
继电保护户外柜机械安全联锁控制方法
2023-08-24 03:47赵通汉
自动化与仪表 2023年8期
付 强,赵通汉
(国网固原供电公司,固原 756000)
继电保护户外柜在继电保护中是一个重要的设备,其运行过程中会不断产生继电保护信号[1]。目前,由于不同厂家的继电保护装置之间性能差异较大,很难做到在不同厂家产品之间互为备用,因此对继电保护户外柜的联锁控制成为一个重要课题[2-3]。通过不同厂家系统间的联锁控制,有效地解决继电保护设备和户外柜的联锁控制问题。
文献[4]以两种常见的冗余结构计算机联锁系统为研究对象,建立计算机联锁系统的风险失败概率和动态故障树模型。由于概率逼近法与马尔科夫法的结果近似,利用概率逼近法求解相应的风险失败概率和动态故障树模型。通过对比两种冗余结构的计算机联锁系统,得出两种不同类型的计算机联锁系统在全故障状态下的安全性能;文献[5]提出了一种利用DNN 和CVM 技术的继电保护设备状态监测控制方法。采用变焦相机对变电站的实时影像进行降噪,然后根据相关度对其进行匹配。基于尺度不变特征转换的方法,利用DNN 对图像进行分类,并对设备的状态进行识别。在此基础上,给出了一种改进的方法,使该方法能够在各种光照情况下保持较好的鲁棒性。经过实践证明,该方法的识别精度在99%以上,使变电站的安全性能得到了极大的提高。
基于以上研究背景,本文针对继电保护户外柜的机械安全联锁设计一种控制方法,以保证继电保护户外柜的安全性。
1 机械安全联锁控制方法设计
1.1 搜索机械安全联锁进路
为了确保机械安全联锁进路的搜索结果最优,本文利用蚁群算法对机械安全联锁进路进行寻优[6],在搜索初始时刻,将每一个户外柜之间的信息素浓度设为常数,蚂蚁φ 在进路搜索过程中,在T 时刻根据路径上的信息素浓度χij(T),确定机械安全联锁进路搜索方向。(T)代表蚂蚁φ 在T 时刻从户外柜i 选择到j 的概率,计算公式为
式中:allowedφ代表蚂蚁φ 接下来到达的户外柜集合;a 代表机械安全联锁进路搜索路径上的信息素浓度对搜索路径选择的影响力;γij代表蚂蚁φ 从户外柜i 转移到j 的期望程度;b 代表γij对搜索路径选择的重要性。
蚂蚁φ 选择下一个户外柜的概率全部依赖于搜索路径上的信息素浓度,经过m 个时刻之后,蚂蚁可以遍历所有继电保护户外柜,完成一次搜索。每一只蚂蚁搜索的路径都是一个可行解[7],此时利用式(2)对机械安全联锁进路搜索路径上的信息素进行更新,即:
式中:ξ 代表信息素的残留因子。随着搜索的进行,搜索路径上的信息素会逐渐减少,利用1-ξ 表示信息素的衰减程度[8],那么利用式(3)可以计算出搜索路径的信息素增量:
根据上述蚂蚁寻优过程,对机械安全联锁进路搜索算法进行改进设计,将加入信号设备与户外柜的二维坐标作对比,如果搜索到信号设备超出了户外柜安全联锁信号范围,停止本次搜索,提高搜索效率;如果搜索到防护冲撞的道岔,需要根据蚂蚁寻优策略,沿着道岔的反方向搜索。
