
涡旋压缩机主轴传动系统动平衡仿真分析
2023-08-18 06:37杨潍泽冯治国苏亚峰
机械设计与制造 2023年8期
杨潍泽,冯治国,苏亚峰
(贵州大学机械工程学院,贵州贵阳 550025)
1 引言
随着全球不可再生资源的短缺和环保意识的增强,新能源取代传统能源是大势所趋,在汽车行业,具有节能环保等特点的新能源汽车逐步替代传统汽车亦成为行业共识。电动汽车是新能源汽车发展的主流,这推动了为电动汽车空调系统配套的电动涡旋压缩机产业的发展。电动涡旋压缩机具有高效率、高可靠性和低噪声等优点,通过电机驱动主轴和动涡旋盘绕静涡旋盘做公转平动,实现压缩腔容积周期性变化完成对冷媒介质的做功。涡旋压缩机为满足型线啮合需要传动系统采用偏心配置,因此动涡旋盘的质心并不处于涡旋盘的基圆中心轴线上,由此偏心质量产生离心惯性力将引起压缩机的振动,进而影响压缩机运转的安全性、可靠性、寿命和效率,所以对涡旋压缩机主轴传动系统进行严格的平衡尤为重要。
文献[1]通过“变转速、多平面、分步平衡”的方法完成了涡旋压缩机的动平衡试验,结果表明在高速运转条件下涡旋压缩机能够保持低振状态;文献[2−4]通过对涡旋压缩机主轴传动系统组件的参数化建模,并以平衡重的质量、形状尺寸和轴向分布为变量,实现了主轴的模态参数和主副轴承所受力和力矩的优化,结果显示轴承支撑力显著降低,提高了主轴稳定性;文献[5−6]实现了在气体力作用下以主副平衡块质量、平衡块安装角为变量,以主副轴承、机架的受力优化目标的优化分析,通过与传统方法对比结果表明方法有效。
这里通过理论分析并结合动力学仿真软件对电动涡旋压缩机主轴传动系统的动平衡问题进行了研究,分析不同转速、平衡块和偏心轮质量对轴系受力的影响,通过ADAMS 的优化模块,以偏心块和平衡块质量为优化变量主轴承支撑力为目标进行优化设计。
2 涡旋压缩机构模型的建立
涡旋压缩机主轴传动系统由电机转子、主轴、偏心块、轴承、防旋环、动涡旋盘组件以及主副平衡块组成,如图1所示。涡旋压缩机主轴被设计为带有偏心轴段的阶梯轴,并且运用防旋环销防止动涡旋盘自转,使得动涡旋盘在主轴带动下相对静涡旋盘中心作公转平动,完成动静盘间吸排气腔容积的变化,实现压缩冷媒做功。动涡旋盘与主轴曲柄销采用轴承联接,有利于降低摩擦功耗和配合端面磨损,动涡盘组件质量包含动盘轴承、防旋环的质量和涡旋盘质量。涡旋压缩机主轴传动系统动不平衡量主要由动涡旋盘组件、曲轴曲柄销、偏心块以及主副平衡块四部分所产生的离心惯性力和惯性力矩组成。
