
基于圆弧阵加权的水平全向扫描多波束渔用声呐波束成形旁瓣抑制研究
2023-08-22 11:04王志俊李国栋
渔业现代化 2023年4期
程 婧,王志俊,魏 珂,李国栋,2
(1 中国水产科学研究院渔业机械仪器研究所,上海 200092;2 青岛海洋科学与技术试点国家实验室,山东 青岛 266237)
海洋捕捞业作为渔业的重要组成部分,利用渔用声呐可以提高海上作业的效率。现有的渔用声呐常采用单波束、分裂波束、多波束等技术进行探测,多波束渔用声呐相较于传统单波束声呐可对探测区域进行快速扫海,能够更加准确地判断鱼群与渔船的相对距离与方位,被广泛应用在海洋渔业中。
波束成形技术作为全方位多波束渔用声呐研制中的关键技术,可以提高探测距离和空间分辨能力[1],被广泛应用在军事[2-3]、通信[4]、医疗声学[5]、海底地貌勘测、海上石油勘探等领域[6]。波束成形中最大辐射波束为主瓣,是声呐探测的主要工作方向[7],其余波瓣为旁瓣。主瓣宽度越窄波束的指向性越好,作用距离越远,抗干扰能力越强,渔用声呐成像效果越好,而旁瓣的存在会使声能量扩散,影响波束的指向性,使声呐的成像较为模糊[8]。加权作为一种可以有效抑制旁瓣并改善基阵方向性的方法[9-10]。在波束成形算法的设计中具有一定的研究意义,可以改善渔用声呐在波束成形中由于旁瓣带来的干扰,从而提高渔用声呐的抗干扰能力和成像精度[11-12]。加权方法主要包括改变前置放大器的放大倍数和添加不同的加权值[5], 是根据变压器的阻抗匹配确定的[13-14],若后续对其进行调整,成本较高;添加不同的加权值主要是对参与波束成形的阵元进行幅度加权,传统幅度加权的方法主要被广泛应用在线列阵中[15-16],如切比雪夫加权[17-18]、Hanning窗加权、Hamming窗加权、布莱克曼窗加权等,切比雪夫加权法相较于其他加权法较为成熟[5,18],可以在旁瓣高度确定的情况下获得最窄的主瓣,或是在主瓣宽度给定的情况下获得最低的旁瓣[20-21]。水平全向多波束渔用声呐中常见的换能器基阵为圆柱阵,当声呐进行水平扫描时圆柱阵可等效为垂直排列的多个圆弧阵,且对基阵的水平加权直接地影响了水平的波束扫描成像效果。圆弧阵为非线性阵,上述的直线阵加权方法对其加权的性能有待进一步分析。
本研究根据多波束圆柱阵渔用声呐的基阵建模,采用了相似加权和抑制区最小功率法两种加权方法,并与线列阵加权方法对基阵波束成形性能的影响进行了对比,设计了一种基于圆弧阵的分布式多板同步的加权方式,实现了在主瓣展宽较小的情况下,有效抑制旁瓣高度的水平方向上的波束加权。
