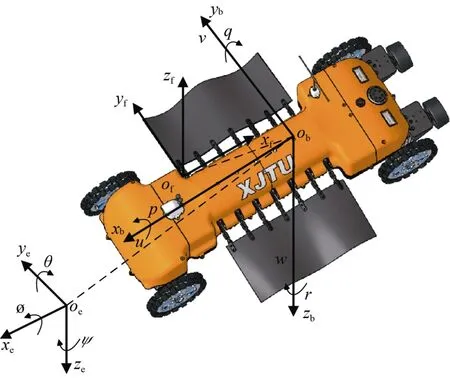
图1 水陆两栖机器人坐标系示意Fig.1 Schematic diagram of the coordinate system for amphibious robots
大地坐标系Oexeyeze–固定坐标系。该坐标系Oe为空间中任一点,且Oeze正向指向地心,Oexe和Oeye位于水平面内且互相垂直。
随体坐标系Obxbybzb–运动坐标系。原点与机器人浮心重合,Obxb轴沿机器人前进方向为正,Obyb轴沿机器人右侧方向为正,Obzb轴垂直于Obxbyb平面指向下为正。
鳍面坐标系Ofxfyfzf–鳍面坐标系。各坐标轴正向与波动鳍动力学建模分析中坐标系相同。
1.2 计算模型
本文以机器人三维模型为基础构建仿真计算模型,计算模型将其内部填充为实体,保留整体的外形轮廓;同时针对局部细节进行简化处理,提高计算速率。最终构建的机器人水下仿真模型如下图2所示,其尺寸为1 150 mm×607 mm×280 mm(长×宽×高)。
1.3 网格划分
根据机器人尺寸划分外流场和密度盒内外2部分计算域。其中:外流场尺寸为8L×6L×6L,密度盒尺寸为1.3L×0.8L×0.5L,L为机器人体长。计算模型放置于密度盒中,距离流体域速度入口的距离为3L,尾部距离压力出口4L,如图3所示。
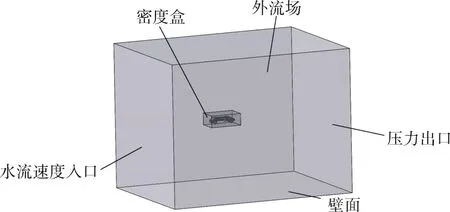
图3 流场范围及边界条件Fig.3 Flow field range and boundary conditions
