
无人机实验仿真教学平台设计与应用
2023-08-22 07:47汪玉美刘楠楠冯娟娟姚寒瑜
实验室研究与探索 2023年5期
汪玉美,刘楠楠,冯娟娟,姚寒瑜
(陆军炮兵防空兵学院无人机应用系,合肥 230031)
0 引 言
无人机在信息化、无人化战争中发挥了重要的作用,从保障力量跃升为主战力量。深入研究无人机运用方式并及时将研究成果融入无人机专业教学已迫在眉睫。
实验仿真已经成为“兵力与经费的倍增器”[1],从外军典型无人机战例来看,无人机研究领域的基本特征之一就是不断地创新与发展,传统的战例分析、实兵推演等形式难以满足教学研究需求[2-3]。无人机实验仿真拓展性强,其可设计、可编辑、可复盘的特点,使得相关研究能够灵活地根据任务需要,实时调整实验要素,较好地适应无人机研究的动态变化[4-5]。
将无人机实验仿真引入教学,构建教学平台,模拟复杂环境,分析方案规划,对提高未来指挥员在无人机筹划能力方面具有重要作用[6-7]。基于此,本文设计了无人机实验仿真教学平台,为学员提供软件仿真环境,提升学员解决无人机相关问题的能力,培养无人机应用的创新意识。
1 无人机实验仿真教学平台总体结构
无人机实验仿真教学平台基于计算机网络,采用分布式技术[8-9],使平台各组成部分有序连接,通过模块间的数据交互,客观形象地构建出无人机方案推演过程,帮助学员演示、设计、分析、创新无人机任务规划[10-11]。该教学平台总体结构如图1 所示。

图1 无人机实验仿真教学平台总体结构
在无人机实验仿真教学平台中,分布式仿真引擎采用组件化建模与离散事件仿真技术,采用时间和离散事件混合推进方式,对仿真事件进行周期性和非周期性的调度,负责服务接口、模型接口、事件管理器、时间管理器和仿真想定加载器的创建和维护;模型开发主要用于设计、生成仿真组件模型和实体模型,通过图形化建模方式,添加属性、方法和需要处理的消息,生成模型代码;模型装配主要基于组件化建模思想,根据建模对象的实际性能,完成组件模型的参数设置,再“组装”这些组件生成可部署的实体模型;想定编辑主要用于创建和管理仿真想定,完成环境和实体地部署;想定运行解析想定编辑中设定的流程,由分布式仿真引擎执行,可对单线程运行、指定随机数种子、人在回路、运行完毕后自动回放等进行选配;数据分发服务主要完成分布式数据中继、提供统一仿真时间、管理联邦和联邦内的成员;二维、三维态势主要对态势进行形象直观展示和控制;效能分析评估主要根据推送的仿真结果数据对无人机完成任务的效能或是规划方案进行分析评估。
2 无人机实验仿真教学平台设计
2.1 分布式仿真引擎设计
分布式仿真引擎主要由时间管理器、事件管理器和其他接口服务组成。引擎运行时,事件管理器执行仿真模型提交的事件,时间管理器负责裁决事件管理器提交事件的时间有效性,并批准符合执行条件的事件执行,随着仿真事件的不断执行,推动仿真时间前进,直至结束。其他接口服务主要为模型和数据提供支撑,包括对象管理、服务管理、环境管理、数据采集、结果裁决和地形服务等。分布式仿真引擎总体设计如图2 所示。时间管理器、事件管理器和仿真模型三者之间的交互关系如图3 所示。

图2 分布式仿真引擎总体设计

图3 时间管理器、事件管理器和仿真模型交互关系
仿真引擎包含多个事件管理器,每个事件管理器维护一个独立的事件队列,队列中可存在多个仿真实体和组件模型提交的事件。时间管理器扮演仲裁者的角色,负责协调多个事件队列的事件同步,待执行事件都必须向时间管理器提交执行请求,根据时间、优先级决定是否能执行。若多个事件的时间、优先级一样时,通过队列的并发设计,使多个事件同时执行以提高仿真运行效率。
2.2 模型开发模块设计
模型开发模块主要由模型视图设计、组件/实体建模和代码生成组成。模型视图设计主要以图标的形式管理组件和实体模型提供编辑和排列的功能,如图4所示。组件/实体建模主要是以图形化方式建模,通过选择继承的父类,添加属性、方法、接口以及能处理的消息、态势、指令进行建模,如图5 所示。实体模型能对消息和态势进行处理,组件模型仅对指令进行处理,定义消息如图6 所示,态势与指令的定义与消息类似。代码生成主要是为建模内容创建VC开发环境下的模型项目,并生成C++代码,生成动态链接库文件应用到模型装配模块(见2.3)。