1 全方位渔用声呐基阵情况
全方位渔用声呐常见的基阵形式主要有可以转动的面阵、体积阵、球面基阵和柱形基阵等。相对于其它基阵,圆柱形基阵的机械结构较为简单[22-24],具备灵活的追踪目标的方式[25],对水平全向具有相同的探测能力,因此被广泛应用在渔用声呐中。
以256阵子组成的圆柱阵换能器为例,每列有N个阵子,共计256/N列阵子,可以实现水平全向和垂直60°的扫描[26]发射和接收,确保在探测过程中全面覆盖目标海域,同时采用多个阵子同步接收的工作模式[27]。在实现过程中由于该型号换能器阵子数目较多,单块板卡无法独立对接收到的声信号进行处理,因此采用分布式跨板间的处理方式来提高运算速度,每个扇区由M列,N行阵子组成,单个扇区可以完成水平多个波束的接收波束成形,最后进行波束左、右瓣相加组成对应的波束。
选取该圆柱阵换能器阵子的常见排列方式如图1、图2进行仿真和研究,相邻两列阵子上下交错排列,共有8个扇区,每个扇区有8列、8行阵子,相邻两列阵子与圆心的夹角为11.25°。
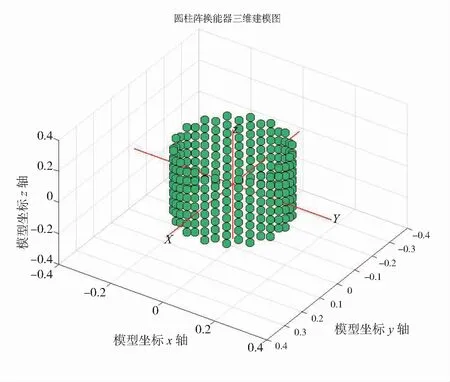
图2 圆柱阵换能器三维建模
2 波束指向性
基阵指向性计算如图3所示。
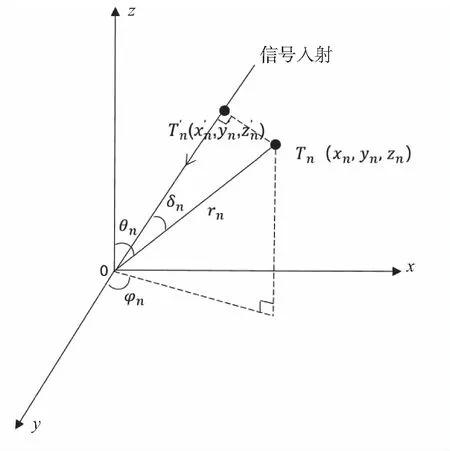
图3 基阵指向性计算
基于Matlab软件并结合基元离散分布的空间基阵[28]对上述模型进行建模。Tn表示一个扇区中第n个阵子且其对应的直角坐标系坐标为(xn,yn,zn),对应的球坐标系为(θn,φn,rn),rn为Tn到圆心O点的距离,两个坐标系的对应关系如下:
xn=rnsinθncosφn
(1)
yn=rnsinθnsinφn
(2)
zn=rncosθn
(3)
若入射信号的方向为(θ,φ),则它与坐标原点O的连线分别与3个坐标轴的夹角为α、β、γ,则有:
cosα=sinθcosφ
(4)
cosβ=sinθsinφ
(5)
cosγ=cosθ
(6)
波束成形本质上为利用声波到达换能器的声程差和相位差来计算,当回波传到各个阵子的时候,由于声呐基阵上各个阵子的排列位置不同,导致其接收到的信号也有所差异。根据上述建模要求以及公式并结合下图球形坐标系可得各个阵子与参考点O的声程差OT′n为该点与参考点在入射信号方向上的投影dn:
dn=rncosδn=xnsinθcosφ+ynsinθsinφ+
zncosθ
(7)
若基阵的极大值指向(θ0,φ0)则对应声程差dn:
dn=rncosδ0=xnsinθ0cosφ0+ynsinθ0sinφ0+
zncosθ0
(8)
声波在水下的传播速度约为c=1 500 m/s,根据时间速度公式以及相位和时间的关系可得相位差ξn为:
+zncosθ0)
(9)
则基阵的指向性函数D(θ,φ)为:

(10)
式中:An为单个阵子的指向性,以该基阵常见的单阵子期望开角为78°为例,阵子的指向性根据所在位置有所差异,其公式如下,其中ρn为所在列相对于x轴的夹角度数。
(11)
以第一个扇区为例,当期望指向性角度为水平方向φ0=0°,垂直方向θ0=90°时,从扇区左侧开始向右数第4个阵子的指向性如图4所示,根据公式(10)可得此时在垂直90°方向做切面的圆柱阵二维波束指向性如图5所示,此时第一扇区的波束指向性开角约为14°。

图4 第4个阵子的指向性
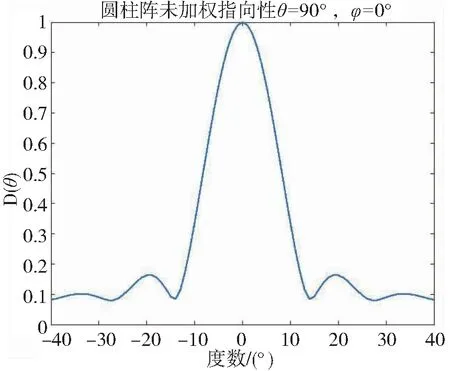
图5 圆柱阵指向性
3 线性加权
3.1 线性加权方法
水平加权直接影响了水平全向扫描的成像效果,因此主要对该种渔用声呐在水平方向上的加权方法进行研究,圆柱阵在此应用场景下可等效于多个垂直排列的圆弧阵。基于分布式多板卡同步的工作模式,加权方式主要采用按照扇区每行阵子进行计算的方式。由于扇区的开角较大弧度较小,因此在仿真时首先采用等间隔直线阵对圆弧阵进行近似加权。线性加权的方式主要包括汉宁加权、汉明加权、布莱克曼加权和切比雪夫加权[29]。
汉明窗加权为升余弦窗[30],其对应权值whamm_n表达式为:

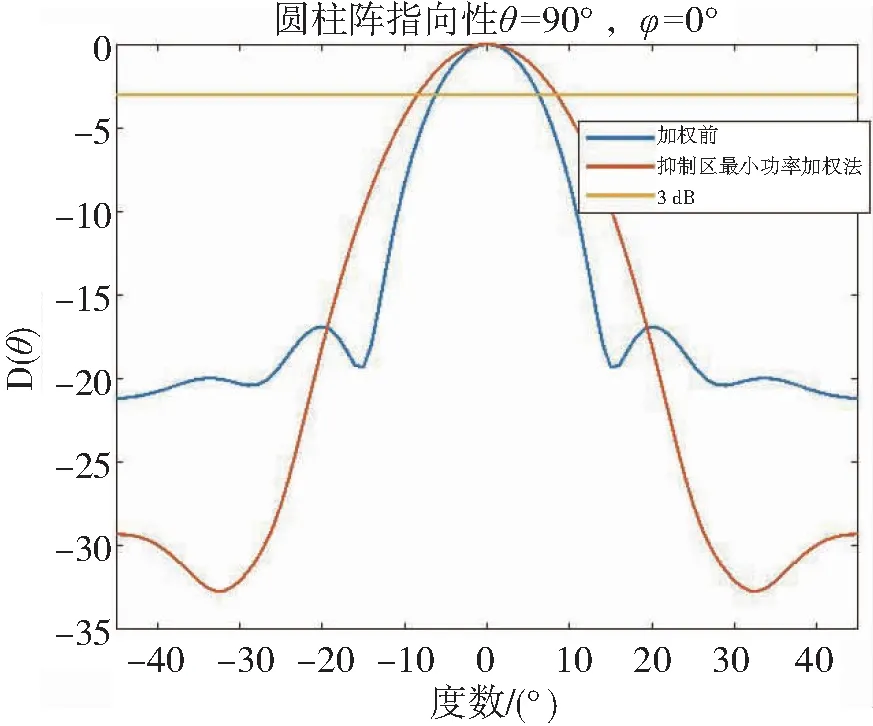
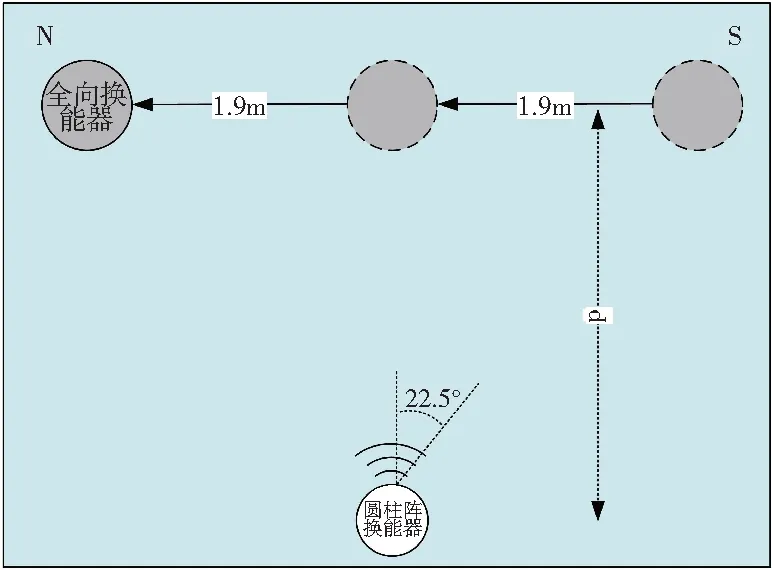
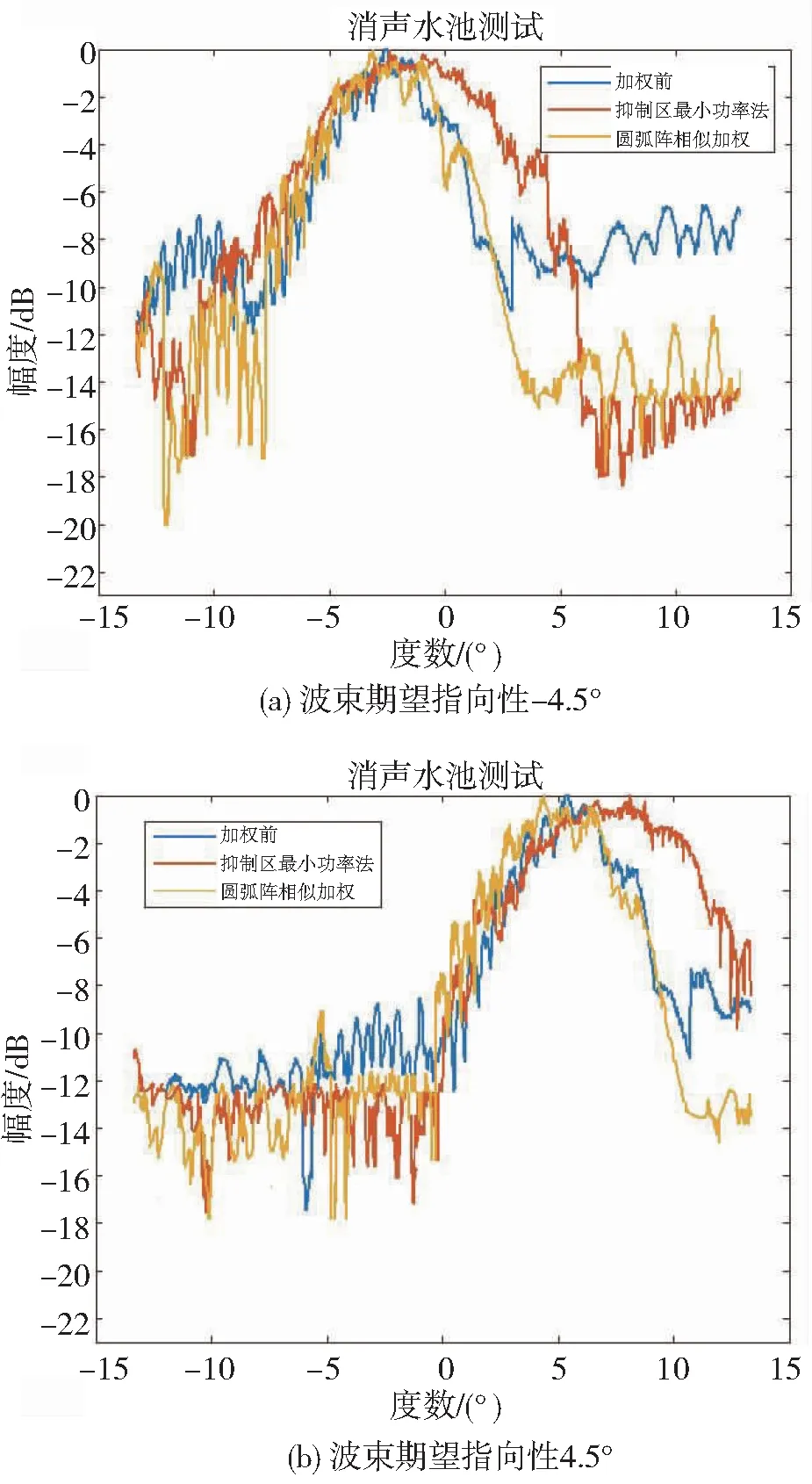
0 (12) 汉宁窗与汉明窗的形式很接近,但后者可以保证窗函数值在最低谷时也不为0,汉宁窗的对应权值whann_n计算公式如下: 0 (13) 布莱克曼窗为二阶余弦窗,其对应权值wblkman_n表达式如下: (14) 道夫-切比雪夫加权是等间隔线阵中最为常见的一种加权方式[31],其权值计算公式为: M≥n>1,s= 0、1、...