基于静电传感器阵列和位置指纹的绳状流定位方法研究
2023-08-22 08:31杨元清胡永辉
仪表技术与传感器 2023年7期
杨元清,王 昕,吴 真,胡永辉
(1.华北电力大学控制与计算机工程学院,北京 102206;2.国家能源集团新能源技术研究院有限公司,北京 102209;3.国电建投内蒙古能源有限公司,内蒙古鄂尔多斯 017209)
0 引言
大型火力发电机组一般采用直吹式制粉系统,其中煤粉颗粒通过一次风管道由气力输送至炉膛内燃烧。在气力输送管道内,煤粉颗粒由于碰撞、摩擦而带有静电荷,其随机运动可对管道内电场造成随机扰动。基于这一现象,采用静电传感器对管道内电场的波动进行探测,可实现煤粉流速、浓度、质量流量等参数的在线测量[1-6]。虽然静电传感器在气固两相流参数测量领域的研究已有近30年的历史,然而其现场应用效果仍然难以满足工业生产对过程参数精确测量的需求。这主要有2个方面的原因:首先,气固两相流流动非常复杂,管道内颗粒的速度、浓度分布不均匀,特定条件下还会呈现出环状流、层流、核心流、绳状流等流型[7];其次,静电传感器的空间灵敏度分布不均匀[8],同样质量流量的颗粒在传感器敏感区域内空间分布不同时,在静电电极上所引起的感应电荷量不同,造成测量结果存在较大差异。绳状流是气固两相流失稳的一种极端情况[9],其流型表现为颗粒聚集为一束并在管道内剧烈摆动,致使静电传感器信号快速、大幅度波动,从而使得煤粉质量流量的测量极具挑战。
为了提高静电传感器的测量精度,有学者提出对静电传感器的空间灵敏度进行均匀化,以使带电量相同、空间位置不同的颗粒在电极上所引起的感应电荷量趋于一致,从而降低流型对质量流量测量结果的影响。文献[10]采用绳状流研究了径向位置对圆环形静电传感器信号功率谱密度的影响,提出对信号频谱中的不同频率成分进行重新加权来改善空间灵敏度,该方法无需改变传感器结构即可达到空间灵敏度均匀化的效果。文献[11]提出了一种基于差分测量的空间灵敏度均匀化方法,在流动方向放置2个不同宽度的条形电极,将2个电极输出信号的差值作为测量信号,虽然该方法能够使空间灵敏度趋于均匀,但降低了空间灵敏度的数值。
针对绳状流质量流量的测量,本文提出首先采用静电传感器阵列对绳状流进行识别和定位,进而根据静电传感器信号强度和绳状流所处位置的空间灵敏度计算出绳状流带电量[12],再结合互相关运算得到的颗粒速度,实现质量流量的测量。其中,对绳状流的识别可根据静电传感器阵列信号同时大幅度波动的特点进行判别,而绳状流在管道截面内的定位较复杂,是本文研究的主要问题。
根据静电学理论,采用理论建模或数值模拟的方法可计算静电传感器阵列在气力输送管道截面内各位置的空间灵敏度,以参考位置为标签、各传感器的相对空间灵敏度为特征构建离线指纹数据库[13-17];在实时定位阶段,以传感器信号的相对强度为特征,与位置指纹数据库中的相对空间灵敏度数据进行匹配,实现对带电目标的位置估计。本文将静电传感器阵列与位置指纹法相结合,实现绳状流在气力输送管道截面内的定位,有利于提高质量流量测量的精度,同时该定位方法也可应用于人体[18]、飞机[19]、子弹[20]等其他带电目标的定位。
1 定位原理
1.1 静电传感器阵列结构
本文研究图1所示方形气力输送管道内绳状流的定位问题,使用嵌入在管壁的4个条形电极对管道内电场进行探测。以电极中心线所在的管道截面为研究平面XOY、管道轴线为Z轴建立图1所示坐标系。其中,条形电极尺寸(宽度×长度×厚度)为4 mm×48 mm×0.035 mm,管道内部边长为114 mm。
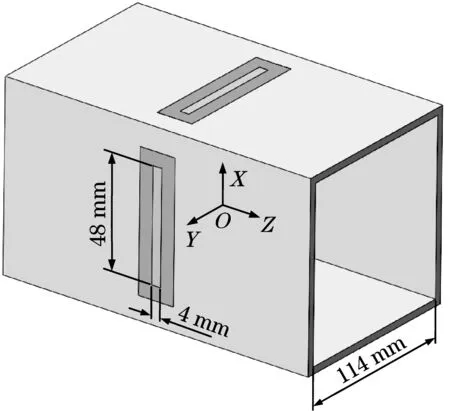
(a)静电传感器阵列三维图
1.2 空间灵敏度分布
当带电颗粒沿管道轴向运动至电极的敏感区域内时,电极附近的电场强度发生变化,引起电极上感应电荷量的变化。在静电平衡状态下,电极表面的感应电荷量q′为
(1)
式中:εr为空气介电常数;E(x,y,z)为电极表面之外附近空间的电场强度矢量;dS为面元矢量;S为电极表面积。
为表征带电颗粒所处空间位置对感应电荷量的影响程度,定义空间灵敏度为位于(x,y,z)处的点电荷所引起的感应电荷量q′(x,y,z)与点电荷带电量q之比的绝对值,即
(2)
针对图1所示静电传感器阵列,使用Si(x,y)表示第i个电极在XOY平面内的空间灵敏度。
图1中静电场具有复杂场域结构,难以获得感应电荷量的解析解,因此采用有限元法对给定边界条件下的静电场泊松方程进行求解,该边值问题可描述为
(3)
式中:φ(x,y,z)为电势;ρ(x,y,z)为空间电荷密度;Γe表示接地的电极和管壁区域。
在仿真中,以2 mm为步长分别沿X轴和Y轴移动带电量为1 μC的点电荷,求得4个电极上的感应电荷量,获得如图2所示4个电极的空间灵敏度。可以看出,空间灵敏度分布非常不均匀,电极附近的空间灵敏度显著大于其他位置的空间灵敏度。