本文采用ICEM软件进行网格划分。外流场计算域尺寸较大,且无计算模型,故采用结构六面体网格进行划分;由于计算模型在部分工况中非静止,故密度盒内网格划分采用适应性强的四面体非结构网格,该网格支持smooth和remesh共2种动网格节点更新方法,在机器人计算模型表面进行加密,保证计算精度;2个计算域间采用interface边界条件连接,并在接触面处进行加密,如图4所示。
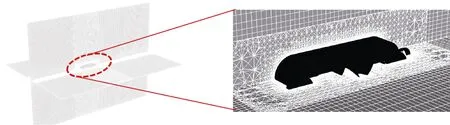
图4 计算域网格划分Fig.4 Computational domain grid partitioning
1.4 仿真参数设定
机器人运动的外流场通常呈现大雷诺数湍流,因此采用可准确描述流场演化规律的N-S方程进行求解,笛卡尔坐标系下RANS方程如下:
经无关性验证,确定密度盒内流场网格数量为2640 000和时间步长为1/40 T时满足精度要求,同时计算效率较高。
机器人仿真计算参数设定如表1所示。
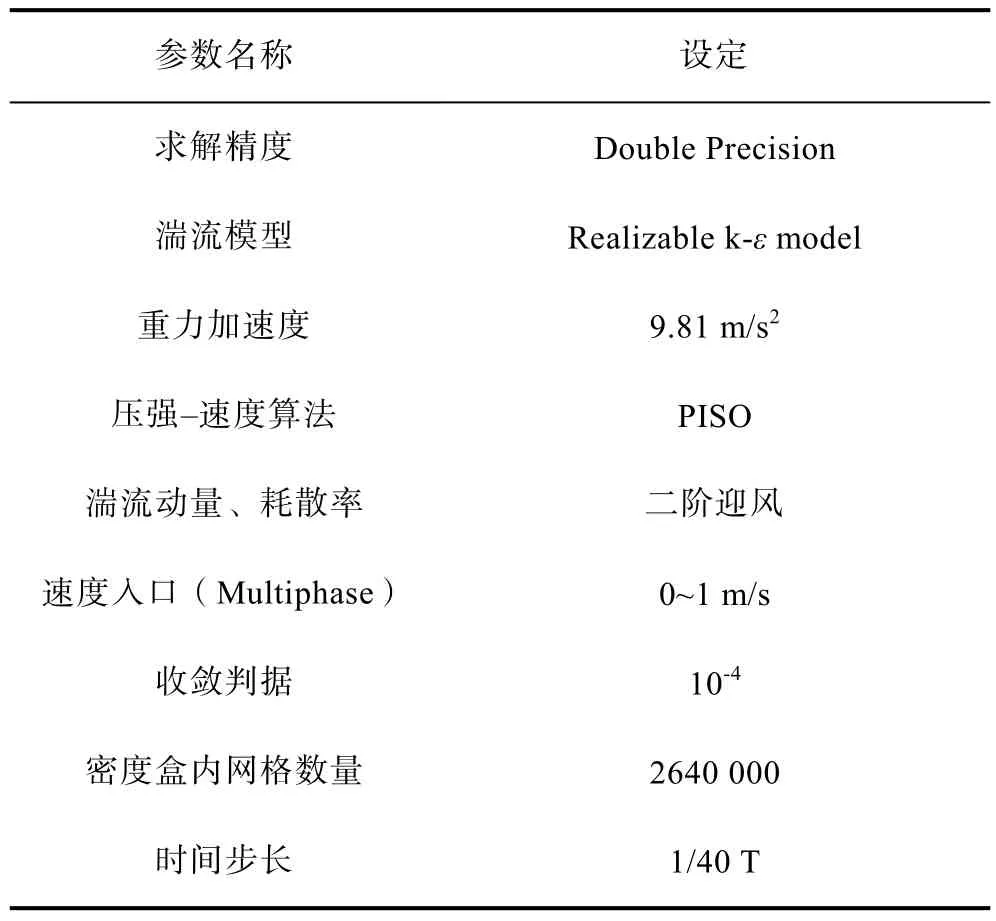
表1 机器人运动仿真参数Table 1 Robot motion simulation parameters
2 水动力系数求解与动力学建模
根据受力分析可知,若要建立机器人水下动力学模型,首先需要求解机器人在水下运动过程中受到的水动力[6]。求解机器人水动力系数成为建立动力学模型的关键。出于研究周期和成本考虑,常采用CFD技术求解机器人不同运动状态下的水动力系数。
2.1 纯纵荡运动
进行纯纵荡运动仿真可求解机器人沿x轴方向速度u的惯性水动力系数Xu′˙,其运动方程如式(2)所示,根据运动方程编写流体仿真UDF文件,实现计算模型在流场内的运动。