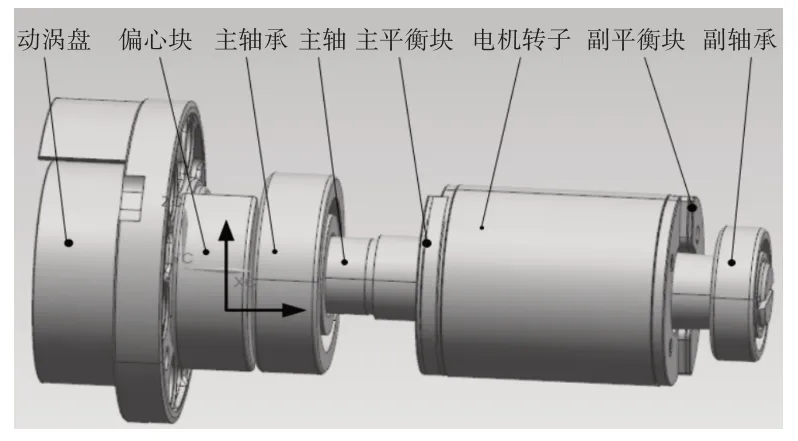
图1 涡旋压缩机主轴传动系统结构示意图Fig.1 Structure Diagram of Scroll Compressor Spindle Drive System
3 动平衡理论分析
由于涡旋齿是非对称结构,因此动涡旋盘的质心并不处于动涡旋盘的基圆中心,一般采用先移动动涡旋盘质心再平衡轴向惯性力和力矩的两步平衡法对涡旋压缩机进行动平衡。第一步是考虑到动涡旋盘底板有一定厚度通过增加或减少一定质量,将动涡旋盘的质心移动至动涡旋齿的基圆中心的轴线上,即一次平衡,增加或减少的质量即为一次平衡重。动涡旋盘底板一次平衡,如图2所示。
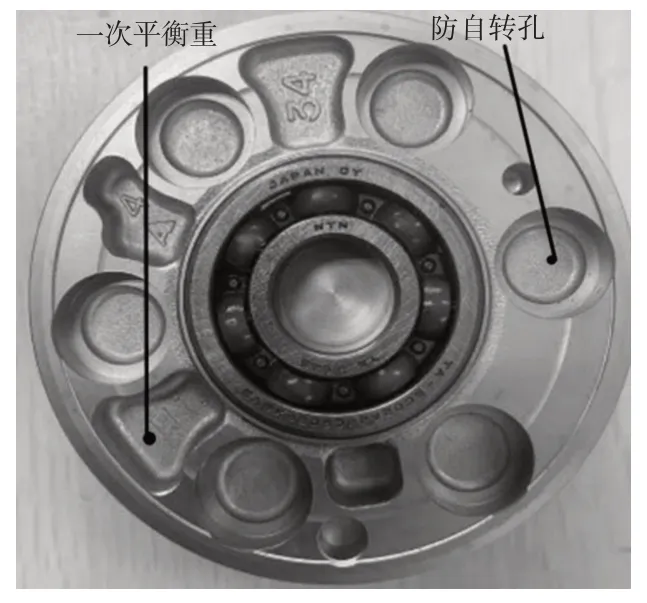
图2 动涡旋盘底板一次平衡Fig.2 Primary Balance of Scroll Plate Bottom Plate
动涡旋盘相对于主轴偏心布置于曲柄销的轴颈位置,因此动涡旋盘的离心惯性力会通过动盘轴承传递到曲轴上,为了使主轴传动系统动平衡,沿主轴轴向配置平衡质量以平衡动涡旋盘和曲柄销产生的离心惯性力和力矩,实现主轴系统的二次平衡,以减小主轴承的动载荷。
二次平衡受力模型,如图3 所示。将动涡旋盘与主轴作为一体,认为各组件的惯性力均作用与对应部件质心位置,图示惯性力、惯性力矩处于平衡,则有平衡方程[9−10],如式(1)、式(2)所示:

图3 二次平衡中主轴受力模型Fig.3 Stress Model of Spindle in Quadratic Equilibrium
惯性力平衡:
力矩平衡:
A−A面:
其中,F=mιRιω2。
式中:mι—离心部件质量;
Rι—各偏心重相对主轴的旋转半径;
ω—主轴的角速度;
Li—各离心部件质心到A−A截面距离。
涡旋压缩机主轴传动系统受工作环境、承受频繁的振动和冲击载荷、安装结构尺寸等条件的限制,偏心块和平衡块的功能需求和形状已经确定,只能通过调整偏心块和主副平衡块的制造方法(改变密度)来改变配重进而优化动平衡状况。定义如式(3)平衡系数τ、ξ,当平衡系数∈[]0.9,1.1 认为主轴传动系统得到有效平衡。
