
履带式滩涂贝类采收机设计与试验
2023-08-22 11:04孟祥河李明智于功志赵益欧王杰群吴志宝
渔业现代化 2023年4期
孟祥河,李明智,于功志,赵益欧,王杰群,刘 创,吴志宝
(大连海洋大学航海与船舶工程学院,辽宁 大连 116023)
目前,中国滩涂贝类养殖规模发展迅速,2021年滩涂养殖产量约为62.24万t,占海水养殖产量的28.15%[1]。中国环渤海地区滩涂贝类养殖产业的贝类采收环节仍以人工作业为主。为降低滩涂贝类采收成本,提高作业效率,迫切需要开展机械化滩涂贝类采收装备的研发与应用。
20世纪40年代,国外学者开展滩涂贝类采收装备的研发工作。Hanks[2]研制了一款扶梯式水力采捕机,其利用高压水流进行贝类的采捕,其工作水深为1.8~3.6 m,采捕效率为110 ~120 m2/ h,破碎率不大于 25%,但该采收机会对海底环境造成较大的影响;Glude等[3]研制了一款水耙式水力采捕机,该机器借助水力喷射采捕贝类,对贝类的采捕效率可提高至95%,破碎率小于3%,但该机更适用于砂底滩涂而不是泥底;Murray等[4]研制了一款电力采捕机,可以用来采捕竹蛏,其采捕效率高,但是贝类采捕种类有限;Hoyseth[5]研究表明,由郁金香果实收割机改造成的蛤仔振动采捕机,可以降低贝类采收作业3%~5%的劳动成本,提高经济效益。
近年来,国内的学者也相继开始研发贝类的采收设备。王林冲等[6]研制了一款文蛤采捕机,利用高压水流冲沙,使泥沙和蛤分离,主要用于采捕成品文蛤,生产率为100~150 kg/h,破碎率约为2%,但该机器采捕选择性差;陆建等[7]研发了自走式滩涂贝类采捕机,该采捕机的生产效率约870 m2/ h、采捕率93.2%、破碎率2.1%,但其整体机械作业时体积较大,机动性能不足;李航企[8]研制了滩涂蛤类自动采捕机,生产效率约576 m2/ h、采捕率82 %、破碎率7.34 %,但轮式行走机构与滩涂表面接触面积较小。目前,环渤海大多数滩涂养殖区域为泥底滩涂,贝类采收仍采用人工作业方式,存在作业强度大,作业环境恶劣等问题。
本研究对大连市庄河市滩涂贝类养殖情况进行了调研,结合滩涂贝类采收的设计需求,以液压作为传动介质,利用振动筛实现贝泥沙混合物的筛选与分级,通过履带式行走机构实现设备在滩涂表面稳定行走和作业。本研究设计了一款集贝类挖掘、分级与收集功能于一体的滩涂贝类采收机,并通过生产试验,论证该采收机安全稳定性及替代人工的可行性,以期达到提高滩涂贝类养殖产业机械化水平的效果。
1 整机设计与工作原理
1.1 整机结构
履带式滩涂贝类采收机整机结构如图1所示,整机主要由液压动力系统、振动传送机构和履带式底盘结构3部分组成。液压动力系统主要由柴油发动机、橡胶式履带、挖掘铲、液压油箱、输送网链、液压缸及相关零件组成,由柴油发动机为液压双联泵提供动力,通过液压管路,将动力合理分配到各部分,由操作阀对各个液压工作元件进行控制;振动传送机构由振动筛、输送网链、收集装置、振动筛、挖掘铲等组成,振动筛与底盘通过轴连接,并且振动筛前端加装伸缩液压缸,液压缸的另一端与支撑框架固定,振动筛是由挖掘铲、筛网和摇臂组成;履带式底盘结构由履带、车轮、底盘框架、机架等结构组成,实现整体采收装置在滩涂正常的行驶与作业。