式中:U为流场流速,m/s;A为机器人正弦运动的幅值,设置A=40 mm;f为机器人纯纵荡运动频率,取f=0.3 Hz、f=0.4 Hz、f=0.5 Hz共3组工况进行求解。
纯纵荡运动中机器人所受力的表达式为
计算收敛之后,机器人纯纵荡运动中受到的x轴方向的阻力X如图5所示,由于数值仿真前期数据波动较大,可靠性低,因此本文选择10~20 s仿真时间内的数据进行拟合,此时计算已稳定。
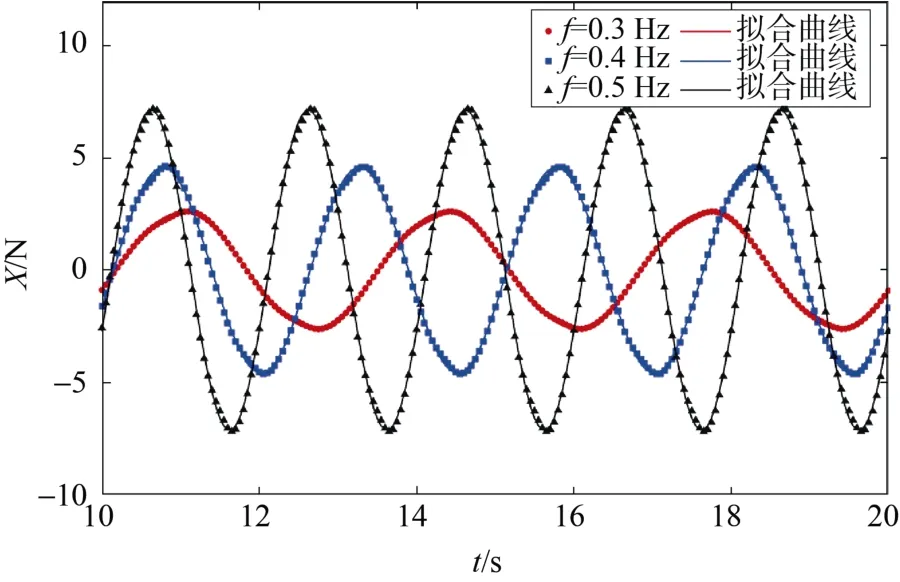
图5 纯纵荡运动中x轴受力曲线图Fig.5 X-axis force curves in pure surge motion
通过曲线拟合,得到公式系数如表2所示。
由于机器人在水下运动过程中很少进行反向运动,若采用纯纵荡运动求解粘性水动力系数会造成较大误差,因此该工况仅用于求解惯性水动力系数,而粘性水动力系数由稳态直航运动进行求解。公式系数与水动力系数的关系式为
通过建立公式系数Xa和-1/2ρL3Aω2之间的线性关系求解纵荡运动的水动力系数,曲线的斜率即为水动力系数,而从小幅度振荡的线性理论可知,由多工况绘制的曲线应该具备过原点特征[9],因此建立的过原点曲线如图6所示。
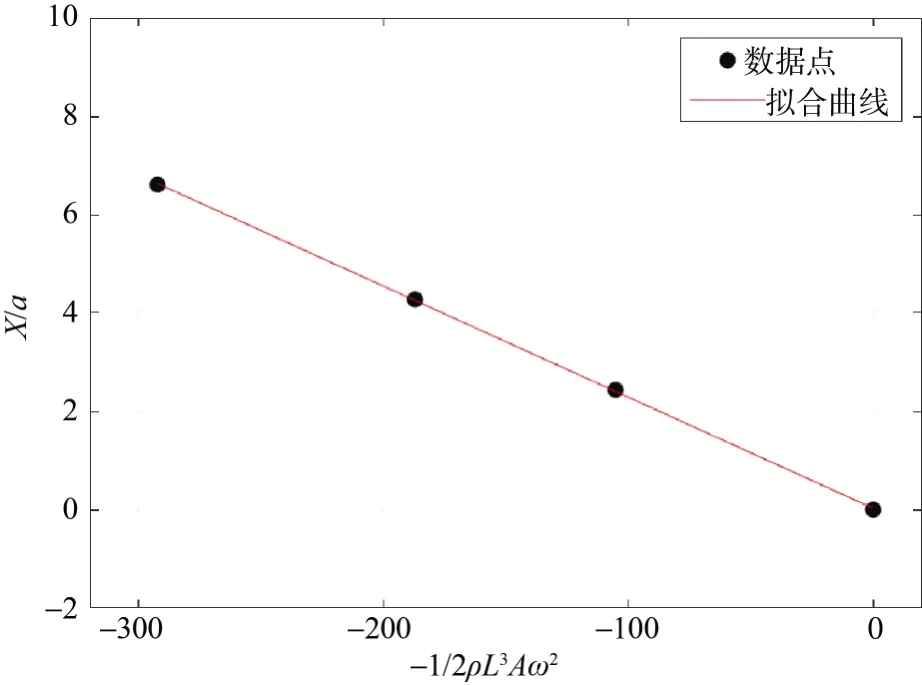
图6 过原点拟合X轴加速度系数曲线Fig.6 A curve of fitting X-axis acceleration coefficient through the origin
由图6可以看出,公式系数Xa和-1/2ρL3Aω2之间整体呈线性关系,且数据拟合效果较好,证明了动态运动仿真求解机器人水动力系数的有效性,求得机器人纯纵荡运动无因次化水动力系数:
2.2 水动力系数求解汇总