通过EXCEL 规划求解功能以式(3)为约束函数,式(1)、式(2)取最小值为目标函数求解设计变量,转速取10000r/min,其计算结果为:偏心块质量124.51g,主平衡块25.2g,副平衡块24.8g,力平衡系数1.004,力矩平衡系数1.008,剩余不平衡力和力矩分别为2.65N 和233.5N·mm。原设计计算结果为:力平衡系数1.002,力矩平衡系数0.78,剩余不平衡力和力矩分别为2.38N和12175.5N·mm。
4 基于Adams的动平衡仿真
4.1 设计变量与仿真条件设置
将在UG NX中建立的涡旋压缩机主轴传动系统机构模型导入至ADAMS,由于偏心块和平衡块的功能需求和形状已经确定,因此优化设计时以偏心块、电机转子主副平衡块的质量为(改变密度)优化变量。
ADAMS/view 中约束分为四类即低副、基本副、耦合副和特殊副。涡旋压缩机主轴传动系统在Adams/view中各旋转运动部件的约束关系定义,如表1所示。通过各部件质量实测值以及在UG NX中测量的各部件的体积反推各部件等效密度,涡旋压缩机传动系统各运动部件质量和等效密度,如表2所示。表中动盘组件的质量包括涡旋盘、防旋环和滚珠轴承,转子的质量不包括转子主副平衡块质量,平衡块质量为单片平衡块质量。
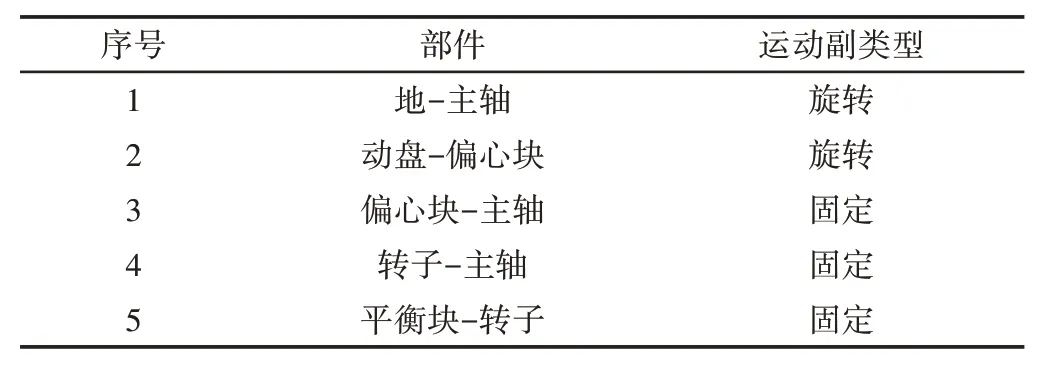
表1 各部件约束关系Tab.1 Constraint Relationship of Each Component
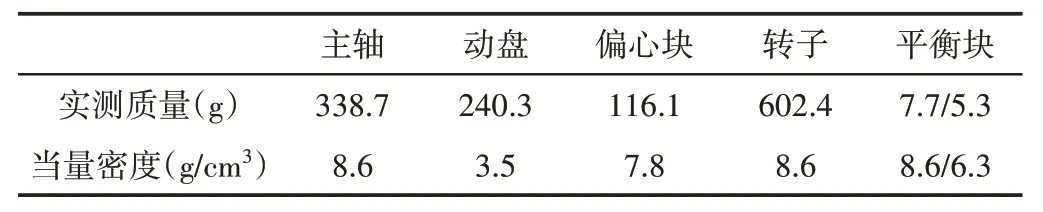
表2 分析模型基本参数Tab.2 Analysis Model Basic Parameters
4.2 主轴转速对不平衡力和力矩的影响
该型涡旋压缩机设计工况转速(10000~12000)r/min,由动平衡方程可知偏心重离心惯性力与主轴转速的平方成比例,因此在平衡主轴传动系统离心惯性力时,需要先明确转速对主轴承所受力和力矩的影响。各部件以设计实测值为初始值,分别计算10000r/min、10800r/min和12000r/min三组转速条件下主轴承所受的力和力矩结果,如图4所示。由图可知主轴承所受的力和力矩均随转速的增大而增大,其中惯性力增幅明显,力和力矩变化方向理论计算结果一致,因此对于寻找主轴承所受动载荷最小的研究选一种转速状态分析即可。如图4(a)和图4(d)所示主轴传动系统不平衡力Fy和不平衡力矩Tz方向的平衡值均偏离0轴,可知在现有安装尺寸下难以完全平衡。
