线激光传感器与物面间的倾角误差研究
2023-08-22 08:30王正家朱泽文杨晓龙
仪表技术与传感器 2023年7期
王正家,朱泽文,杨晓龙,雷 卓
(1.湖北工业大学机械工程学院,湖北武汉 430068;2.现代制造质量工程湖北省重点实验室,湖北武汉 430068)
0 引言
光学测量具有非接触、精度高、实时性好等优点[1-3],是精密测量领域中的研究热点。其中,激光测量技术以激光三角法为原理,测量范围大、响应速度快,在工件表面检测中得到了广泛应用[4-6]。由于工件结构、安装角度等问题,使用激光传感器对工件进行测量时,被测物面与传感器之间会产生倾斜角,从而使测量结果发生偏差。对此,许多学者针对激光倾斜误差展开了深入研究。文献[7]从光学角度研究倾斜误差产生的原因,提出了一种基于最小二乘法和函数库补偿法的倾斜误差补偿方法;文献[8]为了修正测点倾角引起的传感器测量误差,建立了倾角误差模型对数据进行实时补偿;孙彬等[9]根据激光光路的几何特性,推导了一种能够在工程中应用的可量化的倾角误差补偿模型;李冬冬等[10]针对工件存在倾斜角时激光位移传感器产生的误差,建立了0°~50°范围内的误差-倾斜角的映射关系。以上方法对点激光传感器的倾角误差有着较好的补偿效果,但并不适用于线激光传感器。
不同于点激光传感器,线激光传感器能够测量一条激光线上若干点的信息,测量效率更高,但测量精度更低且误差影响更大。刘艺等[11]对线激光传感器的测量特性进行了测试分析,得出了有效测量区域内X方向中部区域的稳定性优于边缘区域的结论;张旭等[12]针对线激光传感器与设备坐标系之间存在的安装角偏差,利用坐标系投影方法进行误差补偿,补偿后的工件尺寸测量误差在40 μm以内,但不适用于物面与传感器之间的倾角误差;梁杰等[13]针对测量装置在安装过程中出现的倾角装配误差,通过计算区域间的数据拟合线,并将其绕测量中心旋转为水平,实现了安装角倾斜校正,但同样不适用于被测物与传感器之间的倾角误差;邓世祥等[14]通过SVR建立入射倾角误差预测模型,提出了一种曲面零件入射倾角误差补偿方法,补偿后精度提高了39.86%,但预测模型训练过程较为复杂。