
一种考虑速度引导的路径信号协调控制模型
2023-08-24 06:48王品乘江勇东徐乃云
智能计算机与应用 2023年7期
王品乘, 蒋 韬, 江勇东, 梁 华, 徐乃云
(1 悉地(苏州)勘查设计顾问有限公司, 江苏 苏州 215123; 2 苏州市公安局姑苏分局交通警察大队, 江苏 苏州 215000)
0 引 言
在城市拥堵问题日益突出的背景下,信号协调控制作为常规手段之一,有助于改进协调控制方法及疏导协调控制对象,研究意义显著。 然而,当下的信号协调控制方式仍然以干线协调控制或单一交叉口的单点信号控制为主,对于一个区域范围而言,区域范围内除了包含主干道外,还由主干道周边的次干道或支路组成,对于较为复杂的城市路网来说,通过管理城市道路上的交通流提高网络性能进行路径的协调控制更为重要[1]。
在信号协调控制方面,应用较为广泛的是绿波控制,国外主要依据于MAXBAND 这一模型基础,通过最大绿波带宽优化方法进行干线信号协调控制,最早由Little 和Gartner 等学者于1981 年提出[2]。 随后,为了解决MAXBAND 带宽不变这一缺陷,Gartner 等学者[3]于1990 年又提出了MULTIBAND 模型,考虑了城市干道交通中不同路段不同交通量对带宽有不同需求的情况,加入交通流量不均衡系数。 国内学者对于绿波带宽的研究多基于MAXBAND 模型进行相应的改进,卢凯等学者[4]通过引入绿波带宽分配影响因子与带宽需求比例系数,构造了一种新的绿波协调控制模型,对基本的MAXBAND 模型进行了改进,以双向不同的绿波带宽之和最大位目标函数进行优化控制。 吴伟等学者[5]基于车路协同环境下的动态路径流量、初始排队长度等信息,建立了双向协调路径、车辆动态速度和交叉口配时参数的集成优化模型。 随着路径选取及区域联动控制的发展,YAO 等学者[6]通过相邻交叉口相位映射理念,提出了绿波带带宽协调率的概念,并在此基础上建立了一种面向多路径的信号协调控制模型。
速度引导策略是一个较新的概念,在车联网环境下应用较为广泛,国内外研究主要通过根据相邻交叉口的相位差、路段长度等因素给予车辆合理的引导速度。 国外研究中,Zhao 等学者[7]提出了一种考虑速度引导的跟驰模型策略,并考虑了驾驶行为的分析和网联车辆的比例对驾驶的影响。 Tang 等学者[8]将速度引导策略引入跟驰模型中,研究单车道多信号交叉口的驾驶行为和燃油消耗,并进行模型改进分析,使模型能有效降低燃油消耗和平均停车时间。 Wu 等学者[9]基于车辆的城市快速路出入口匝道的交通量,进行了车联网环境下针对快速路的车速引导策略研究。 国内研究中,陈大山等学者[10]针对城市快速路,将速度引导作为控制变量,建立了宏观动态交通流模型,对速度引导进行优化设计。 谷联强[11]根据驾驶员和车辆对引导速度的响应特点,利用驾驶模拟器仿真平台标定模型参数,研究了考虑驾驶员操作特性的速度引导方法,提高了速度引导方法的适应性。 夏井新等学者[12]针对干线绿波带宽宽度固定的缺陷,将交通流运行的速度波动性考虑其中,建立了一种带宽不固定的协调控制模型。