先确定机械安全联锁进路初始端口的信号机坐标和终端信号机坐标,表示为(xc,yc)和(xr,yr),判断2 个信号机的相对位置,如果xc<xr,则向右搜索机械安全联锁进路,否则向左搜索机械安全联锁进路。
接着由初始端口的信号机向前搜索信号设备Sp,通过信号设备Sp与始端信号机和终端信号机的坐标对比,判断信号设备Sp是否处于机械安全联锁进路搜索范围内,如果搜索范围内不存在信号设备Sp,则判定始端信号机和终端信号机之间不存在有效的机械安全联锁进路,并终止搜索。如果搜索范围内存在信号设备Sp,存在以下3 种情况,即:
(1)如果信号设备Sp是对立道岔并且是户外柜进口的防护冲撞道岔,信号设备Sp定位通往安全线,将信号设备Sp保存并沿着道岔反方向搜索;
(2)如果信号设备Sp是对立道岔并且不是户外柜进口的防护冲撞道岔,获取信号设备Sp的岔后定位坐标(xn,yn)和反位坐标(xf,yf),计算出2 个坐标与终端信号机的纵坐标绝对差,记为时,保存信号设备Sp并继续搜索;
根据以上过程,利用蚁群算法搜索得到机械安全联锁进路。
1.2 机械安全联锁状态监测
搜索到机械安全联锁进路之后,需要监测机械安全联锁状态,构建机械安全联锁的状态方程,表示为
式中:ϑT代表机械安全联锁状态信息的提取方程;Λ代表机械安全联锁状态的分类属性;∂i代表联锁控制信号的瞬时幅度;l 代表机械安全联锁状态的特征;δ 代表控制数据的训练集合。
利用机械安全联锁的状态方程,构建机械安全联锁装置的控制信号模型,表示为
式中:σ(εi)代表机械安全联锁控制数据的采样时刻。
控制信号模型可以对机械安全联锁的状态特征进行时间序列采样,通过更新采样时间,得到机械安全联锁状态的频谱信息,结合时频分析,估计出机械安全联锁状态的瞬时频率,给出机械安全联锁状态的概率密度函数:
式中:fi代表机械安全联锁状态的瞬时频率。
机械安全联锁状态数据集是由ζ 个状态数据样本构成的集合,利用式(7)对机械安全联锁状态数据集进行后验概率估计,即:
式中:Uj(k)代表机械安全联锁状态的联合概率密度函数。
为了实时监测机械安全联锁状态,引入时频分析法,构建机械安全联锁状态监测函数,即:
式中:xi代表机械安全联锁状态矢量;ui代表机械安全联锁状态的特征提取结果。
利用机械安全联锁的状态方程,构建机械安全联锁装置的控制信号模型,根据机械安全联锁状态的概率密度函数,对机械安全联锁状态数据集进行后验概率估计,获取机械安全联锁状态,为机械安全联锁控制提供数据支持。
1.3 设计机械安全联锁控制程序
在机械安全联锁控制程序中,以机械安全联锁状态为依据,先建立机械安全联锁控制的数学表达式:
式中:ψp代表联锁控制的比例增益;r(t)代表机械安全联锁控制中输入与输出的差值;td代表时间常数的微分值;t*代表时间常数的积分值。
