
基于LSTM 网络预测智能车辆变道的路径规划研究
2023-08-24 06:48周义棚
智能计算机与应用 2023年7期
杨 威, 周义棚
(上海工程技术大学机械与汽车工程学院, 上海 201620)
0 引 言
现如今,研究可知大多数情况下,在车辆超车或变道避障的过程中更可能发生事故[1]。 对于自动驾驶汽车来说,为了保障道路中的安全高效行驶,自动驾驶汽车就必须了解周围车辆的意图,再基于此来调整自身行为。 通常,有经验的驾驶员就可以判断出未来几秒钟周围车辆的运动。 但当前大多数高级驾驶辅助系统(ADAS) 却仍无法进行此类预测[2]。 随着大数据的发展,越来越多的研究者正尝试从历史轨迹数据入手来对车辆轨迹进行预测。 在各类研究中,最常见到的就是基于循环神经网络(RNN)的车辆轨迹预测,这也是该领域的基础研究课题。 递归神经网络(RNN)具有根据反馈连接节点存储扩展时间间隔的历史信息的能力,可以训练并应用于预测[3]。 然而传统RNN 的梯度消失及梯度爆炸问题限制了其应用和发展,LSTM 网络的出现很好地解决了这一问题[4]。 Wang 等学者[5]使用High D 数据集对长短时记忆(LSTM)网络进行训练用于预测周围车辆的轨迹。 根据周围车辆的预测轨迹信息,提出了基于风险评估和风险缓解的路径规划算法。 黄玲等学者[6]为了提升网络模型的迁移性,引入道路横向偏移量信息,可将LSTM-LC 模型精度和迁移性提升约10%。 黄蕴麒[7]将历史轨迹中的特征信息速度差、车头时距引入到LSTM 网络模型中,能够明显增强轨迹预测的效果,并对加入不同车辆状态信息的网络模型进行对比。 曾德全等学者[8]在LSTM 网络输出中加入混合密度层,使用Softmax函数计算概率分布来表示车辆未来位置,而非仅仅预测一条确定的轨迹,以提高预测结果的可靠性和模型的鲁棒性。
对于车辆换道轨迹拟合,现有模型主要包括样条插值模型[8]、多次多项式模型[9]、正余弦模型[10]等。 由此取得的研究成果有:张颖达等学者[11]通过NGSIM 数据集对换道数据进行提取,分析换道行为的围观特征,并使用多项式对轨迹进行拟合,得出车辆换道横向轨迹由5 次多项式拟合效果最佳。 Zeng等学者[12]应用了含参数的三次B 样条曲线规划换道轨迹,基于提前选定的控制点,考虑与周边车辆的防碰撞约束,规划出曲率连续的轨迹。 黄晶等学者[13]通过问卷调查的方式得到驾驶风格的数据,通过建立不同风格驾驶人的行车安全区域,进而使用五次多项式规划出适应驾驶人风格的换道轨迹。 赵树恩等学者[14]提出遗传算法-BP 神经网络理论对换道终止时刻及目标位置进行预测,六次多项式用于描述车辆换道轨迹簇,运用鲸鱼优化算法对轨迹簇进行优化,从而得到最优路径。
上述研究大多依赖于NGSIM 数据集来进行预测,但数据集存在噪声干扰、换道数据缺失或车辆ID 重复使用等问题,所以本文对于换道数据的提取规则进行改进,对其提取出的数据进行平滑处理,避免路径出现尖峰等现象。 同时,利用LSTM 网络模型对变道终点位置进行预测。 根据预测终点的结果,围绕其生成多个等间距的点,使用准均匀三次B样条曲线来对变道的轨迹进行拟合,最后综合考虑变道安全性及舒适性选取最优变道路径。