1 适用于路径子区协调的速度引导模型
通勤交通行驶路径的选择对于减少其在途行程时间,实现城市路网的“畅通工程”影响显著,在起讫点间所有路径中,其关键度最高的路径称为关键路径[13]。 对关键路径进行有针对性的协调控制,可以有效提升日常通勤效率。
1.1 路径子区协调的必要性
关键路径在城市道路中通常表示为“Z”型路径,不同于干线,车流总是在研究的主干道方向行驶,路径上的车流从O点行驶至D点的过程中,也需要兼顾次干道的车流。 因此,在进行路径信号协调控制研究时,首先需要对确定的路径进行协调子区的划分,对各个子区及子区的衔接段进行分别的协调控制,从而满足对整体路径的协调控制效果。
对于子区划分协调控制阀值的设定参照模糊数学中的隶属度函数原理,自变量为相邻交叉口路段关联度,其函数值符合正态分布,函数表征见式(1)[14]:
其中,x表示路段关联度,当x <0.25 时,不需要对其路段进行协调划分;当x≥0.5 时,需要对其路段进行协调划分;当0.25 ≤x <0.5 时,根据隶属度函数,求出函数的拐点处的临界值τ(x0), 若τ(x) ≥τ(x0),则需要进行协调划分,如图1 所示。
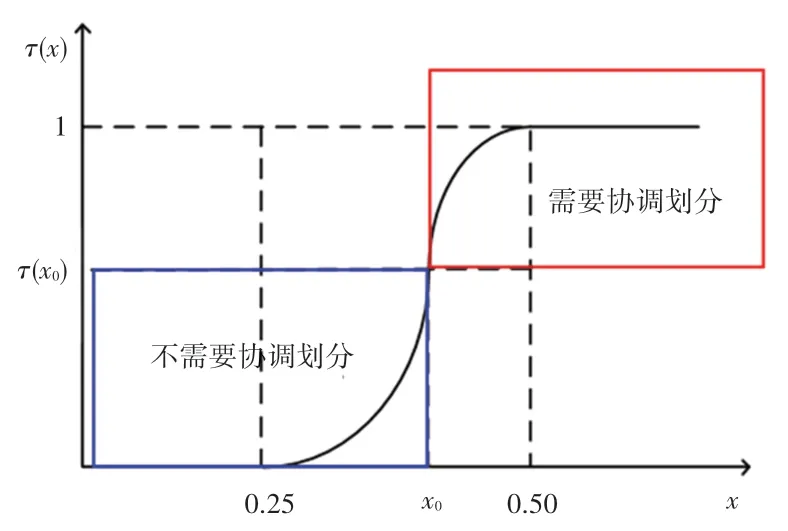
图1 路径协调划分隶属度函数图Fig. 1 Membership function diagram of route coordination division
1.2 速度引导控制模型
速度引导旨在通过给上游交叉口车辆设定一个建议车速,使车辆能够集结成车队高效有序地通过下游交叉口,避免车队离散,可以很好地适用于各子区的衔接路段中。 通常的引导策略有匀速引导策略、加速引导策略和减速引导策略,如图2 所示。

图2 速度引导原理Fig. 2 Speed guidance principle
在进行速度引导模型选择时,需依据车辆到达下游的相位时刻进行判定。 假定车辆在路段的行驶速度为v0,车辆距离下游交叉口停车线距离为l,交叉口信号周期长度为C,t0为信号周期中当前相位的时刻,a为车辆的加速度;Vm为车辆最高行驶速度(通常是路段限速),车辆从引导处到达下游交叉口停车线的时间为t, 车辆到达时信号周期所处的时刻为t1,[0,X] 为绿灯时间,[X,C] 为红灯时间。
当车辆匀速行驶时,可得式(2)和式(3):
当t1∈[0,X] 时,不需要对车辆进行速度引导,车辆可以以该速度继续行驶,通过下游交叉口;当t1∈[X,C] 时,则需要对车辆进行速度引导,具体的引导模型如下。