以纯纵荡运动求解过程为例,可以求解与无因次化处理其它水动力系数。具体可参考文献[10]。机器人水动力系数计算结果汇总如表3所示。
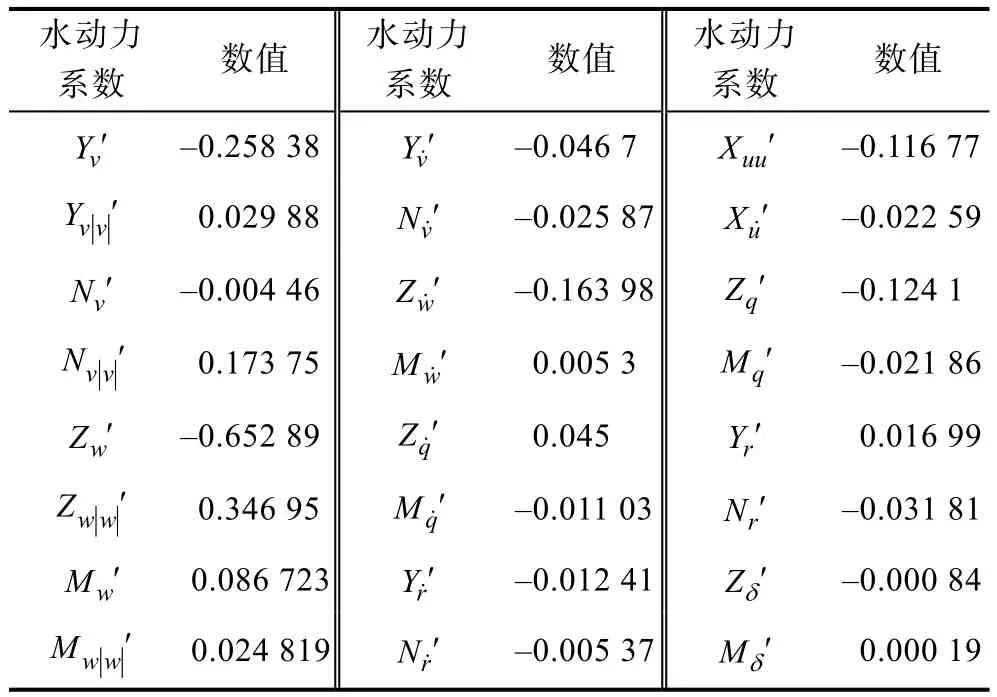
表3 水动力系数计算结果汇总Table 3 Summary of hydrodynamic coefficient calculation results
2.3 五自由度动力学及运动学建模
结合机器人受力分析及水动力系数求解结果,可建立其动力学模型,忽略机器人横摇小扰动的影响[7],将机器人运动方程简化为五自由度动力学方程:
同理,可将机器人运动学方程进一步简化,得到其平动方程:
转动方程为
基于数值仿真结果建立了机器人五自由度运动学和动力学模型,为机器人水下操纵性分析研究奠定了基础。
3 机器人水下操纵性运动特性研究
机器人水下操纵性运动特性分析是基于机器人运动仿真方程,通过设定初始运动参数及机器人推力,以数值积分的方式求解机器人下一时刻的运动状态,可以直观地看到水动力对机器人运动的影响。可以预报机器人运动,验证运动模型的准确性;同时可以总结机器人运动规律,为机器人的优化和研制提供指导。
3.1 运动仿真数值计算方法
为了保证仿真结果的准确性,机器人的仿真方程计算过程中,本文采用精度高、易收敛的四阶经典龙格库塔法进行积分。计算方法如下:
其中:
3.2 机器人运动仿真结果及分析
基于操纵性仿真运动模型,本文针对机器人直航运动及水平面回转运动开展仿真研究,分析机器人运动状态,并对水动力系数和动力学模型的准确性进行验证。
3.2.1 机器人直航运动仿真
初始状态下,机器人的初始运动速度和姿态角均为0,首先设置推进器推力为10 N,接着每隔30 N进行一次运动仿真,求解不同推力下机器人航速和最大推力下的极限速度,结果如图7所示。