当前针对线激光传感器的倾角误差研究主要是线激光传感器与设备之间的安装倾角误差,因此需对线激光传感器与被测物间的倾斜误差展开进一步研究。
本文针对线激光传感器与被测物面间的倾角,分析了倾角误差产生的原因,测得了XOZ平面与YOZ平面发生倾斜时的激光点云数据,并建立了误差-距离-倾斜角的映射关系,利用映射关系进行了误差补偿。结果表明:误差标定后,线激光传感器在物面发生倾斜时仍能保证其测量精度。
1 测量系统
1.1 线激光传感器
线激光传感器工作原理基于激光三角法,传感器内部由激光发射器和接收相机组成,如图1所示,激光发射器发射一道线型激光投射在被测物表面,线激光经过漫反射会传到接收相机上,根据相机中的成像位置推算出被测物表面的激光点三维坐标信息。

图1 线激光传感器原理图
1.2 物面倾角误差测量系统
基于线激光传感器的物面倾角误差测量系统如图2所示,主要由倾角调节平台和线激光传感器组成,线激光传感器发射的光线垂直射向被测工件,以工作台与激光传感器光轴交点为原点O,Z轴方向为激光光轴方向,X轴方向为垂直入射时激光线方向,Y轴垂直于XOZ平面,建立O-XYZ坐标系,倾角调节平台可控制被测工件在XOZ平面和YOZ平面内旋转。

图2 物面倾角误差测量系统
2 物面倾角误差分析
2.1 倾角误差来源
由激光三角法原理可知,物面发生倾斜时,散射光场相对于接收透镜的空间分布发生改变,使得光斑在光敏面上的光能质心的位置也发生改变[15],从而产生倾角误差。分别分析XOZ平面和YOZ平面的倾角误差并设计实验比较不同倾斜角所产生的误差。
2.1.1XOZ平面倾角误差