、n-2 (15) 由于圆弧阵为左右对阵,以第一扇区为例,x轴左侧与右侧的加权值应当是对称的,因此公式(12)~(15)中的M均为8,n的取值则为1~4。根据常见的设计参数主旁瓣高度比A为30 dB,当期望指向性角为水平方向φ0=0°,垂直方向θ0=90°时,将上述加权方式计算出来的权值代入公式(10)可得到公式(16)的基阵的指向性函数D(θ,φ),式中wn为第n个阵子对应的加权值。 (16) 由3.1节中的不同加权方式的计算方法可得出对应的权值wn,并将对应的权值代入公式(16),即可得到不同加权法对波束指向性的影响下图所示。 不同加权方式的指向性仿真结果如图6所示,在-3 dB时,布莱克曼加权的主瓣展宽最大,相较于加权前主瓣宽度增加了约6°,其余加权值所带来的主瓣展宽均约为4°,切比雪夫的旁瓣较加权前旁瓣值降低了约13 dB,而汉宁窗加权和汉明窗加权过后的旁瓣相对于加权前旁瓣仅降低了5 dB。进一步证明了,当圆弧阵的弧度较小时,切比雪夫加权的效果依然较为理想。 图6 不同非线性加权的波束指向性对比 上述加权过程是将圆弧阵近似为直线阵进行的,但圆弧阵实际是有一定弧度的,因此非线性的加权对该类型可等效于多个圆弧阵的圆柱阵换能器应当更为准确。本研究采用相似加权和抑制区最小功率法两种非线性加权[19]方式,主要对非线性加权进行相关研究,对使用不同非线性加权方法后的圆柱阵换能器的波束指向性进行仿真和分析。 (17) 根据施瓦兹不等式可得: (18) 当且仅当wn与An成比例时,该不等式成立,当建模的坐标轴穿过圆弧阵中心是的相似加权的权值计算公式如下,其中k为常数。 wn=kξ[φ0-(n-0.5)α] (19) 将公式(11)进行变换,并结合公式(19),可得如下符合技术要求的权值计算公式: (20) 根据图1可得x轴穿过两列阵子中心,因此x轴两侧的加权值对阵,由公式(20)计算出4个加权值,后根据对称原则可得出一个扇区中每行的加权值。当期望指向性角度为水平方向φ0为0°,垂直方向θ0为90° 时,经过圆弧阵相似加权后的圆柱阵波束指向性以及加权前的波束指向性如图7所示,在相似加权的算法下,主瓣展宽仅1°,旁瓣相较于加权前波束旁瓣降低了约9 dB。 图7 相似加权法与未加权的波束指向性对比 本节仿真首先基于圆弧阵的建模,并选定一个抑制区,即旁瓣所在区域为需要抑制的部分,同时结合抑制区功率最小法对圆弧阵的每一个阵子的权值进行计算,最后带入圆柱阵的指向性函数中绘制出波束指向性图。 