图4 模型视图设计
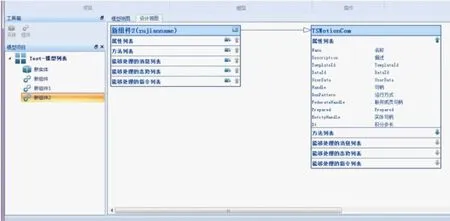
图5 组件/实体建模

图6 自定义消息
2.3 模型装配模块设计
模型装配模块主要由组件模型实例化和实体模型组装组成。模型实例化主要完成组件模型的型号化,根据建模对象的实际性能,通过输入具体的参数进行配置,生成型号化组件。实体模型组装仍按建模对象的真实构成,选择相对应的组件模型实例进行组装,构成能在想定编辑模块(见2.4)中部署的实体模型,如图7 所示。
2.4 想定编辑模块设计
想定编辑模块主要由想定管理、实体资源管理组成。想定管理用于创建、加载和维护仿真想定,提高想定编辑效率,以便快速形成仿真想定。实体资源管理主要为想定编辑人员提供可视化的部署环境,对部署实体和资源的基本信息和相互关系等信息进行管理维护,是想定编辑模块的核心,如图8 所示。

图8 想定编辑主界面
2.5 态势显示模块设计
态势显示模块主要由二维态势和三维态势组成。二维态势是对推演态势进行二维展示,根据关注的时间或地点控制态势的进展,如图9 所示。三维态势是对仿真过程的三维呈现,仿真更贴近现实,观察人员能更直观、友好地观察总体形势,如图10 所示。

图9 二维态势显示
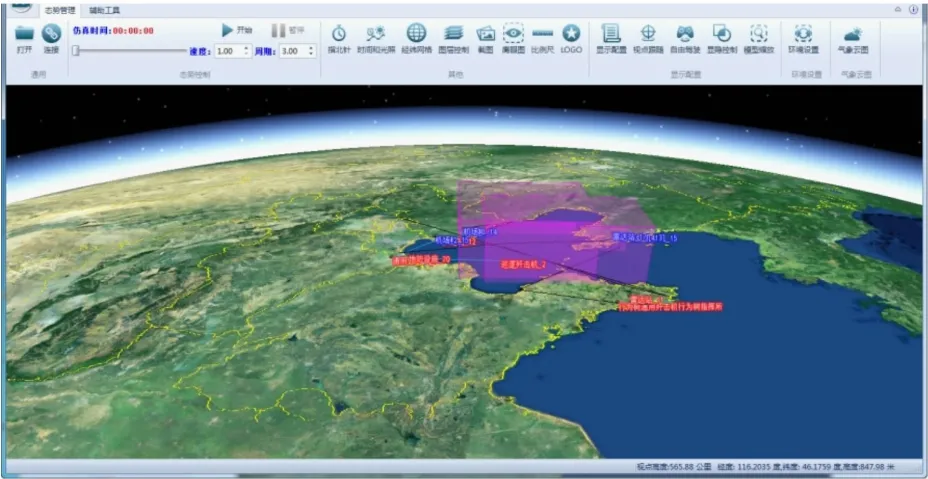
图10 三维态势显示
2.6 数据分发模块设计
数据分发模块主要由数据中继和时间协调服务模块组成。数据中继是想定运行、仿真引擎、态势显示以及效能评估数据之间交互的中转枢纽,如图11 所示。时间协调主要负责控制、协调统一模块之间仿真时间的同步,如图12 所示。

