石窟寺文物的三维精细化建模研究
2023-08-26 00:38:08郑国强王光生王万忠
山东建筑大学学报 2023年4期
郑国强王光生王万忠
(1.山东建筑大学测绘地理信息学院,山东 济南 250101;2.山东省古建筑保护研究院,山东 济南 250001)
0 引言
石窟寺属于古代庙宇建筑,建造时通常依附山势,从山崖壁面向内部纵深开凿,窟内多为代表宗教造像或宗教故事的壁画,是最古老的佛教建筑形式。2019、2020 年,习近平总书记相继考察了云冈石窟和莫高窟,指出这是人类文明的瑰宝,要坚持保护第一,在保护的基础上研究利用好[1]。 2020 年11 月,国务院办公厅下发了«关于加强石窟寺保护利用工作的指导意见»,明确到2022 年,石窟寺管理体制机制创新取得重要进展,石窟寺重大险情全面消除[2]。
石窟寺作为不可移动文物,受人为破坏和自然侵蚀的影响,遭受到不同程度的损坏,而文物数字化在文物保护和修复中具有不可替代的作用。 为了更好地保护文物,可以运用现代化手段获取文物的形体、纹理、材质等数据信息,为后期石窟寺文物的全方位保护提供科学的数据支撑。 现代化测绘技术如摄影测量和三维激光扫描技术已广泛应用于文博行业。 刘旭春等[3]描述了三维激光扫描的技术流程,并成功地应用在了古建筑保护行业中;郑书民等[4]依托新疆库车地区石窟数字化保护实例,研究了三维激光扫描技术在石窟立面测绘中的应用;李敏等[5]采用三维激光扫描仪在石窟中进行整体扫描,并建立石窟三维形状的框架,约束多视图重建计算中的空间解算误差,以实现石窟寺的精细化建模。但上述研究只考虑了文物模型的几何精度,未对模型的纹理精度开展相关研究,唐燕[6]利用近景摄影测量的方式完成了文物模型的重建,有效地提高了文物模型的纹理精度,实现了文物模型在虚拟场景的漫游;黄先锋等[7]将三维激光扫描技术与倾斜摄影测量技术相结合,实现了敦煌莫高窟及其内部洞窟的结构重建,为石窟寺文物建模提供了新的技术手段;王瑶瑶等[8]利用激光点云与地理信息技术结合对古建筑三维建模,实现了建筑空间和属性信息的查询、分析,但纹理映射采用虚拟仿真的方式并不能真实表达建筑的纹理信息。 可以看出,由于石窟寺所处环境复杂、体量大小不一以及开凿石窟造像所形成的特殊空间形态等因素,采用单一技术很难实现石窟寺几何数据和纹理数据的获取。 三维激光扫描技术能直接获取目标表面的三维空间信息,但很难获取高分辨率的纹理信息,而摄影测量技术却在此方面具有优势。 这两种技术在长期发展中形成互补,融合两种技术的数据建模具有重要的研究意义[9-10]。
文章提出以站式扫描仪获取的石窟点云作为整体控制网,手持扫描仪获取的复杂造像结构点云及高清数码相机获取的密集匹配点云作为主要数据源,实现石窟寺文物的几何重建;针对复杂模型的纹理映射问题,采用改进的薄板样条函数进行几何模型的纹理映射,从而实现石窟寺造像、雕刻和壁画的精细化建模,为实现不同体量的文物数字化提供有效的技术手段。