1 基于LSTM 网络的轨迹终点预测
1.1 数据处理
本文预测的数据集采用美国高速公路行车NGSIM 数据集,包括US-101 在内的道路上所有途径的车辆在一个时间段内的行驶状态。 通过7 个不同位置的摄像头获取到数据集,然后利用软件加工成轨迹点进行记录。 本文选取US-101 路段的数据集作为预测轨迹的研究数据,US-101 高速公路研究区域长640 m,包括5 条主车道及1 个出入口。本文只考虑主车道上的换道轨迹数据,即车道标号1~5 的数据。 研究区域及道路如图1 所示。

图1 数据研究区域Fig. 1 Data study area
由于NGSIM 数据集中会存在车辆的ID 被重复使用的情况,所以用同一车辆ID 的全局时间作为索引建立切割列表,而后对同一车辆的数据按列表进行切割,由此判断每一辆车是否产生了变道的行为。同时,车辆存在连续多次变道行为及变道前后产生波动,难以识别其单次变道的起点和终点,如图2 所示。 影响换道轨迹数据的有车道线位置附近的波动导致换道起点识别错误、识别起点与实际起点不一致、变道终点难以识别等问题。 所以根据本文需要的数据重新定义变道规则为:
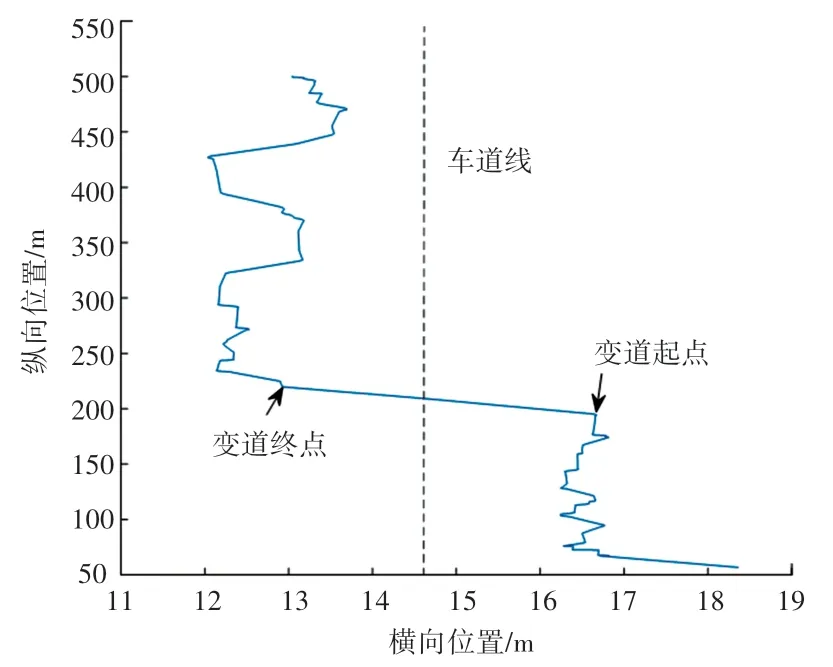
图2 车辆轨迹图Fig. 2 Vehicle trajectory diagram
(1)在一定时间内只进行一次向快车道变道,不存在连续多次变道的情况。
(2)96.8%的车辆换道的持续时间在10 s 以内,所以本文对车辆的变道时间进行筛选,取变道点前后5 s 左右时间内的数据为完整的单次换道数据,整个换道过程时间在10 s 左右,包含100 条轨迹数据。
(3)变道路径的起点、终点位置都在阴影中,对此可表示为:
其中,x1、x2分别表示在车道ID 改变前后时刻车辆的横向位置;为2 条车道的分界线;xs与xe分别为换道起终点的横向位置;l为车道宽度。 车辆换道起终点位置约束如图3 所示。

图3 车辆换道起终点位置约束图Fig. 3 Restriction diagram of starting and ending positions of vehicle lane changing
(4)考虑到实际驾驶的舒适性,对变道过程的最大横向加速度约束可用如下公式进行描述:
其中,af为变道实际终点位置的加速度,as为变道实际开始位置的加速度。
同时,原始数据由视频处理软件获取会存在系统误差和检测误差,导致符合变道规则的路径会出现尖峰、平滑性较差。 为获取符合正常运行车辆的参数,采用指数加权移动平均(EWMA)对轨迹数据的横纵坐标进行平滑处理,即:
其中,为换道车辆在t时刻的拟合值;a为权重系数;xt为t时刻的真实值。 综上得到的变道数据为有效样本数据。 车辆轨迹平滑处理如图4 所示。
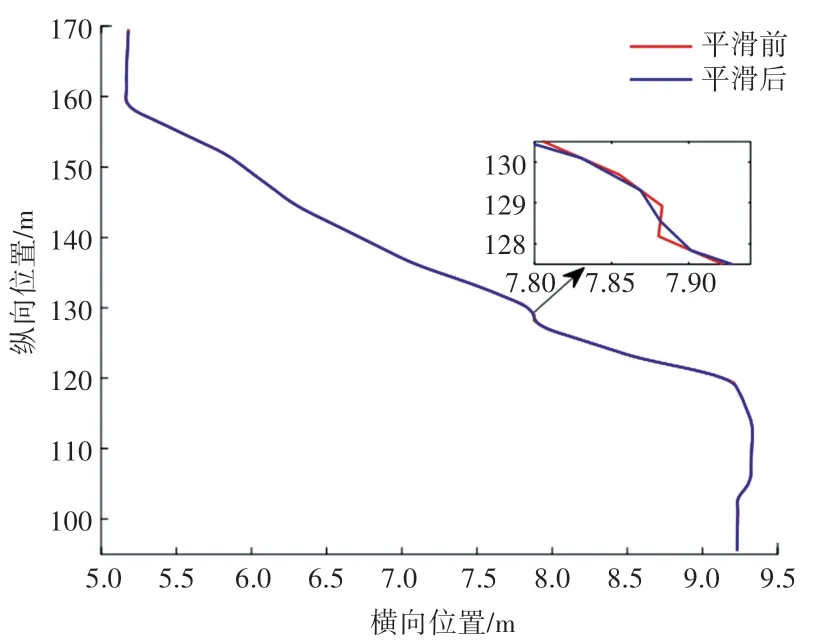
图4 车辆轨迹平滑处理图Fig. 4 Vehicle path smoothing diagram