图1 履带式滩涂贝类采收机整机结构示意图
1.2 工作原理
采收作业选择落潮后涨潮前时间段进行,此时滩涂表面无积水或仅为10 cm以下浅水层。履带式滩涂贝类采收机进行作业时,通过液压系统控制振动筛前端上方的液压缸伸缩,调节挖掘铲板至合适作业深度,在滩涂贝类采收机向前行进的同时,振动筛和输送网链开始工作,利用挖掘铲将埋栖在滩涂泥沙下的贝类与沙土铲起并运输至振动筛的筛网上,随着振动筛工作,会将泥沙与小规格滩涂贝类从振动筛间隙中回落滩涂表面,等待下一次采收,而符合采收规格的贝类会继续运动至振动筛尾端,进入输送网链,再由输送网链将贝类运送到收集框中。
2 关键工作部件设计
2.1 振动筛机构设计
振动筛是整个履带式滩涂贝类采收机的重要机构,起到挖掘、筛泥、运输和贝类初步分级的作用。振动筛主要由振动筛挖掘铲、振动筛筛网、偏心轮、振动筛前摇臂、振动筛后摇臂和减速箱等组成,振动筛结构示意图如图2a所示。综合考虑滩涂的地质特点[9]和采收机的结构,设置采收宽度为1 000 mm。建立振动筛筛面贝泥沙混合物数学模型[10-11],得到振动筛筛面倾角α1振动筛转速nx的理论范围,为采收机的设计提供参考。本研究采用的是固定式平面挖掘铲[12],挖掘铲的作业深度可以通过液压油缸伸缩控制承接拉杆来调节。

图2 振动筛结构示意图
泥沙贝分离装置的筛面运动简图如图2b所示,工作时,液压马达带动曲柄AB绕主轴旋转,带动连杆BC,从而使摇杆CDE绕铰接点D来回摆动,使得摇杆DE、JH做周转运动,实现振动筛的往复摆动,在运动过程中,混合物应能够向上运输,因此惯性力方向沿振动方向向上,对其分析可得:
Fcos(ε1-φ1)>Gcosφ1+fh
(1)
Fsin(ε1-φ1)+N1=Gcosφ1
(2)
G=mg
(3)
F=mω2rcosωt
(4)
联立上式可得:
ω2rcosωtcos(ε1-φ1-α2)>
gsin(φ1+α2)
(5)
式中:α1为筛面倾角;ε1摆动方向角,取31°[13];fh筛面摩擦力,N;α2为贝泥沙混合物与筛面的摩擦角,取23.7°;m为贝泥沙混合物质量,kg;G为贝泥沙混合物重力,N;F为惯性力,N;N1为垂直于筛面的物料法向反力,N;ω为曲柄角速度,rad/s;r为曲柄半径,m。
为了保证贝类分离效率,并且减小贝类的损伤,振动筛筛面倾角范围可为10°~15°,振动筛转速nx范围为200~380 r/min。
2.2 履带式底盘结构设计
2.2.1 装置接地压强计算
当采收机在滩涂上行走与作业时,履带接地压强呈均匀分布状态,则接地压强的表达式为:
(6)
S=2BL
(7)
F=Mg
(8)
即本装置接地压强计算公式:
(9)
式中:P为接地压强,Pa;F为承受压力,N;S为接地面积,m2;M为采收机质量,kg;g为重力加速度,10 m/s2;B为履带接地宽度,m;L为履带接地长度,m。
履带式滩涂车的接地压强应不超过80.13 kPa[14-15],综合考虑采收机的作业需求与履带自身重力,选择履带宽0.3 m,接地长度2.5 m,整机质量约2 500 kg,计算采收机接地压强约P=16.67 kPa,此理论接地压强计算值能够满足采收 机在滩涂上的正常行走和作业,且具有较大的余量,以便后续设备的加载。
2.2.2 机架的承载力分析
采收机机架承载了液压动力系统、挖掘传送机构以及外罩等零部件。机架的设计应当在满足强度要求的基础上尽可能结构简单,采收机在作业时,机架并不会直接接触海水,因此机架采用碳素结构钢焊接而成,并辅以防锈漆防护。采收机机架如图3所示。