1 石窟寺三维精细化建模方法
1.1 研究区概况
驼山石窟位于山东省青州市驼山主峰东南崖壁上,是我国北周至唐代时期的佛教石窟寺[11],1988年被认定为全国重点文物保护单位。 驼山一号窟为方形平顶窟,开凿于初唐(618—712 年)及盛唐(712—762 年)时期,如图1 所示。 驼山一号窟石窟造像体量大、雕刻面积广、几何结构复杂且石窟造像、壁面绘有彩绘,采用单一的技术很难实现石窟寺的精细化建模,为此文章提出了一种多源数据融合的石窟寺精细化建模方法。
1.2 精细化建模流程
文物模型最主要的是保证数据的客观性和真实性,三维激光扫描技术能实现石窟寺文物的高精度几何重建,但模型纹理的分辨率较低,而摄影测量技术能获取高分辨率的纹理信息。 文章综合考虑三维激光扫描与摄影测量技术的优势和缺点,提出以站式扫描点云为整体控制网,实现影像密集匹配(Dense Image Matching,DIM)点云与手持精细扫描点云的高精度配准,以其配准融合点云为主要数据源,完成石窟寺文物的高精度重建,利用加权薄板样条函数的纹理映射方法对石窟寺模型进行纹理映射,实现石窟寺文物的三维精细化建模。 文章具体实现流程如图2 所示,其中坐标采集采用实时动态(Real-time Kinematic,RTK)坐标。

图2 石窟寺文物精细化建模流程图
2 石窟寺多源数据获取
2.1 三维激光点云获取
对于空间复杂的石窟寺文物而言,扫描获取的点云数据大、扫描周期长,因此扫描前需要现场勘测,制定合理的扫描方案。 扫描数据获取后,需要对点云数据进行去噪、配准、冗余去除等操作获取石窟寺建模所需要的点云数据。 三维激光扫描点云获取的主要流程如图3 所示。
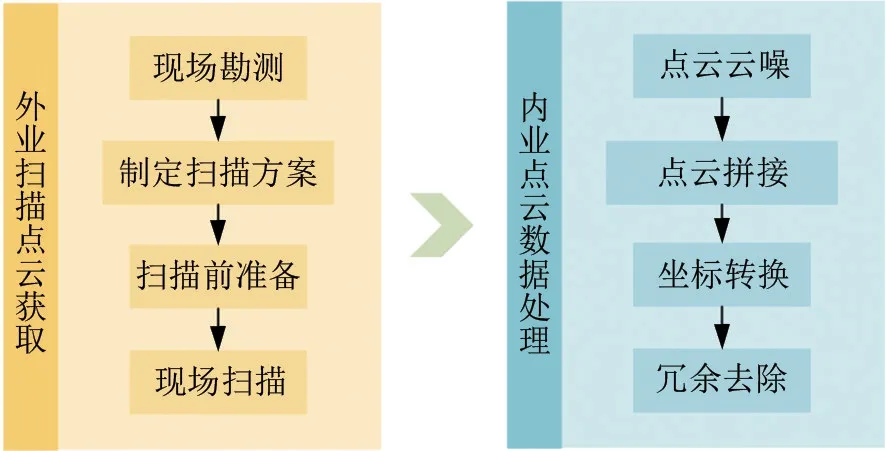
图3 激光点云数据获取流程图
文章采用架站式空间扫描仪Focus3D X330 和手持扫描仪GOSCAN50 获取石窟的点云数据。Focus3D X330 是一款具有超远距离扫描的高速三维激光扫描仪,GOSCAN50 是一款适用于近距离复杂曲面数据采集的高精度手持三维扫描仪,详细参数见表1。

表1 三维激光扫描仪参数表
2.1.1 站式扫描点云获取
根据驼山一号窟以及Focus3D X330 的扫描特点,选择窟内架设3 站、窟外架设2 站的方式进行扫描。 驼山石窟为国家重点文物,禁止人为及设备接触,无法在壁面粘贴标靶。 扫描时,在地面上放置棋盘板作为点云数据的控制点,棋盘板的放置角度与扫描仪的扫描光束之间入射角应>45°。 扫描参数设置为1/4 分辨率和4 倍降噪率。 获取站点点云后,采用Faro 扫描仪自带的SCENE 软件进行点云预处理。 一号窟站式扫描点云及细节图如图4 所示。 图4(a)是点云去噪、配准、冗余去除后获取的点云数据。 由图4(b)可知,石窟寺特殊的空间环境造成窟内遮挡严重,点云模型存在较多空洞。图4(c)中石窟的整体色彩明暗差异较大,文章不将其作为石窟寺建模的数据源。 但根据站式空间扫描仪全局精度高、覆盖范围广的特点,将站式扫描点云作为石窟寺建模的整体控制网,实现影像密集匹配点云与手持精细点云的融合配准工作。