图11 数据中继服务

图12 时间协调服务
2.7 效能分析评估模块设计
效能分析评估模块主要由数据抽取、统计分析、报表生成等部分组成,对仿真运行结果数据进行分析评估,支持评估指标的自定义动态构建,如图13 所示。数据抽取是按一定标准格式从想定运行数据中抽取需要参与评估的数据,统计分析是根据评估算子对抽取的数据进行各类计算,计算结果交报表生产单元进行多样化展示[11-12]。
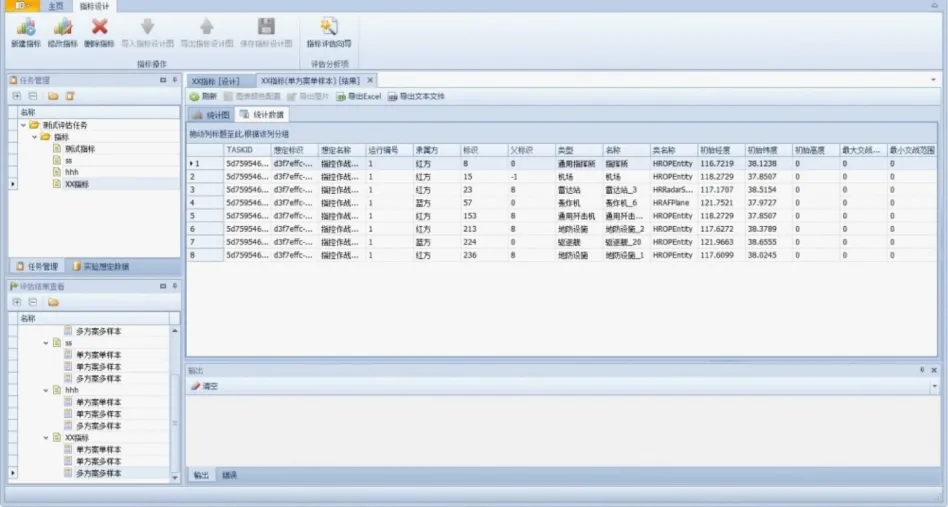
图13 效能分析评估
3 无人机实验仿真教学平台应用
以基于贪心算法的无人机航迹规划为例,说明该实验仿真平台在实际教学中的应用[12-15]。
3.1 基于贪心算法的无人机航迹规划实验设计
3.1.1 侦察目标任务
结合具体问题展开无人机仿真教学,设某无人机部队配属4 个无人机基地,分别是P01、P02、P03、P04,每个基地装备2 架某型无人机,对10 个目标群共68个目标进行侦察,每个目标群均配属雷达,且开机对空警戒,其坐标信息见表1。设定的侦察目标任务:为FY型无人机完成10 个目标群的侦察任务拟制最佳航迹路线和无人机调度策略,以保证侦察无人机滞留雷达有效探测范围内的时间总和最短。
3.1.2 约束和假设条件
结合具体目标任务,给出约束条件:
(1)无人机巡航飞行速度为180 km/h,巡航飞行高度为3 km。
(2)无人机只携带光电载荷,对地有效探测范围半径为10 km。
(3)无人机对每个目标群的各目标至少侦察一次。
(4)执行完任务后无人机需返回原基地。
(5)目标群配属的雷达对无人机的有效探测距离为50 km。
为简化问题,给出3 个假设条件:
(1)无人机匀速飞行。
(2)所有的目标优先级相同。
(3)无人机经过目标,即被发现。
有了以上条件,目标任务就可以等价为:“无人机在雷达探测范围内的路径总和最短”,这就将问题转化为利用贪心算法求解旅行商问题。
3.1.3 设计侦察策略
从10 个目标群68 个目标的位置分布,可发现目标群内的目标分布的较为密集,目标群之间分布较为松散,这样可将航迹规划划分为2 个层次来解决。第1 层次,在保证探测到其内部每一个目标的前提下,求解出目标群内的最短路径;第2 层次,宏观上将每个目标群视为1 个节点(以雷达站坐标为参考坐标),在10个目标群总寻求一条最短路径。将群间、群内的最短路路径全局优化,结合各无人机基地的具体坐标信息,确定无人机的分配和每架无人机的航迹规划。
3.2 基于贪心算法的无人机航迹规划实验实施
3.2.1 贪心算法计算最短路径
利用模型开发模块的框架,编程实现贪心算法的基本思想,通过分层次输入各目标群或目标的坐标信息,计算出若干条满足条件的最短路径,结合各无人机基地的位置信息,利用贪心算法局部寻优原则,确定无人机的分配,得出一条基于贪心算法的航迹规划,即一系列航迹点的坐标。
3.2.2 仿真平台分析航迹规划
利用模型装配模块将涉及目标、雷达、无人机等实体进行组装,利用想定编辑模块部署4 个无人机基地、8 架无人机、10 个雷达站和68 个目标等实体,为调度的2 架无人机设定具体巡航点,具体坐标依据贪心算法程序计算得出的航迹点。尔后运行想定,观察推演的二维、三维态势,如图14、15 所示(黑色线为实际飞行路径,红色是规划路径),设置效能分析评估模块,统计无人机飞行距离和时间(见表2)。