根据线激光传感器的测量原理,传感器每次投射的激光线可以看作是无数个点激光传感器共同产生的激光点云,除光轴上的激光点外,每个测量点相对于线激光传感器都会有一个在XOZ平面上的倾角,且越靠近边缘区域倾角越大,结论与文献[11]相符。如图3所示,当XOZ平面发生倾斜时,传感器光轴上的激光点也产生了倾角,每个点的测量值都存在倾角误差,右图为XOZ平面产生倾角前后Z值的示意图。
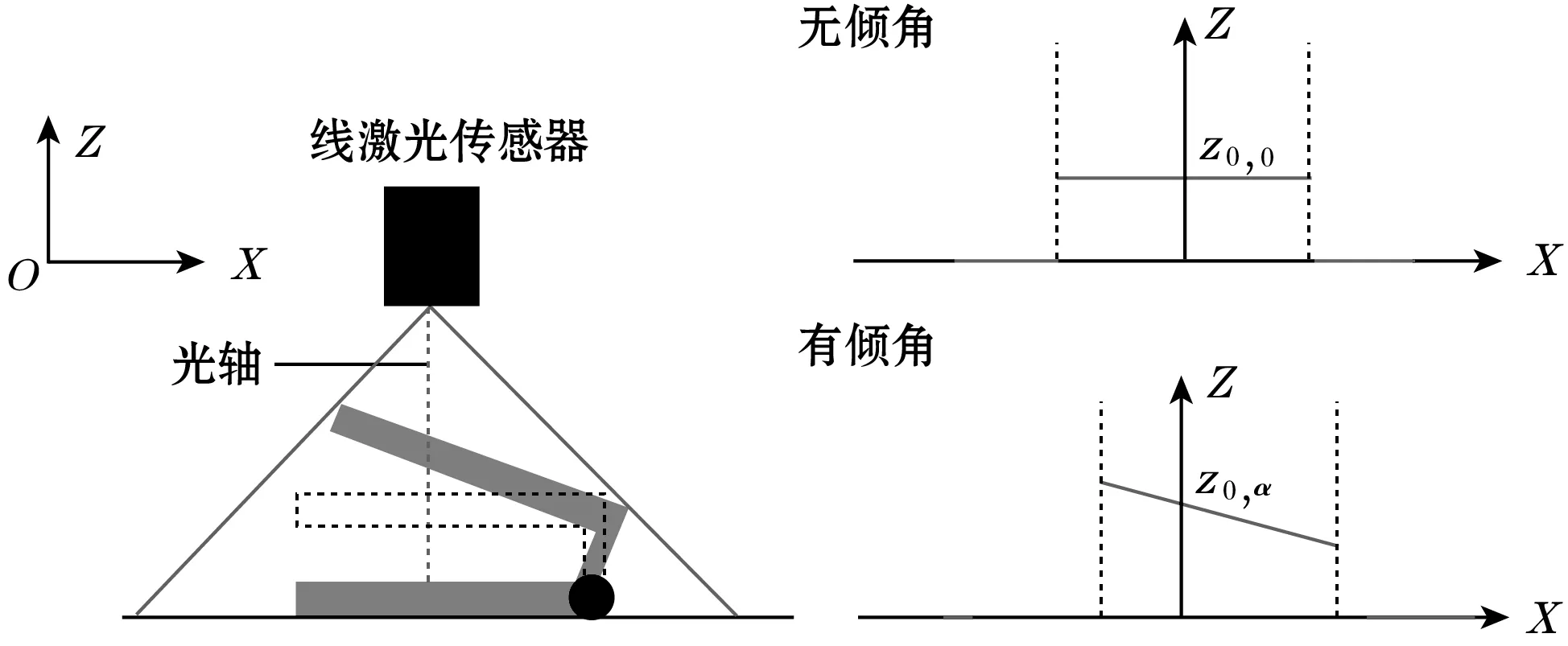
图3 XOZ平面倾角及误差示意图
2.1.2YOZ平面倾角误差
由于线激光传感器垂直入射时产生的线激光方向为X轴方向,YOZ平面可以看成是一个点激光光束,如图4所示,当YOZ平面发生倾斜时,光轴激光点Z轴存在倾角误差,右图为YOZ平面产生倾角前后Z值的示意图。

图4 YOZ平面倾角及误差示意图
2.2 倾角误差测量实验设计
为了验证XOZ平面和YOZ平面产生倾斜时的倾角误差,以图2的测量系统作为实验平台,测量不同倾斜角所产生的误差。分别针对XOZ平面和YOZ平面进行倾角误差实验。
2.2.1XOZ平面倾角误差测定实验
当激光垂直射向被测工件时,除光轴上激光点P0外,其他激光点Pi(i=…,-2,-1,1,2,…)相对于线激光传感器都会有一个XOZ平面上的倾角。如图5所示,以光轴上激光点P0的Z值作为参考,当被测距离为d时,激光点Z轴坐标为Zi,d(i=…,-2,-1,0,1,2,…),其中Z0,d为光轴上激光点的Z值,理论上其他点Z轴坐标也应为Z0,d,但由于存在倾角,Zi,d会产生误差。式(1)为激光点Pi在被测距离d下的XOZ平面的倾斜角度αi,d和Z轴误差值ΔZi,d(i=…,-2,-1,1,2,…)。

图5 XOZ平面激光线分布示意图
(1)
式中:i为距离光轴上激光点的第i个点;δx为相邻点X轴间距;H为线激光传感器安装高度。