图4 一号窟站式扫描点云及细节图
2.1.2 手持精细扫描点云获取
石窟寺内有大量复杂结构的文物造像,站式扫描仪的分辨率很难表现复杂造像的细节部分,因此需要手持扫描仪进行精细扫描。 手持精细扫描仪主要用于小尺度文物扫描,对于体量较大的石窟寺,完成整窟的点云采集不仅需要大量的时间,还会生成庞大的数据量,导致后期数据处理困难。 综合考虑建模精度及效率问题,文章只对石窟内复杂造像扫描。
GOSCAN50 能够实时处理生成预览点云,及时发现扫描点云存在的问题,但此现场处理点云的方式会大幅增加数据采集时间。 一号窟内造像众多,将其划分为石窟北壁、东壁、西壁3 个扫描区域,依次扫描不同壁面上的造像。 GOSCAN50 扫描仪可以获取造像的彩色信息,但分辨率较低且彩色扫描会大幅增加扫描周期和点云数据量,为后期数据处理带来困难,因此扫描参数设置为0.5 mm、不开彩色。在文物扫描的过程中要特别注意文物安全,禁止直接接触造像表面。 手持扫描仪获取的点云数据和站式扫描点云一样,需要预处理以获得文物造像的精细点云。 通过预处理后获取的造像点云模型如图5所示。

图5 一号窟文物造像精细点云图
2.2 影像密集匹配点云获取
在半封闭的石窟环境中,由于光照和扫描仪相机的分辨率等原因,其获得的彩色数据存在分辨率低、噪点大、光线不均等问题,需要用高清数码相机获取整窟的高分辨率影像数据。 文章选用佳能EOS 5DS 数码相机及50 mm 的定焦镜头采集石窟的色彩信息,其最高分辨率达到8 688 dpi×5 792 dpi。 影像密集匹配点云获取的主要流程如图6 所示。
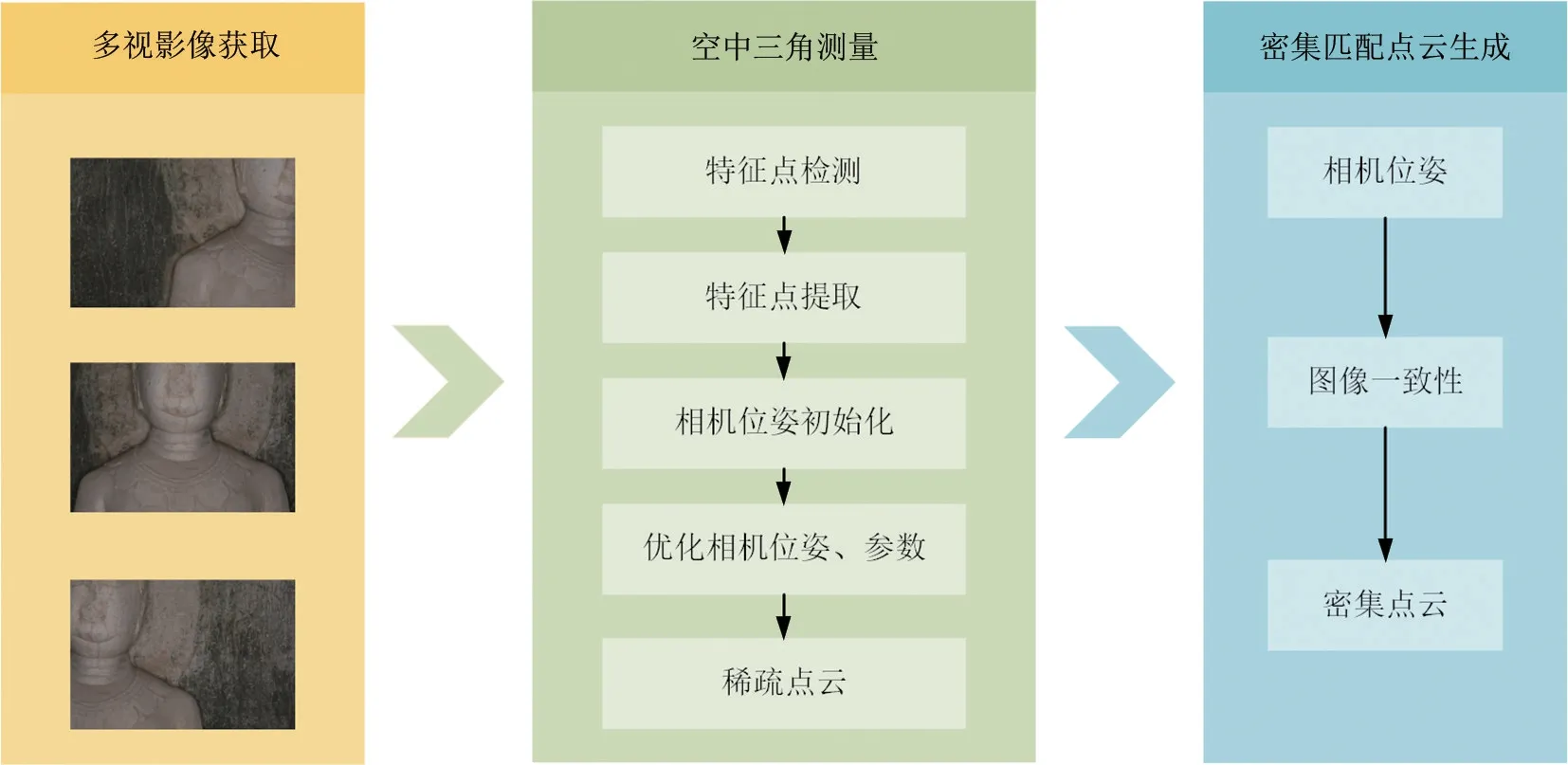
图6 影像的密集匹配点云重建图
由于石窟寺的特殊环境,相机需要挂载闪光灯对石窟寺进行彩色影像采集,保证在不同的角度、不同的目标下获得相同亮度及分辨率的影像。300 dpi是人眼能够识别的最大分辨率,为了保证文物模型纹理的真实性,拍摄获取的影像分辨率要满足300 dpi,拍摄距离要<1.2 m,并保证获取的影像数据重叠度>60%。 石窟寺的影像数据获取后,利用实景建模软件Context Capture 处理生成石窟的密集匹配点云,处理结果如图7(a)所示。

图7 一号窟密集匹配点云及细节图