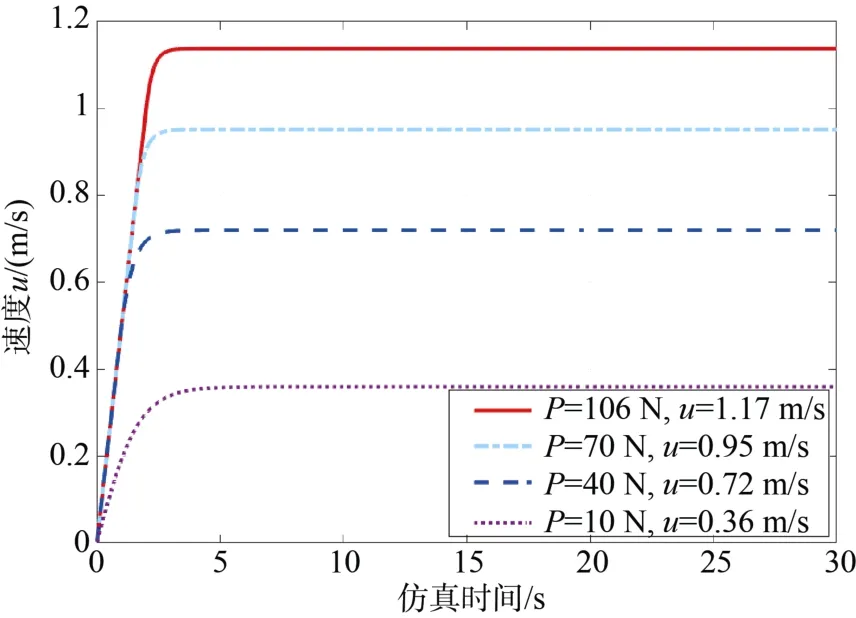
图7 不同推力下机器人航速曲线Fig.7 Robot speed curves under different thrusts
由图7中机器人运动航速曲线可知:
1)当推进器推力P=10N时,机器人航速u=0.36m/s;当P=40N时,u=0.72m/s;P=70N ,u=0.95m/s;而推进器最大合力106 N左右,机器人最大航速约为1.17 m/s。
2)机器人在螺旋桨推进力的作用下,由静止开始加速,且加速时间随着推进力的增大而缩短,最终速度趋于稳定。
3)当水动力与推力平衡时,机器人进入匀速行驶阶段。随着推力增大,机器人航速越大,阻力逐渐增大,而航速增长速率逐渐减小,符合机器人水下直航的一般规律。
3.2.2 机器人水平面回转运动
设置机器人左右推进器推力P=10N,摇艏力矩N=-3N∙m ,机器人由静止开始运动,仿真时间设置为70 s。其运动轨迹、运动过程中机器人在随体坐标系中的纵向速度u、横向速度v、垂向速度w的变化曲线如图8所示。
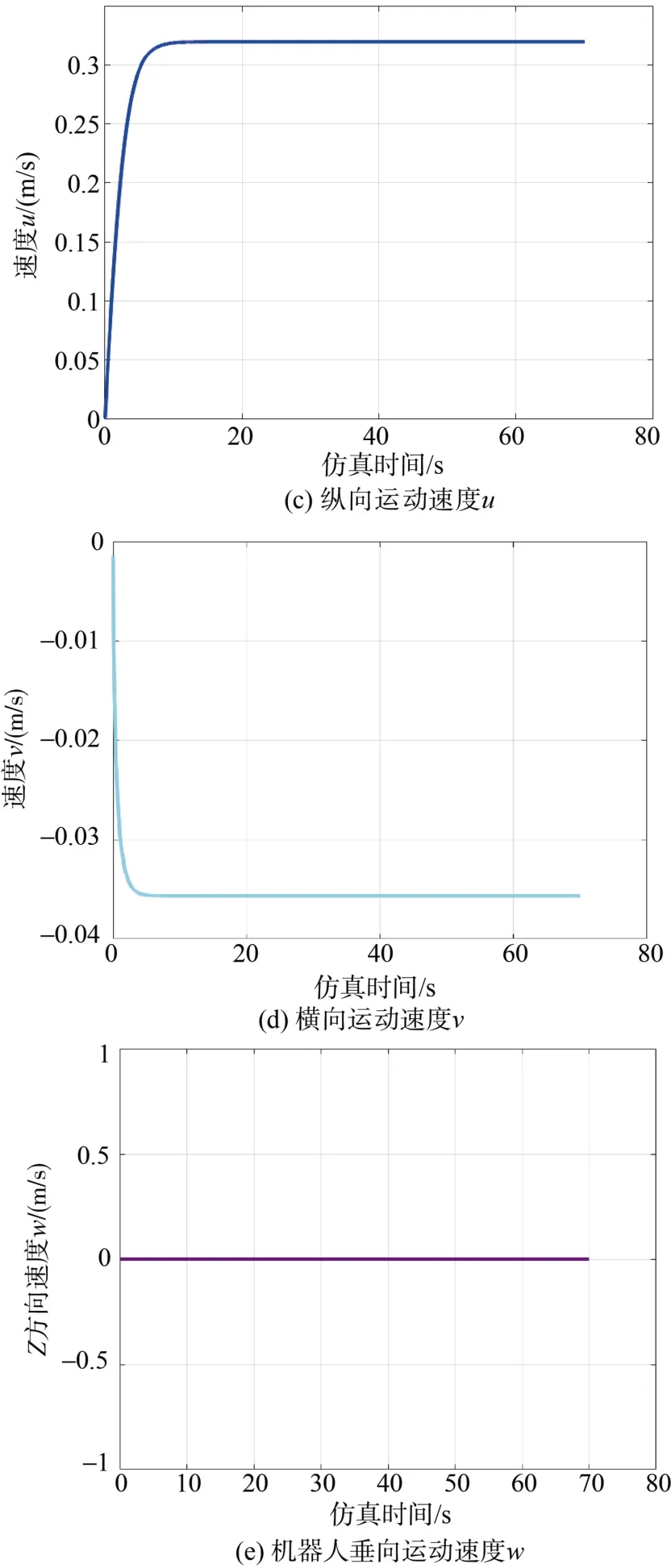
图8 机器人水平面回转运动Fig.8 Robot horizontal rotation motion
由图8可知:
1)机器人在推力P和摇艏力矩N的作用下,由静止开始加速,在10 s之后开始进入匀速回转阶段。
2)当机器人开始匀速回转时,此时纵向速度u=0.32m/s ,横向速度v=0.035m/s,回转半径R约为3.095 m。