(1)加速引导模型。 当t1∈[X,C] 时,且通过车辆加速引导,可以使得其在赶上下游交叉口绿灯时间,即使得t1∈[0,X],可以对其进行加速引导,设其引导速度为vg,其中vg≤vm,vm为路段最大限速。 车辆经过匀加速至引导速度,并匀速行驶2 个阶段,此时车辆从引导处到达下游交叉口的行程时间为:
(2)减速引导模型。 当t1∈[X,C] 时,若对其进行加速引导,即便以路段最大限速行驶,车辆也无法在当前绿灯时间内通过下游交叉口,则对其进行减速引导,使车辆在交叉口集结成新的车队,在下一个周期的绿灯时间内通过下游交叉口。 此时:
车辆经过匀减速行驶和匀速行驶两个阶段,设其行驶时间分别为ta和tb,且t=ta+tb,则:
(3)下游交叉口存在车辆排队的速度引导模型。 在实际情况中,下游交叉口往往存在车辆排队,此时若对车辆进行速度引导,车辆会存在跟车行驶的减速阶段,特别是在加速引导的情况下,车辆会经过匀加速、匀速和匀减速行驶三个阶段,设3 个阶段的行驶时间分别为:t1、t2和t3, 可由如下公式进行描述:
则车辆最终到达交叉口时间vt为:
其中,LQ为下游交叉口车辆排队长度。
2 考虑速度引导的城市路径信号协调控制模型
在进行了路径的协调子区划分和速度引导控制的研究后,需要对各个协调子区进行合理的协调控制。 通过在MULTIBAND 模型的基础上加入了带宽不对称的优势,建立不对称绿波带宽协调模型,该模型能够更好地利用每个方向上的绿灯时间,适应于存在转向的路径协调控制中,根据模型思路,绘制模型时距图如图3 所示,同时在2.1 和2.2 节中,加入路口转向及速度引导的约束,使模型进一步完善。

图3 不对称绿波带宽模型时距图Fig. 3 Time distance diagram of asymmetric green wave bandwidth model
图3 中,Si(Si+1) 表示交叉口编号;bi() 表示上行(下行) 方向,相邻交叉口间绿波带带宽度;()表示上行(下行) 方向,带宽中心线左侧带宽宽度;() 表示上行(下行) 方向,带宽中心线右侧带宽宽度;ri()表示交叉口Si处,驶离(驶入)交叉口方向的红灯时长;wi() 表示冲突变量,定义为红灯开始(结束) 时间与绿波带中心线的时间长度;τi() 表示下游交叉口车辆排队消散时间;Δi() 表示红灯偏移量,定义为同交叉口,驶出和驶离交叉口方向红灯中点时刻的差值;ti() 表示上行(下行) 方向从当前交叉口驶离到达下游交叉口的行程时间;ϕi() 表示相位差,定义为相邻交叉口同相位红灯中点时刻的差值。
2.1 路口转向系数约束
路径不同于干线的主要原因是存在车辆的转向行为,因此,在协调控制时需要对模型进行改进,通过添加一个0-1 变量-左转弯系数δi(ˉδi) 对转向行为进行表示(右转行为做不受控考虑),其含义分别表示上行和下行方向的车流左转影响值。
现阶段,设立左转专用相位的相位模式主要有以下4 种,如图4 所示,其对应左转弯系数取值见表1。