4.3 偏心块质量对不平衡力和力矩的影响
在已知速度对主轴承所受力和力矩的影响的情况下,选用10000r/min作为主轴转速,确定偏心块对压缩机涡旋部件轴系的影响。主副平衡块分别选用设计值,根据EXCEL规划求解计算结果列表偏心块质量分别选用100g,116g,130g,160g,180g五组结果,如图5所示。由图可知主轴承所受力和力矩均随偏心块质量的增大而先减小后增大,不过力和力矩的增减区间不同,其增减区间分别为[100,130]、[130,180],可知只调节偏心块质量难以使压缩机涡旋部件轴系不平衡力和不平衡力矩同时达到平衡,因此涡旋压缩机主轴传动系统平衡至少需要两块平衡重。


图5 不同偏心块质量下不平衡力和力矩Fig.5 Unbalanced Forces and Torques Under Different Eccentric Block Masses
4.4 平衡块对不平衡力和力矩的影响
由于只有偏心块不平衡力和不平衡力矩无法同时得到平衡,选择在电机转子两端增加偏心量,即电机转子两端主副平衡块,平衡块有两种规格的设计,如表2所示。偏心块质量取设计值,两种规格平衡块取三块,其配比方式,如表3所示。结果,如图6所示。可知主平衡块对主轴承支撑力为正效益,对力矩为负效益,副平衡块对主轴承支撑力矩为正效益,对力平衡为负效益,即主平衡块有利于力平衡,副平衡块有利于力矩平衡,可知单一调整主副平衡块不能同时对力和力矩的平衡有利。

表3 平衡块配比Tab.3 Balance Block Ratio
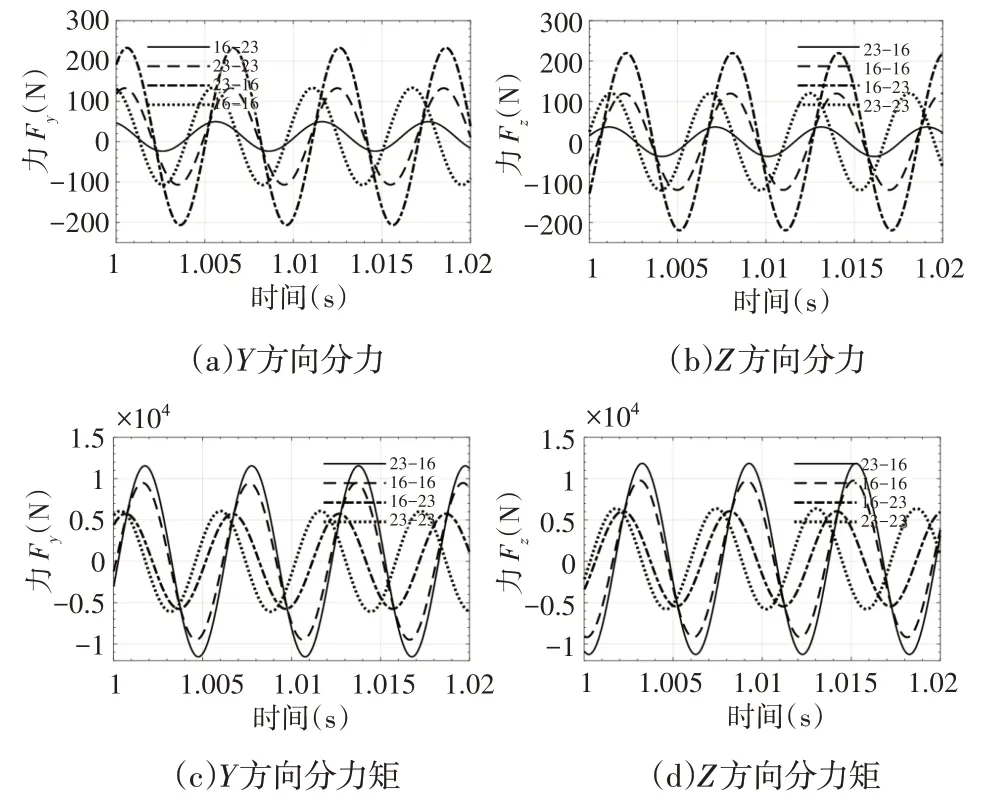
图6 不同平衡块质量下不平衡力和力矩Fig.6 Unbalanced Forces and Torques Under Different Weights of Balance Blocks
4.5 平衡重质量计算
