
履带式农机底盘在超湿黏土地面的通过性研究
2023-08-18 02:14王海霞卢立富李加坤胡忠义许永超
山东交通学院学报 2023年3期
王海霞,卢立富,李加坤,胡忠义,许永超
1.山东交通学院汽车工程学院,山东 济南 250357;2.山东泰开隔离开关有限公司,山东 泰安 271000
0 引言
履带式农机装备在超湿地面上作业时通过性较差,易导致农作物无法及时足量收获,给农民收入和国家粮食储备带来较大损失。农机装备在超湿地面的通过性研究涉及土壤力学特性、装备结构信息、地形地貌信息及装备与地面间的耦合关系,影响因素多且耦合关系复杂,是车辆地面力学及农机装备领域的研究难点及热点之一。研究学者多采用仿真分析和试验验证方法研究农机装备在超湿地面上的通过性问题。吕唯唯等[1]、杨聪彬[2]、朱兴高[3]通过仿真分析和室内试验研究加载速率、土壤含水率和通过次数等因素对地面土壤承载特性的影响规律,构建地面土壤的动态承压模型和剪切经验模型;Yang等[4]提出采用Bekker承压模型的土壤沉陷与土壤力学特性参数、含水率及重复加载关系的理论模型;Sitkei等[5]采用量纲分析法归纳土壤的力学特性试验数据,提出具备广适性的土壤力学模型;Beregi等[6]基于轮胎与土壤间的复杂耦合关系,分析轮胎非线性动力学,构建轮胎牵引力的理论模型;Cutini等[7]研究轮胎与冰雪地面的复杂耦合关系,提出车辆在冰雪路面上行驶时的牵引力评估方法;曾得贵[8]采用离散元方法研究履带车辆在干燥松软地面上行驶时履带与地面间的耦合关系,分析履带与地面相互耦合时地面土壤的滑移剪切破坏过程;Nicolini等[9]基于履带与地面的耦合作用关系构建考虑地面力学特性的履带车辆-地面多体动力学仿真模型,分析履带车辆的越障能力;Tang等[10]构建履带-地面非线性模型,提出高可靠性、通用性、模块化的履带动力学仿真算法;Mason等[11]提出基于圆锥指数法的履带车辆在松软路面上一次性通过的评估方法,构建以负重轮负载、最小离地间隙、履带平均最大接地压力及地面土壤强度为关键参数的车辆越野通过性经验模型;Sebastian等[12]综合考虑滑移滑转、地形坡度、土壤力学特性和履带的履刺效应等因素对履带装备越野通过性的影响,提出基于履带与崎岖地面动态耦合关系的车辆路径规划算法;Wong等[13]研究履带车辆越野机动性的评估模型,认为基于物理参数评估的理论模型更适合履带车辆越野机动性分析;Choi等[14]开发基于可靠性的随机越野机动地图生成框架,对地面车辆的机动性和GO/NO-GO决策进行不确定性量化和可靠性评估;黄雪涛等[15]以负重轮沉陷为评价指标,分析履带装备在黏土地面上的通过性;申彦等[16]研究火星车通过性评价技术,分析火星车通过性研究的发展趋势;吉旭等[17]研究山地履带自走式辣椒收获机底盘的动力学仿真技术,并采用实车验证仿真结果的合理性;韩振浩等[18]研究山地果园履带底盘坡地的通过性,优化履带底盘的结构,提高山地果园履带底盘的通过性。目前,在土壤承压剪切滑移破坏机理、土壤承载模型构建、履带-地面耦合关系、履带装备越障能力等方面的研究较多,但对履带式农机底盘在超湿黏土地面上通过性方面的研究较少。