图3 采收机机架示意图
采收机机架作为重要的承载机构,需要达到足够的强度,根据整机结构的布置,利用SolidWorks软件对机架施加相应的力,进行有限元分析,分析结果如图4所示。
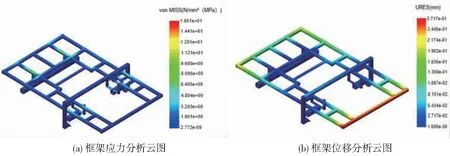
图4 采收机机架有限元分析
根据仿真结果分析,最大应力发生在驾驶员座椅位置的中间梁和横梁处,且最大应力为16.01 MPa,远远小于材料屈服极限248 MPa,且具有较大的余量,符合设计需求;最大形变量仅为0.217 mm,相对于整体设备来说,此变形量可满足作业需求。
2.3 基于双联泵整机液压系统设计
2.3.1 发动机功率计算与选型
采收机所需功率与滩涂土壤、地形、行走速度、挖掘深度有关,因此,功率计算要充分估计到负荷最大的情况,以所需功率的最大值作为采收机动力选择的依据。整机的功率P0(kW)可按照下列公式计算:
P0=P1+P2+P3+P4
(10)
式中:P1为行走机构所需功率,kW;P2为挖掘铲挖掘贝泥沙混合物所需功率,kW;P3为振动筛工作所需功率,kW;P4为输送装置所需功率,kW。
1)自行走底盘所需功率P1与履带式滩涂贝类采收机前进速度、整机质量以及土壤状况有关,可用下式计算:
(11)
式中:m为履带式滩涂贝类采收机整机质量,kg;Vm为履带式滩涂贝类采收机最大行驶速度,m/s;fm为滚动阻力系数[16];η1为自行走底盘的传动效率系数,取η1=0.8[17]。
2)对作业时的挖掘铲进行受力分析,分析简图如图5所示,此时受到机械牵引力W2,土壤作用于铲面的法向载荷力Nh,沿铲面斜向上的土壤摩擦力f1,土壤附着力f2,土壤切削力f3,滩涂中的纯切削阻力很小,只有当土壤中有石头或刃口变钝时,切削阻力才显得重要,如果不存在这些情况,土壤的纯切削阻力f3可以忽略不计[18-19]。

图5 挖掘铲受力分析简图
挖掘铲作业时所需功率可用下式计算:
f1=μ1Nh
(12)
f2=CS
(13)
(14)
W2=Nhsinα+f1cosα+f2cosα
(15)
(16)

(17)
(18)
式中:ρ为滩涂泥沙混合物密度,kg/m3;H为入泥深度,m;b为挖掘铲宽幅,m;L1为挖掘铲铲面宽度,m;α为挖掘铲入泥角度,(°);β为前失效面倾角,(°);C1为泥沙内聚力因数,N/m2;C泥沙附着力因数,N/m2;μ1为挖掘面摩擦系数,可取0.3;S为挖掘铲面积,m2;η2为传动效率系数,取η2=0.8。
3)筛选装置在作业时最大转速为380 r/min,则筛选装置所需功率P3(kW)可用下式计算:
(19)
式中:T为振动筛液压马达扭矩,m;n为振动筛液压马达最大转速,r/s;η3为液压马达机械效率。
4)输送网链材质选择不锈钢网链,输送装置所需功率P4(kW)可由下式计算:
(20)
FU=F1+F2
(21)
F1=CUfULH(2qB+qG)cosλ
(22)
F2=qGgHU
(23)
式中:FU为合力,N;VU为传送带运行速度,m/s;ηU为输送装置传动效率;F1为主要阻力,N;F2为提升阻力,N;CU为附加阻力系数,取CU=2.1;fU为模拟摩擦因数;LH为输送距离,m;qB和qG分别为输送带每米质量和每米物料质量,kg;λ为输送装置倾斜角。
将各个参数数值代入式(10)~(23),可得P1=3.20 kW,P2=0.85 kW,P3=6.99 kW,P4=1.86 kW,所以P0=12.90 kW。综上,确定履带式滩涂贝类采收机动力可用YN25GB柴油机,其主要技术参数:转速 2 200 r/min;额定输出功率37 kW,净质量200 kg。
各项设计参数含义与取值如表1所示。