通常情况下,可以采用无刷直流电机实现继电保护户外柜的机械安全联锁控制,此时电机运动方程为
式中:ω 代表电机的转速;Lz代表无刷直流电机的电磁转矩;Lf代表电机的负载转矩;ζ 代表阻尼系数;G代表电机的转动惯量。
在机械安全联锁控制程序设计中,利用STEP9软件编写电机运动的控制程序,从而对继电保护户外柜进行机械安全联锁控制。在此基础上,利用STEP9 软件编写联锁控制程序。通过将组态硬件和编辑软件的结合,创建一个机械安全联锁的自动化控制方案。利用STEP9 软件组建机械安全联锁的自动化控制方案,是以对象的形式储存控制方案所需的硬件组态数据,并通过PLC 控制程序和网络通讯的组态参数,建立机械安全联锁自动化控制方案,具体流程如图1 所示。
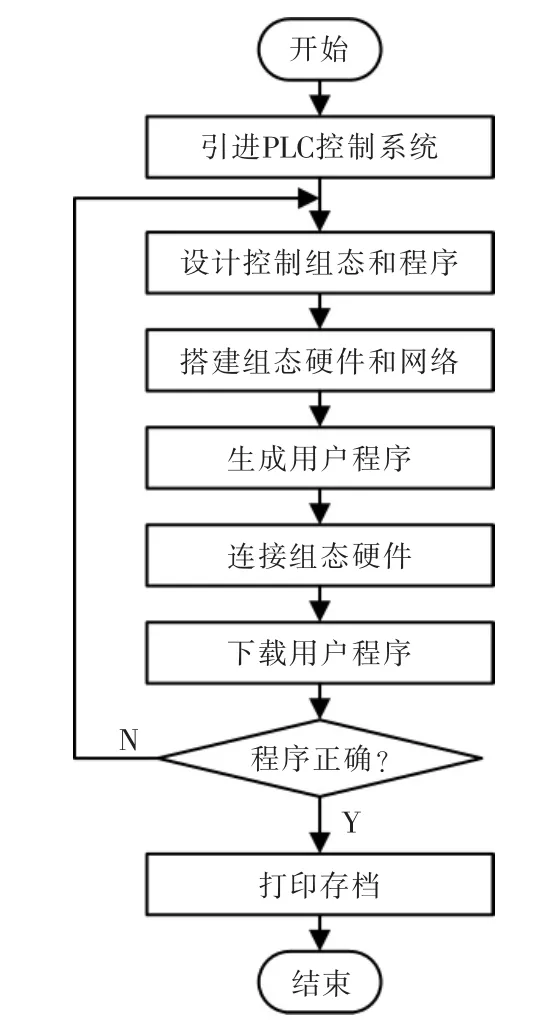
图1 机械安全联锁自动化控制方案的创建流程Fig.1 Flow chart for creating an automation control scheme for mechanical safety interlocking
选用梯形逻辑语言进行机械安全联锁控制逻辑软件的编写,梯形图语言与传统的继电器联锁的电路形式非常相似,非常适用于编写机械安全联锁控制逻辑软件。为了将编写完成的机械安全联锁控制程序下载到PLC 中,或者将PLC 程序安装在计算机的终端,在PLC 程序与计算机终端建立网络通信连接,利用网络通信适配器与PLC 程序的MPI 连接,实现机械安全联锁控制程序与计算机终端的通信,由此实现继电保护户外柜机械安全联锁控制。
2 实验分析
2.1 搭建实验平台
为了验证继电保护户外柜机械安全联锁控制的性能,将上位机系统与户外柜机械安全联锁装置相结合,搭建的实验平台如图2 所示。
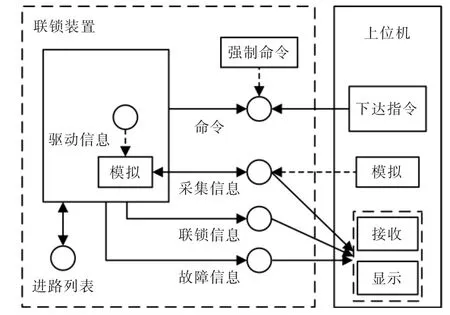
图2 实验平台Fig.2 Experimental platform
在进路的实验与模拟中,先由上位机发出设定进路的指令,再通过上位机的CRT 接口观察进路的运行,利用机械安全联锁装置的模拟模块,进路将进入开启信号和列车压入检测,如果进路没有进入这一阶段,那么有可能是上位机发送的指令错误,或者在联锁操作中出现错误。当进路进入开启信号和压入检查阶段之后,利用计算机模拟模块,对进路、故障闭合情况、列车压入后的正常开锁情况进行检测。
在继电保护户外柜机械安全联锁控制中,当2台CPU 的计算结果不一致且可以检测出某个特定的单元发生故障时,可以进行转换,否则将会关闭联锁装置的输出。在上述情况下,可以确定联锁装置的4 种状态,分别为:
状态0:两个单元都是正常的;
状态1:联锁装置运行状态下降;
状态2:联锁装置失效-安全状况;
状态3:联锁装置处于危险状态。
将继电保护户外柜机械安全联锁装置的失效率设置为μ,那么联锁装置4 种状态之间的转移关系如图3 所示。