1.2 长短时记忆网络模型及评价指标
车辆轨迹预测问题本质上是根据车辆的历史状态来预估车辆未来的状态。 输入历史时刻的车辆位置、速度、加速度等信息,输出未来时刻的车辆状态信息位置。 长短时记忆网络(LSTM)模型可以解决RNN 模型在处理时间序列较长时容易出现梯度消失的问题。 本文选用LSTM 网络模型对车辆换道的终点位置进行预测,基本结构如图5 所示。 首先,遗忘门会读取上一个产生的输入Ht-1和当前时刻的输入Xt,经过遗忘门后输出Ft为:

图5 LSTM 网络结构示意图Fig. 5 LSTM network structure diagram
其中,σ采用Sigmoid函数作为激活函数;Wf为权重矩阵;bf为偏置向量。 经过输入层门后输出It为:
接下来,tan 层会创建新的候选向量,将旧的向量ct-1更新为新的ct:
输出门利用Sigmoid函数确定哪个部分的数据会被输出,数学公式具体如下:
最终的输出Ht为:
LSTM 网络模型的评价指标选择均方根误差(RMSE),可用来衡量观测值与真实值间的偏差,能更直观地体现模型的误差。 均方根误差值越大,说明模型的误差越大。RMSE可由如下公式来求值:
LSTM 网络模型的参数设置如下:预测时间序列为10,迭代次数为500,学习率为0.001, 学习率下降系数取0.9,使用Adam 优化算法更新模型参数。 模型的评价指标为6.064 1,要好于文献[7]中XY-LSTM 模型的7.701 66,提升约14.25%。 说明本文提出的换道轨迹数据筛选方法及平滑策略对轨迹预测有更好的效果。
2 变道轨迹模型
2.1 变道安全区域
车辆在变道过程中潜在的碰撞场景如图6 所示,车辆1 为目标车道后车,车辆2 为本车道的前车,P1和P2分别为自主车辆与其他车辆的潜在临界碰撞点,s1与s2分别表示在碰撞点时自主车辆的位置。 以车辆的运行方向为x轴,垂直方向为y轴,自主车辆变道起始时刻车辆前方平行于车道的位置为坐标原点建立坐标系。 同时,将车辆模型简化为椭圆模型[15],以车辆中心为椭圆的原点,则长轴LX为:
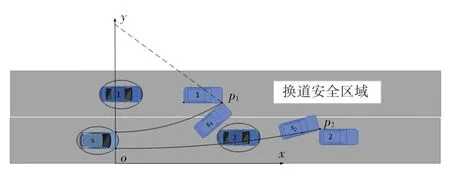
图6 换道安全区域图Fig. 6 The diagram of lane change safety area
其中,v1为后车车速;v2为前车车速;Td为驾驶员风格因子,取常规0.5;在P1和P2碰撞点不发生碰撞的最小安全距离的计算公式见如下:
若车辆s的速度小于车辆2 的速度,随着时间的增加,两车的距离被不断拉大,这时车辆s在换道过程中不会与前车2 发生碰撞。 只有当车辆s的速度小于车辆2 时,随着换道过程时间的增加,两车的相对距离缩小,当小于最小的换道安全距离时将会出现碰撞的现象。 所以认为此时的碰撞点为P2,碰撞时刻为tp2(ts <tp2<tf),则P2点的坐标(xp2,yp2) 表示为:
若目标车道后车车速过快,自主车辆在换道前未与后车保持足够的安全距离,则换道会产生碰撞点P1,碰撞时刻为tp1(ts <tp1<tf),则P1点的坐标(xp1,yp1) 表示为:
根据式(11)~(15)即可求得换道车辆与当前车道前车及目标车道后车的潜在碰撞点的坐标,从而确定车辆换道安全域范围。
2.2 轨迹数学模型
轨迹的数学模型采用准均匀三次B 样条曲线,保留了贝塞尔曲线在2 个端点处的性质:端点处的切线即为最后2 个端点的连线。 同时,曲线的次数越高,将会有很多零点存在,较多的导数零点会导致曲线存在较多的极值,使曲线出现较多的峰谷值。选择三次B 样条曲线生成几何路径,即用6 个控制点生成一个路径片段,然后通过片段的拼接就可以实现从初始状态到目标状态的路径规划。 样条曲线控制点如图7 所示。 由图7 可知,P0点为规划的起始点,定义为P5为预测得到的换道终止点为在变道避障过程中,第一个控制点及最后一个控制点是已知的,其余的控制点未知。 为了方便计算,假设变道前后的路径曲线满足中心对称,P1点与P4点分别在中点处。 在变道的起点与终点处车辆的航向角始终与车道的中心线平行。 那么有P0,P2与P3,P5的连线均为直线且大小为L。所以全部的控制点可得出:

图7 样条曲线控制点Fig. 7 Spline control points
由于不同的驾驶员有不同的驾驶习惯会导致在实际行车中变道时间长短及变道路径长度的不同,这部分问题是神经网络模型无法预测的。 所以根据预测终点的结果,围绕预测终点生成多个等间距的点作为轨迹簇的终点,同时对L的大小进行约束,使控制点的自由度降为2,就可以得到一系列变道的曲线簇。 这里涉及用到的数学公式为:
其中,Δx表示自主车辆与前车的距离;tL表示车辆走过L所用的时间;Ls表示纵向安全距离。
3 代价函数计算
综合考虑舒适性及安全性选择一条最优路径作为变道的最终路径。 在最优路径点筛选上选择线性加权法、即多目标转单目标的方法。 总代价函数表示为:
其中,wc和ws分别为舒适性和变道效率的代价函数权重值;fc(i) 为第i条路径的舒适度代价函数;fs(i) 为第i条路径的安全性的代价函数。
将换道起点与终点处自主车辆与前后车的距离作为安全性的代价函数,距离越大、越不容易发生碰撞,安全性越好。 因为代价函数需要最小的代价,所以取倒数作为安全性的代价函数:
路径的舒适性也是路径规划的重要代价指标之一。 路径曲率过大不仅会降低乘坐舒适性,也会增加路径跟踪控制的难度,进而导致车辆行驶稳定性下降。 由于曲率与路径的平滑性高度相关,路径的曲率变化越小,则路径越平滑;反之,曲率变化越大,则路径变化越剧烈。 所以,影响舒适性的因素主要是路径的平滑性,规划的轨迹越平滑,相应地、舒适性就好。 舒适性代价函数的数学定义式为:
同时,为了平衡安全性与舒适性之间的数量级差异,需要分别对其进行标准化处理,数学计算公式具体如下:
其中,fn(i) 为安全性或舒适性的代价函数,maxfn为所有路径中代价函数最大的代价值。
4 仿真结果分析
为了验证所提出规划方法的可行性,利用Carsim 与Matlab 联合仿真对所提出的路径规划算法进行仿真验证。 同时,采用基于预瞄点的滑模控制算法对规划的轨迹进行跟踪验证,仿真场景为同向双车道,自主车辆距本车道前车的距离为60 m,距目标车道车辆距离为20 m。 车辆及其他参数见表1。