根据x轴穿过两列阵子中间可得圆弧阵的指向性函数如下:An(θ)为单个阵子的指向性函数,wn为每个阵元对应的加权值,M/2为x轴两边单侧的阵子数。 (21) 式中:n=1、2、…、N,N为圆弧阵整体的阵子数[19]。 根据拉格朗日乘子法L(θ,λ)=f(θ)+λg(θ)可得如下式子: (22) (23) (24) 根据公式(24)可得: +cos(Δi(θ)-Δk′(θ))+cos(Δi′(θ)-Δk(θ))+cos(Δi′(θ)-Δk′(θ))]}=-λ (25) 由于圆弧阵的对称性公式(25)中的M=8,系数w累加为1/2,由图8可得,E=[-180,-14]∪[14,180]。由此可将公式(25)解算出,即可得到对应的圆弧阵加权值,带入圆柱阵指向性后其波束指向性如图9所示: 图9 抑制区最小功率加权法的指向性与加权前指向性对比 当期望指向性角度为水平方向φ0为0°,垂直方向θ0为90° 时经过抑制区最小功率加权法加权后的圆柱阵波束指向性以及加权前的波束指向性如上图所示,在该种加权的算法下,主瓣展宽约为6°,旁瓣较加权前相比降低了12 dB。 将圆弧阵加权方法与传统的直线阵加权法的仿真结果进行对比如图10所示。由图10可知,线性和非线性的加权值在圆柱阵的波束指向性中均可抑制旁瓣。抑制区最小功率加权法的主瓣展宽较大,但其抑制旁瓣的效果较好,不适用于波束间隔较小的声呐中,相似加权法的主瓣展宽较汉明窗宽约1°,但其抑制旁瓣的效果与切比雪夫加权法相比较弱[11]。在圆柱阵换能器中相似加权依旧可以使信噪比达到最大[28],同时对期望指向性也无较大影响,而抑制区最小功率加权法的加权效果会带来相对较大的波束展宽。 为了进一步验证上述圆弧阵加权方法的有效性,在消声水池进行了试验。综合考虑现有的试验环境,对正对目标的一个扇区的所有阵子进行加权,并利用网口采集相关波束的数据。 测试时为了方便观察和数据存储,采用了收发分离的测试方法,其平台搭建如图11所示。全向换能器和待测圆柱阵换能器固定在行车的升降机构上并置于消声水池中,入水深度基本一致约为1.5 m,两换能器间距为8 m,发射电压为20 V,且全向换能器发射脉宽为4 ms的20 kHz~30 kHz的变频信号,本测试使用的待测圆柱阵渔用声呐每个扇区包含20个波束,从-22.5°至22.5°。 图11 试验平台 测试时全向换能器所在行车从消声水池一侧匀速移至另一侧,圆柱阵待测换能器保持静止。