测量完成后,重复实验改变被测距离d的值并记录,得到Z轴坐标Zi,d、倾斜角度αi,d和误差值ΔZi,d之间的映射关系。
2.2.2YOZ平面倾角误差测定实验
当线激光传感器发射的激光线垂直照射在被测工件表面时,测量数据最精确,记录此时光轴激光点的Z轴坐标信息Z0,0,控制旋转平台在YOZ平面上进行旋转,记录光轴上激光点的Z轴坐标Z0,θ,如图6所示,根据旋转平台结构和相似三角形原理可推导出旋转θ角度后Z轴坐标为Zθ,比较Zθ和Z0,θ的值即可得出线激光传感器在YOZ平面发生倾斜时的误差ΔZθ。
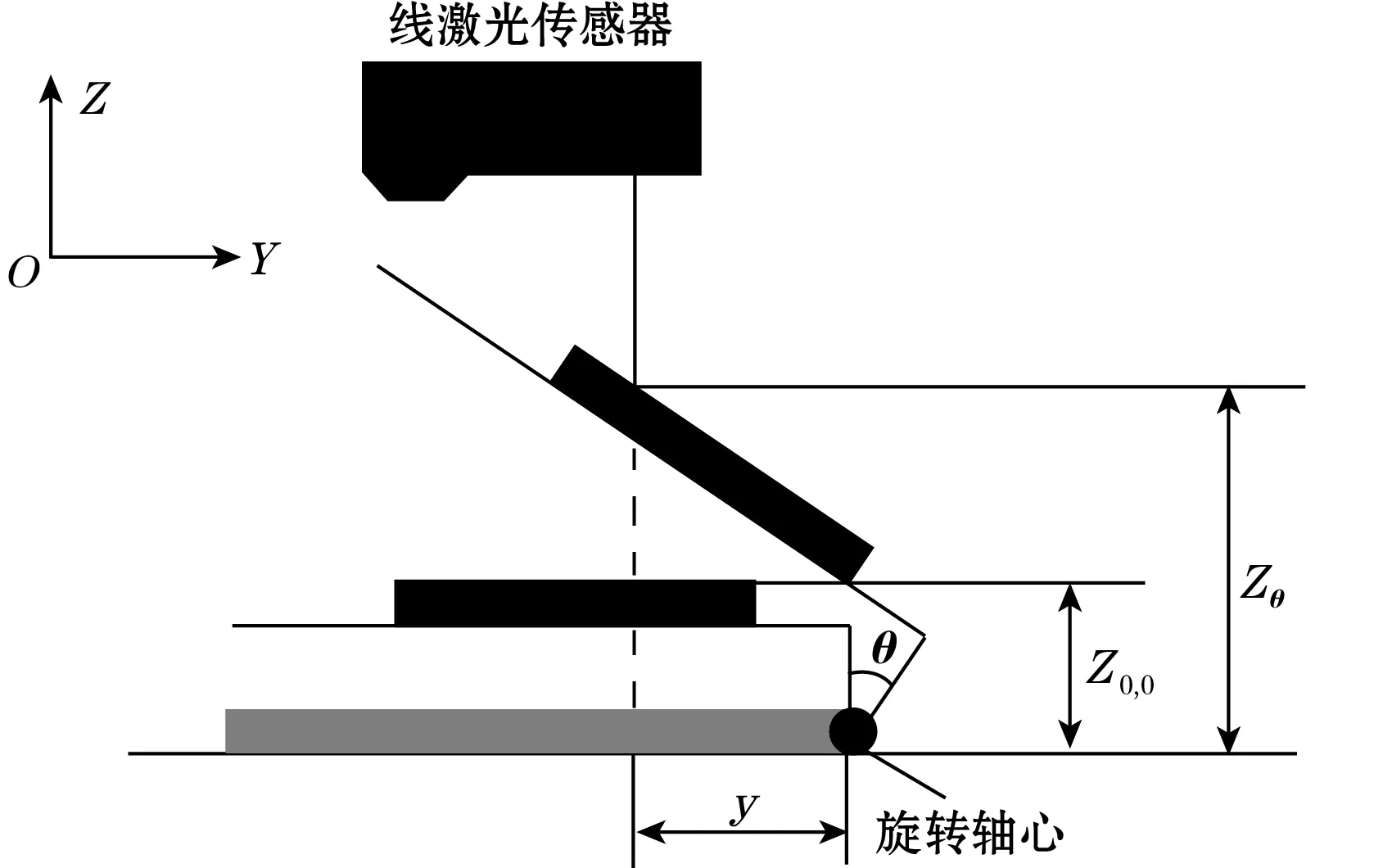
图6 YOZ平面倾角示意图

(2)
式中:θ为旋转平台在YOZ平面上旋转的角度;y为被测点与旋转轴心在Y方向上的距离。
测量完成后,改变旋转角度θ的值重复实验并继续记录,得到旋转角度θ与YOZ倾角误差值ΔZθ之间的映射关系。
3 实验结果与分析
倾角误差测量系统如图7所示,所用线激光传感器安装净距离为300 mm,测量范围为400 mm,Z方向重复精度为2 μm,Z方向线性度为0.01%,X轴最大测量宽度为365 mm,相邻点X轴间距为0.150 mm。对XOZ平面倾角误差和YOZ平面倾角误差进行测量,使用90 mm的标准量块在不同倾角下进行测试,对误差补偿前后的激光点数据进行对比分析。

图7 倾角误差测量系统
3.1 XOZ平面倾角误差测量实验
线激光传感器安装高度H为531 mm,改变被测物高度,得到10组不同高度的点云数据,遍历所有点,计算其倾斜角度和倾角误差值,得到XOZ平面倾角误差三维散点分布图,如图8(a)所示。图8(b)、(c)分别为三维散点图的两个截面,可以看出,在传感器的测量范围内,测量距离对倾角误差影响较小,10组数据中有1组数据存在较大误差,超出了倾角误差的范围,需对误差过大的点云数据进行滤除。