表1 设计主要参数取值
2.3.2 基于双联泵液压系统设计与建模
履带式滩涂贝类采收机使用柴油发动机为液压双联泵提供动力[20],在采收机作业时,选择双联泵中排量为16 mL/r单独带动左侧的液压行走马达,形成独立的液压回路;排量为32 mL/r形成另一独立回路,此回路不仅需要带动右侧液压行走马达,同时需要提供振动筛液压马达,传送带液压马达和液压缸工作的动力,所以在双联泵的回路中串联一个组合控制阀,以便控制作业时的马达工作的状态。
在液压系统仿真软件AMESim[21-22]环境下,对采收机液压系统进行合理建模,如图6所示。

图6 整机液压系统仿真模型
2.3.3 仿真参数设置
履带式滩涂贝类采收机属于农业机械,农业机械设备的液压系统压力为10~16 MPa[23-24],确定采收机液压系统压力为13 MPa,仿真主要参数如表2所示。设置运行参数时间为20 s,时间间隔设置为0.01 s,周期为0.2 s。
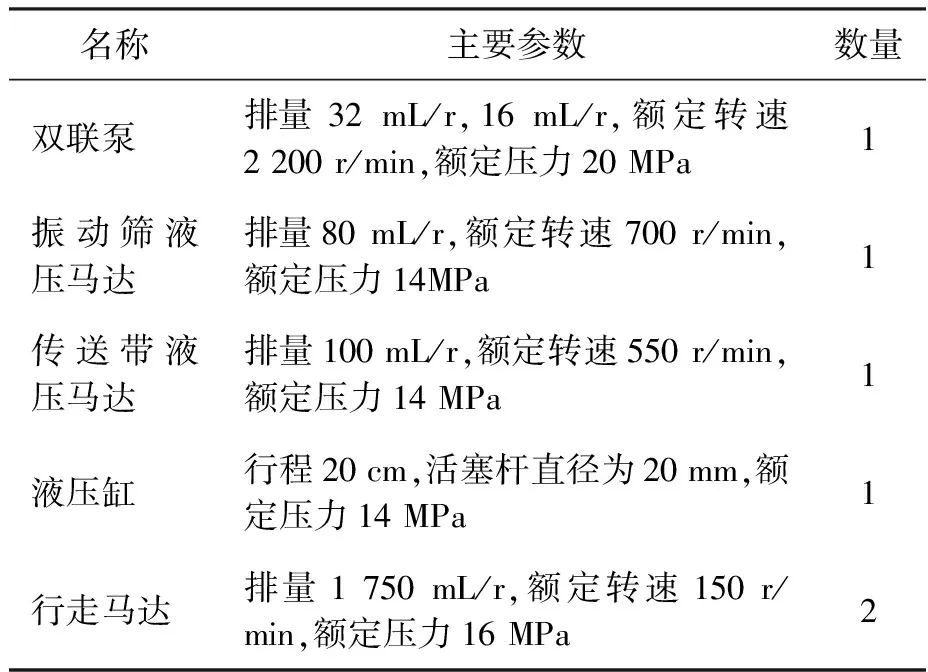
表2 液压元件模拟仿真主要参数表
2.3.4 仿真结果分析
为了验证履带式滩涂贝类采收机能够在滩涂上正常作业,设定好参数仿真,需要对调节挖掘深度的液压缸进行分析,同时也需要对行走马达和挖掘与传送液压马达进行相应分析,仿真结果如图7所示。