由于测试环境的限制,每个扇区包含从主要对正对全向换能器的波束进行分析,其测试结果如图12所示。 图12 不同圆弧阵加权方式的单波束测试结果 由图12的测试结果可得,换能器的期望指向性0°与实际角度有2°~3°的偏差,可能是由于在安装换能器时与行车的升降机构未完全对齐0°方向。由上述测试波形可得,抑制区最小功率法的主瓣在试验过程中展宽约4°,旁瓣较未加权的波束主瓣降低约10 dB;由于测试时会有轻微抖动,根据理论仿真中相似加权的主瓣展宽约为1°,相似加权法的主瓣几乎和加权前主瓣宽度一致在试验过程中不易看出,但旁瓣相较于与加权前降低了约6 dB。抑制区最小功率加权法对旁瓣的抑制较好,但相较于相似加权的主瓣展宽较大,由于相邻两波束间隔为2.25°,因此当主瓣展宽大于波束间隔时,会造成后期成像时无法分辨距离较近的多个目标。试验结果与第4章节的仿真结果较为接近,因此两种加权方式改善了圆柱阵换能器的指向性,但由于两种非线性加权方式还未被广泛应用在圆柱阵换能器中,所以其改进和完善的空间较大,可以通过优化基阵中阵子的排列方式和权值等方式抑制旁瓣和减少主瓣的展宽。 Matlab仿真和消声水池的测试发现,非线性加权法能够有效改善水平全向扫描多波束渔用声呐的波束指向性,其中相似加权法的效果较为理想,可以达到在主瓣展宽较小的前提下有效抑制旁瓣的目的,当波束间隔小于波束展宽时,抑制区最小功率法将不再适用。由于消声水池测试环境的限制,测试时仅使用了正对目标的一个扇区的接收波束成形数据,因此今后将进一步完善测试环境及设施,对整个基阵进行接收指向性测试,从而获得更加准确的测试结果。


3.2 线性加权仿真


4 非线性加权
4.1 相似加权


4.2 抑制区最小功率法加权


5 试验测试
6 结论
猜你喜欢
舰船科学技术(2023年11期)2023-07-22通信学报(2019年5期)2019-06-11人大建设(2018年11期)2019-01-31测控技术(2018年1期)2018-11-25水下无人系统学报(2018年5期)2018-11-09少年文艺·开心阅读作文(2018年9期)2018-09-28声学与电子工程(2017年1期)2017-06-22爆笑show(2016年1期)2016-03-04新课程研究(2016年21期)2016-02-28西北工业大学学报(2015年3期)2015-12-14