表1 不同相位模式下左转弯系数取值Tab. 1 Value of left turn coefficient under different phase modes
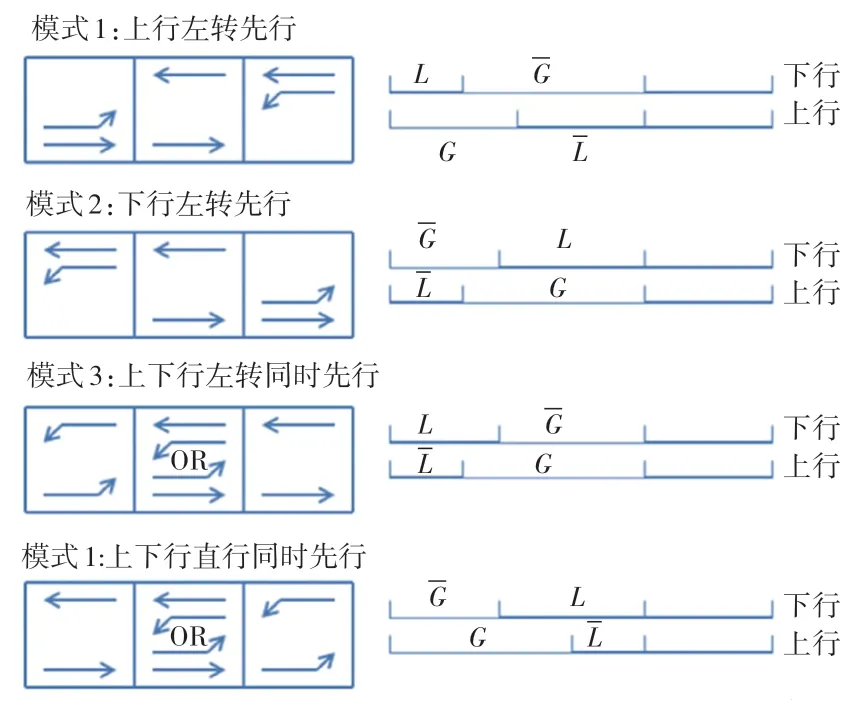
图4 4 种涉及左转专用相位的方案Fig. 4 Four schemes involving left turn dedicated phase
因此,可用Δi表示为同一交叉口,不同方向左转相位时长修正差值,其表达式为:
可得到模型关于冲突变量与左转弯系数的约束条件:
其中,Li() 表示驶入(驶离)交叉口方向左转相位的绿灯时间。
2.2 考虑速度引导控制约束的路径信号协调控制模型
通过基本的不对称绿波带宽模型,加入路径转向、速度引导条件后得到路径信号协调控制模型如下:
其中,z为周期频率,定义为公共周期的倒数;C1为最小周期(s);C2为最大周期(s);ki为上行和下行带宽的需求比;ai() 为上行(下行)方向路段饱和度;di() 为上行(下行)方向相邻交叉口间距(m);fi() 为上行(下行) 方向路段速度上限(km/h);ei() 为上行(下行)方向路段速度下限(km/h);vg() 为上行(下行)方向路段减速引导车速(km/h);vg′() 为上行(下行)方向路段加速引导车速(km/h);hi() 为上行(下行)方向路段速度波动上限值(km/h);gi() 为上行(下行)方向路段速度波动下限值(km/h)。
该模型可输出3 个重要指标,是后续仿真验证及评价的重要依据,分别是公共周期、相位差和冲突变量。
3 案例分析与验证
3.1 模型求解
为了验证论文模型的可行性,案例选取了江苏省苏州市工业园区的某一区域路网内主要通勤路径,进行模型编程求解及仿真数据分析,具体步骤如图5 所示。

图5 案例分析与验证流程Fig. 5 Case analysis and verification process
研究路径由6 个交叉口组成,用S1至S6表示,其相邻路段用L1至L5表示,东西向为独墅湖大道和金鸡湖大道两条主干道,南北向为星塘街。 考虑到该路径内主要为上下班通勤者,且晚高峰时车流量更大,交叉口存在车辆排队的情况,取工作日晚高峰期间对案例地点进行了调查研究,得到各个交叉口的高峰小时流量和信号配时方案。
根据关联度界定,将交叉口S1至S4划分为第一子区,交叉口S5和S6划分为第二子区,并对衔接路段(金鸡湖大道星塘街至莲葑路段) 进行速度引导,得到车辆最终通过减速引导的平均车速约为50 km/h,最终到达并通过下游交叉口的车速约为20 km/h。
根据第2 节中提出路径信号协调控制模型,对各个子区进行研究,并输入路段引导速度。 利用Lingo 线性规划求解编程软件进行编程求解,得到路径交叉口的公共周期为112 s,并得到路段带宽、交叉口冲突变量和相位差。