3)机器人在推进器推力和摇艏力矩的作用下可实现水下回转运动,符合水下机器人水平回转的一般规律。
结果表明,机器人水下运动基本符合一般水下机器人的运动规律,验证了水动力系数求解的准确性和五自由度运动方程的有效性,该方程可通过一系列仿真预报机器人运动状态,总结运动规律,为机器人闭环运动控制研究奠定了基础。
4 机器人水下操纵性运动实验
为了进一步研究机器人水下运动操纵性,本文开展水下操纵性实验,与数值仿真结果对比分析,从而验证机器人水动力系数和动力学模型的准确性。
4.1 直航运动实验
为了验证机器人直航运动仿真结果的准确性,本实验通过改变推进器推力进行机器人不同航速测试。机器人在推进器作用下从静止开始加速,加速完成后通过10 m标准航段,监测所需时长,从而计算出机器人运动速度,实验结果如下图9所示。
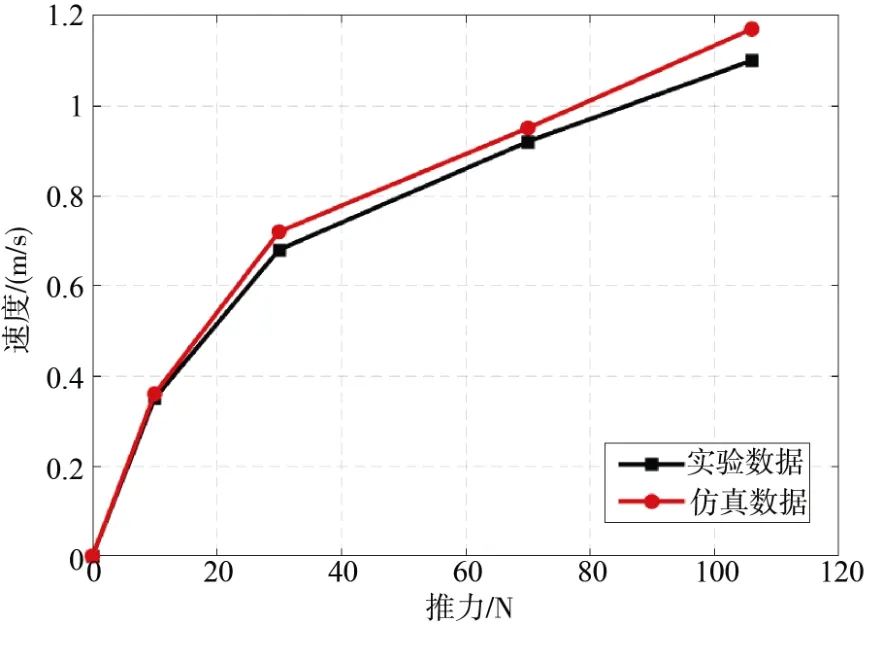
图9 不同推力下机器人水下航行速度Fig.9 Underwater navigation speed of robots under different thrusts
将实验结果与仿真数据对比分析,其结果如下表4所示。
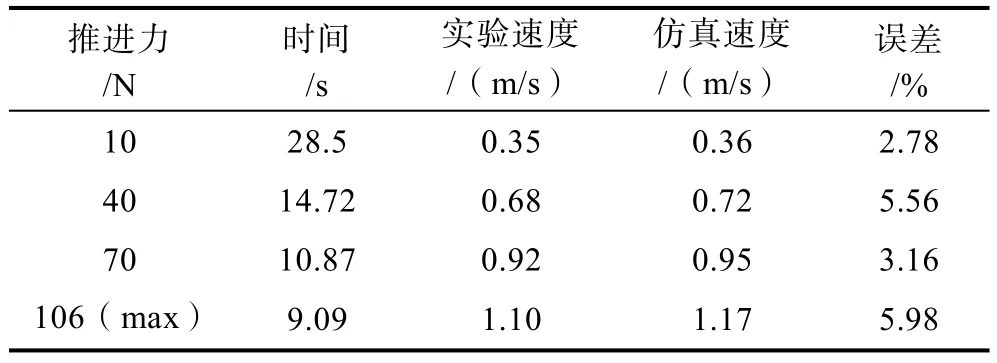
表4 不同推力下机器人航行速度Table 4 Robot navigation speed under different thrusts
由实验结果可知,机器人水下航行速度随着推力增大而不断增大,而阻力也显著提高,因此机器人速度增长速率逐渐减小,符合水下机器人的一般运动规律;且速度误差小于6%,可见实验结果与仿真数据吻合较好,初步验证了机器人水动力系数和动力学模型的准确性,说明了利用动力学模型研究机器人水下运动特性的可行性。