相对于扫描仪的数据获取方式,相机拍摄获取石窟的影像数据更加灵活,不会受架站空间或扫描视角的限制。 通过近景摄影测量获取的密集匹配点云十分完整(如图7(b)和(c)所示),不会出现大的点云空洞,但影像密集匹配获取的复杂文物的点云不如三维激光扫描点云的精度高。
3 石窟寺文物精细建模的实现
为了实现多种技术的优势互补,多源、多分辨率的点云数据获取后,需要对点云进行配准融合获取石窟寺完整的高精度点云数据,通过点云数据的几何重建、纹理映射等实现石窟寺的三维精细化建模。
3.1 多源数据的点云融合配准
点云配准是精细化建模的关键,其配准精度直接影响几何模型的精度。 通过迭代最近点(Iterative Closest Point,ICP)算法[12]对不同方式获取的点云数据进行配准实验,检验其在不同分辨率点云中的配准精度。 经过控制点配准后的站式扫描点云具有真实的地理坐标信息,以此为整体控制网,完成文物造像细节点云与DIM 点云的高精度配准,点云数据通过经典ICP 算法迭代100 次后的点云配准效果图如图8 所示。

图8 点云配准效果图
从目视角度看,点云配准结果没有明显分层现象,配准效果较好,通过计算匹配点对的欧氏距离来检验ICP 算法的点云配准精度[13],DIM 点云与手持扫描点云配准后的匹配点对欧氏距离分布图和配准残差直方图如图9 所示。

图9 点云配准精度报告图
由于遮挡问题,通过不同方式获取的数据并不完整,且手持扫描仪只扫描文物造像部分,有些点在阈值内没有匹配点,此时点云在欧氏距离分布图中为黑色,匹配点对欧式距离分布图中颜色由深蓝到深红变化表示配准精度逐渐降低。 由图9 可知,点云的整体配准误差分布均匀,不存在配准精度突变现象。 以站式扫描点云为控制网完成DIM 点云与手持精细点云的配准过程会出现误差累积,两步点云配准过程中的配准误差统计见表2。
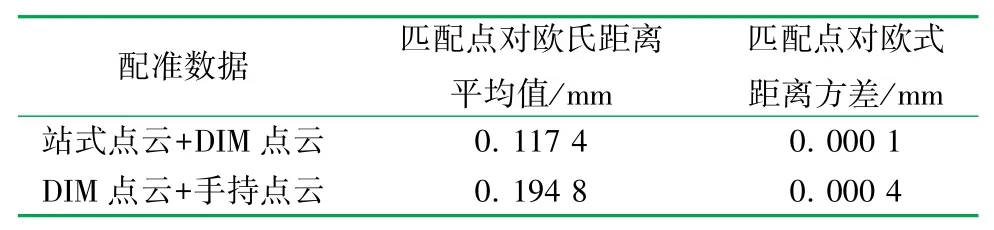
表2 点云配准后匹配点对的欧氏距离均值和方差表
上述数据处理方案会出现误差累积现象,由表2 可知,最终点云模型与整体控制网之间的平局误差累计<4 mm,模型精度较高。 手持扫描仪获取的点云数据精度高,可以很好地保留造像的细节特征,配准后需要人工编辑点云,保证文物造像部分重建以手持扫描点云为主。
3.2 点云模型重建及修补
点云数据获取后,需要对其表面重建,获得石窟寺文物的三维网格模型。 采用效果好、效率高的泊松算法[14]进行三维点云的表面重建。 泊松算法既考虑了所有的点数据,又不需要进行多叉树的三维点云划分及三维表面融合处理,因此该方法能够很好地抑制点云数据存在的噪声,创建出更加真实的表面几何模型。