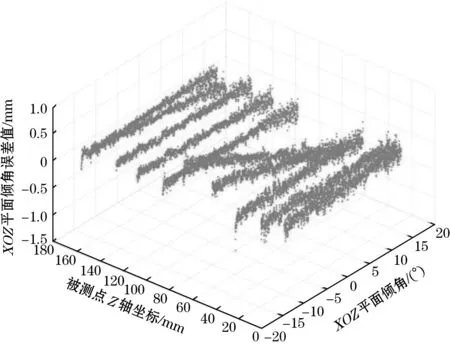
(a)XOZ平面倾角误差三维散点图
滤噪后XOZ平面倾角误差与倾角关系如图9(a)所示,角度越大,激光点产生的倾角误差也越大;对保留点进行差值拟合,得到被测点Z轴坐标、倾斜角度和XOZ平面倾角误差值之间的映射关系,如图9(b)所示。

(a)XOZ平面倾角误差与倾角关系
3.2 YOZ平面倾角误差测量实验
控制倾角调节平台在YOZ平面进行顺时针和逆时针旋转,当顺时针旋转角度大于45°或逆时针选择角度大于60°时,所用传感器已无法正常接收反射光。每次转动角度为5°,计算YOZ倾角误差值,并对点云数据进行拟合,得到倾斜角度与误差曲线,如图10所示。分析可知,YOZ平面倾角在0~60°的范围内时,倾角误差随着倾斜角度的增大而增大,且为非线性增加,当倾斜角度相同时,顺时针旋转产生的倾角误差更大,在45°时倾角误差分别为0.188 mm和0.387 mm。
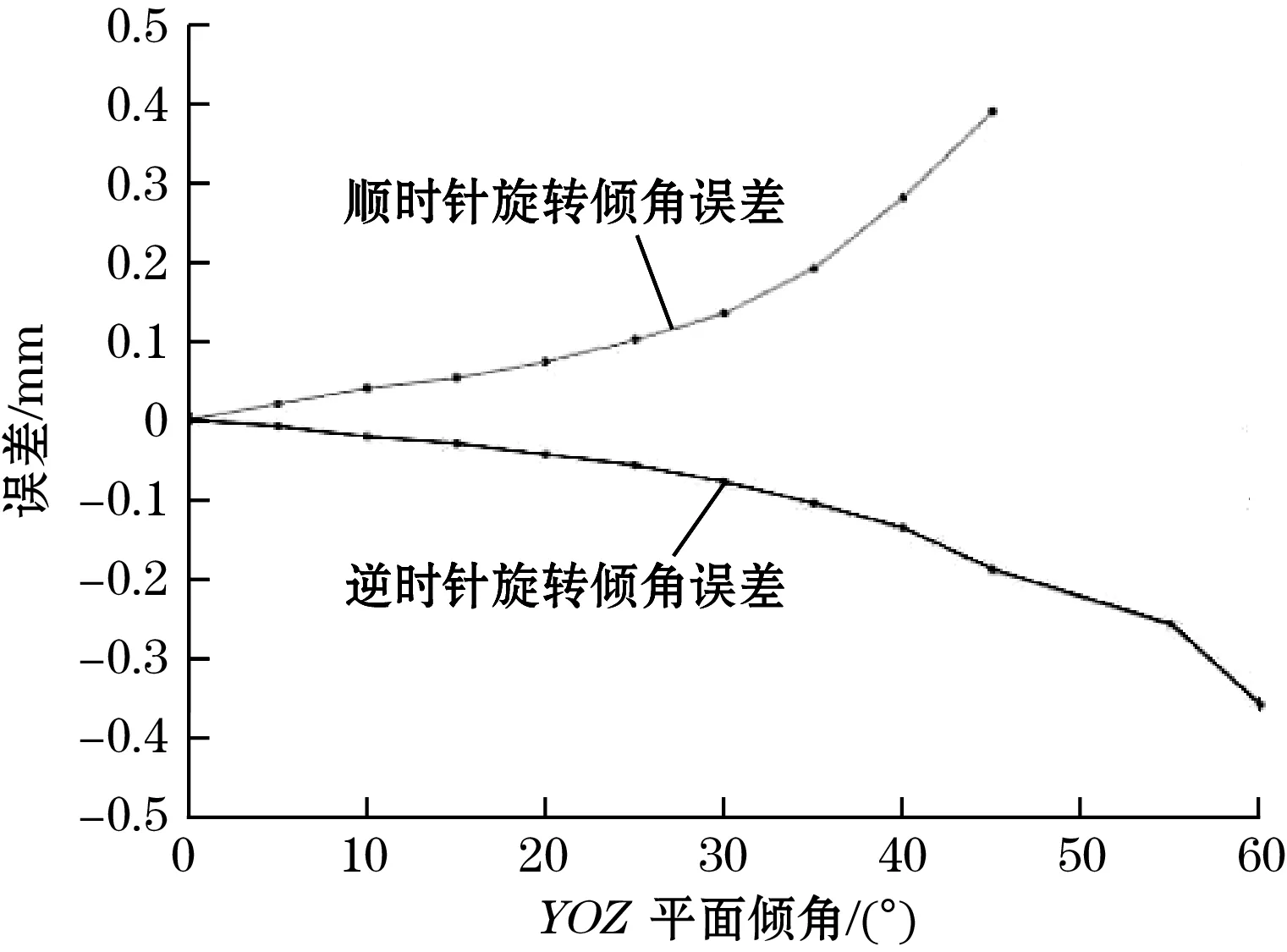
图10 YOZ平面倾角误差曲线
3.3 倾角误差补偿实验
对比图9(a)和图10可以看出XOZ平面和YOZ平面倾角越大误差也越大,定义YOZ平面顺时针旋转方向为Y轴正方向,YOZ平面倾角若大于0°则误差为正,若倾角小于0°则误差为负,对YOZ平面倾角误差进行补偿,只需减去YOZ平面倾角误差曲线中对应倾角的误差值即可;而XOZ平面倾角与误差的之间没有正负关系,同样倾斜角度下误差可能为正也可能为负。对此,提出一种XOZ平面的误差补偿方法,先对激光点云进行拟合,再遍历所有激光点,计算每个激光点的残差和倾斜角度,若残差为正则减去对应倾斜角度的误差正值进行补偿,若残差为负则减去对应倾斜角度的误差负值进行补偿。