(a)电极1
1.3 位置指纹数据库的构建
若颗粒的带电量已知,由图2所示的等灵敏度线和电极的感应电荷量可确定颗粒相对电极的位置线,3条位置线的交点即为颗粒在管道截面内的位置。然而,在气力输送管道内,颗粒的带电量受温度、湿度、粒径、材质等多因素的影响,具有随机性,无法确定上述位置线。由图2所示空间灵敏度分布特性可知,相对放置的一对电极(即电极1和电极3,电极2和电极4)的空间灵敏度沿坐标轴(即X轴、Y轴)正方向分别呈单调递增和单调递减趋势,因此可使用两电极的相对空间灵敏度在管道截面内作等值线,进而通过两电极上感应电荷量的相对大小确定颗粒相对两电极的位置线,而无需已知颗粒带电量。由2对电极可确定2条位置线,其交点即为颗粒位置。
基于上述原理,使用2个电极对的相对空间灵敏度为特征构建位置指纹数据库。相对空间灵敏度可直接定义为两电极空间灵敏度的比值,但由于空间灵敏度随着电极距离的增加而急剧降低,使得两电极空间灵敏度的比值沿坐标轴方向的变化率非常不均匀,带来显著的定位误差。考虑到对数函数为单调增函数,且对数变换能够缩减数据之间的差异,因此将相对空间灵敏度定义为两电极空间灵敏度比值的自然对数。由电极1和电极3、电极2和电极4所确定的相对空间灵敏度的表达式分别为:
(4)

(5)
图3为X轴上电极1和电极3的空间灵敏度比值以及本文所定义的相对空间灵敏度。可以看出,相对空间灵敏度为奇函数,且其数值变化比未作对数变换时更平缓。图4为相对空间灵敏度在管道截面内的数值分布。

(a)空间灵敏度比值

(a)Fx(x,y)的数值分布
1.4 支持向量回归(SVR)定位模型
位置指纹数据库由空间上离散的参考位置及相应的相对空间灵敏度构成,为了在实时定位阶段根据静电传感器信号的相对强度对颗粒位置进行最优匹配,采用SVR算法建立定位模型,实现对训练数据的非线性拟合。图5为定位模型示意图,其中有限元仿真时点电荷的位置坐标x、y为标签,各位置的相对空间灵敏度Fx(x,y)、Fy(x,y)为输入量。