文物数字化模型重建时,保持数据的客观性至关重要,在优化模型时需要考虑对模型精度的影响,几何模型优化图如图10 所示。 由图10(a)可以看出,通过泊松重建后,模型表面存在许多孤立几何体需要剔除,冗余剔除后的效果如图10(b)所示。 由于目标遮挡、数据采集不全等原因,模型表面存在不同大小的空洞,对于石窟文物模型表面规则区域的小面积且外形上无争议的空洞可以进行修补,而特征明显或面积较大的空洞应考虑石窟现状,结合具体情况确定空洞是否需要修补,图10(c)中空洞较小且没有明显的造像特征,可直接利用插值法进行修补,其结果如图10(d)所示。

图10 几何模型优化图
3.3 基于加权薄板样条函数的纹理映射
通过几何重建可以获取高精度的三维网格模型,但其并不能真实表达目标的纹理信息,缺乏可辨识性,尤其是石窟文物具有丰富的彩绘信息,需要对几何模型进行纹理映射。 纹理映射是将二维影像映射到三维模型表面[15],生成模型表面所需要的细节。
3.3.1 加权薄板样条函数纹理映射原理
原始薄板样条函数[16]通过控制点的强制对应实现二维影像到三维模型的纹理映射,没有考虑控制点的误差影响。 平滑薄板样条函数[17]虽然整体约束了控制点,但在实际应用中每个控制点的精度并不相同,其对薄板样条的约束力也不一样,当控制点精度较低时,采用同一个约束条件完成的影像与几何模型的配准必然会存在较大误差。 因此,需要对不同的控制点赋予不同的权值,使每个控制点都能在不同的弹性系数下发生薄板变形,从而提高纹理映射的准确性和稳定性。
在待配准的影像上标定n对控制点Pi和Qi(i=1,2,…,n),配准后对应控制点之间的距离h由式(1)表示为
式中h为对应控制点之间的距离,mm;f为薄板样条函数;P、Q为对应控制点的坐标。
原始的薄板样条函数f应满足的条件由式(2)表示为
式中J为薄板样条函数中的能量函数。
根据优化理论,通过引入罚函数的方法可以将严格的薄板样条约束问题转化为非约束问题,建立的函数由式(3)表示为
式中λ为引入罚函数;为变换后控制点之间的距离平方和;λi(i =1,2,…,n) 为每个控制点的权值,由每组控制点的精度决定。
3.3.2 3 种纹理映射方法结果比较分析
通过原始薄板样条函数、平滑薄板样条函数和加权薄板样条函数对造像进行纹理映射实验,结果如图11 所示。 图11(a)为原始薄板样条函数的纹理映射结果,a1 位置为两幅纹理影像的接边部分,此处位于映射边缘,通过严格对齐控制点后造像的映射纹理出现了拉花现象,纹理影像只有中间区域映射效果较好,周围区域都被过度拉伸,映射结果并不能达到石窟寺文物数字化要求;图11(b)为平滑薄板样条函数的纹理映射结果,通过整体约束控制点,造像的整体效果明显提升,由于其面部结构复杂,在a1 接边处还是存在纹理虚化现象,虽然平滑提升了整体效果,但还是存在局部拉花现象;图11(c)为加权薄板样条函数的纹理映射结果,造像中纹理优化明显,能够达到复杂模型的高精度纹理映射要求。 在a2 区域3 种纹理映射效果都比较好,说明在简单模型中通过3 种纹理映射方法都能达到很好的映射效果,文章映射方法对复杂模型的纹理映射更有针对性。