3.2 仿真分析
在Synchro 软件中建立路径模型,输入流量和配时等数据,并将模型所得的公共周期、相位差及路段引导速度等条件输入,通过仿真将输出结果进行对比分析。 仿真结果如图6 所示。

图6 路径在Synchro 中的仿真Fig. 6 Simulation of the route in Synchro
为了证明本文协调方案的可行性,利用Synchro信号配时优化功能,对现状路径进行吸信号配时优化并仿真输出结果,接着将本文协调方案与Synchro 优化方案及路径现状方案三者进行数据对比分析,其绿波带宽、延误及停车次数等评价指标见表2、表3。

表2 双向绿波带宽对比Tab. 2 Comparison of green wave bandwidth of road section s
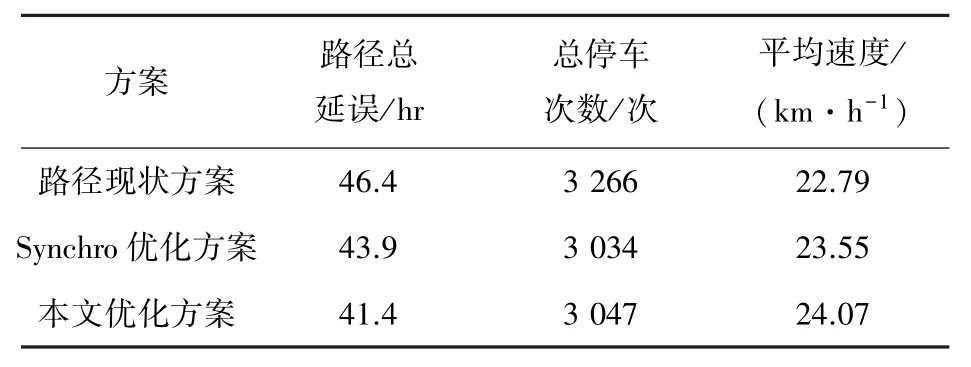
表3 主要评价指标对比Tab. 3 Comparison of main indicators
对比分析可得,由于上行带宽的需求比高于下行带宽,Synchro 在优化时,保证了上行方向的绿波带宽,因此在路段L2和L3处放弃了下行方向的绿波带宽。 而本文的模型虽然在部分路段绿波带宽的宽度窄于Synchro 优化方案,但是考虑双向车流,绿波带更连续。
相比于路径现状方案,本文模型所得到的路径总延误降低了10.8%,路径总停车次数减少219 次,占6.7%,车辆平均速度提升了5.6%;相比于Synchro 优化方案,路径总延误降低了5.6%,路径总停车次数相差较小,车辆平均速度提升了2.2%。
4 结束语
案例分析表明,本文提出的考虑速度引导的城市路径协调控制模型可以运用于实际路网中,通过速度引导策略对协调子区衔接路段进行控制亦有研究意义。 有助于有针对性地制定相关交通管制,也为日常通勤主路径的信号控制研究提供参考依据。需要提出的是,本文在速度引导控制时,需要给定相邻交叉口的具体信号配时及连接路段长度,因此,主要针对有固定配时方案控制的信号交叉口,对于自适应控制交叉口的适用性还有待深入探讨与研究,这些将在后续的研究工作中进一步完善。
猜你喜欢
东坡赤壁诗词(2019年5期)2019-11-14
自动化学报(2017年4期)2017-06-15
重庆交通大学学报(自然科学版)(2017年3期)2017-05-17
中国房地产业(2016年2期)2016-03-01
系统工程学报(2015年3期)2015-02-28
电网与清洁能源(2015年2期)2015-02-28
电测与仪表(2014年22期)2014-04-04
河南科技(2014年14期)2014-02-27
吉林大学学报(工学版)(2013年1期)2013-08-16
电力工程技术(2012年5期)2012-03-25