图7 采收机液压仿真曲线
由图7a可知,两侧液压行走马达在启动时流量波动较大,但短时间内会稳定在10.8 L/min左右,且能够实现行走马达正反转;由图7b可知,液压缸能够正常进行伸缩,最大行程为20 cm;由图7c和图7d可知,传送带液压马达和振动筛液压马达在启动后都能在较短的时间内趋于稳定,且都能正常工作。结合仿真结果分析可以得出:液压系统设计能够满足采收机在滩涂上作业的需求。
3 样机试验
3.1 试验材料
为论证履带式滩涂贝类采收机行驶性能、作业稳定性和采收效果,于2022年6月9—11日在大连市庄河市青堆镇滩涂贝类养殖区(北纬39°44′31″,东经123°16′32″)进行样机试验。
试验地平坦、无障碍物,保证采收机正常作业,根据采收试验需求,选取好贝类采收试验的滩涂区域。性能试验所用试验仪器及材料有:履带式滩涂贝类采收机1台,如图8所示,卷尺、铁锹、人工爬齿、秒表、电子秤、卡尺等工具。

图8 履带式滩涂贝类采收机样机
3.2 试验方法
试验分两阶段进行,第1阶段采用正交试验,第2阶段进行生产性对比试验。
第1阶段:为验证整机系统和各个设备的适用性和可靠性,确定采收机的最佳参数,进行正交采收试验,确定最佳工艺参数;根据正交试验结果进行生产实测,进一步验证系统的稳定性。
采收机作业速度、振动筛转速和筛面倾角是影响采收机采收效率的主要因素。采收机作业速度可控制在0.1~0.25 m/s,振动筛转速为200~380 r/min,振动筛筛面倾角范围10~15°,建立3因素4水平[25]的正交试验设计,试验因素水平如表3所示。

表3 正交试验因素及水平
根据试验因素水平表,利用SPSS软件[26]对正交试验进行极差分析,试验结果和极差分析结果如表4所示。
在不同试验条件下,测量采收机在20 min内采收到四角蛤蜊的质量,采收效率为单位时间内采收四角蛤蜊的质量:
Wd=Wg/Td
(24)
式中:Wd为采收效率,kg/min;Wg为采收到四角蛤蜊的质量,kg;Td为采收时间,min。
第2阶段:人工作业和机械作业进行对比试验,试验分别在4块试验场地进行,在每块试验场地可进行4次人工和机械的对比试验,在单次试验采收时间相同的情况下,对比单位时间的采收量与贝类平均破碎率。履带式滩涂贝类采收机需2人进行辅助作业;人工作业12人为1组,携带日常作业时的工具进行正常作业。
3.3 试验结果
3.3.1 最佳工艺参数确定
为保证振动筛的工作效率,设计振动筛转速nx的范围为200~380 r/min。因此由表4可知,最佳工艺参数组合为A2B4C2,即作业速度0.15 m/s,振动筛转速380 r/min,振动筛筛面倾角12°,各因素对履带式滩涂贝类采收机采收效率影响大小的顺序依次为振动筛转速、振动筛筛面倾角、作业速度。
3.3.2 验证试验
贝类采收机的3次采收验证试验采收效率分别为6.21、6.22、6.23 kg/min,平均采收效率约为6.22 kg/min,高于目前已知的工艺参数的最高采收效率6.21 kg/min,说明正交试验优选的作业参数合理。
3.3.3 对比试验
生产对比试验的履带式滩涂贝类采收机的工艺参数分别为:作业速度0.15 m/s,振动筛转速380 r/min,振动筛筛面倾角12°。
试验结果如图9所示,在4块试验场地分别对机械和人工的作业效率和采收贝类破碎率进行对比,试验结果表明,人工平均作业效率分别为6.13、6.11、6.12、6.08 kg/min,采收贝类的平均破碎率为1.2%、1.5%、1.4%、1.4%;机械平均作业效率分别为6.09、6.10、6.13、6.08 kg/min,采收贝类的平均破碎率为3.9%、4.1%、3.8%、4.2%,不同试验场地间的机械平均作业效率和采收贝类平均破碎率差异性不大。机械作业与人工作业在作业效率方面无显著差异(P>0.05),但在贝类平均碎贝率方面显著增加(P<0.05)。