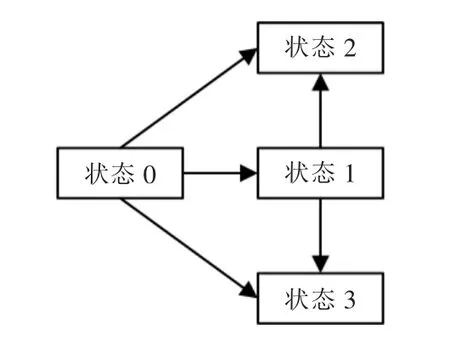
图3 联锁装置4 种状态之间的转移关系Fig.3 Transfer relationship between the four states of interlocking devices
2.2 联锁装置的安全可靠性分析
根据联锁装置4 种状态之间的转移关系,计算联锁装置的可靠度和不安全度,结果如图4 所示。
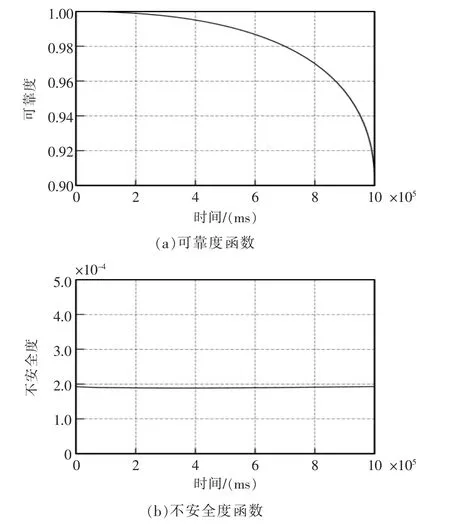
图4 联锁装置的安全可靠性结果Fig.4 Safety and reliability results of interlocking devices
图4 的结果显示,联锁装置可靠度函数可以反映出联锁控制的可靠度在90%以上,符合继电保护户外柜机械安全联锁控制中的可靠性要求;不安全度函数可以反映出联锁控制的不安全度低于0.002%,同样符合继电保护户外柜机械安全联锁控制中的安全性要求。
2.3 性能对比
为了突出文中方法的控制性能,引入基于动态故障树的控制方法和基于深度神经网络的控制方法作对比,在不同的道岔转换时间下,测试户外柜的使用效率,结果如图5 所示。
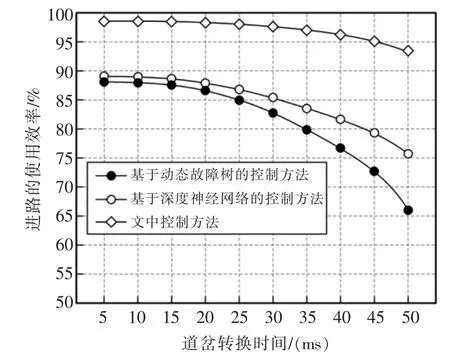
图5 户外柜的使用效率Fig.5 Usage efficiency of outdoor cabinets
从图5 的结果可以看出,随着道岔转换时间的延长,户外柜的使用效率逐渐下降,采用基于动态故障树的控制方法和基于深度神经网络的控制方法时,户外柜使用效率下降幅度较大,说明动态故障树和深度神经网络对继电保护户外柜机械安全联锁的控制效果较差。但是采用文中方法时,虽然户外柜使用效率逐渐下降,但是仍然可以控制在93%以上,说明文中方法对进路的搜索,可以提高户外柜的使用效率,具有更好的控制效果。
3 结语
本文提出了继电保护户外柜机械安全联锁控制方法研究,经过实验测试发现,该方法在机械安全联锁控制中具有更好的效果。但是本文的研究还存在很多不足,在今后的研究中,希望可以针对机械安全联锁的发展趋势,研究联锁条件下的带动道岔问题,提升户外柜的工作效率。
猜你喜欢
铁道通信信号(2020年11期)2020-02-07
铁道通信信号(2020年10期)2020-02-07
铁道通信信号(2019年4期)2019-10-10
铁道通信信号(2019年3期)2019-04-25
铁道通信信号(2018年10期)2018-12-06
经济技术协作信息(2018年32期)2018-11-30
电子制作(2016年19期)2016-08-24
铁道通信信号(2016年5期)2016-06-01
电子制作(2016年23期)2016-05-17
凿岩机械气动工具(2014年3期)2014-03-01