根据以上对各变量的分析,以偏心块、主副平衡块质量(改变密度)为优化变量,偏心块、平衡块取值范围分别为[100,180]、[5,40],由于涡旋压缩机的振动主要是由于力矩的波动引起的,因此以主轴承所受力矩为目标,进行优化设计。优化结果,如图7 所示。主轴承受的力和力矩与原设计相比明显降低,其幅值分别下降了60%和96%,此时偏心块为143g,主平衡块为32g,副平衡块为31g,此时力平衡系数1.03,力矩平衡系数0.91,主轴承所受力和力矩的幅值分别为32.5N 和1755N·mm。优化后力和力矩平衡系数均满足要求,不过平衡效果远低于EXCEL规划求解的结果,这是由于EXCEL只考虑了单一平面内的特定位置的优化结果。
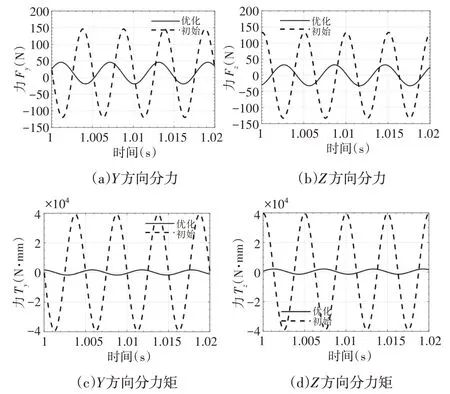
图7 计算结果Fig.7 Calculation Results
5 结论
(1)涡旋压缩机传动系统不平衡力和力矩随主轴转速的增大而增大与理论计算一致,动平衡分析时只需研究一个转速即可。
(2)偏心块质量对不平衡力和力矩的影响较大,表明调整偏心块质量能有效平衡不平衡力和力矩,虽然不平衡力和力矩随着偏心块质量的增加都先减后增,但是变化区间不重合,因此涡旋压缩机动平衡问题至少需要两端面配重来解决。
(3)电机转子主副平衡块对不平衡力和力矩的影响不同,主平衡块有利于力平衡但会增强力矩不平衡,副平衡块有利于力矩平衡但会增强力不平衡。理论计算结果与仿真结果均表明在主副平衡块安装角呈180°时应采用等质量配比方式。
(4)通过优化平衡重的质量,平衡系数未能达到理想值,表明在平衡重现有安装尺寸条件下力和力矩无法完全平衡,需调整平衡重质心位置和轴向尺寸进一步优化。
猜你喜欢
中学生数理化·八年级物理人教版(2023年3期)2023-03-21
北京航空航天大学学报(2022年7期)2022-08-06
初中生学习指导·提升版(2022年3期)2022-03-19
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
一重技术(2021年5期)2022-01-18
中央民族大学学报(自然科学版)(2018年1期)2018-06-27
女子世界(2017年3期)2017-03-13
河北地质(2016年1期)2016-03-20
制造技术与机床(2015年10期)2015-04-09
组合机床与自动化加工技术(2014年9期)2014-03-01