本文采用理论推导、仿真分析和试验验证相结合的方法,构建履带式农机底盘超湿黏土地面通过性的多体动力学仿真模型,以挂钩牵引力为评价指标,分析履带式农机底盘在超湿黏土地面上的通过性,以期为履带式农机装备的结构设计提供理论基础和数据支撑。
1 超湿黏土土壤力学特性参数
描述土壤承载作用的模型主要包括Bekker承压模型、Reece承压模型和Korchunov承压模型等。Bekker承压模型应用最广,超湿黏土土壤的Bekker承压模型为:
p=(kc/b+kφ)zn=kzn,
式中:p为作用在超湿黏土土壤单位面积上的压力,kc为超湿黏土土壤的黏聚模量,b为圆形压板的半径,kφ为超湿黏土土壤的摩擦模量,z为载荷作用下超湿黏土土壤的沉陷,n为超湿黏土土壤的变形指数,k为超湿黏土土壤承压模量。
为获取超湿黏土地面土壤的力学特性参数,原位采集超湿黏土地面的土壤,并以土壤的圆锥指数为评价指标,确保实验室重构土壤与原位土壤的力学性能一致。选取半径分别为70、90 mm的圆形压板代替车轮,测试并绘制压板在超湿黏土地面土壤上的承压位移曲线,获取Bekker承压模型的力学特性参数。采用改装后的高精度电子万能试验机进行室内压板试验,测量压强为75 kPa时的土壤沉陷和所受载荷,进行承载特性试验(压板试验)时设加载速度为50 mm/min,在b=90 mm的压板上施加垂直载荷1.9 kN,在b=70 mm的压板上施加垂直载荷1.2 kN,计算可得超湿黏土地面土壤样本的kc=315 kN/mn+1,kφ=9 500 kN/mn+2。
采用莫尔-库伦强度理论计算超湿黏土样本的最大抗剪强度
τmax=c+ptanφ,
(1)
式中:c为超湿黏土土壤的内聚力,φ为超湿黏土土壤的内摩擦角。
采用ZJ型应变控制式直剪仪测试土样的剪切曲线,施加的垂直载荷分别为25、50、75、100 kPa,加压静止2 min。土壤样本达到平衡状态后,以2.4 mm/min的剪切速度进行直剪试验,得到超湿黏土土壤样本的剪应力-剪切位移关系曲线,如图1所示。

图1 超湿黏土土壤样本剪应力-剪切位移关系曲线 图2 不同垂直载荷下土壤的抗剪强度
由图1可知:在同一垂直载荷作用下,剪应力随剪切位移的增大而增大,当剪应力达到某一峰值后,随剪切位移的增大,剪应力基本保持不变;垂直载荷越大,剪应力越大。取超湿黏土土壤剪应力-位移曲线上的峰值作为抗剪强度,得到不同垂直载荷下超湿黏土土壤的抗剪强度,如图2所示。由图2可知:可用直线拟合超湿黏土土壤的抗剪强度与垂直载荷间关系,即τmax=12.96+ptan 21.63°,由式(1)可得超湿黏土土壤的c=12.96 kPa,φ=21.63°。
2 履带式农机底盘超湿黏土地面通过性仿真模型
以某型号履带式农机底盘为研究对象,分析履带式农机底盘在超湿黏土地面上的通过性,构建履带式农机底盘超湿地面的多体动力学仿真模型,主要结构参数如表1所示。整车离地间隙为280 mm,驱动力矩为500 N·m。