4.2 水平面回转运动
为了进一步验证水动力系数求解和动力学模型的准确性,进行机器人水平面回转运动实验。实验通过UWB(Ultra Wide Band,超宽带)高精度导航定位系统采集机器人的位置信息,如图10所示。UWB定位系统由基站、标签和控制台3部分组成,基站的4个Link Track P-B模块分别位于矩形实验区域四角;标签同样采用Link Track P-B模块,安装在机器人上,标签可测量到基站的距离并解算出坐标信息;控制台可与标签、基站通信,在上位机软件中实时显示机器人位置信息。UWB定位系统的2维定位精度为10 cm;当定位频率为200 Hz时,延迟为5 ms;最远通信距离为1 500 m。
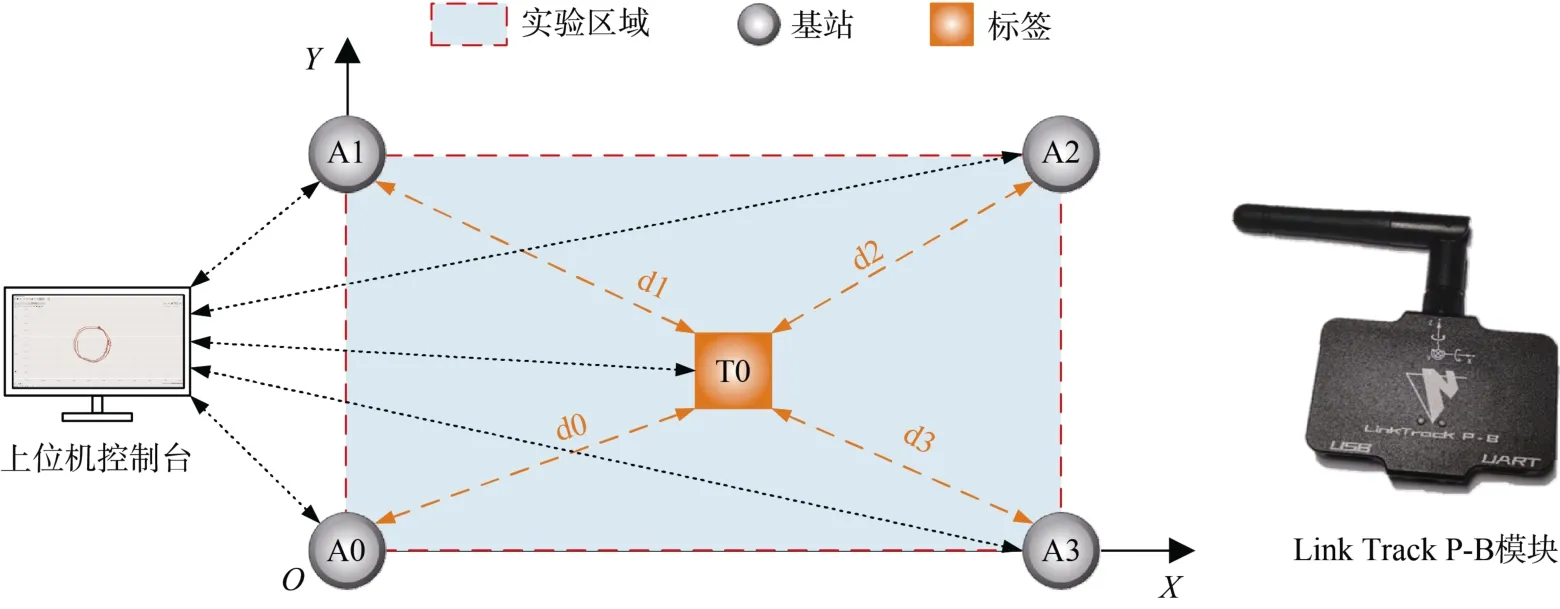
图10 UWB定位系统原理示意图Fig.10 Schematic diagram of UWB positioning system principle
实验过程中,初始条件设置机器人推进力合力为10 N,接着基于初始条件分别设置两侧的推进器推力,在满足推力要求的同时使机器人摇艏力矩为3 N·m。实验过程如图11所示,机器人从静止加速进行水平面回转运动。
实验数据由于噪声干扰出现小范围波动,因此将实验数据通过局部二次回归进行平滑处理,机器人水平面回转运动的仿真数据、实验数据及拟合数据如图12所示。
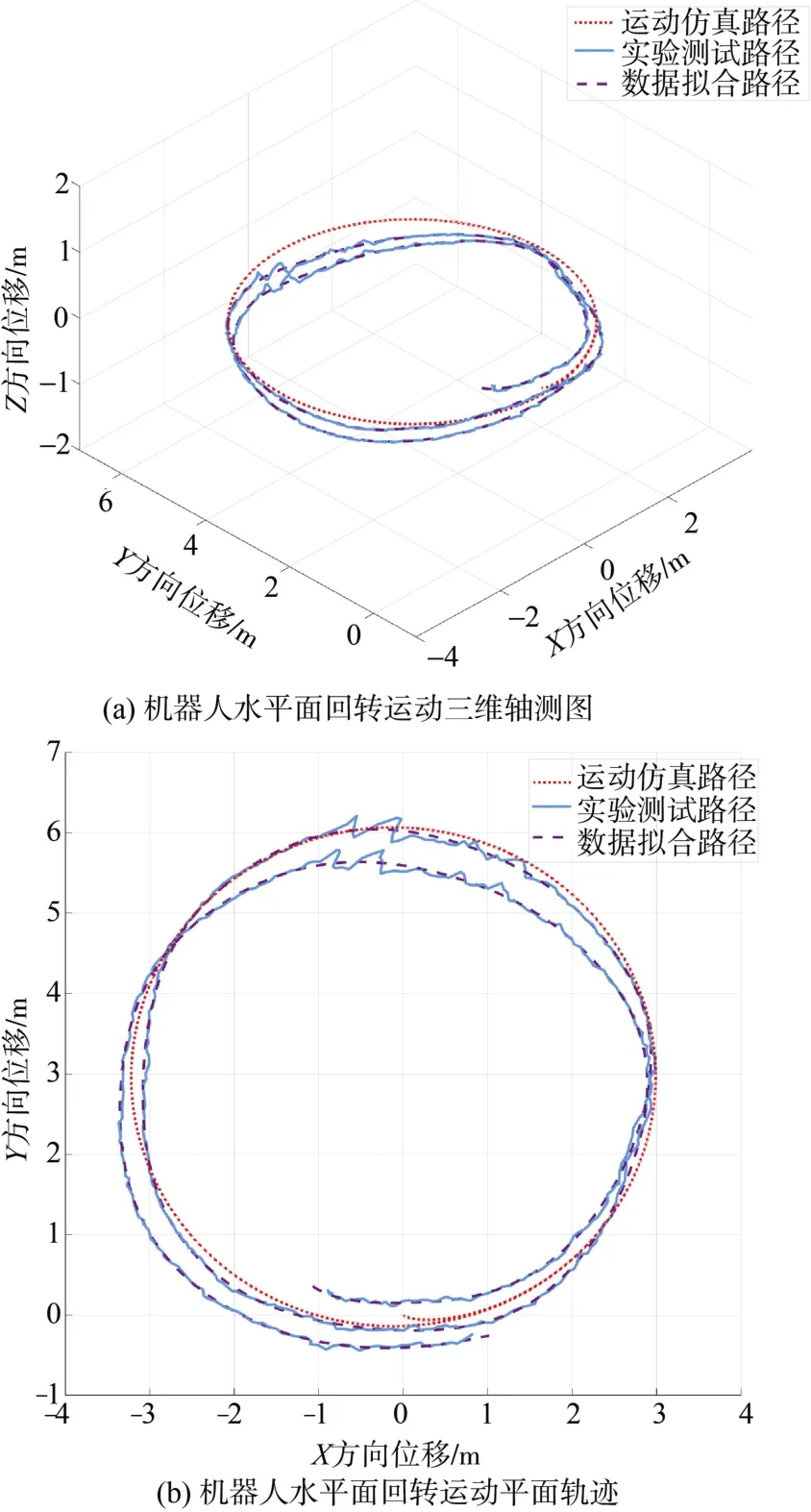
图12 机器人水平面回转运动轨迹Fig.12 Robot horizontal rotation motion trajectories