为验证补偿方法的可行性,使用90 mm的标准量块在不同倾角下进行测试,对比误差补偿前后激光线的残差均值,如表1所示,可以看出,补偿前倾斜角度越大,激光线的残差和量块测量误差也越大;进行误差补偿后,绝大部分残差均值在±0.050 mm内,量块平均测量误差减小到了0.028 mm,显著减小了物面倾角对线激光传感器的影响。

表1 误差补偿前后残差均值对比表
4 结束语
本文搭建了线激光传感器倾角误差测量平台,对线激光传感器在XOZ平面和YOZ平面产生的倾角误差进行了实际测定。对于XOZ平面倾角,由于线激光传感器的Z轴测量范围和X轴测量宽度的限制,激光点在XOZ平面的倾角测定范围不超过±20°,根据激光点在不同倾斜角度和被测距离的数据建立了-20°~20°范围内的误差-距离-倾角的映射关系;对于YOZ平面倾角,当倾斜角度超过[-60°,45°]的范围时,所用传感器已无法正常接收反射光,根据光轴激光点在不同倾斜角度的数据,得到了误差与倾角间的关系曲线。误差测定完成后,以90 mm的标准量块作为被测对象,根据倾角误差拟合曲线进行了误差补偿。结果表明:进行误差补偿后,激光线最大残差均值为0.073 mm,绝大部分残差均值控制在±0.050 mm内,量块平均测量误差由0.039 mm减小到了0.028 mm,提高了线激光传感器的测量精度和适用性。
猜你喜欢
中国交通信息化(2022年12期)2022-02-11
力学学报(2021年7期)2021-11-09
科学大众(2021年19期)2021-10-14
中国临床医学影像杂志(2021年6期)2021-08-14
北京汽车(2021年3期)2021-07-17
摄影之友(2020年12期)2020-12-23
中老年健康(2016年10期)2016-11-19
中国科技纵横(2015年17期)2015-12-14
应用光学(2014年3期)2014-06-01
空气动力学学报(2014年5期)2014-04-30