图5 定位模型示意图
由于定位模型输入与输出之间具有非线性关系,选用径向基核函数(RBF)对输入进行非线性变换:
K(a,b)=e-γ‖a-b‖2
(6)
式中:a、b为核函数输入;γ为超参数。
γ决定了单一训练样本的影响范围,γ越大,单一训练样本影响范围越大。利用学习曲线调整模型参数,发现参数γ取1时模型准确率最高。该定位模型的适用性与准确性通过后续实物实验进行了验证。
2 实验结果及分析
2.1 实验装置
为了验证上述绳状流定位方法,搭建了如图6所示的实验装置。使用一段内部边长为114 mm的方形铝合金管道模拟气力输送管道,管道的上下两端有如图7所示的有孔盖板,外径为10 mm的有机玻璃管竖直穿过两盖板上的对应通孔,粉体颗粒放置于有机玻璃管顶部的漏斗中,并在重力作用下通过有机玻璃管垂直下落,从而实现对绳状流的模拟。在实验中,粉体颗粒为石英砂颗粒,颗粒的下落高度即漏斗口到电极的距离约为1.5 m。
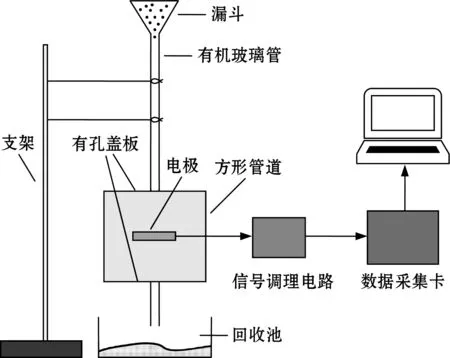
图6 重力输送实验装置示意图

图7 有孔盖板示意图
静电传感器固定于管道壁上,由印制电路板上的条形表贴焊盘作为电极,由于电极上的感应电荷量不断变化,使用跨阻放大器将电极输出的感应电荷转换为电压信号[21],之后使用二级放大器和Sallen-Key低通滤波器对信号进一步调理,其中低通滤波器的截止频率为10 kHz,最后使用USB-6366数据采集卡以50 kHz采样率将信号采集到上位机。图8为测量系统实物照片。

图8 测量系统实物照片
2.2 实验结果
利用有孔盖板对有机玻璃管位置的约束,使颗粒流依次在图7所示的7个位置经过静电传感器所在管道截面,对4路静电传感器信号进行同步采集。图9为颗粒流在位置V时的静电传感器信号。可以看出,颗粒流到电极1、2的距离比到电极3、4的距离更近,因此电极1、2的信号更强;当颗粒相对不同电极(电极1和2,以及电极3和4)的位置相同时,信号波形几乎完全相同。因此,可以验证使用静电传感器信号相对强度进行绳状流定位具有合理性。

(a)电极1
静电传感器信号强度可使用其均方根值(RMS)进行表征。虽然在构建位置指纹数据库时使用电极的感应电荷量计算空间灵敏度,但由于跨阻放大器调理输出的静电传感器信号正比于感应电荷量对时间的微分,容易证明静电传感器信号的均方根值之比等同于电极的感应电荷量之比。在进行在线定位时,使用式(7)、式(8)的计算结果作为特征值输入到SVR定位模型中进行位置估计:
(7)

(8)
式中VRMSi为第i个静电传感器信号的均方根值。
在定位实验中,取时间长度为0.2 s的信号计算其均方根值,定位结果如图10所示。可以看出,信号均方根值能够较好地反映颗粒到各电极的距离;在管道拐角附近定位误差较大,而其他位置的定位结果较准确。由于实验时石英砂颗粒在有机玻璃管内不是均匀分布,而是视给料情况随机分布,因此定位结果位于圆孔内部时可视为无误差,位于圆孔外部时认为误差为定位结果到圆孔边缘的最近距离,按此方式进行定量评估,得到拐角处的定位误差为4.11 mm。