表1 履带式农机底盘主要结构参数 单位:mm
履带式农机底盘在超湿黏土壤土地面上的通过性取决于底盘的接地压力分布、地面承载能力、地面抗剪能力及轮胎与地面间的耦合关系等,影响因素较多且关系复杂,搭建仿真模型时需综合考虑这些因素。轮胎与超湿黏土地面间的耦合关系包括土壤承载模型、土壤力学特性参数及土壤与轮胎间摩擦系数等。选取Bekker承压模型及Janosi剪切模型作为土壤承载的标准模型,采用超湿黏土土壤力学特性试验获取的参数作为土壤力学特性参数,在软件Recurdyn中定义土壤的kc=315 kN/mn+1,kφ=9 500 kN/mmn+2,n=2.1,c=12.96 kPa,φ=21.63°、土壤抗剪变形系数为74.3,沉陷比为0.05,实现履带与地面间耦合参数的定义。结合表1及超湿黏土地面特性信息,构建履带式农机底盘超湿黏土地面仿真分析模型,如图3所示。
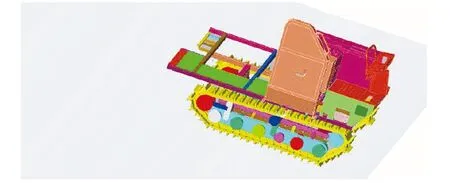
图3 履带式农机底盘超湿黏土地面通过性仿真模型
3 履带式农机底盘超湿黏土地面通过性仿真分析
履带式农机底盘在超湿黏土地面通过性的主要评价指标包括圆锥指数、平均最大接地压力、负重轮沉陷和挂钩牵引力等。采用圆锥指数评价通过性快速简便但可靠性较低;采用平均最大接地压力评价通过性,因未考虑土壤的力学特性及履带与地面的复杂耦合关系,精确度较低;采用负重轮沉陷评价通过性,考虑履带装备的结构参数及履刺的影响,具有一定的准确度,但未考虑履带张紧力及履带环对地面的包络效果,仍有一定局限性;采用挂钩牵引力评价通过性,可借助动力学仿真技术,综合考虑履带装备的结构参数、地面地貌、土壤力学特性参数及履带与地面间的耦合关系,精确度较高。
以挂钩牵引力为指标分析履带式农机底盘在超湿黏土地面上的通过性。地面提供的挂钩牵引力为:
FDP=FH,max-FR,
(2)
式中:FH,max为履带农机底盘沿前进方向的最大牵引力,FR为所有行驶阻力之和。
由超湿黏土壤土的抗剪强度决定履带式农机地盘在超湿黏土地面上行驶时产生的FH,max,根据库仑方程,可得[3]:
=39 944-7 066(1-e5.652 8i)/i
(3)
式中:bt为履带板的宽度,bt=0.400 m;L为履带的接地长度,L=4.200 m;h为履带板高度,h=0.074 m;m为履带装备质量,m=2 141 kg;k为超湿黏土壤土的剪切模量系数,k=0.743;i为滑转率。
计算履带农机底盘FR的公式为半经验公式,可表示为:
(4)
经计算得FR=1 554.2 N。将式(3)(4)带入式(2),可得FDP=38 389.8-7 066(1-e-5.6528i)/i。
FDP随i的变化曲线见图4。由图4可知:在超湿黏土壤土地面上行驶时,履带式农机底盘出现滑移滑转现象,FDP随i的增大而增大。i=0时,FDP=-1.442 kN,底盘无法通过该超湿黏土地面;i接近1.0时,FDP最大,FDP=31.348 kN,FDP为正,底盘可通过该超湿黏土地面。
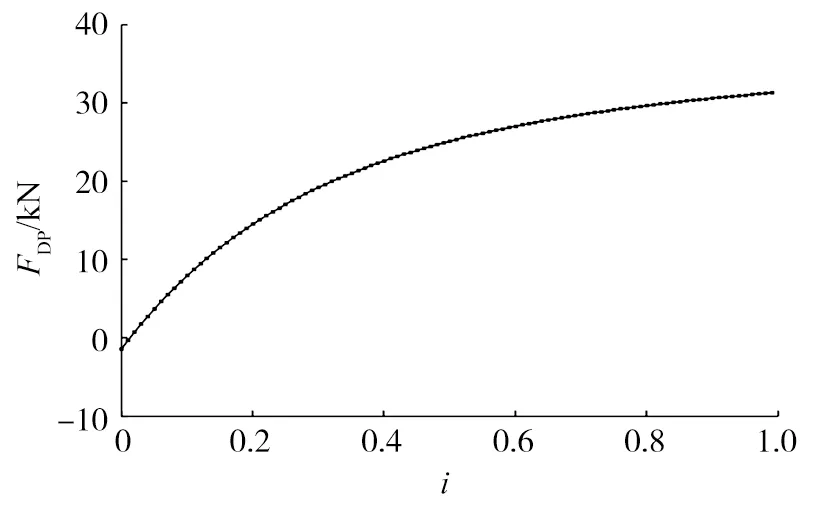