由于游泳池水流循环系统的影响,实验场地并非静水环境,存在随机水流的干扰。由运动轨迹可知,在第2圈回转运动过程中,机器人于1/4航程处偏航角发生了明显变化,导致后续运动轨迹发生了偏转,因实验环境与仿真环境一致性不高,误差较大。故以第1圈机器人轨迹进行数据分析,在推进力和摇艏力矩作用下机器人进行水平面回转运动,运动轨迹近似为圆,与仿真数据重合度较高,规律一致,最大偏移量为0.15 m,偏差小于5%,满足精度要求。实验结果表明机器人水平面回转运动特性与仿真结果相符,进一步验证了动力学模型的准确性。
5 结束语
仿生波动鳍水陆两栖机器人凭借隐蔽性强、机动性好等优点成为海洋设备的研究热点,然而由于现阶段仿生机器人仿生程度低、推进性能差、作业环境复杂等客观因素,使其在执行任务中面临着推进速度慢、效率低等困境。针对上述问题,本文围绕新型水陆两栖机器人水下动力学建模、水下操纵性数值仿真及实验验证等方面开展研究,仿真结果与实验结果误差均不超过10%,验证了动力学建模的准确性。相关成果为进一步研究多模态水陆两栖机器人运动性能奠定了理论与技术基础。
猜你喜欢
黑龙江大学自然科学学报(2022年1期)2022-03-29
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
中等数学(2017年2期)2017-06-01
中学数学杂志(高中版)(2016年6期)2017-03-01
中学生数理化·高一版(2016年2期)2016-05-30
浙江大学学报(工学版)(2015年2期)2015-05-30
新高考·高一物理(2014年1期)2014-09-18
火炸药学报(2014年1期)2014-03-20
计算物理(2014年2期)2014-03-11