通过加权薄板样条函数的纹理映射方法对石窟寺的几何模型进行纹理映射,纹理映射完成后对模型进行匀光匀色和纹理接缝处理,获取石窟寺的文物高保真模型。 驼山一号窟的精细化建模结果如图12 所示。
3.4 不同建模方法模型精度比较分析
根据建模流程分别对三维激光点云数据、近景摄影测量数据建模,与多源数据融合建模模型进行对比分析。 建模过程采用同一组控制点数据,不同建模方法获取的模型位置精度相近,不再对模型位置精度评价,只对比分析模型几何精度和纹理精度,结果如图13 和14 所示。

图13 局部单一数据与多源数据几何模型对比

图14 局部单一数据与多源数据模型纹理结构对比图
对石窟的复杂造像部分比较分析,由图13 可知,近景影像模型和激光点云模型很难表现复杂造像的细节部分,造像面部信息损失严重;文章提出的融合建模方法能精确地保留造像复杂结构的细节特征,充分保证文物数字化模型的客观性和真实性。由图14 可知:激光点云模型受石窟内外光线影响,造像模型的纹理映射结果失真现象严重;近景影像模型是通过高分辨率的纹理影像重建生成,造像表面的纹理分辨率得到明显改善,但在纹理映射过程中需要对纹理影像做重采样处理,大大降低了造像纹理的分辨率;通过加权薄板样条函数的纹理映射结果纹理清晰、真实,映射过程不对影像重采样,能尽量保证石窟造像的原分辨率映射。
4 结论
通过上述研究,得到如下结论:
(1) 以站式扫描点云为整体控制网、手持扫描点云和DIM 点云为主要数据源,通过经典ICP 算法进行多源点云配准,加权薄板样条函数实现几何模型的纹理映射,能够获得石窟寺文物的高保真模型。与单一数据模型相比,多源数据模型既能保证模型的几何精度,又能兼顾模型的纹理分辨率,为后期的文物保护和修复提供了科学的数据支撑。
(2) 与其他纹理映射方法相比,加权薄板样条函数的纹理映射方法避免了特征复杂位置纹理错位、拉花等现象,文物模型纹理清晰、真实,能够实现复杂模型的原分辨率纹理映射,有效地解决了点云重建模型纹理分辨率低的问题。
猜你喜欢
安徽师范大学学报(自然科学版)(2022年3期)2022-07-14 03:54:42
数学物理学报(2021年3期)2021-07-19 06:02:36
重型机械(2020年2期)2020-07-24 08:16:12
大社会(2020年10期)2020-02-21 01:37:52
西夏学(2018年2期)2018-05-15 11:27:18
制造技术与机床(2017年7期)2018-01-19 02:30:00
软件(2017年6期)2017-09-23 20:56:27
计算机测量与控制(2017年6期)2017-07-01 16:24:14
丝路艺术(2017年6期)2017-04-18 13:59:08
西夏学(2016年2期)2016-10-26 02:22:40