图4 FDP随i的变化曲线
采用动力学仿真分析履带式农机底盘在超湿黏土地面上的通过性,建立履带式农机底盘的多体动力学仿真模型,由式(2)计算FDP的变化情况,可得履带式农机装备超湿黏土地面上的通过性。
履带式农机底盘在超湿黏土地面上沿前进方向的最大牵引力
FVH,max=Tiv/r,
(5)
式中:r为主动轮半径,r=122 mm;T为发动机的额定扭矩,T=500 N·m;iv为履带式农机底盘最大传动比,iv=6。
经计算得FVH,max=24 590 N。在超湿黏土地面上行驶时,履带式农机底盘与地面间的最大牵引力由地面提供给底盘的最大牵引力及底盘自身所能提供的最大牵引力二者中较小的决定。
由式(3)(5)可知:履带式农机底盘可提供的最大牵引力为24.590 kN,履带与地面间的最大附着力为32.902 kN。

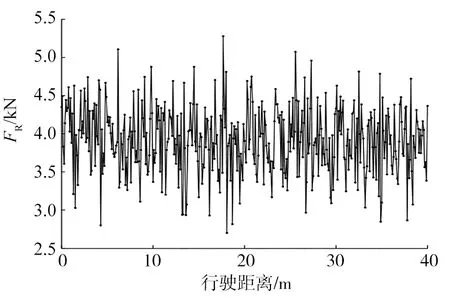
图5 FR与行驶距离的关系曲线
4 FDP的仿真分析与实车验证
4.1 FDP的仿真分析结果

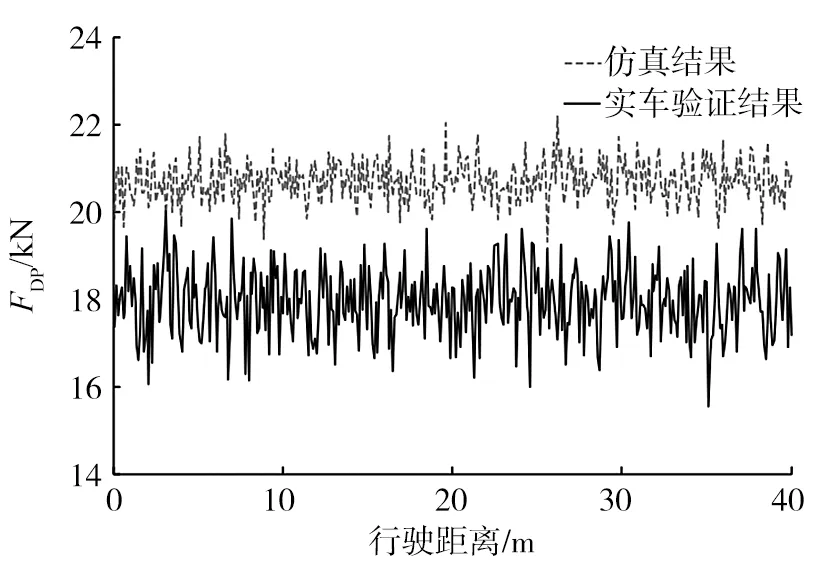
图6 底盘的FDP与行驶距离的关系
4.2 实车验证
为验证履带式农机底盘超湿黏土地面通过性仿真分析结果的可靠性,采用实车验证的方法分析履带式农机底盘FDP的变化规律。
在履带式农机底盘安装绞盘及绞车,绞盘后的托绳保持水平方向,在绞盘和托绳中间放置拉力传感器,固定绞车不动,履带式农机底盘置一档且加到最大油门,拉力传感器的读数即为底盘的最大驱动力,为22.896 kN。
采用绞车绞盘拖动履带式农机装备以5 km/h的速度在水平的超湿黏土地面上匀速行驶,在底盘前端的托绳上安装拉力传感器,测量履带式农机底盘行驶阻力的变化,托绳保持水平方向。履带式农机底盘FDP的试验结果与仿真结果的对比曲线如图6所示。

5 结束语
研究履带式农机底盘在超湿黏土地面上的通过性,基于超湿黏土壤土的力学特性及履带式农机底盘的结构参数,构建履带式农机底盘超湿黏土地面通过性的仿真模型,以挂钩牵引力为评价指标,采用仿真分析和实车验证相结合,结果表明在超湿黏土地面上作业时,仿真分析的履带式农机底盘的平均挂钩牵引力为20.000 kN,实车验证结果为17.923 kN,均远大于0,履带式农机底盘可顺利通过黏湿土地面。研究结果可为履带式农业装备的设计研发和优化升级提供理论基础和技术支撑。
猜你喜欢
中学生数理化·八年级物理人教版(2023年4期)2023-05-05
中国石油石化(2021年8期)2021-03-30
哈尔滨铁道科技(2020年3期)2021-01-18
石油化工建设(2019年6期)2020-01-16
中学生数理化·高一版(2016年4期)2016-11-19
物理与工程(2016年3期)2016-08-31
学习月刊(2016年19期)2016-07-11
专用汽车(2016年4期)2016-03-01
学习月刊(2015年1期)2015-07-11
汽车维护与修理(2015年5期)2015-02-28