图10 不同位置的定位结果
管道截面内不同位置的定位精度受Fx(x,y)和Fy(x,y)分布的影响。图11为Fx(x,y)沿X轴正方向的方向导数。可以看出,在管道拐角附近方向导数最小,说明此处Fx(x,y)沿X轴方向数值变化缓慢,此处对X轴坐标的分辨能力较弱,从而导致定位误差增大。后续将考虑增加传感器数量提高管道拐角处的定位能力。
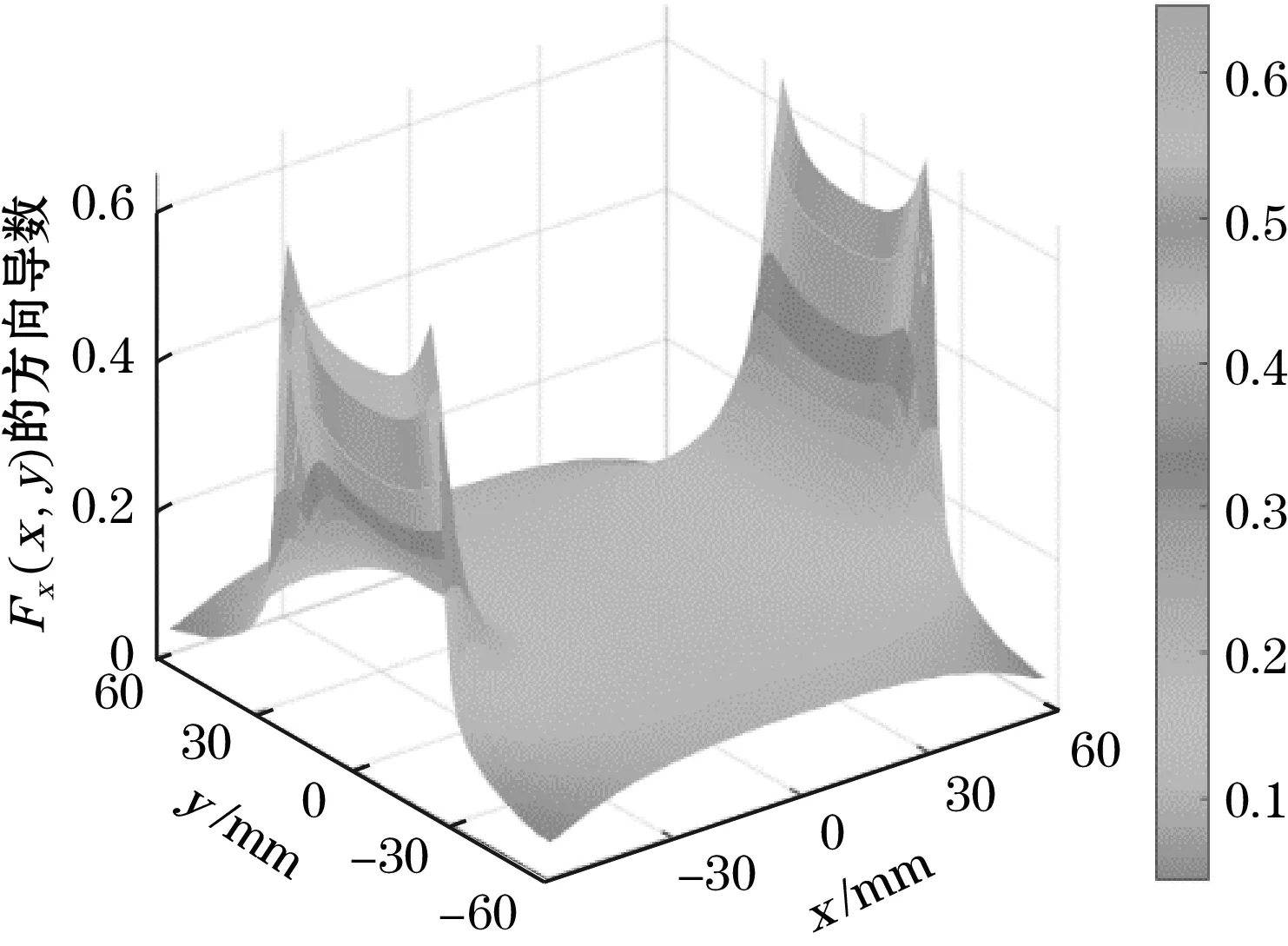
图11 Fx(x,y)沿X轴正方向的方向导数
3 结论
本文提出了基于静电传感器阵列和位置指纹的绳状流定位方法,该方法可用于消除绳状流位置变化所引起的质量流量测量误差。利用有限元仿真获得了静电传感器阵列的空间灵敏度,以电极对的相对空间灵敏度为特征、位置坐标为标签构建了位置指纹数据库,并训练SVR定位模型。在实验中,以静电传感器信号的相对强度为输入,对模拟的绳状流进行在线定位。实验结果表明:在管道拐角处,定位误差最大,为4.11 mm。
在将来的研究中,将增加传感器数量,以提高绳状流的定位精度,尤其是管道拐角附近的定位精度;将本文所提方法拓展至圆形管道,采用弧形电极阵列进行绳状流定位;进一步,根据绳状流所处位置的空间灵敏度和静电传感器信号强度计算绳状流的带电量,结合互相关运算得到的颗粒速度,开展绳状流质量流量测量的实验研究,并与未做定位时所获得的质量流量测量结果进行比较,对测量精度和误差进行全面分析与评估。
猜你喜欢
小哥白尼(趣味科学)(2022年2期)2022-05-25
制造技术与机床(2018年12期)2018-12-23
成都信息工程大学学报(2017年1期)2017-07-21
科学大众·小诺贝尔(2016年11期)2017-01-10
创新作文(小学版)(2016年16期)2016-11-11
中国资源综合利用(2016年4期)2016-01-22
广州大学学报(自然科学版)(2015年4期)2015-12-23
探测与控制学报(2015年4期)2015-12-15
电源技术(2015年2期)2015-08-22
发明与创新(2015年1期)2015-02-27