表1 仿真参数Tab. 1 Simulation parameters
根据2.1 节划分的变道安全区域,碰撞时刻tp1和tp2分别为5.88 s 与9 s,由式(11)可得出长轴LX为2.979 5 m,碰撞点P1的坐标可由式(12) 和式(15) 得出为(44.78,5.1),碰撞点P2的坐标通过式(13)、式(14) 得到,得到的结果值为(151.131 2,2.8)。
根据2.2 节轨迹的数学模型可以得到预测路径的换道中心点为(149,4),在所定义的换道安全区间内,与前后车都不会产生碰撞,也就是说根据预测的终点位置及约束生成6 条具有不同终点位置的变道路径都是无碰撞的路径,变道路径规划起点的横坐标为104 m,预测到的路径终点横坐标为192 m,向预测终点前后各取等距离的间隔长度作为其余路径的终点如图8 所示。 所有变道路径的安全性及舒适性的代价图如图9 所示,代价值最小的为第一条路径0.96,最大的为第6 条路径、0.999 3,代价值最小的第1 条路径即为变道的最优路径。 采用基于预瞄点的滑模控制算法对最优路径进行跟踪如图10所示,在变道的起点及终点处跟踪误差较大,横向跟踪误差最大为0.1 m,发生在变道完成、即将直行的时刻。 仿真结果表明,规划的算法在安全区域内可以为自主车辆提供一条无碰撞的最优路径。

图8 不同终点变道路径图Fig. 8 Path diagram of lane change at different end points

图9 路径代价图Fig. 9 Path cost diagram

图10 最优路径跟踪Fig. 10 Optimal path tracking
5 结束语
本文使用LSTM 网络对换道终点位置进行预测。 首先,通过NGSIM 数据集对单次换道数据的提取进行重新定义。 其次,对于部分轨迹存在的尖峰及波动等现象,采用指数加权移动平均(EWMA)对轨迹数据的横纵坐标进行平滑处理,使得网络模型的精度提高了14.25%。 建立了行车的安全区域模型,分析与前后车发生碰撞点的坐标及不发生碰撞的最小安全距离,同时对预测结果进行验证。 最后,使用样条曲线对轨迹进行拟合,在安全性与舒适性的评价指标下综合筛选出最优路径。 仿真结果表明本文所提出的路径规划方法可以为自主车辆提供安全无碰撞的最优路径。
猜你喜欢
卫星应用(2021年11期)2022-01-19
科学大众(2021年9期)2021-07-16
中国交通信息化(2020年11期)2021-01-14
建筑热能通风空调(2018年5期)2018-07-09
海峡姐妹(2017年12期)2018-01-31
池州学院学报(2017年3期)2017-10-16
作文与考试·初中版(2017年12期)2017-04-19
消费者报道(2016年3期)2016-02-28
中国交通信息化(2015年10期)2015-06-06
中学生(2015年12期)2015-03-01