表2 优化前无人机飞行距离和时间

图14 贪心算法航迹规划二维态势显示

图15 贪心算法航迹规划三维态势显示
由仿真结果可见,无人机并没有完全按照设定的航迹飞行,存在偏离,甚至在目标群内侦察时,飞行航迹略显混乱,分析其原因,主要是在规划路径时,忽略了2 个问题:一是未考虑无人机的转弯半径,二是未考虑光电载荷的有效侦察范围。
3.2.3 优化完善实现任务目标
针对仿真结果的表现,需对设计航迹进一步的优化。①对航迹进行平滑处理,这里采用绕点平滑,即不经过原规划航迹点的平滑,较适合实际飞行情况。②考虑到无人机携带的光电载荷有效侦察半径为10 km,采用三角法对目标群内的侦察序列进行优化,即依次选取A、B、C点,由3 个点构成三角形,判断B 点与点A、C 之间的距离是否在有效侦察范围内,若为真,则B 点可以从航迹点中去掉;若为假,继续往下推进一个节点,直至覆盖所有的节点,最后留下的航迹点则是最优序列。
根据优化策略修改想定,运行后其二维态势如图16 所示,克服了之前出现的问题,飞行时间和距离也较之前更短,如表3 所示。

表3 优化后无人机飞行距离和时间
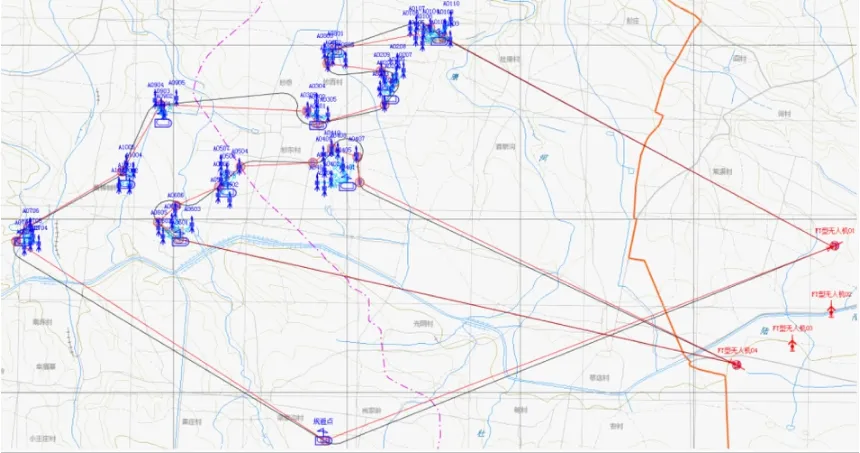
图16 优化后航迹的二维显示
4 结 语
本文针对传统分析战例、实战推演方式无法满足无人机的教学研究,设计了无人机实验仿真平台,该平台在分布式无人机作战仿真引擎的基础上,集成了模型开发、模型装配、想定编辑、数据分发、多维态势和效能评估等模块,实现了规划方案推演和实验分析功能,有效地支撑了无人机相关的教学研究活动,增强学员对无人机任务规划的兴趣,提升学员解决无人机问题的能力。
猜你喜欢
电脑爱好者(2020年10期)2020-07-28
汽车与安全(2020年1期)2020-05-14
青年歌声(2019年12期)2019-12-17
中国外汇(2019年19期)2019-11-26
中国化肥信息(2019年5期)2019-06-25
数码世界(2018年2期)2018-12-21
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2016年6期)2016-11-16
中国卫生(2015年2期)2015-11-12
舰船科学技术(2015年8期)2015-02-27