注:柱状图上方相同字母表示差异性不显著(P>0.05),不同字母表示差异显著(P<0.05)
4 讨论
丁肇等[27]研究表明,履带相比于轮胎具有更大的接地面积,能够有效减小车辆对土壤的平均压力,本研究针对环渤海滩涂养殖区域为泥底滩涂易塌陷问题,选择接地压强更小的履带式底盘机构,使滩涂贝类采收机能够适应复杂的滩涂底质,且能正常高效的作业。吴金娥等[28]研究表明,固定式挖掘铲是直接与机架成刚性连接的,结构比摆动式挖掘铲简单,制造方便且不需要动力传动,综合考虑作业环境和作业强度,采收机挖掘机构选用固定式挖掘铲。郭春阳等[29]研究表明,不同规格贝类的埋深有所差别,因此滩涂贝类采收机在振动筛前端加装伸缩液压缸,可调节振动筛挖掘深度。
孙伟光等[30]研究表明,液压马达在启动时会有明显的转速波动,本研究在对采收机两侧液压马达进行仿真模拟时,流量仿真曲线也出现了波动,但在较短时间内能达到平稳状态。崔振猛等[13]研究表明,振动筛上物料的运动形式主要取决于运动参数和振动筛筛面倾角,为了保证贝类分离效率,并且减小贝类的损伤,故在最佳工艺参数选择中,振动筛转速只能取设计范围内的最优值。
常悦[31]研究表明,滩涂养殖的四角蛤蜊分布密度不均匀,本研究在对比试验过程中,履带式滩涂贝类采收机会将采收区域全部采收完成后进行采收数据的统计,而人工采收则是根据自身经验,进行选择性挖掘,故存在机械的作业效率略低于人工。母刚[32]研究表明,蛤壳是一种脆性材料,蛤仔之间的碰撞与摩擦就有可能导致蛤壳的破裂,严重地冲击和碰撞会直接导致蛤的死亡。沈建等[33]研究表明,贝类在振动筛上进行筛选的过程中易发生冲撞摩擦及损伤等问题, 因此采收机采捕的贝类仍会存在一定的破碎率。
5 结论
设计了一款履带式滩涂贝类采收机,最大行驶速度为0.25 m/s,动力性能充足,最大挖掘深度130 mm,能够实现不同滩涂贝类的挖掘、分级及收集等功能。通过对履带式滩涂贝类采收机工艺参数的优化与论证,得出作业速度0.15 m/s,振动筛转速380 r/min,振动筛筛面倾角12°为最佳;各因素对履带式滩涂贝类采收机采收效率影响大小的顺序依次为振动筛转速>振动筛筛面倾角>作业速度。研究表明,采收机的平均作业效率为5.7 kg/min,平均破碎率小于5%,且1台履带式滩涂贝类采收机的作业效率和12人作业效率相当,说明该装置结构合理,设计稳定可靠,采收稳定,动力性能优越,通过性和稳定性满足滩涂作业要求。
猜你喜欢
海洋通报(2022年5期)2022-11-30
机械管理开发(2021年11期)2022-01-25
机械管理开发(2021年6期)2021-07-28
重庆科技学院学报(自然科学版)(2021年3期)2021-07-03
理化检验-化学分册(2020年5期)2020-06-15
食品与生活(2019年8期)2019-10-30
河北农业科学(2018年2期)2018-07-26
现代机械(2018年1期)2018-04-17
河南科技(2014年4期)2014-02-27
山西大同大学学报(自然科学版)(2014年6期)2014-01-23
